

Tehase põrandad seisavad, kui silindrid ebaõnnestuvad. Insenerid satuvad paanikasse, sest tootmisliinid peatuvad ilma hoiatuseta. Enamik inimesi ei mõista kunagi elegantset füüsikat, mis paneb need automatiseerimise tööloomad toimima.
Silinder töötab suruõhu või hüdraulilise vedeliku abil, et tekitada rõhkude vahe kolbipinnal, muutes vedeliku rõhu lineaarseks mehaaniliseks jõuks vastavalt Pascali seadus1 (F = P × A), mis võimaldab tööstusliku automatiseerimise jaoks kontrollitud lineaarset liikumist.
Eelmisel nädalal sain kiireloomulise kõne Robertolt, Itaalia tehase juhilt, kelle villimisliin oli 6 tundi seisma jäänud. Tema hooldusmeeskond vahetas balloone juhuslikult välja, mõistmata, miks need ei töötanud. Käsitlesin neile videokõne kaudu põhilisi tööpõhimõtteid ja nad tuvastasid tegeliku probleemi - saastunud õhuvarustus. Liin töötas taas 30 minutiga, mis säästis neile $15 000 kaotatud toodangut.
Sisukord
- Mis on silindri põhiline tööpõhimõte?
- Kuidas sisekomponendid koos töötavad?
- Millist rolli mängib rõhk ballooni töös?
- Kuidas töötavad erinevad silindritüübid?
- Kuidas juhtimissüsteemid panevad silindrid tööle?
- Millised jõud ja arvutused reguleerivad silindri tööd?
- Kuidas mõjutavad keskkonnategurid silindri tööd?
- Millised tavalised probleemid takistavad silindri nõuetekohast tööd?
- Kuidas integreeruvad kaasaegsed balloonid automaatikasüsteemidega?
- Kokkuvõte
- Korduma kippuvad küsimused balloonide töö kohta
Mis on silindri põhiline tööpõhimõte?
Silindri tööpõhimõte põhineb ühel füüsika tähtsaimal seadusel, mis avastati üle 350 aasta tagasi.
Silindrid töötavad Pascali seaduse alusel, mille kohaselt piiratud vedeliku suhtes rakendatav rõhk kandub võrdselt kõikides suundades, võimaldades vedeliku rõhu muundamist lineaarseks mehaaniliseks jõuks, kui rõhkude erinevus mõjub kolvi pindalal.
Pascali seaduse sihtasutus
Blaise Pascal avastas 1653. aastal, et rõhk, mida rakendatakse kuskil piiratud vedelikus, jaotub võrdselt kogu vedeliku mahus. See põhimõte on kõigi hüdraulika- ja pneumosilindrite töö aluseks.
Praktiliselt öeldes, kui suruõhu rõhk balloonis on 6 baari, mõjub see sama 6 baari rõhk igale pinnale balloonis, sealhulgas kolbipinnale.
Maagia toimub seetõttu, et kolb saab liikuda, samas kui teised pinnad ei saa. See tekitab lineaarse jõu ja liikumise tekitamiseks vajaliku rõhkude vahe.
Rõhu diferentseerimise kontseptsioon
Silindrid töötavad, tekitades erinevat rõhku kolvi vastaskülgedel. Kõrgem rõhk ühel poolel tekitab netojõu, mis surub kolvi madalama rõhu poole.
Rõhkude erinevus määrab jõu väljundi: kui ühel poolel on 6 baari ja teisel poolel 1 baar (atmosfäär), siis on netorõhkude erinevus 5 baari, mis mõjub kolvi piirkonnas.
Maksimaalne jõud tekib siis, kui üks pool saab süsteemi täisrõhu, samal ajal kui teine pool väljub atmosfääri, tekitades suurima võimaliku rõhkude erinevuse.
Jõu genereerimise matemaatika
Kõikide silindrite tööpõhimõtete puhul kehtib põhiline jõuvõrrand F = P × A, kus jõud on võrdne rõhu ja kolvi efektiivse pindala korrutisega. See lihtne seos määrab silindri suuruse ja jõudluse.
Rõhuühikud on ülemaailmselt erinevad - 1 baar vastab 14,5 PSI või 100 000 Pascalile. Pindala arvutamisel kasutatakse kolvi tegelikku läbimõõtu, võttes arvesse varraste pindala kahetoimeliste konstruktsioonide puhul.
Tegelik jõud on tavaliselt 85-90% teoreetilisest, mis tuleneb hõõrdekadudest, tihendite takistustest ja voolupiirangutest, mis vähendavad tegelikku rõhku.
Energia muundamise protsess
Silindrid muudavad salvestatud vedelikuenergia kasulikuks mehaaniliseks tööks. Suruõhk või rõhu all olev hüdrauliline vedelik sisaldab potentsiaalset energiat, mis vabaneb paisumisel.
Pneumaatiliste (25-35%) ja hüdrauliliste (85-95%) süsteemide energiatõhusus erineb oluliselt, mis on tingitud survekadudest ja soojuse tekkimisest.
Konversiooniprotsess hõlmab mitut energiamuundamist: elektriline → kokkusurumine → vedeliku surve → mehaaniline jõud → kasulik töö.
Kuidas sisekomponendid koos töötavad?
Sisekomponentide koostoimimise mõistmine näitab, miks nõuetekohane hooldus ja kvaliteetsed komponendid on usaldusväärse toimimise jaoks olulised.
Silindri sisekomponendid töötavad koos ühtse süsteemina, kus silindrikorpus sisaldab rõhku, kolb teisendab rõhu jõuks, tihendid hoiavad rõhupiirid ja varras edastab jõu väliskoormusele.
Silindrikorpuse funktsioon
Silindri korpus on surveanum, mis sisaldab töövedelikku ja juhib kolvi liikumist. Enamasti kasutatakse õmblusteta terastorusid või alumiiniumist pressprofiile, mis tagavad optimaalse tugevuse ja kaalu suhte.
Sisemine pinnaviimistlus mõjutab kriitiliselt jõudlust - lihvitud puurid pinnaviimistlusega 0,4-0,8 Ra tagavad sujuva töö. plommi töö2 ja komponentide pikendatud kasutusiga.
Seina paksus peab vastu pidama töörõhule koos asjakohaste ohutusteguritega. Standardsed tööstussilindrid töötlevad 10-16 baari, kusjuures konstruktsioonis on sisseehitatud 4:1 ohutusvaru.
Korpuse materjalid on süsinikteras üldiseks kasutamiseks, roostevaba teras korrosiivse keskkonna jaoks ja alumiiniumisulamid kaalutundlike rakenduste jaoks.
Kolvi kokkupaneku toimimine
Kolb toimib liikuva survepiirina, mis muudab vedeliku rõhu lineaarseks jõuks. Kolvi konstruktsioon mõjutab oluliselt silindri jõudlust, tõhusust ja kasutusiga.
Kolbimaterjalide puhul kasutatakse tavaliselt alumiiniumi kergete ja kiirete rakenduste jaoks või terast suurte jõududega tööde jaoks. Materjali valik mõjutab kiirendusomadusi ja jõuvõimet.
Kolbitihedused loovad kriitilise rõhu piiri silindrite vahel. Esmased tihendid hoolitsevad rõhu piiramise eest, samas kui teiseseid tihendeid kasutatakse lekete ja saastumise vältimiseks.
Kolvi läbimõõt määrab otseselt jõu väljundit vastavalt F = P × A. Suuremad kolvid tekitavad rohkem jõudu, kuid nõuavad suuremat vedeliku mahtu ja voolu mahtu.
Süsteemi integreerimine
Tihendid toimivad ühtse süsteemina, kus iga tüüp täidab konkreetseid ülesandeid. Esmased kolbtihendid säilitavad rõhu eraldatuse, vardatihendid takistavad väliseid lekkeid ja puhastusmehhanismid eemaldavad saaste.
Tihendusmaterjalid peavad vastama töötingimustele - NBR üldiseks kasutamiseks, polüuretaan kulumiskindluse tagamiseks, PTFE keemilise ühilduvuse tagamiseks ja Viton kõrge temperatuuri jaoks.
Tihendi paigaldamine nõuab täpset tehnikat ja nõuetekohast määrimist. Vale paigaldus põhjustab kohese rikke ja halva töö, mis mõjutab kogu süsteemi.
Tihendi jõudlus mõjutab otseselt silindri tõhusust, kuna kulunud tihendid vähendavad jõu väljundit ja põhjustavad ebaühtlast tööd, mis mõjutab tootmiskvaliteeti.
Varda ja otsakorkide koost
Kolbvarras edastab silindri jõu väliskoormusele, säilitades samal ajal rõhutihendi terviklikkuse. Varraste konstruktsioon peab toime tulema rakendatavate jõududega ilma paindumise või liigse läbipaindumise eest.
Varraste materjalide hulka kuuluvad kroomitud teras korrosioonikindluse tagamiseks, roostevaba teras karmide keskkondade jaoks ja spetsiaalsed sulamid ekstreemsete tingimuste jaoks.
Otsakorgid tihendavad silindri otsad ja pakuvad kinnituskohti. Nad peavad vastu pidama süsteemi täisrõhule ja välistele paigalduskoormustele ilma rikete või lekkimiseta.
Paigalduskonfiguratsioonide hulka kuuluvad kinnitusviisid: klamber, kandur, äärik ja jalg. Õige paigaldusvalik hoiab ära pingete kontsentratsiooni ja komponentide enneaegse rikke.
| Komponent | Materjalide valikud | Põhifunktsioon | Ebaõnnestumise mõju |
|---|---|---|---|
| Silindrikorpus | Teras, alumiinium, SS | Rõhu piiramine | Täielik süsteemi rike |
| Kolvi | Alumiinium, teras | Jõu muundamine | Vähenenud jõudlus |
| Tihendid | NBR, PU, PTFE, Viton | Rõhu isoleerimine | Lekkumine, saastumine |
| Rod | Kroomteras, SS | Jõu edastamine | Koormuse käitlemise rike |
| Otsakatted | Teras, alumiinium | Süsteemi sulgemine | Survekadu |
Millist rolli mängib rõhk ballooni töös?
Rõhk on põhiline energiaallikas, mis võimaldab silindri tööd ja määrab tööomadused.
Rõhk mängib silindri töös keskset rolli, andes liikumapaneva jõu, määrates maksimaalse jõuväljundi, mõjutades töökiirust ning mõjutades süsteemi tõhusust ja töökindlust.
Surve kui energiaallikas
Suruõhk või hüdrauliline vedelik sisaldab salvestatud energiat, mis vabanedes muundub mehaaniliseks tööks. Suurem rõhk salvestab rohkem energiat mahuühiku kohta.
Pneumaatiliste ja hüdrauliliste süsteemide rõhuenergia tihedus on väga erinev. Hüdraulikasüsteemid töötavad 100-300 baariga, samas kui pneumaatilised süsteemid kasutavad tavaliselt 6-10 baari.
Energia vabanemise kiirus sõltub voolu võimsusest ja rõhkude erinevusest. Kiire rõhumuutus võimaldab silindri kiiret tööd, samas kui kontrollitud vabastamine tagab sujuvat liikumist.
Süsteemi rõhk peab püsima stabiilsena, et tagada püsiv jõudlus. Rõhu kõikumine põhjustab ebakorrapäraseid liikumisi ja vähenenud jõutootmist, mis mõjutab tootmiskvaliteeti.
Jõu väljundi suhe
Jõutugevus on otseselt korrelatsioonis töörõhuga vastavalt F = P × A. Rõhu kahekordistamine kahekordistab olemasolevat jõudu, mistõttu rõhu reguleerimine on jõudluse seisukohalt kriitilise tähtsusega.
Efektiivne rõhk on võrdne tarnerõhuga miinus kaod ventiilide, liitmike ja voolupiirangute kaudu. Süsteemi projekteerimisel tuleb optimaalse jõudluse saavutamiseks vähendada neid kadusid.
Rõhkude erinevus kolvi kohal määrab netojõu. Vasturõhk heitgaasi poolel vähendab efektiivset rõhku ja kasutatavat jõudu.
Maksimaalne teoreetiline jõud tekib maksimaalse süsteemirõhu ja atmosfääri heitgaasisurve korral, mis tekitab suurima võimaliku rõhkude vahe.
Kiiruse reguleerimine rõhu abil
Silindri kiirus sõltub voolukiirusest, mis on seotud rõhkude erinevusega voolupiirangute vahel. Suuremad rõhkude erinevused suurendavad voolukiirust ja silindri kiirust.
Voolureguleerimisventiilid kasutavad kiiruse reguleerimiseks rõhulangusi. Sisse- ja väljavoolu reguleerimine piirab toitevoolu, samas kui väljavoolu reguleerimine piirab heitgaasivoolu erinevate omaduste puhul.
Rõhu reguleerimine säilitab püsiva kiiruse vaatamata koormuse muutustele. Ilma reguleerimiseta muutub kiirus vastavalt koormuse muutumisele ja toiterõhu kõikumisele.
Kiirväljalaskeklapid mööduvad voolupiirangutest, et kiirendada liikumist, võimaldades kiiret rõhu väljalaskmist otse atmosfääri.
Süsteemi rõhu juhtimine
Rõhuregulaatorid säilitavad püsiva töörõhu hoolimata toitevoolu kõikumistest. See tagab korratava töö ja kaitseb komponente ülerõhu eest.
Rõhuvabastusklapid pakuvad ohutuskaitset, piirates süsteemi maksimaalset rõhku. Nad hoiavad ära rõhu piikide või süsteemihäirete tekitatud kahjustused.
Akumulaatorisüsteemid salvestavad rõhu all olevat vedelikku, et tulla toime tippnõudlusega ja siluda rõhu kõikumisi. Need parandavad süsteemi reageerimist ja tõhusust.
Rõhu jälgimine võimaldab ennetavat hooldust, tuvastades lekked, ummistused ja komponentide lagunemise enne, kui need põhjustavad rikkeid.
Kuidas töötavad erinevad silindritüübid?
Erinevad silindrite konstruktsioonid toimivad samadel aluspõhimõtetel, kuid erinevad konfiguratsioonid on optimeeritud konkreetsete rakenduste ja jõudlusnõuete jaoks.
Erinevad balloonitüübid töötavad sama rõhkude erinevuse põhimõttel, kuid nende käivitamismeetod, paigaldusviis ja sisemine konfiguratsioon varieeruvad, et optimeerida jõudlust konkreetsete rakenduste ja töötingimuste jaoks.
Ühetoimelise silindri töö
Ühetoimelised silindrid avaldavad survet ainult kolvi ühele küljele, kasutades tagasiliikumiseks vedrusid või raskusjõudu. Selline lihtne konstruktsioon vähendab õhutarbimist ja juhtimise keerukust.
Vedruga tagastussilindrid kasutavad sisemisi survevedrusid, mis tõmbavad kolvi tagasi, kui rõhk langeb. Usaldusväärseks tagasipöördumiseks peab vedru jõud ületama hõõrdumise ja välised koormused.
Gravitatsioonipöörde konstruktsioonid tuginevad tagasitõmbamisel kaalule või välisjõududele. See sobib vertikaalsetele rakendustele, kus raskusjõud aitab tagasiliikumist ilma vedrusid kasutamata.
Jõuväljundit piirab vedrujõud pikenduse ajal. Vedru vähendab välitööks kasutatavat netojõudu, mistõttu on vaja suuremaid silindreid samaväärse võimsuse saavutamiseks.
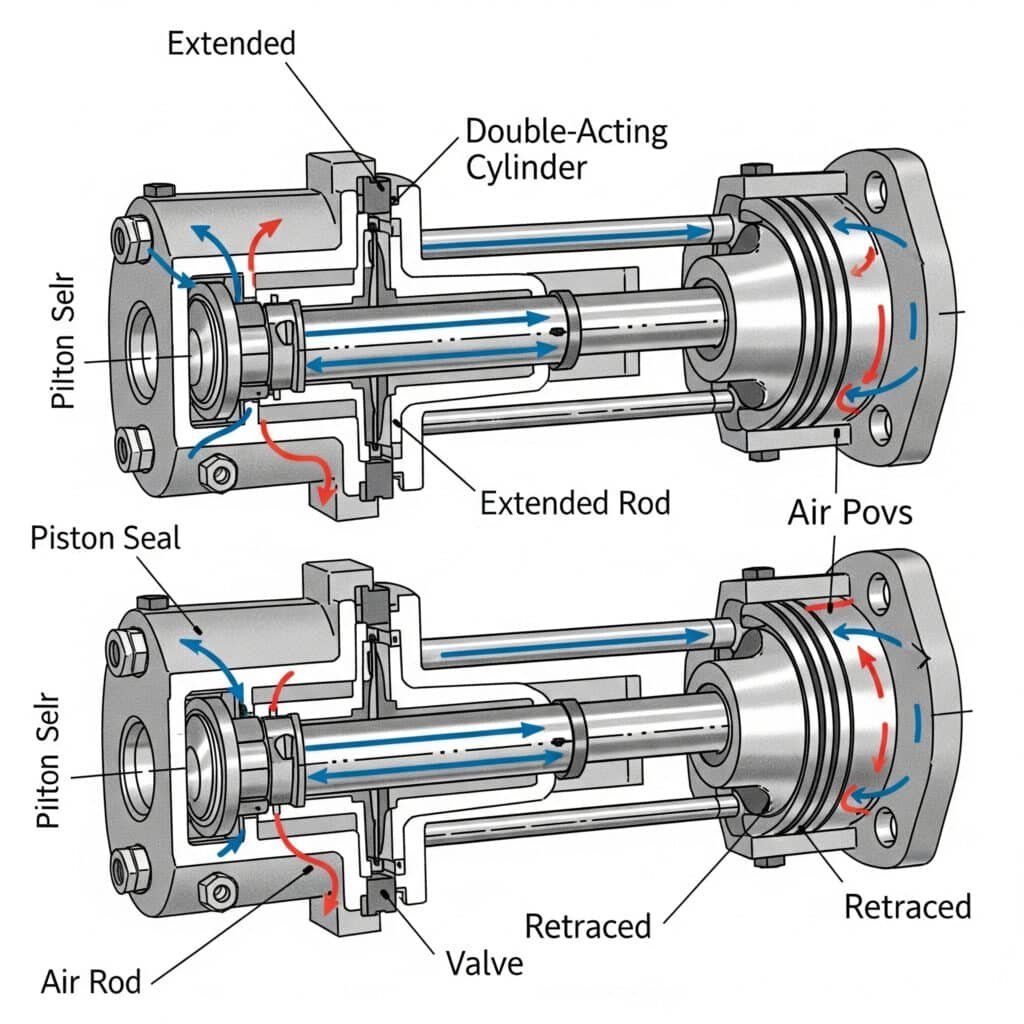
Kahepoolse toimega silindri töö
Kahepoolse toimega silindrid avaldavad survet mõlemale poole vaheldumisi, tagades mõlemas suunas liikuva jõu ja kiiruse sõltumatu reguleerimise.
Välja ja sisse tõmbamise jõud on erinevad, kuna varda pindala vähendab kolvi efektiivset pindala ühel poolel. Väljapööramisjõud on tavaliselt 15-20% võrra suurem kui sissetõmbamisjõud.
Sõltumatu voolujuhtimine võimaldab mõlemas suunas erinevaid kiirusi, optimeerides tsükli kestust erinevate koormustingimuste ja rakendusnõuete puhul.
Asendi hoidmise võime on suurepärane, kuna rõhk säilitab asendi välise jõu vastu mõlemas suunas ilma energiatarbimiseta.
Teleskoop silindri funktsioon
Teleskoopsilindrid saavutavad pikad töömahud kompaktsetes pakettides, kasutades mitut järjestikku pikendatavat astet. Iga etapp tõuseb täielikult välja enne järgmise algust.
Rõhujuhtimissüsteemid tagavad nõuetekohase järjestuse toimimise sisemiste kanalite või väliste kollektorite kaudu, mis reguleerivad voolu igasse astmesse.
Jõutugevus väheneb iga laienemisastmega, kuna efektiivne pindala väheneb. Esimene aste annab maksimaalse jõu, samas kui viimased astmed annavad minimaalse jõu.
Tagasitõmbamine toimub vastupidises järjekorras, kusjuures viimane väljavenitatud aste tõmbub esimesena tagasi. See säilitab struktuurilise terviklikkuse ja hoiab ära sidumise.
Pöördesilindri töö
Pöörlevad silindrid muudavad lineaarse kolviliikumise pöörlevaks väljundiks sisemiste hammasratta- või tiivikmehhanismide abil rakenduste jaoks, mis nõuavad pöörlevat liikumist.
Hammasratta ja hammasratta konstruktsioonides kasutatakse lineaarset kolviliikumist hammasratta ajamiseks, mis paneb pöörlema hammasratta võlli. Pöördenurk sõltub löögi pikkusest ja hammasratta suhtest.
Pöörlevad silindrid kasutavad tiivikutele mõjuvat survet, et tekitada otsest pöörlemisliikumist ilma lineaarsete ja pöörlevate mehhanismide vaheliste muundamismehhanismideta.
Pöördemomendi väljund sõltub rõhust, efektiivsest pindalast ja momendivarrest. Suuremad rõhud ja suuremad efektiivsed pindalad suurendavad kasutatavat pöördemomenti.
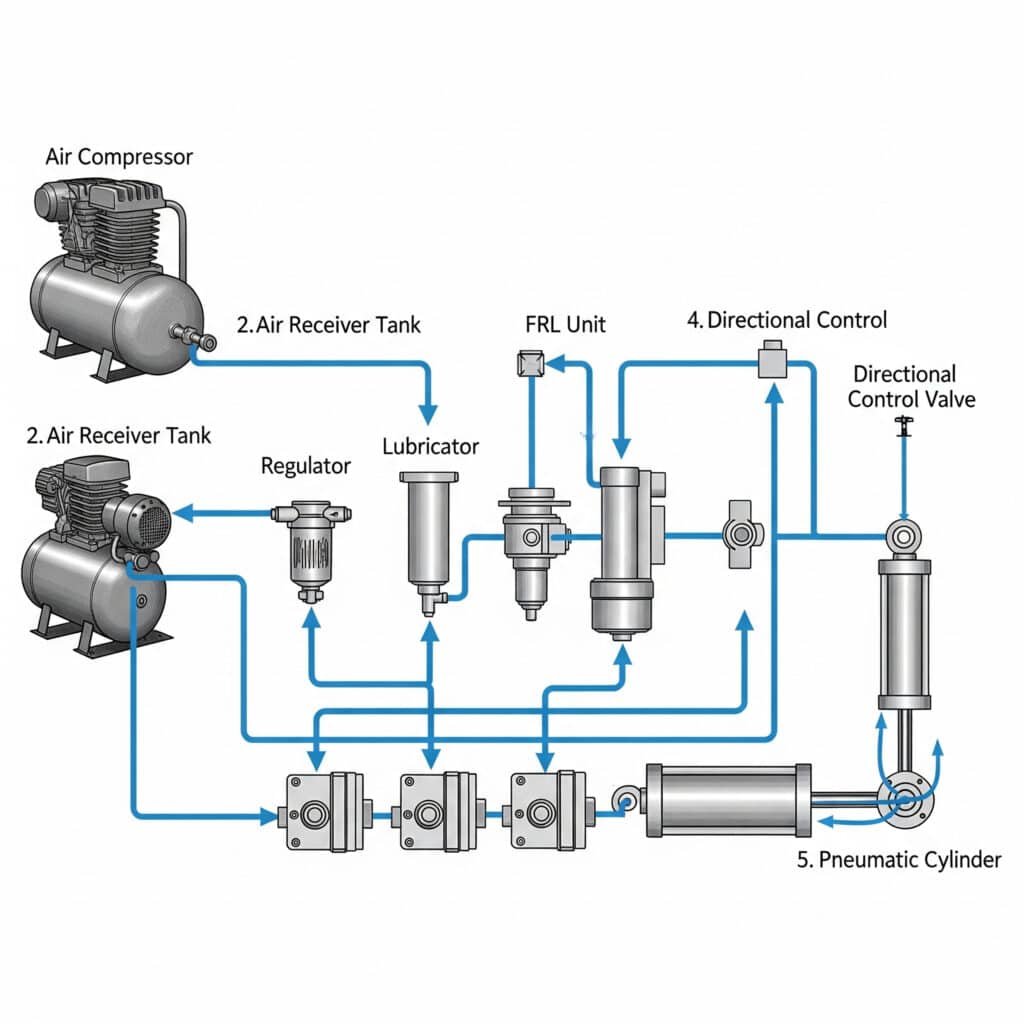
Kuidas juhtimissüsteemid panevad silindrid tööle?
Juhtimissüsteemid korraldavad silindrite tööd, juhtides õhuvoolu, rõhku ja ajastust, et saavutada soovitud liikumisprofiilid ja süsteemi koordineerimine.
Juhtimissüsteemid panevad silindrid tööle, kasutades suunaventiile vedeliku voolu suuna reguleerimiseks, voolu reguleerimisventile kiiruse reguleerimiseks, rõhu reguleerimist jõu juhtimiseks ja andureid tagasiside andmiseks täpse töö tagamiseks.
Suunaventiili töö
Suunaventiilid määravad vedeliku vooluteed silindrite pikendamiseks või sisselülitamiseks. Tavalised konfiguratsioonid on 3/2-tee-ventiilid ühetoimeliste ja 5/2-tee-ventiilid kahetoimeliste silindrite puhul.
Klappide käivitamise meetodid on käsitsi, pneumaatiline piloot, solenoid ja mehaaniline toimimine. Valik sõltub juhtimissüsteemi nõuetest ja rakenduse vajadustest.
Klapi reageerimisaeg mõjutab süsteemi jõudlust kiirete rakenduste puhul. Kiirelt reageerivad ventiilid võimaldavad kiireid suunamuutusi ja täpset ajastusjuhtimist.
Vooluvõimsus peab vastama silindri nõuetele soovitud töökiiruste puhul. Alamõõdulised ventiilid tekitavad piiranguid, mis piiravad jõudlust ja tõhusust.
Voolukontrolli integreerimine
Vooluhulgaklapid reguleerivad vedeliku vooluhulka, et kontrollida silindri kiirust ja kiirendusomadusi. Sisselülitamise reguleerimine mõjutab kiirendust, samas kui väljalülitamise reguleerimine mõjutab aeglustamist.
Kahesuunaline voolujuhtimine võimaldab sõltumatut kiiruse reguleerimist väljapoole ja sissepoole liikumisel, optimeerides tsükli kestust erinevate koormustingimuste puhul.
Rõhukompenseeritavad voolu reguleerimisseadmed säilitavad püsiva kiiruse vaatamata rõhu kõikumistele, tagades korratava jõudluse erinevates töötingimustes.
Elektrooniline voolujuhtimine kasutab proportsionaalventiilide abil täpset, programmeeritavat kiiruse reguleerimist muutuva kiirendus- ja aeglustusprofiiliga.
Rõhu reguleerimise süsteemid
Rõhuregulaatorid säilitavad püsiva töörõhu, et tagada korduv jõu väljund ja stabiilne jõudlus hoolimata toiterõhu kõikumistest.
Rõhulülitid annavad lihtsat tagasisidet asendi kohta, mis põhineb kambri rõhul, tuvastades töö lõpu tingimusi ja süsteemi häireid.
Proportsionaalne rõhu reguleerimine võimaldab muutuvat jõu väljundit rakenduste jaoks, mis nõuavad töö ajal või erinevate toodete puhul erinevat jõutaset.
Rõhu seiresüsteemid avastavad lekked, ummistused ja komponentide lagunemise enne, kui need põhjustavad süsteemi rikkeid või ohutusriski.
Andurite integreerimine
Asendiandurid annavad tagasisidet suletud ahelaga juhtimissüsteemidele. Erinevate täpsusnõuete jaoks on saadaval magnetilised reed-lülitid, Halli efektiandurid ja lineaarkoodrid.
Lõpplülitid tuvastavad töö lõppasendid ja pakuvad ohutuslukustusi, et vältida liigset liikumist ja kaitsta süsteemi komponente kahjustuste eest.
Rõhuandurid jälgivad süsteemi jõudlust ja avastavad tekkivad probleemid, nagu lekked, piirangud või komponentide kulumine, enne rikete tekkimist.
Temperatuuriandurid kaitsevad ülekuumenemise eest pidevas kasutuses olevates rakendustes ja annavad andmeid prognoosivate hooldusprogrammide jaoks.
Süsteemi integreerimise võimekus
PLC-integratsioon võimaldab koordineerimist teiste masinafunktsioonidega standardsete kommunikatsiooniprotokollide ja I/O-ühenduste kaudu keerukate automaatikasüsteemide jaoks.
Võrguühendus võimaldab kaugseiret ja -juhtimist läbi tööstusvõrgud3 nagu Ethernet/IP, Profibus või DeviceNet tsentraliseeritud haldamiseks.
HMI-liidesed pakuvad operaatorile kontrolli ja süsteemi jälgimise võimalusi puuteekraanide ja graafiliste kasutajaliideste kaudu.
Andmete salvestamine salvestab toimivusandmed süsteemi toimimise ja hoolduse analüüsiks, tõrkeotsinguks ning optimeerimiseks.
Millised jõud ja arvutused reguleerivad silindri tööd?
Silindrite tööga seotud jõudude ja arvutuste mõistmine võimaldab õiget mõõtmist, jõudluse prognoosimist ja süsteemi optimeerimist.
Silindrite tööd reguleerivad jõuarvutused (F = P × A), kiiruse võrrandid (V = Q/A), kiirendusanalüüs (F = ma) ja tõhususe tegurid, mis määravad mõõtmisnõuded ja jõudlusomadused.
Põhilised jõuarvutused
Teoreetiline jõud on võrdne rõhu ja efektiivse kolbipinna korrutisega: F = P × A. See põhiline võrrand määrab maksimaalse kasutatava jõu ideaalsetes tingimustes.
Efektiivne pindala erineb kahetoimeliste silindrite puhul välja- ja sissetõmbamisel: A_extend = π × D²/4, A_retract = π × (D² - d²)/4, kus D on kolvi läbimõõt ja d on varda läbimõõt.
Praktiline jõud arvestab tõhususe kaotust, mis tavaliselt ulatub 85-90% teoreetilisest, mis on tingitud hõõrdumisest, tihendi takistusest ja voolupiirangutest.
Arvutatud koormuste suhtes tuleks kohaldada ohutustegureid, tavaliselt 1,5-2,5 sõltuvalt rakenduse kriitilisusest ja koormuse määramatusest.
Kiiruse ja voolu suhted
Silindri pöörlemiskiirus on seotud mahuvooluhulgaga: V = Q/A, kus kiirus on võrdne vooluhulgaga, mis jagatakse kolvi efektiivse pindalaga.
Vooluhulk sõltub ventiili võimsusest, rõhkude erinevusest ja süsteemi piirangutest. Voolupiirangud kuskil süsteemis vähendavad maksimaalset saavutatavat kiirust.
Kiirendusaeg sõltub netovõimest ja liikuvast massist: t = (V × m)/F_net, kus suuremad netovõimed võimaldavad kiiremat kiirendust soovitud kiirusele.
Aeglustusomadused sõltuvad heitgaasi voolu võimsusest ja vasturõhust. Pehmendussüsteemid kontrollivad aeglustust, et vältida löökkoormust.
Koormuse analüüsi nõuded
Staatilised koormused hõlmavad komponentide kaalu, protsessijõude ja hõõrdumist. Kõik staatilised jõud tuleb enne liikumise algust ületada.
Dünaamilised koormused lisavad liikumise ajal kiirendusjõudu: F_dünaamiline = F_staatiline + (m × a), kus kiirendusjõud võivad oluliselt ületada staatilisi koormusi.
Külgkoormusi ja -momente tuleb arvestada juhtimissüsteemi õigeks mõõtmiseks. Silindrite külgkoormuse kandevõime on ilma väliste juhikuteta piiratud.
Kombineeritud koormusanalüüs tagab, et kõik jõukomponendid on usaldusväärse töö tagamiseks silindri ja süsteemi võimekuse piires.
Õhutarbimise arvutused
Õhutarbimine tsükli kohta on võrdne silindri mahu ja rõhu suhtega: V_õhk = V_silinder × (P_absoluut/P_atmosfäär).
Kahepoolse toimega silindrid tarbivad õhku mõlema töötsükli puhul, samas kui ühepoolse toimega silindrid tarbivad õhku ainult jõuallikaga töötava töötsükli puhul.
Ventiilide, liitmike ja lekete kaudu tekkivad süsteemikaod lisavad teoreetilisele tarbimisväärtusele tavaliselt 20-30%.
Kompressori mõõtmine peab toime tulema tippnõudluse ja kadudega ning tagama piisava reservvõimsuse, et vältida rõhu langust töö ajal.
Tulemuslikkuse optimeerimine
Puurimõõdu valikul on jõuvajadus tasakaalus kiiruse ja õhutarbimisega. Suuremad puurid annavad rohkem jõudu, kuid kasutavad rohkem õhku ja võivad liikuda aeglasemalt.
Löögi pikkus mõjutab õhukulu ja reageerimisaega. Pikemad löögikäigud nõuavad suuremat õhumahtu ja pikemat täitumisaega liikumise käivitamiseks.
Töörõhu optimeerimisel võetakse arvesse jõu vajadust, energiakulusid ja komponentide kasutusiga. Suurem rõhk vähendab silindri suurust, kuid suurendab energiakulu.
Süsteemi tõhusus paraneb komponentide õige suuruse, minimaalse rõhulanguse ja tõhusa õhutöötluse abil, mis vähendab kadusid ja hooldust.
| Parameeter | Arvutus | Üksused | Tüüpilised väärtused |
|---|---|---|---|
| Jõudu | F = P × A | Newtons | 500-50,000N |
| Kiirus | V = Q/A | m/s | 0,1-10 m/s |
| Õhutarbimine | V = löögi pikkus × pindala × rõhu suhe | liitrit/tsükkel | 1-50 L/tsükkel |
| Võimsus | P = F × V | Watts | 100-10,000W |
Kuidas mõjutavad keskkonnategurid silindri tööd?
Keskkonnatingimused mõjutavad oluliselt silindri jõudlust, töökindlust ja kasutusiga erinevate mehhanismide kaudu, mida tuleb süsteemi projekteerimisel arvesse võtta.
Keskkonnategurid mõjutavad silindrite tööd temperatuurimuutuste kaudu, mis muudavad vedeliku omadusi ja tihendite toimivust, saastumise kaudu, mis põhjustab kulumist ja talitlushäireid, niiskuse kaudu, mis tekitab korrosiooni, ja vibratsiooni kaudu, mis kiirendab komponentide väsimist.
Temperatuuri mõju toimimisele
Töötemperatuur mõjutab vedeliku viskoossust, tihedust ja rõhku. Kõrgemad temperatuurid vähendavad õhu tihedust ja efektiivset jõudu pneumaatikasüsteemides.
Tihendusmaterjalidel on temperatuuripiirangud, mis mõjutavad töövõimet ja kasutusiga. Standardsed NBR-tihendid töötavad temperatuurivahemikus -20°C kuni +80°C, samas kui spetsiaalsed materjalid laiendavad temperatuurivahemikku.
Komponentide soojuspaisumine võib mõjutada vahekaugusi ja tihendite toimivust. Konstruktsioon peab arvestama soojuse kasvu, et vältida sidumist või liigset kulumist.
Kondensatsioon tekib, kui suruõhk jahtub alla kastepunkti temperatuuri. Vee kogunemine põhjustab korrosiooni, külmumist ja ebakorrektset tööd.
Saastumise mõju
Tolm ja prahi põhjustavad tihendite kulumist, klappide kinnijäämist ja sisemiste komponentide kahjustusi. Saastumine on silindri enneaegse rikke peamine põhjus.
Osakeste suurus mõjutab kahjustuste raskusastet - tihendite vahekaugusest suuremad osakesed põhjustavad koheseid kahjustusi, samas kui väiksemad osakesed põhjustavad järkjärgulist kulumist.
Keemiline saastumine ründab tihendeid ja põhjustab korrosiooni. Materjalide kokkusobivus on kriitiline kemikaalide, lahustite või protsessivedelike keskkonnas.
Niiskusesaaste põhjustab sisekomponentide korrosiooni ja võib külmades tingimustes jäätuda, blokeerides õhukanalid ja takistades tööd.
Niiskus ja korrosioon
Kõrge õhuniiskus suurendab suruõhusüsteemides kondensatsiooniohtu. Õhu jahtumisel kondenseerub veeaur, tekitades süsteemis vedelat vett.
Korrosioon mõjutab teraskomponente ja võib põhjustada lõhestumist, katlakivi tekkimist ja lõpuks rikkeid. Roostevaba teras või kaitsekatted takistavad korrosioonikahjustusi.
Galvaaniline korrosioon tekib, kui erinevad metallid puutuvad kokku niiskuse juuresolekul. Õige materjalivalik hoiab ära galvaanilise korrosiooni probleemid.
Drenaažisüsteemid peavad eemaldama kogunenud vee süsteemi madalatest punktidest. Automaatsed drenaažid hoiavad ära vee kogunemise, mis tekitab tööprobleeme.
Vibratsiooni ja löökide mõju
Mehaaniline vibratsioon põhjustab kinnitusvahendite lõdvenemist, tihendite nihkumist ja komponentide väsimist. Nõuetekohane paigaldus ja isolatsioon kaitsevad vibratsioonikahjustuste eest.
Kiiretest suunamuutustest või välistest löökidest tulenevad löögikoormused võivad kahjustada sisemisi komponente. Pehmendussüsteemid vähendavad löökkoormust ja pikendavad kasutusiga.
Resonants võimendab vibratsiooni mõju, kui töösagedused vastavad komponentide omaloomingulistele sagedustele. Projekteerimisel tuleks vältida resonantsi tekkimist.
Vundamendi stabiilsus mõjutab süsteemi jõudlust. Jäik paigaldus takistab liigset vibratsiooni, samas kui paindlik paigaldus tagab isolatsiooni.
Kõrguse ja rõhu mõju
Suur kõrgus vähendab õhurõhku, mis mõjutab pneumosilindri jõudlust. Võimsus väheneb, kui õhurõhk väheneb.
Rõhkude erinevuse arvutamisel tuleb arvesse võtta kõrguse mõju. Meretaseme arvutused ei kehti otseselt kõrgel asuvate rajatiste puhul.
Õhu tihedus väheneb kõrgusega, vähendades massivoolu ja mõjutades silindri kiiruse omadusi konstantse mahuvoolu korral.
Kompressori jõudlus väheneb ka kõrguse kasvades, mistõttu on süsteemi jõudluse säilitamiseks vaja suuremaid kompressoreid või kõrgemat töörõhku.
Millised tavalised probleemid takistavad silindri nõuetekohast tööd?
Üldiste probleemide ja nende algpõhjuste mõistmine võimaldab tõhusat tõrkeotsingut ja ennetava hoolduse strateegiaid.
Sagedasemad ballooniprobleemid hõlmavad tihendite lekkeid, mis põhjustavad jõu kadumist, saastumist, mis põhjustab ebakorrektset liikumist, ebaõiget mõõtmist, mis viib halva jõudluseni, ja ebapiisavat õhu töötlemine4 mille tulemuseks on komponentide enneaegne rike.
Tihendiga seotud probleemid
Kambritevaheline sisemine leke vähendab jõu väljundit ja põhjustab aeglast tööd. Kulunud kolbtihendid on kõige tavalisem töövõime halvenemise põhjus.
Väline leke varda ümber tekitab ohutusriski ja raiskab suruõhku. Tihendi rike tuleneb tavaliselt saastumisest või pinnakahjustusest.
Tihendi väljapressimine toimub siis, kui tihendid surutakse kõrge rõhu all tühimikku. See kahjustab tihendeid ja tekitab püsivaid lekkekohti.
Kuumusest või keemilisest kokkupuutest tingitud tihendi kõvenemine vähendab paindlikkust ja tihendamise tõhusust. Õige materjalivalik hoiab ära keemilise ühilduvuse probleemid.
Saastumisküsimused
Osakeste saastumine kiirendab tihendite kulumist ja põhjustab ventiili talitlushäireid. Ebapiisav filtreerimine on saastumisprobleemide peamine põhjus.
Vee saastumine põhjustab korrosiooni ja võib külmades tingimustes jäätuda. Õhukuivatus hoiab ära veega seotud probleemid ja pikendab komponentide kasutusiga.
Kompressorite õlireostus põhjustab tihendite paisumist ja lagunemist. Õlivabad kompressorid või tõhus õli eemaldamine takistab saastumist.
Keemiline saastumine ründab tihendeid ja metallkomponente. Materjalide ühilduvuse analüüs hoiab ära keemilised kahjustused karmides keskkondades.
Mõõtmis- ja rakendusprobleemid
Alamõõdulised silindrid ei suuda anda rakendusele piisavat jõudu, mille tulemuseks on aeglane töö või suutmatus töötsüklit lõpule viia.
Liiga suured balloonid raiskavad energiat ja võivad töötada liiga kiiresti, et seda saaks korralikult kontrollida. Õige dimensioneerimine optimeerib jõudlust ja energiatõhusust.
Ebapiisavad juhtsüsteemid võimaldavad külgkoormust, mis põhjustab sidumist ja enneaegset kulumist. Külgkoormuse rakenduste puhul võivad olla vajalikud välised juhikud.
Ebakorrektne paigaldus tekitab pingekontsentratsioone ja ebakõlasid, mis kiirendavad komponentide kulumist ja vähendavad süsteemi töökindlust.
Süsteemi projekteerimise küsimused
Ebapiisav vooluvõimsus piirab silindri kiirust ja tekitab rõhulangusi, mis vähendavad jõu väljundit ja süsteemi tõhusust.
Halb ventiili valik mõjutab reageerimisaega ja voolu omadusi. Klapi maht peab optimaalse jõudluse saavutamiseks vastama ballooni nõuetele.
Ebapiisav õhutöötlus võimaldab saastumisel ja niiskusel kahjustada komponente. Korralik filtreerimine ja kuivatamine on töökindluse tagamiseks hädavajalik.
Ebapiisav rõhureguleerimine põhjustab ebaühtlast tööd ja võib ülerõhu tõttu kahjustada komponente.
Hooldusega seotud probleemid
Harvad filtrivahetused võimaldavad saastumise kogunemist, mis kahjustab komponente ning vähendab süsteemi töökindlust ja jõudlust.
Ebakorrektne määrimine põhjustab suurenenud hõõrdumist ja kiirendatud kulumist. Probleeme tekitavad nii alavõi liigne määrimine.
Tihendi väljavahetamise edasilükkamine võimaldab väiksematel lekkedel muutuda suurteks riketeks, mis nõuavad ulatuslikku remonti ja põhjustavad pikemat seisakuaega.
Tulemuslikkuse järelevalve puudumine takistab tekkivate probleemide varajast avastamist, mida saaks parandada enne rikete tekkimist.
| Probleemi kategooria | Sümptomid | Põhjused | Ennetamise meetodid |
|---|---|---|---|
| Tihendi rike | Lekkumine, vähenenud jõud | Saastumine, kulumine | Puhas õhk, nõuetekohased materjalid |
| Saastumine | Ebakorrapärane liikumine, kleepumine | Kehv filtreerimine | Piisav õhutöötlus |
| Mõõtküsimused | Halbade tulemustega | Vale valik | Korrektsed arvutused |
| Süsteemi probleemid | Ebajärjekindel tegevus | Disaini puudused | Professionaalne disain |
| Hooldus | Enneaegne ebaõnnestumine | Hooletusseadmete hooletusse jätmine | Plaaniline hooldus |
Kuidas integreeruvad kaasaegsed balloonid automaatikasüsteemidega?
Kaasaegsed balloonid sisaldavad täiustatud tehnoloogiaid ja kommunikatsioonivõimalusi, mis võimaldavad sujuvat integreerimist keerukate automaatikasüsteemidega.
Kaasaegsed balloonid integreeruvad automaatikasüsteemidega sisseehitatud andurite abil, mis annavad tagasisidet asendi kohta, elektrooniliste juhtimisseadmete abil, mis tagavad täpse töö, sideprotokollide abil võrguühenduse ja diagnostikavõimaluste abil ennetava hoolduse jaoks.
Andurite integreerimise tehnoloogiad
Sisseehitatud asendiandurid välistavad välise anduriga seotud nõuded, andes samal ajal täpset asendi tagasisidet suletud ahelaga juhtimissüsteemidele.
Magnetandurid tuvastavad kolvi asendi läbi silindrite seinte, kasutades Halli efekti või magnetoresistiivset tehnoloogiat, mis annab analoogpositsioonisignaalid.
Optilised kodeerijad, mis on paigaldatud välistele kanduritele, pakuvad kõrgeima resolutsiooniga positsioonitagasisidet täpsete positsioneerimisrakenduste jaoks.
Rõhuandurid jälgivad kambri rõhku, et saada tagasisidet jõu kohta ja diagnostilist teavet, mis võimaldab täiustatud juhtimisstrateegiaid ja seisundi jälgimist.
Elektroonilise juhtimise integreerimine
Servoventiilid tagavad elektriliste käsusignaalide alusel proportsionaalse voolujuhtimise, mis võimaldab täpset kiiruse ja asendi juhtimist programmeeritavate profiilidega.
Elektrooniline rõhujuhtimine kasutab proportsionaalseid surveventiile, et tagada muutuv jõud ja rõhu reguleerimine ühtlase jõudluse tagamiseks.
Integreeritud kontrollerid ühendavad ventiilide juhtimise, andurite töötlemise ja sidefunktsioonid kompaktsetes pakettides, mis lihtsustavad süsteemi integreerimist.
Välibussiühendus võimaldab hajutatud juhtimisarhitektuuri, kus üksikud balloonid suhtlevad otse keskse juhtimissüsteemiga.
Sideprotokollide tugi
Tööstuslik Ethernet-protokollid, sealhulgas EtherNet/IP, Profinet ja EtherCAT, võimaldavad kiiret sidet ja reaalajas juhtimise koordineerimist.
Välisbussiprotokollid, nagu DeviceNet, Profibus ja CANopen, pakuvad töökindlat sidet hajutatud juhtimisrakenduste jaoks.
Juhtmevabad sidevõimalused võimaldavad jälgida ja juhtida mobiilseid või kaugel asuvaid balloone ilma füüsilise kaabliühenduseta.
OPC-UA tugi pakub standardiseeritud kommunikatsiooni Industry 4.0 rakenduste jaoks ja integreerimist ettevõtte süsteemidega.
Diagnostika- ja jälgimisvõimalused
Sisseehitatud diagnostika jälgib tööparameetreid ja komponentide seisundit, et võimaldada ennetavat hooldust ja ennetada ootamatuid rikkeid.
Vibratsiooni jälgimine tuvastab tekkivad mehaanilised probleemid, nagu laagrite kulumine, valesuunaline paigutus või paigaldusprobleemid, enne kui need põhjustavad rikkeid.
Temperatuuri jälgimine kaitseb ülekuumenemise eest ning annab andmeid termilise analüüsi ja süsteemi optimeerimise jaoks.
Kasutuse jälgimine registreerib tsüklite arvu, töötundide arvu ja jõudluse suundumusi hoolduse planeerimiseks ja elutsükli analüüsiks.
Tööstus 4.0 integratsioon
Asjade Interneti-ühenduvus võimaldab kaugseiret ja -juhtimist pilvepõhiste platvormide kaudu, mis pakuvad globaalset juurdepääsu süsteemiteabele.
Andmeanalüüsi võimalused töötlevad operatiivandmeid, et tuvastada optimeerimisvõimalusi ja prognoosida hooldusnõudeid.
Digitaalse kaksiku integreerimine loob füüsiliste silindrite virtuaalsed mudelid simulatsiooniks, optimeerimiseks ja prognoositavaks analüüsiks.
Masinõppe algoritmid analüüsivad tööandmeid, et optimeerida jõudlust ja ennustada komponentide rikkeid enne nende tekkimist.
Ohutussüsteemi integreerimine
Ohutusmärgisega andurid ja juhtimisseadmed vastavad funktsionaalse ohutuse nõuetele rakendustes, mis nõuavad SIL-klassifitseeritud ohutus5 funktsioonid.
Integreeritud ohutusfunktsioonide hulka kuuluvad ohutu seiskamine, ohutu asendi jälgimine ja ohutu kiiruse jälgimine, mis välistavad välised ohutusseadmed.
Redundantsed süsteemid tagavad varusüsteemi toimimise ja järelevalve kriitiliste ohutusrakenduste puhul, mille rike võib põhjustada vigastusi või kahjustusi.
Ohutusalased sideprotokollid tagavad ohutuse seisukohalt olulise teabe usaldusväärse edastamise süsteemi komponentide vahel.
Kokkuvõte
Balloonid töötavad Pascali seaduse elegantse rakendamise kaudu, muutes vedeliku rõhu täpseks lineaarseks liikumiseks sisemiste komponentide, juhtimissüsteemide ja keskkonnakaitsefunktsioonide kooskõlastatud toimimise kaudu, mis võimaldab usaldusväärset automatiseerimist paljudes tööstuslikes rakendustes.
Korduma kippuvad küsimused balloonide töö kohta
Kuidas töötab pneumosilinder?
Pneumosilinder töötab, kasutades suruõhu rõhku, mis mõjub kolvi pinnale, et luua lineaarne jõud vastavalt F = P × A, kusjuures suunaventiilid reguleerivad õhuvoolu, et pikendada või tõmmata kolbi ja selle külge kinnitatud varda.
Milline on silindri tööpõhimõte?
Põhiprintsiip on Pascali seadus, mille kohaselt piiratud vedeliku suhtes rakendatav rõhk kandub võrdselt kõikides suundades edasi, tekitades jõu, kui rõhkude erinevus mõjub silindri sees oleva liikuva kolvi pinnal.
Kuidas toimivad ühetoimelised ja kahetoimelised balloonid erinevalt?
Ühetoimelised balloonid kasutavad õhurõhku ühes suunas, mis on vedru või raskusjõu tagasipöördumisega, samas kui kahetoimelised balloonid kasutavad õhurõhku nii väljapoole kui ka sissepoole liikumiseks, tagades jõuallika liikumise mõlemas suunas.
Millist rolli mängivad tihendid silindri töös?
Tihendid säilitavad silindrikambrite vahelised rõhupiirid, takistavad väliseid lekkeid varda ümber ja blokeerivad saaste sissepääsu, võimaldades usaldusväärseks tööks nõuetekohast rõhkude erinevust ja jõu tekkimist.
Kuidas arvutatakse silindri jõuväljundit?
Arvutage silindri jõud, kasutades F = P × A, kus jõud on võrdne õhurõhu ja efektiivse kolbipinna korrutisega, võttes arvesse varda pindala vähenemist tagasitõmbehetkel ja tõhususe kaotust 10-15%.
Mis põhjustab silindrite ebakorrektset tööd?
Levinumad põhjused on tihendi leke, mis vähendab jõu väljundit, saastumine, mis põhjustab ebastabiilset liikumist, ebaõige mõõtmine rakenduse jaoks, ebapiisav õhutöötlus ja halb hooldus, mis võimaldab komponentide lagunemist.
Kuidas integreeruvad kaasaegsed balloonid automaatikasüsteemidega?
Kaasaegsed balloonid integreeritakse sisseehitatud andurite abil positsioonitagasiside andmiseks, elektrooniliste juhtimisseadmete abil täpseks tööks, sideprotokollide abil võrguühenduseks ning diagnostikavõimaluste abil prognoosiva hoolduse ja Tööstus 4.0 rakenduste jaoks.
Millised keskkonnategurid mõjutavad silindrite tööd?
Keskkonnategurite hulka kuuluvad temperatuur, mis mõjutab vedeliku omadusi ja tihendite toimivust, saastumine, mis põhjustab kulumist ja talitlushäireid, niiskus, mis põhjustab korrosiooni, vibratsioon, mis kiirendab väsimust, ning kõrgus, mis mõjutab rõhkude erinevusi ja toimivust.
Joonealused märkused
-
Lisateave Pascali seaduse ja selle põhilise rolli kohta vedelike mehaanikas. ↩
-
Avastage tööstussilindrites kasutatavad erinevad tihenditüübid ja nende rakendused. ↩
-
Tutvuge erinevate tööstuslike Ethernet-protokollidega, mida kasutatakse automaatikasüsteemide kiireks sidepidamiseks. ↩
-
Mõista suruõhu kvaliteedi rahvusvahelisi standardeid ja nende tähtsust pneumaatikasüsteemides. ↩
-
Mõistab funktsionaalse ohutuse ohutustasemeid (SIL) ja nende olulisust tööstusautomaatika jaoks. ↩
