

Hystereze1 je neviditelný zabiják přesnosti, který číhá v každém proporcionálním pohonném systému – tiše ničí přesnost polohování až o 15%, zatímco inženýři obviňují vše kromě skutečného viníka. Tento jev způsobuje, že pohony si “pamatují” své předchozí polohy, což vytváří nepředvídatelné mrtvé zóny, které mění plynulé ovládání v frustrující nejednotnost. 😠
Hystereze v proporcionálním řízení pohonu způsobuje chyby polohování v rozmezí 2–151 TP3T plného zdvihu v důsledku mechanické vůle, tření těsnění, magnetických účinků a mrtvých pásem regulačního ventilu, což vyžaduje kompenzaci pomocí softwarových algoritmů, mechanického předpětí, zpětné vazby s vyšším rozlišením a správného výběru komponent, aby bylo dosaženo přesnosti polohování pod 11 TP3T.
Před dvěma měsíci jsem spolupracoval s Jennifer, kontrolní inženýrkou v leteckém výrobním závodě v Seattlu, kde přesné montážní roboty neustále minuly cíl o 3 mm – ne náhodně, ale podle předvídatelného vzorce, který jasně naznačoval hysterezi. Po implementaci našich řešení proti hysterezi Bepto se její chyby polohování snížily na méně než 0,5 mm. ✈️
Obsah
- Co přesně je hystereze a proč se vyskytuje v proporcionálních pohonech?
- Jaký vliv má hystereze na různé typy proporcionálních regulačních systémů?
- Které měřicí techniky nejlépe identifikují a kvantifikují efekty hystereze?
- Jaké jsou nejúčinnější metody minimalizace hystereze ve vašem systému?
Co přesně je hystereze a proč se vyskytuje v proporcionálních pohonech?
Porozumění mechanismům hystereze je nezbytné pro dosažení přesného proporcionálního řízení v pneumatických a hydraulických pohonných systémech.
Hystereze nastává, když výstupní poloha pohonu závisí jak na aktuálním vstupním příkazu, tak na předchozí historii polohy, což vytváří různé odezvy na příkazy ke zvýšení a snížení v důsledku mechanické vůle, třecích sil, magnetických účinků a mrtvých pásem regulačního ventilu, které se hromadí v regulačním okruhu.
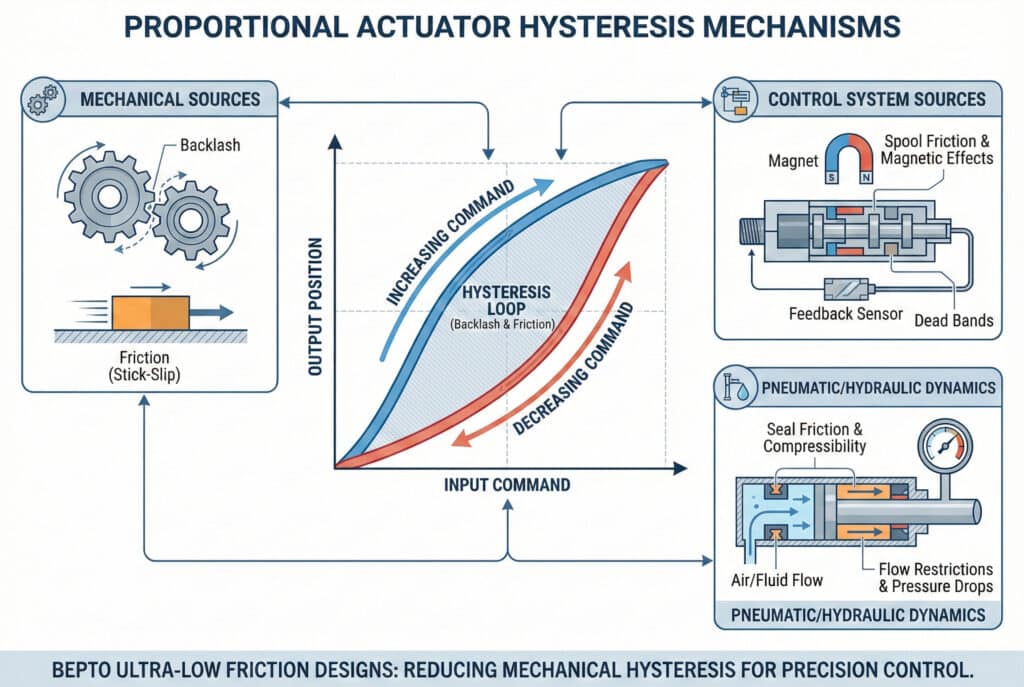
Základní mechanismy hystereze
Mechanické zdroje
Fyzické komponenty významně přispívají k hysterezi systému:
- Zpětná vazba2: Ozubené soukolí, spojky a spoje vytvářejí mrtvé zóny
- Tření: Rozdíly ve statickém a kinetickém tření způsobují chování typu stick-slip.
- Soulad: Pružná deformace v mechanických spojích
- Vzory opotřebení: Opotřebení součástí způsobuje nepravidelné kontaktní plochy
Zdroje řídicího systému
Elektronické a pneumatické ovládací prvky přidávají hysterezi:
| Typ součásti | Typická hystereze | Primární příčina | Strategie zmírnění |
|---|---|---|---|
| Servo ventily | 0.1-0.5% | Tření cívky | Vysokofrekvenční dither |
| Proporcionální ventily3 | 0.5-2% | Magnetická hystereze | Kompenzace zpětné vazby |
| Snímače polohy | 0.05-0.2% | Elektronický šum | Filtrování signálu |
| Zesilovače | 0.1-0.3% | Nastavení mrtvé zóny | Nastavení kalibrace |
Fyzikální původ v pneumatických systémech
Účinky tření těsnění
Pneumatická těsnění vytvářejí významné zdroje hystereze:
- Odtrhové tření: Vyšší síla potřebná k zahájení pohybu
- Tření při běhu: Nižší síla při nepřetržitém pohybu
- chování při skluzu4: Nepravidelný pohyb při nízkých rychlostech
- Závislost na teplotě: Tření se mění s provozní teplotou
Dynamika tlaku
Tlakové účinky pneumatického systému přispívají k hysterezi:
- Stlačitelnost: Stlačení vzduchu vytváří pružinový efekt
- Omezení průtoku: Omezení týkající se ventilů a armatur způsobují zpoždění
- Pokles tlaku: Ztráty v vedení vytvářejí síly závislé na poloze
- Vliv teploty: Tepelná roztažnost ovlivňuje tuhost systému
Ve společnosti Bepto jsme navrhli naše bezpístové válce s těsněními s extrémně nízkým třením a precizně opracovanými vodicími systémy, které snižují mechanickou hysterezi o 60% ve srovnání se standardními konstrukcemi – což je zásadní pro aplikace s vysokou přesností proporcionálního řízení. 🎯
Hystereze závislá na zatížení
Účinky proměnného zatížení
Vnější zatížení významně ovlivňuje charakteristiky hystereze:
- Gravitační zatížení: Změny síly v závislosti na poloze
- Setrvačné zatížení: Požadavky na sílu závislé na zrychlení
- Procesní zatížení: Proměnné vnější síly během provozu
- Třecí zatížení: Změny povrchové kontaktní síly
Interakce dynamických zatížení
Pohybující se náklady vytvářejí složité vzorce hystereze:
- Účinky zrychlení: Setrvačné síly při změnách rychlosti
- Vibrační spojka: Vnější vibrace ovlivňují polohování
- Rezonanční interakce: Vzbudění přirozené frekvence
- Varianty tlumení: Charakteristiky tlumení závislé na zatížení
Jaký vliv má hystereze na různé typy proporcionálních regulačních systémů?
Hysterezní efekty se u různých technologií pohonů a řídicích architektur výrazně liší, což vyžaduje přizpůsobené kompenzační strategie.
Proporcionální systémy s otevřenou smyčkou vykazují chyby hystereze 5–151 TP3T bez možnosti korekce, zatímco systémy s uzavřenou smyčkou mohou hysterezi snížit na 0,5–21 TP3T pomocí kompenzace zpětné vazby, přičemž pokročilé servosystémy dosahují přesnosti pod 0,11 TP3T pomocí vysokorozlišovacích enkodérů a sofistikovaných řídicích algoritmů.
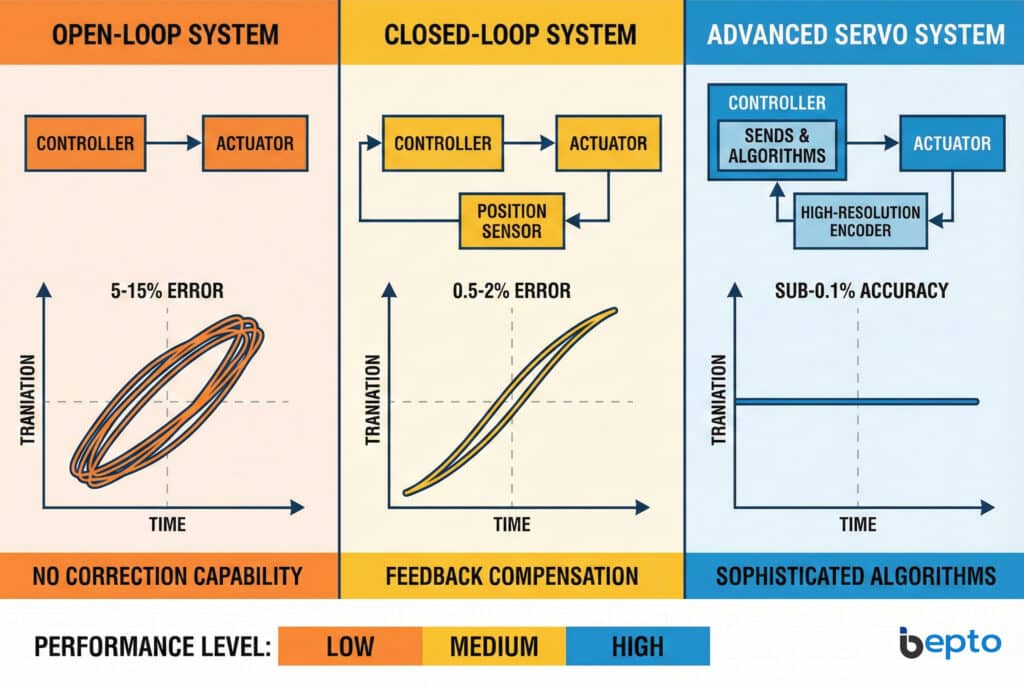
Otevřené regulační systémy
Vlastní omezení
Systémy s otevřenou smyčkou nemohou kompenzovat hysteréze:
- Žádná korekce zpětné vazby: Chyby se hromadí, aniž by byly odhaleny
- Předvídatelné vzorce: Hystereze způsobuje opakované chyby polohování
- Citlivost na teplotu: Výkon se liší v závislosti na provozních podmínkách.
- Závislost na zatížení: Různá zatížení vytvářejí různé vzorce hystereze.
Typické výkonové charakteristiky
Hystereze systému s otevřenou smyčkou se liší podle aplikace:
| Typ aplikace | Rozsah hystereze | Přijatelné použití | Omezení výkonu |
|---|---|---|---|
| Jednoduché polohování | 5-15% | Nekritické úkoly | Špatná opakovatelnost |
| Regulace rychlosti | 3-8% | Hrubá regulace rychlosti | Proměnlivý výkon |
| Kontrola síly | 10-25% | Základní použití síly | Nekonzistentní výstup |
| Vícerozměrné systémy | 8-20% | Jednoduchá automatizace | Kumulativní chyby |
Systémy řízení s uzavřenou smyčkou
Výhody kompenzace zpětné vazby
Systémy s uzavřenou smyčkou mohou aktivně kompenzovat hysterezi:
- Detekce chyb: Kontinuální sledování polohy
- Korekce v reálném čase: Okamžitá reakce na chyby v polohování
- Adaptivní řízení: Učící se algoritmy zlepšují výkon
- Odmítnutí rušení: Kompenzace vnější síly
Účinnost řídicího algoritmu
Různé regulační strategie řeší hysterezi s různou úspěšností:
- PID regulace5: Základní kompenzace, 2-5% zbytková hystereze
- Posuvné řízení: Prediktivní kompenzace, 1-3% reziduální
- Adaptivní řízení: Naučená kompenzace, 0,5–21 TP3T zbytková
- Řízení založené na modelu: Teoretická kompenzace, 0,1–11 TP3T zbytková
Servo řídicí systémy
Pokročilé techniky odměňování
Vysoce výkonné servosystémy využívají sofistikovanou kompenzaci hystereze:
- Mapování hystereze: Charakteristika systému a kompenzační tabulky
- Techniky předpětí: Mechanické předpětí pro eliminaci mrtvých zón
- Dither signály: Vysokofrekvenční excitace k překonání tření
- Prediktivní algoritmy: Predikce hystereze na základě modelu
Michael, robotický inženýr v továrně na přesnou výrobu v Severní Karolíně, implementoval naše doporučené vylepšení servořízení na své montážní lince. Přesnost polohování se zlepšila z ±2,5 mm na ±0,3 mm, čímž se snížil počet vadných výrobků o 75% a ušetřilo se $50 000 měsíčně na nákladech na opravy. 🤖
Výzvy víceosého systému
Kumulativní účinky
Problémy s hysterezí u více pohonů:
- Akumulace chyb: Chyby jednotlivých os se sčítají
- Spojovací efekty: Interakce os vytvářejí složité vzorce
- Problémy se synchronizací: Různé vzorce hystereze způsobují problémy s koordinací
- Složitost kalibrace: Více systémů vyžaduje individuální nastavení
Strategie koordinace
Pokročilé víceosé systémy využívají specializované techniky:
- Ovládání master-slave: Jedna osa vede, ostatní následují
- Kompenzace křížového vazebního jevu: Korekce interakce os
- Synchronizované polohování: Koordinované pohybové profily
- Globální optimalizace: Optimalizace výkonu celého systému
Které měřicí techniky nejlépe identifikují a kvantifikují efekty hystereze?
Přesné měření a charakterizace hystereze umožňuje vývoj účinné kompenzační strategie a optimalizaci systému.
Měření hystereze vyžaduje obousměrné polohovací testy s vysokým rozlišením kodérů, zaznamenávání vztahů mezi polohou a příkazy v průběhu kompletních cyklů, analýzu šířky smyčky a asymetrických vzorců a dokumentování závislostí na teplotě a zatížení za účelem vytvoření komplexních kompenzačních map pro optimální výkon řízení.
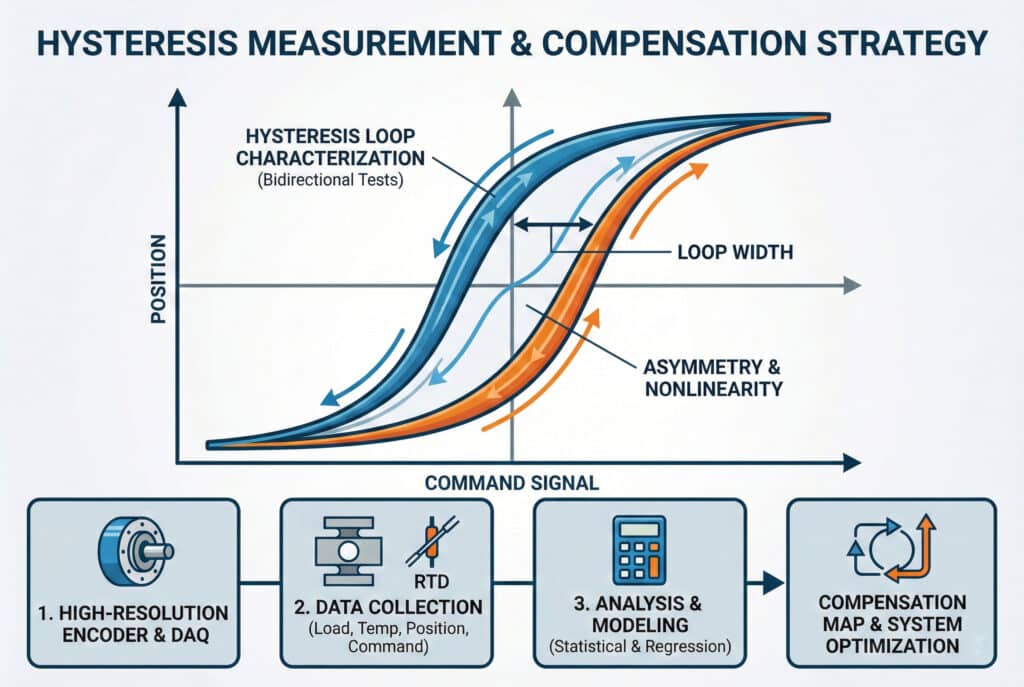
Standardní protokoly měření
Obousměrné testy polohování
Komplexní charakterizace hystereze vyžaduje systematické testování:
- Plné zdvihové cykly: Kompletní sekvence vysunutí a zasunutí
- Více rychlostí: Různé profily rychlosti pro identifikaci závislosti na rychlosti
- Změny zatížení: Různé vnější zatížení pro mapování účinků zatížení
- Rozsahy teplot: Posouzení vlivu provozní teploty
Požadavky na shromažďování údajů
Přesné měření hystereze vyžaduje vysoce kvalitní přístroje:
| Parametr měření | Požadované rozlišení | Typické vybavení | Cíl přesnosti |
|---|---|---|---|
| Zpětná vazba k poloze | 0,01% zdvihu | Lineární snímač | ±0,0051 TP3T |
| Řídicí signál | Minimálně 12 bitů | DAQ systém | ±0,1% |
| Měření zatížení | 1% jmenovité síly | Zatěžovací buňka | ±0,5% |
| Teplota | ±1°C | RTD senzor | ±0.5°C |
Techniky analýzy
Charakteristika hysterezní smyčky
Matematická analýza odhaluje charakteristiky hystereze:
- Šířka smyčky: Maximální rozdíl polohy při stejném příkazu
- Asymetrie: Směrová odchylka v chybách polohování
- Nelinearita: Odchylka od ideální lineární odezvy
- Opakovatelnost: Konzistence napříč několika cykly
Metody statistické analýzy
Pokročilé analytické techniky kvantifikují efekty hystereze:
- Směrodatná odchylka: Měření opakovatelnosti polohování
- Korelační analýza: Síla vztahu mezi vstupy a výstupy
- Frekvenční analýza: Dynamické odezvy
- Regresní analýza: Vývoj matematického modelu
Monitorovací systémy v reálném čase
Kontinuální sledování hystereze
Výrobní systémy těží z průběžného monitorování hystereze:
- Vestavěné senzory: Vestavěné systémy zpětné vazby polohy
- Záznam dat: Kontinuální záznam výkonu
- Analýza trendů: Sledování dlouhodobého poklesu výkonu
- Prediktivní údržba: Včasné varování před opotřebením součástí
Naše diagnostické systémy Bepto zahrnují monitorování hystereze v reálném čase, které upozorní operátory, když chyby polohování překročí prahové hodnoty 0,5%, což umožňuje provádět proaktivní údržbu dříve, než se přesnost sníží na nepřijatelnou úroveň. 📊
Posuzování vlivů na životní prostředí
Vliv teploty
Teplota významně ovlivňuje charakteristiky hystereze:
- Tepelná roztažnost: Mechanické změny rozměrů
- Změny viskozity: Změny vlastností tekutin
- Vlastnosti materiálu: Teplotní závislost modulu pružnosti
- Výkonnost těsnění: Změny koeficientu tření
Analýza závislosti na zatížení
Vnější zatížení vytváří složité hysterezní vzorce:
- Statické zatížení: Účinky konstantní síly na polohování
- Dynamické zatížení: Nerovnoměrná síla nárazu během pohybu
- Setrvačné účinky: Chyby polohování závislé na zrychlení
- Rozdíly v tření: Vliv stavu povrchu na výkon
Jaké jsou nejúčinnější metody minimalizace hystereze ve vašem systému?
Implementací komplexních strategií pro snížení hystereze lze dosáhnout přesnosti polohování pod 1% v náročných aplikacích proporcionálního řízení.
Účinná minimalizace hystereze kombinuje mechanická vylepšení, včetně komponentů s nízkým třením a eliminace vůle, vylepšení řídicího systému s kompenzací předběžného řízení a adaptivními algoritmy, plus řízení prostředí pro stabilitu teploty a zatížení, což obvykle snižuje hysterezi z 5-15% na méně než 1% plného rozsahu.
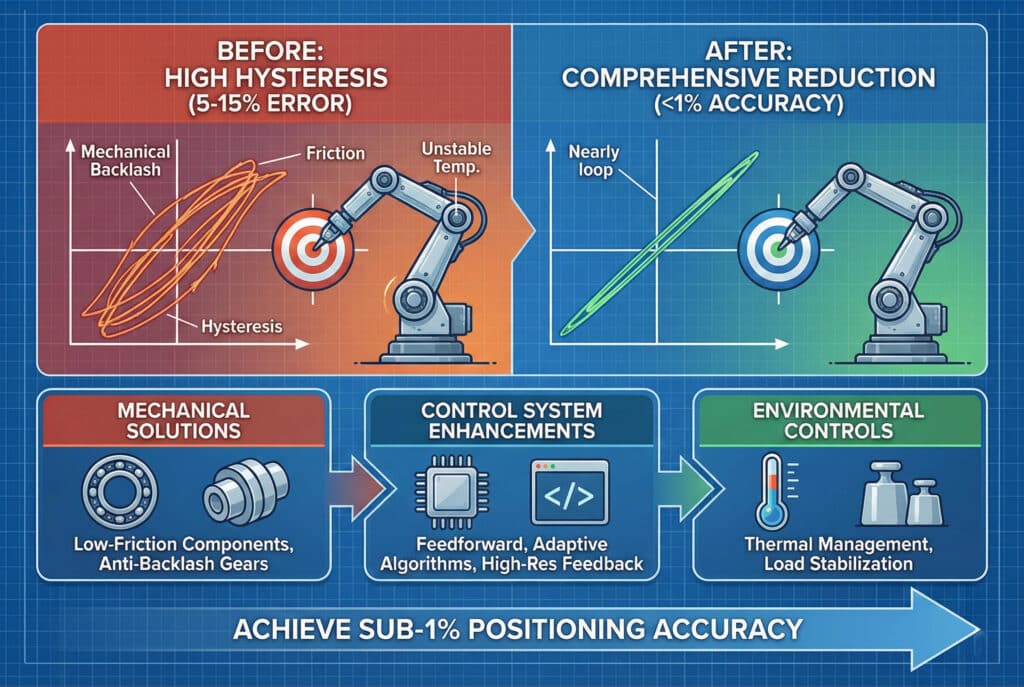
Mechanická řešení
Výběr a návrh komponentů
Vyberte komponenty speciálně navržené pro nízkou hysterezi:
- Přesná ložiska: Vysoce kvalitní lineární vedení s minimální vůlí
- Těsnění s nízkým třením: Pokročilé materiály a konstrukce těsnění
- Pevné spojky: Odstraňte zdroje mechanické vůle
- Předinstalované systémy: Mechanické předpětí pro eliminaci mrtvých zón
Vylepšení architektury systému
Navrhujte mechanické systémy tak, aby minimalizovaly zdroje hystereze:
| Funkce designu | Snížení hystereze | Náklady na implementaci | Dopad na údržbu |
|---|---|---|---|
| Přímý pohon | 80-90% | Vysoká | Nízká |
| Předinstalované průvodce | 60-70% | Střední | Střední |
| Přesné spojky | 40-50% | Nízká | Nízká |
| Převody proti zpětnému rázu | 70-80% | Střední | Vysoká |
Vylepšení řídicího systému
Techniky kompenzace softwaru
Pokročilé řídicí algoritmy mohou výrazně snížit hysteréza efekty:
- Mapování hystereze: Vyhledávací tabulky pro korekci polohy
- Posuvné řízení: Prediktivní kompenzace na základě směru příkazu
- Adaptivní algoritmy: Samoučící se kompenzace hystereze
- Řízení založené na modelu: Predikce hystereze na základě fyzikálních zákonitostí
Vylepšení systému zpětné vazby
Vylepšené systémy zpětné vazby umožňují lepší kompenzaci hystereze:
- Kodéry s vyšším rozlišením: Zlepšená přesnost měření polohy
- Více senzorů zpětné vazby: Redundantní měření polohy
- Zpětná vazba rychlosti: Algoritmy odměňování založené na sazbách
- Silová zpětná vazba: Kompenzace hystereze závislá na zatížení
Strategie kontroly životního prostředí
Řízení teploty
Stabilní provozní teploty snižují kolísání hystereze:
- Tepelná izolace: Chraňte pohony před teplotními výkyvy
- Aktivní chlazení: Udržujte stálé provozní teploty
- Kompenzace teploty: Softwarová korekce teplotních vlivů
- Tepelná předúprava: Umožněte systémům dosáhnout tepelné rovnováhy
Stabilizace nákladu
Konzistentní podmínky zatížení minimalizují variace hystereze:
- Izolace zátěže: Oddělit vnější rušivé vlivy
- Vyvažování: Snížení účinků gravitačního zatížení
- Tlumení vibrací: Minimalizujte dynamické kolísání zatížení
- Optimalizace procesů: Snížení proměnných vnějších sil
Sarah, procesní inženýrka ve farmaceutickém balírenském závodě v Coloradu, zavedla náš komplexní program snižování hystereze. Přesnost počítání tablet se zlepšila z 98,51 TP3T na 99,81 TP3T, čímž byly splněny požadavky FDA a zároveň se snížil odpad o 1 TP4T25 000 měsíčně. 💊
Pokročilé techniky odměňování
Aplikace signálu dither
Vysokofrekvenční buzení může překonat hysterézi způsobenou třením:
- Výběr frekvence: Vyberte frekvence nad šířkou pásma systému
- Optimalizace amplitudy: Vyvážená účinnost a stabilita systému
- Návrh vlnové formy: Sinusové, trojúhelníkové nebo náhodné signály
- Metody implementace: Hardwarová nebo softwarová generace
Metody prediktivního řízení
Modelové přístupy poskytují vynikající kompenzaci hystereze:
- Identifikace systému: Vývoj matematického modelu
- Kalmanovo filtrování: Odhad optimálního stavu
- Modelové prediktivní řízení: Optimalizace budoucího stavu
- Adaptivní modelování: Aktualizace parametrů modelu v reálném čase
Údržba a kalibrace
Pravidelné kalibrační postupy
Systematická kalibrace udržuje nízkou hysterezi:
- Periodické mapování hystereze: Zdokumentujte změny výkonu
- Kontrola komponentů: Identifikujte opotřebení související s degradací
- Údržba mazání: Udržujte optimální úroveň tření
- Ověření vyrovnání: Zajistěte mechanickou přesnost
Strategie prediktivní údržby
Proaktivní údržba zabraňuje degradaci hystereze:
- Trend výkonu: Sledujte změny hystereze v čase
- Sledování životnosti komponent: Výměna součástí před poruchou
- Sledování stavu: Průběžné hodnocení stavu systému
- Preventivní výměna: Naplánujte údržbu na základě využití
V společnosti Bepto naše balíčky pro snížení hystereze obvykle dosahují zlepšení přesnosti polohování o 70–851 TP3T, přičemž mnoho zákazníků uvádí úroveň hystereze pod 0,51 TP3T ve svých nejnáročnějších aplikacích – výkon, který se přímo promítá do vyšší kvality produktů a snížení množství odpadu. 🎯
Závěr
Porozumění a ovládání hystereze je nezbytné pro dosažení přesného proporcionálního řízení pohonu, což vyžaduje systematické měření, cílenou kompenzaci a průběžnou údržbu pro optimální výkon.
Často kladené otázky týkající se hystereze v proporcionálním řízení pohonu
Otázka: Co se považuje za přijatelnou hysterezi v proporcionálních pohonných systémech?
Přijatelná hystereze závisí na požadavcích aplikace: obecná automatizace toleruje 2–51 TP3T, přesná montáž vyžaduje méně než 11 TP3T a ultra přesné aplikace vyžadují úroveň hystereze nižší než 0,51 TP3T. Naše systémy Bepto při správné implementaci obvykle dosahují hystereze 0,3–0,81 TP3T.
Otázka: Může softwarová kompenzace zcela eliminovat mechanickou hysterezi?
Softwarová kompenzace může snížit hysterezi o 60–80%, ale nemůže zcela eliminovat mechanické zdroje, jako je vůle a tření. Kombinace mechanických vylepšení a softwarové kompenzace přináší nejlepší výsledky, obvykle s celkovou hysterezí systému pod 1%.
Otázka: Jak často bych měl provádět rekalibraci svého proporcionálního regulačního systému pro hysterezi?
Frekvence kalibrace závisí na intenzitě používání a požadavcích na přesnost: vysoce přesné systémy vyžadují měsíční kalibraci, běžné aplikace vyžadují čtvrtletní kontroly a systémy s nízkou přesností mohou používat roční kalibrační plány s průběžným sledováním výkonu.
Otázka: Jaký je rozdíl mezi hysterezí a vůlí v pohonných systémech?
Zpětný ráz je mechanická vůle ve spojích a převodech, zatímco hystereze zahrnuje všechny účinky závislé na poloze, včetně tření, magnetických účinků a mrtvých pásem řídicího systému. Zpětný ráz je jednou ze složek celkové hystereze systému.
Otázka: Jak poznám, že moje problémy s polohováním způsobuje hystereze?
Hystereze vytváří charakteristické vzorce: konzistentní chyby polohování, které závisí na směru přiblížení, rozdílná přesnost při pohybu nahoru a dolů a opakovatelné vzorce chyb. Testy obousměrného polohování odhalují hysterezní smyčky, které potvrzují diagnózu.
-
Seznamte se s fyzikálními principy hystereze a jejím vlivem na přesnost v různých technických oborech. ↩
-
Porozumět příčinám a technickým řešením pro odstranění vůle v mechanických spojích. ↩
-
Prozkoumejte vnitřní mechaniku a principy fungování proporcionálních pneumatických regulačních ventilů. ↩
-
Objevte mechanismus jevu stick-slip a jeho vliv na pohyb pohonu při nízkých rychlostech. ↩
-
Získejte hlubší porozumění teorii PID regulace a jejímu použití v průmyslové automatizaci. ↩
