

Standardsed kahepositsioonilised silindrid piiravad automatiseerimise paindlikkust, sundides insenere kasutama keerulisi mehaanilisi süsteeme või kalleid servo lahendused1, suurendades kulusid 200-400% võrra ja muutes hoolduse keerukamaks. Mitme positsiooniga silindrid saavutavad vahepeatused mehaaniliste pidurite, pneumaatilise järjestuse või elektrooniliste positsioonikontrollisüsteemide abil, mis paigutavad kolvi täpselt etteantud positsioonidesse piki löögi pikkust, võimaldades keerukaid automatiseerimisjärjekordasid ühe ajamiga. Eelmisel nädalal aitasin Wisconsinist pärit pakendiinseneri Marcust, kelle sorteerimissüsteem vajas kolme erinevat positsiooni, kuid oli hädas mitme silindri paigutuse keerukuse ja maksumusega. 🎯
Sisukord
- Millised on eri tüüpi mitmepositsioonilised balloonitehnoloogiad?
- Kuidas tagavad mehaanilised detentsüsteemid usaldusväärse positsioonikontrolli?
- Miks on Bepto mitme positsiooniga balloonid nutikas valik keerulise automatiseerimise jaoks?
Millised on eri tüüpi mitmepositsioonilised balloonitehnoloogiad?
Erinevate mitme positsiooniga silindrite tehnoloogiate tundmine aitab inseneridel valida optimaalse lahenduse nende konkreetsete automatiseerimisnõuete ja täpsusvajaduste jaoks.
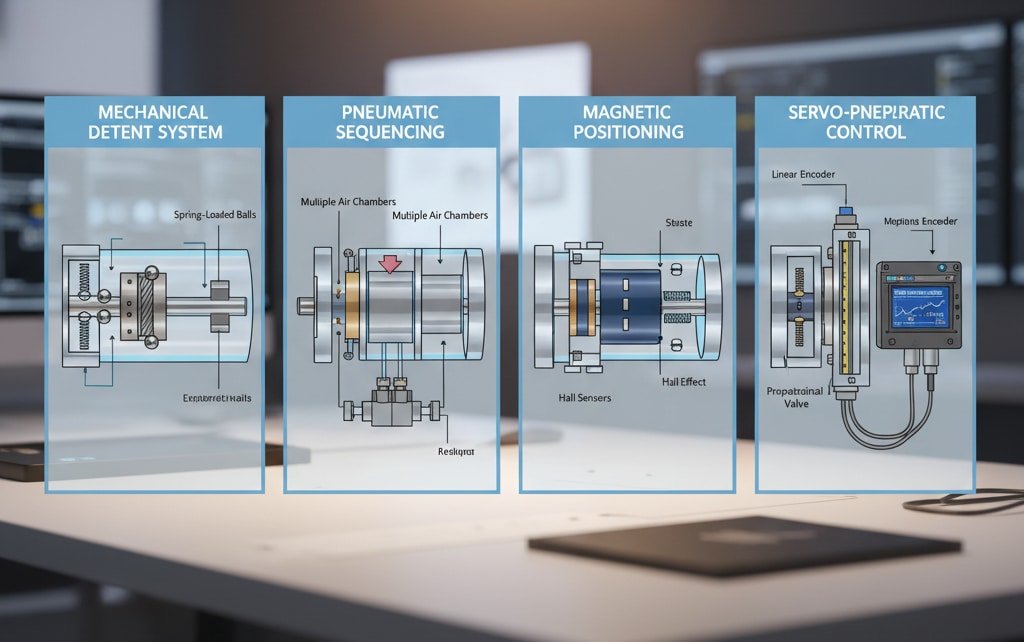
Mitme positsiooniga silindrid kasutavad mehaanilisi pidurisüsteeme vedruga koormatud kuulidega, pneumaatilist järjestust mitme õhukambriga, magnetilist positsioneerimist hall-anduritega või servopneumaatilist juhtimist elektroonilise tagasisidega, et saavutada täpne vahepeatus silindri liikumisteel.
Mehaanilised detentimissüsteemid
Vedruga koormatud pallidetailid:
- Täpselt töödeldud sooned kolbvarrasesse
- Vedruga koormatud kuulid haakuvad detentide positsioonidesse
- Mehhaaniline ülekäiguvõime hädaolukorras kasutamiseks
- Asendi hoidmiseks ei ole vaja välist energiat
Nokk-kinnitusdetektorid:
- Pöörlev nukkmehhanism kontrollib asendi valikut
- Mitu piduripositsiooni ühe pöörde kohta
- Suur hoidevõime
- Sobib rasketele rakendustele
Kiil-tüüpi fikseerijad:
- Koonilised kiilelemendid tagavad positsioneerimise
- Iselukustuv konstruktsioon takistab triivimist
- Kõrge täpsus ja korratavus
- Kompaktne disain piiratud ruumiga rakenduste jaoks
Pneumaatilised järjestussüsteemid
Mitme kambriga disain:
- Eraldi õhukambrid iga positsiooni jaoks
- Järjestikuklapi juhtimine positsiooni valimiseks
- Sõltumatu rõhu reguleerimine kambri kohta
- Sujuvad üleminekud positsioonide vahel
Pilootoperatsioonide järjestamine:
- Väikesed pilootsilindrid kontrollivad peasilindrite asendeid
- Vähendatud õhutarbimine võrreldes mitme kambriga
- Kiirem reageerimisaeg
- Madalamad kulud kui täielikud mitmekambrilised süsteemid
Elektrooniline positsioonikontroll
| Tehnoloogia tüüp | Asukoha täpsus | Reageerimisaeg | Nõuded elektrienergiale | Tüüpilised rakendused |
|---|---|---|---|---|
| Mehaaniline detent | ±0,1mm | 0,5-1,0 sekundit | Puudub | Kokkupanek, sorteerimine |
| Pneumaatiline järjestus | ±0,5 mm | 0,3-0,8 sekundit | Suruõhk | Materjalide käitlemine |
| Magnetiline asend | ±0.05mm | 0,2-0,5 sekundit | 24V DC | Täppismonteerimine |
| Servopneumaatiline | ±0,01mm | 0,1-0,3 sekundit | 24V DC + tagasiside | Kõrge täpsusega rakendused |
Magnetiline positsioneerimise tehnoloogia
- Mittekontaktne asukoha tuvastamine
- Mitu magnetilist sihtmärki kolvi peal
- Elektrooniline positsiooni kontrollimine
- Programmeeritavad asukohapunktid
Reed-lülitussüsteemid:
- Lihtne sisse/välja asendi tuvastamine
- Mitu lülitit piki silindri pikkust
- Kulutõhus põhipositsioneerimiseks
- Usaldusväärne karmides keskkondades
Servo-pneumaatiline integratsioon
Asendi tagasiside süsteemid:
- Lineaarkoodrid3 anda täpseid asukohaandmeid
- Täpsuse tagamiseks suletud ahelaga juhtimine
- Programmeeritavad vahepositsioonid
- Dünaamilise asendi reguleerimise võime
Proportsionaalne ventiilide juhtimine:
- Muutuv voolu reguleerimine sujuvaks positsioneerimiseks
- Elektrooniline rõhu reguleerimine
- Mitme positsiooni programmeerimine
- Integreerumine PLC süsteemid4
Marcuse pakendirakendus näitas suurepäraselt vajadust mitme positsiooniga tehnoloogia järele. Tema süsteem vajas kolme täpset positsiooni: toote pealevõtmine (25 mm), kontrolljaam (75 mm) ja lõplik paigutamine (125 mm). Traditsioonilised lahendused oleksid nõudnud kolme eraldi silindrit või keerulisi mehaanilisi ühendusi. Meie Bepto mehaaniline fikseerimissilinder pakkus kõiki kolme positsiooni ühes usaldusväärses seadmes! 📦
Kuidas tagavad mehaanilised detentsüsteemid usaldusväärse positsioonikontrolli?
Mehaanilised fikseerimissüsteemid pakuvad tugevat, võimsusest sõltumatut positsioneerimist tänu täpselt väljatöötatud mehaanilistele liideseile, mis lukustavad silindri etteantud positsioonidesse.
Mehaanilised fikseerimissüsteemid kasutavad vedruga koormatud palle või kiile, mis haakuvad silindrivardas olevate täpsusega töödeldud soonte või sisselõikega, tagades positiivse mehaanilise lukustuse vaheasendites suure korratavuse ja pidamisjõuga, ilma et oleks vaja välist energiat või keerulisi juhtimisseadmeid.
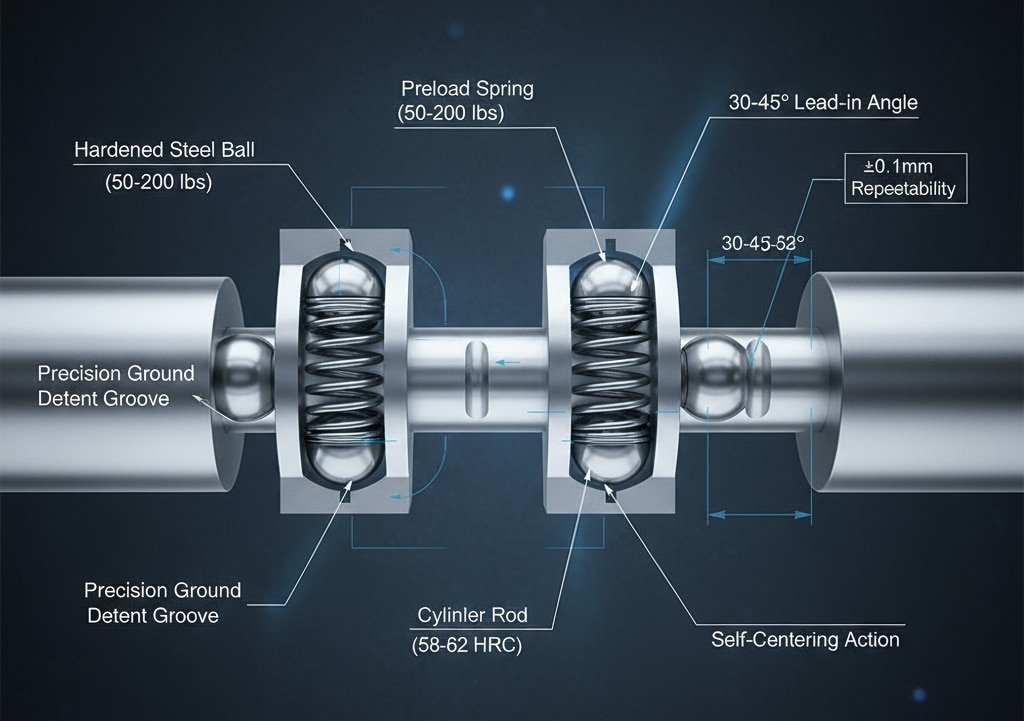
Detentmehhanismide konstruktsioon
Ball Detent Configuration:
- Karastatud teraskuulid (tavaliselt 6-12 mm läbimõõduga)
- Vedru eelkoormuse jõud 50-200 naela
- Täpselt lihvitud pidurisooned
- Isekeskendav tegevus korduvust silmas pidades
Kihlumisgeomeetria:
- 30-45-kraadine sisselaske nurk sujuvaks sisselülitamiseks
- Täieliku raadiusega soonprofiil maksimaalse kontakti saavutamiseks
- Karastatud pinnad (58-62 HRC) kulumiskindluse tagamiseks
- Usaldusväärse töö tagamiseks vajalikud vahekaugused
Asendi täpsus ja korratavus
Mehhaaniline täpsus:
- soonte töötlemise tolerants ±0.025mm
- Kuuli läbimõõdu tolerants ±0.0025mm
- Vedru jõu järjepidevus ±5%
- Üldine asendi korratavus ±0,1 mm
Täpsust mõjutavad tegurid:
- Resti komponentide tootmistolerantsid
- Kulumismustrid pikema aja jooksul
- Koormuse varieerumine, mis mõjutab sisselülitusjõudu
- Temperatuuri mõju materjali mõõtmetele
Jõu analüüs ja hoidevõime
Võitlusjõud:
- Vedru eelpinge määrab sisselülitusjõu
- Palli kokkupuutepindala mõjutab pinge jaotumist
- soonte geomeetria mõjutab pidamisvõimet
- Ületusjõud on tavaliselt 2-3 korda suurem kui sisselülitusjõud
Hoiujõu arvutused:
- Aksiaalne hoidev jõud = vedrujõud × sin(soonenurk)
- Ohutustegur tavaliselt 3:1 dünaamiliste koormuste puhul
- Temperatuurikompensatsioon vedrujõu muutumise korral
- Laadimisvõime kontrollimine katsetamise teel
Konstruktsioonivariandid ja konfiguratsioonid
| Detent tüüp | Saadaval olevad ametikohad | Hoidev jõud | Ülesandmise jõud | Parimad rakendused |
|---|---|---|---|---|
| Ball Detent | 2-8 positsioonid | 100-500 naela | 200-1000 naela | Üldine automatiseerimine |
| Kiil lukk | 2-4 positsiooni | 500-2000 naela | 1000-4000 naela | Raskeveokite rakendused |
| Cam Detent | 3-12 positsioonid | 200-800 naela | 400-1600 naela | Mitmeastmelised protsessid |
| Magnetiline detent | 2-6 positsioonid | 50-300 naela | 100-600 naela | Puhas keskkond |
Paigaldamise ja reguleerimise protseduurid
Esialgne seadistamine:
- Kontrollida piduripositsiooni vastavust rakenduse nõuetele.
- Reguleerige vedru eelpinget, et saavutada õige sisselülitusjõud
- Katse avariiülesande jõu testimine
- Dokumendi positsiooni seaded hoolduse jaoks
Hooldusnõuded:
- Pidurisoonte kulumise perioodiline kontroll
- Kevadine jõu kontrollimine igal aastal
- Liikuvate osade määrimine
- Kulunud pidurielementide asendamine
Tüüpiliste probleemide lahendamine
Asendi triivimine:
- Kontrollida pidurisoonte kulumismustreid
- Kontrollida vedru jõu spetsifikatsioonid
- Kontrollida detentmehhanismi saastumist
- Hinnake koormustingimusi vs. hoidmisjõudu
Kihlveoprobleemid:
- Kontrollida palli või kiilu kulumist
- Kontrollida soonte pinna viimistlust
- Kontrollida nõuetekohast määrimist
- Hinnata komponentide vahelist vastavust
Keskkonnaalased kaalutlused
Temperatuuri mõju:
- Vedru jõu muutumine temperatuuri järgi
- Resti komponentide soojuspaisumine
- Materjali valik temperatuurivahemiku jaoks
- Kompensatsioonimeetodid äärmuslikes tingimustes
Saastumiskaitse:
- Hermeetilised detentmehhanismid määrdunud keskkondade jaoks
- Filtreerimisnõuded õhuvarustusele
- Väliskomponentide kaitsekatted
- Hoolduse puhastusprotseduurid
Jennifer, Põhja-Carolinast pärit masina projekteerija, vajas oma keevitusseadme jaoks usaldusväärset positsioneerimist, mis töötab raskes tootmiskeskkonnas. Tavalised pneumaatilised positsioneerimissüsteemid ebaõnnestusid saastumise ja elektrikatkestuste tõttu. Meie mehaaniline fikseerimissüsteem pakkus järjepidevat positsioneerimist sõltumata voolu seisundist ja osutus immuunseks keevituskeskkonna suhtes. elektromagnetilised häired5! ⚡
Miks on Bepto mitme positsiooniga balloonid nutikas valik keerulise automatiseerimise jaoks?
Meie täiustatud mitme positsiooniga silindrite tehnoloogia ühendab endas täppistehnika, paindlikud konfiguratsioonivõimalused ja kuluefektiivsed lahendused, et lihtsustada keerulisi automatiseerimisülesandeid.
Bepto mitme positsiooniga silindritel on täppistöödeldud detentsioonisüsteemid, kohandatavad positsioonikonfiguratsioonid, tööstuskeskkonna jaoks vastupidav konstruktsioon ja ulatuslik tehniline tugi, mis tagavad usaldusväärse mitme positsiooniga töö 60% odavamalt kui servoalternatiivid, säilitades samal ajal suurepärase täpsuse ja vastupidavuse.
Täiustatud tehnilised omadused
Täppistootmine:
- CNC-töödeldud detent sooned ±0,01mm tolerantsiga
- Karastatud ja lihvitud piduripinnad (60+ HRC)
- Täpselt sobitatud vedrukogumid
- Kvaliteedi testitud positsiooni korratavus
Kohandamisvõimalused:
- Saadaval on 2 kuni 8 positsiooni konfiguratsioonid
- Kohandatud positsioonide vahekaugus 10mm kuni 500mm
- Muutuv hoidmisjõud 50 kuni 2000 naela
- Spetsiaalsed materjalid karmide keskkondade jaoks
Konfiguratsioonivõimalused ja paindlikkus
Standardkonfiguratsioonid:
- 3-positsioonilised silindrid (kõige populaarsemad)
- Võrdne vahekaugus või kohandatud positsiooniintervallid
- Mitmesugused läbimõõdud alates 1,5″ kuni 8″.
- Löögi pikkus kuni 60 tolli
Kohandatud lahendused:
- Asümmeetriline positsioonide vahekaugus
- Muutuvad pidurdusjõud positsiooni kohta
- Spetsiaalsed paigalduskonfiguratsioonid
- Integreeritud andurid ja tagasisidesüsteemid
Tulemuslikkuse spetsifikatsioonid
| Silindri puur | Maksimaalsed positsioonid | Asukoha täpsus | Hoidev jõud | Töörõhk |
|---|---|---|---|---|
| 1.5″ (40mm) | 6 positsiooni | ±0,1mm | 200 naela | 80-150 PSI |
| 2.5″ (63mm) | 8 positsiooni | ±0,1mm | 400 naela | 80-150 PSI |
| 4″ (100mm) | 6 positsiooni | ±0.05mm | 800 naela | 80-150 PSI |
| 6″ (160mm) | 4 positsiooni | ±0.05mm | 1500 naela | 80-150 PSI |
Kvaliteedi ja usaldusväärsuse eelised
Katsestandardid:
- 5 miljoni elutsükli testimine
- Asendi korratavuse kontrollimine
- Hoiujõu valideerimine
- Keskkonnakindluskatsed
Usaldusväärsuse omadused:
- Plommitud pidurdusmehhanismid
- Korrosioonikindlad materjalid
- Temperatuuristabiilsed vedrud
- Saastekindel disain
Kulutõhususe analüüs
Esialgne investeeringu kokkuhoid:
- 60% odavam kui servopneumaatilised süsteemid
- 40% vähem kui mitme silindri paigutus
- Vähendatud paigaldamise keerukus
- Madalamad kontrollsüsteemi nõuded
Tegevuskulude eelised:
- Asendi hoidmiseks ei ole vaja välist energiat
- Minimaalsed hooldusnõuded
- Vähendatud varuosade varu
- Madalam energiatarbimine
Tehniline tugi ja teenused
Tehniline abi:
- Rakendusanalüüs ja silindrite mõõtmine
- Kohandatud positsiooni konfiguratsiooni disain
- Paigaldamise ja seadistamise juhised
- Veaotsingu ja optimeerimise tugi
Dokumentatsioon ja koolitus:
- Põhjalikud paigaldusjuhendid
- Hooldusprotseduuride dokumentatsioon
- Tehnilised koolitusprogrammid
- Veebipõhised tugiressursid
Integratsioon ja ühilduvus
Juhtimissüsteemi integreerimine:
- Ühildub standardsete pneumaatiliste ventiilidega
- Valikulised asukoha tagasiside andurid
- PLC integreerimise võimalused
- Standardsed tööstuslikud paigaldusliidesed
Tagantjärele paigaldatavad rakendused:
- Olemasolevate silindrite otsene asendamine
- Paigaldamise ühilduvus suuremate kaubamärkidega
- Portide keermevõimalused (NPT, G, M5)
- Saadaval on kohandatud adapterlahendused
Edulood ja rakendused
Tõestatud rakendused:
- Paigaldussüsteemid montaažiliinil
- Materjalide käitlemise seadmed
- Pakendimasinate automatiseerimine
- Testimis- ja kontrolliseadmed
Klientide tulemused:
- 95% positsioneerimissüsteemi keerukuse vähendamine
- 80% tsükli kestuse paranemine
- 70% hooldusnõuete vähenemine
- 99,9% positsiooni korratavuse saavutamine
Meie mitme positsiooniga silindrite tehnoloogia on üle 800 kliendi jaoks üle maailma revolutsiooniliselt muutnud automaatikat, kõrvaldades vajaduse keeruliste mehaaniliste süsteemide järele, pakkudes samal ajal täpset positsioneerimist pneumosilindrite kuludega. Me ei tooda lihtsalt silindreid - me projekteerime terviklikke positsioneerimislahendusi, mis lihtsustavad automatiseerimist ja parandavad tootlikkust! 🚀
Kokkuvõte
Mitme positsiooniga silindrid välistavad keerulised mehaanilised süsteemid ja kallid servolahendused, pakkudes täpset vahepealset positsioneerimist lihtsa pneumaatilise juhtimise ja usaldusväärse mehaanilise tööga.
Korduma kippuvad küsimused mitme positsiooniga silindrite kohta
K: Mitu asendit saab üks mitmeasendiline silinder pakkuda?
Bepto mitme positsiooniga silindrid võivad pakkuda 2 kuni 8 erinevat positsiooni sõltuvalt ava suurusest ja löögi pikkusest. Enamik rakendusi kasutab 3-4 positsiooni, et saavutada optimaalne tasakaal funktsionaalsuse ja töökindluse vahel, kuid erivajaduste jaoks on saadaval ka kohandatud konfiguratsioonid.
K: Mis juhtub, kui silinder jääb positsioonide vahel kinni?
Meie mehaanilised fikseerimissüsteemid sisaldavad ülekäiguvõimalust, mis võimaldab silindri käsitsi või pneumaatilise jõuga järgmisesse asendisse liigutada. Vedruga koormatud pidurikonstruktsioon juhib kolvi töö ajal loomulikult lähimasse stabiilsesse asendisse.
K: Kas mitme positsiooniga silindrid saavad hakkama samade koormustega kui tavalised silindrid?
Jah, Bepto mitme positsiooniga silindrid säilitavad täieliku jõuvõime kõigis positsioonides. Pidurdusmehhanism lisab hoidejõudu, mitte ei vähenda seda, kusjuures hoidejõud on sõltuvalt konfiguratsioonist vahemikus 200 kuni 2000 naela.
K: Kuidas programmeerida erinevaid positsioone oma olemasoleva juhtimissüsteemiga?
Mitme positsiooniga silindrid töötavad koos standardsete pneumaatiliste ventiilide ja ajastusjuhtimisega. Iga positsioon nõuab kindlat klapijärjekorda ja ajastust. Pakume üksikasjalikke programmeerimisjuhiseid ja saame aidata juhtimissüsteemi integreerimisel teie konkreetse rakenduse jaoks.
K: Milliseid hooldustöid on vaja mitme positsiooniga silindri lukustussüsteemide puhul?
Hooldus on minimaalne - igal aastal kontrollitakse pidurisüsteemi sisselülitumist, määritakse perioodiliselt liikuvaid osi ja kontrollitakse asendi täpsust. Mehaaniline konstruktsioon välistab elektroonilised komponendid, mis vajavad sagedast kalibreerimist või asendamist.
-
Uurige, kuidas servosüsteemid tagavad suure täpsusega liikumise juhtimise tööstusautomaatikas. ↩
-
Õppige tundma Halliefektandurite põhimõtteid ja nende kasutamist kontaktivaba positsioneerimisel. ↩
-
Avastage, kuidas lineaarkoodrid tagavad täpse asukoha tagasiside suletud ahelaga juhtimissüsteemides. ↩
-
mõista programmeeritavate loogikakontrollerite (PLC) rolli tööstusprotsesside juhtimisel ja automatiseerimisel. ↩
-
Lugege elektromagnetiliste häirete (EMI) põhjustest ja mõjudest tööstuskeskkonnas. ↩
