

Apakah perlengkapan pneumatik Anda menyebabkan ketidaksejajaran, masalah kualitas yang disebabkan oleh getaran, atau waktu pergantian yang berlebihan? Masalah umum ini sering kali berasal dari pemilihan perlengkapan yang tidak tepat, yang menyebabkan penundaan produksi, penolakan kualitas, dan peningkatan biaya perawatan. Memilih perlengkapan pneumatik yang tepat dapat segera menyelesaikan masalah kritis ini.
Perlengkapan pneumatik yang ideal harus menyediakan sinkronisasi multi-rahang yang tepat, peredam getaran yang efektif, dan kompatibilitas penggantian cepat dengan sistem yang ada. Pemilihan yang tepat memerlukan pemahaman standar akurasi sinkronisasi, karakteristik dinamis anti-getaran, dan persyaratan kompatibilitas untuk mekanisme pergantian yang cepat.
Baru-baru ini saya berkonsultasi dengan produsen komponen otomotif yang mengalami tingkat penolakan 4,2% karena ketidaksejajaran komponen dan cacat akibat getaran. Setelah menerapkan perlengkapan pneumatik yang ditentukan dengan benar dengan sinkronisasi yang ditingkatkan dan kontrol getaran, tingkat penolakan mereka turun di bawah 0,3%, menghemat lebih dari $230.000 per tahun dalam biaya skrap dan pengerjaan ulang. Izinkan saya membagikan apa yang telah saya pelajari tentang memilih perlengkapan pneumatik yang sempurna untuk aplikasi Anda.
Daftar Isi
- Cara Menerapkan Standar Akurasi Sinkronisasi Multi-Rahang untuk Aplikasi Presisi
- Analisis Dinamis Struktur Anti-getaran untuk Stabilitas Optimal
- Panduan Kompatibilitas Mekanisme Pergantian Cepat untuk Pergantian yang Efisien
Cara Menerapkan Standar Akurasi Sinkronisasi Multi-Rahang untuk Aplikasi Presisi
Akurasi sinkronisasi pada perlengkapan pneumatik multi-rahang secara langsung berdampak pada presisi pemosisian komponen dan kualitas produksi secara keseluruhan.
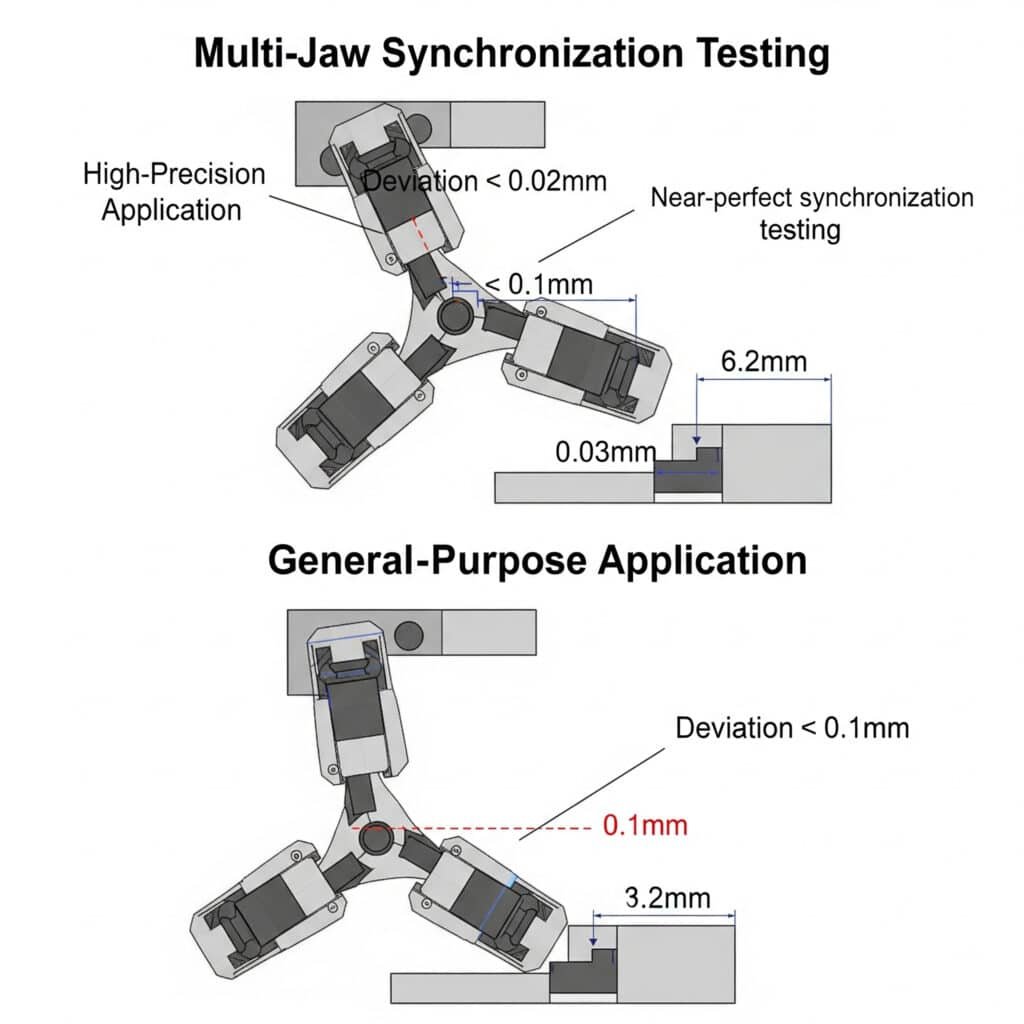
Akurasi sinkronisasi multi-rahang mengacu pada deviasi posisi maksimum antara dua rahang selama siklus penjepitan, biasanya diukur dalam seperseratus milimeter. Standar industri menentukan toleransi sinkronisasi yang dapat diterima berdasarkan persyaratan presisi aplikasi, dengan aplikasi presisi tinggi yang menuntut penyimpangan di bawah 0,02 mm sementara aplikasi tujuan umum dapat mentolerir hingga 0,1 mm.
Memahami Standar Akurasi Sinkronisasi
Standar sinkronisasi bervariasi menurut industri dan persyaratan presisi aplikasi:
| Industri | Jenis Aplikasi | Toleransi Sinkronisasi | Standar Pengukuran | Frekuensi Pengujian |
|---|---|---|---|---|
| Otomotif | Pertemuan umum | ± 0,05-0,1mm | ISO 230-21 | Triwulanan |
| Otomotif | Komponen presisi | ± 0,02-0,05mm | ISO 230-2 | Bulanan |
| Dirgantara | Komponen umum | ± 0,03-0,05mm | AS9100D | Bulanan |
| Dirgantara | Komponen penting | ± 0,01-0,02mm | AS9100D | Mingguan |
| Medis | Instrumen bedah | ± 0,01-0,03mm | ISO 13485 | Mingguan |
| Elektronik | Perakitan PCB | ± 0,02-0,05mm | IPC-A-610 | Bulanan |
| Manufaktur umum | Bagian yang tidak kritis | ± 0,08-0,15mm | ISO 9001 | Dua kali setahun |
Metodologi Pengujian Standar
Ada beberapa metode yang sudah mapan untuk mengukur akurasi sinkronisasi multi-jaw:
Metode Sensor Perpindahan (Sesuai dengan ISO 230-2)
Ini adalah pendekatan pengujian yang paling umum dan dapat diandalkan:
Penyiapan pengujian
- Memasang sensor perpindahan presisi tinggi (LVDT2 atau kapasitif) pada perlengkapan referensi
- Sensor posisi untuk menghubungi setiap rahang pada posisi relatif yang sama
- Menghubungkan sensor ke sistem akuisisi data tersinkronisasi
- Memastikan stabilitas suhu (20°C ± 1°C)Prosedur pengujian
- Inisialisasi sistem dengan rahang dalam posisi terbuka penuh
- Mengaktifkan siklus penjepitan pada tekanan operasi standar
- Rekam data posisi untuk semua rahang selama gerakan
- Ulangi tes minimal 5 kali
- Mengukur dalam berbagai kondisi:
- Tekanan operasi standar
- Tekanan minimum yang ditentukan (-10%)
- Tekanan maksimum yang ditentukan (+10%)
- Dengan muatan terukur maksimum
- Pada kecepatan yang berbeda (jika dapat disesuaikan)Analisis data
- Hitung deviasi maksimum antara dua rahang pada setiap titik dalam perjalanan
- Tentukan kesalahan sinkronisasi maksimum di seluruh goresan penuh
- Menganalisis pengulangan di beberapa siklus pengujian
- Mengidentifikasi pola lead/lag yang konsisten di antara rahang tertentu
Sistem Pengukuran Optik
Untuk aplikasi presisi tinggi atau gerakan rahang yang kompleks:
Pengaturan dan kalibrasi
- Pasang target optik pada setiap rahang
- Posisikan kamera berkecepatan tinggi untuk menangkap semua target secara bersamaan
- Mengkalibrasi sistem untuk menetapkan referensi spasialProses pengukuran
- Merekam gerakan rahang pada kecepatan bingkai tinggi (500+ fps)
- Memproses gambar untuk mengekstrak data posisi
- Hitung posisi 3D setiap rahang sepanjang siklusMetrik analisis
- Deviasi posisi maksimum antara rahang
- Akurasi sinkronisasi sudut
- Konsistensi lintasan
Faktor yang Mempengaruhi Akurasi Sinkronisasi
Beberapa faktor utama memengaruhi performa sinkronisasi perlengkapan multi-jaw:
Faktor Desain Mekanis
Jenis mekanisme kinematik
- Digerakkan dengan baji: Sinkronisasi yang baik, desain yang ringkas
- Digerakkan oleh kamera: Sinkronisasi yang sangat baik, desain yang rumit
- Sistem tautan: Sinkronisasi variabel, desain sederhana
- Penggerak langsung: Sinkronisasi alami yang buruk, memerlukan kompensasiSistem panduan rahang
- Bantalan linier: Presisi tinggi, sensitif terhadap kontaminasi
- Slide pas: Presisi sedang, daya tahan yang baik
- Pemandu rol: Presisi yang baik, daya tahan yang sangat baik
- Bantalan biasa: Presisi lebih rendah, konstruksi sederhanaKetepatan manufaktur
- Toleransi komponen
- Akurasi perakitan
- Stabilitas material
Faktor Sistem Pneumatik
Desain distribusi udara
- Desain berjenis yang seimbang: Sangat penting untuk distribusi tekanan yang sama
- Panjang tabung yang sama: Meminimalkan perbedaan waktu
- Penyeimbangan pembatas aliran: Mengimbangi perbedaan mekanisKontrol aktuasi
- Presisi pengaturan tekanan
- Konsistensi kontrol aliran
- Waktu respons katupDinamika sistem
- Efek kompresibilitas udara
- Variasi tekanan dinamis
- Perbedaan hambatan aliran
Teknik Kompensasi Sinkronisasi
Untuk aplikasi yang memerlukan sinkronisasi luar biasa, teknik kompensasi ini dapat digunakan:
Kompensasi mekanis
- Tautan yang dapat disesuaikan untuk sinkronisasi awal
- Shim presisi untuk penyelarasan rahang
- Optimalisasi profil kameraKompensasi pneumatik
- Kontrol aliran individual untuk setiap rahang
- Katup urutan untuk gerakan terkontrol
- Ruang penyeimbang tekananSistem kontrol tingkat lanjut
- Kontrol posisi servo-pneumatik
- Pemantauan sinkronisasi elektronik
- Algoritme kontrol adaptif
Studi Kasus: Peningkatan Sinkronisasi dalam Aplikasi Otomotif
Baru-baru ini saya bekerja dengan pemasok otomotif tingkat satu yang memproduksi rumah transmisi aluminium. Mereka mengalami ketidakkonsistenan penempatan komponen pada perlengkapan permesinan mereka, yang mengakibatkan variasi dimensi dan kadang-kadang terjadi kerusakan.
Analisis terungkap:
- Perlengkapan 4-rahang yang ada dengan kesalahan sinkronisasi ± 0,08mm
- Persyaratan: deviasi maksimum ± 0,03mm
- Tantangan Solusi retrofit tanpa penggantian perlengkapan yang lengkap
Dengan menerapkan solusi yang komprehensif:
- Ditingkatkan ke komponen linkage yang disesuaikan dengan presisi
- Manifold distribusi pneumatik seimbang yang terpasang
- Menambahkan katup kontrol aliran individual dengan penyesuaian penguncian
- Menerapkan verifikasi rutin menggunakan pengujian sensor perpindahan
Hasilnya sangat signifikan:
- Akurasi sinkronisasi yang ditingkatkan hingga ±0,025mm
- Mengurangi variasi pemosisian bagian sebesar 68%
- Menghilangkan kerusakan mesin yang berhubungan dengan perlengkapan
- Penurunan penolakan kualitas sebesar 71%
- ROI dicapai dalam 7,5 minggu
Analisis Dinamis Struktur Anti-getaran untuk Stabilitas Optimal
Getaran pada perlengkapan pneumatik dapat secara signifikan memengaruhi kualitas pemesinan, masa pakai alat, dan efisiensi produksi. Desain anti-getaran yang tepat sangat penting untuk aplikasi presisi tinggi.
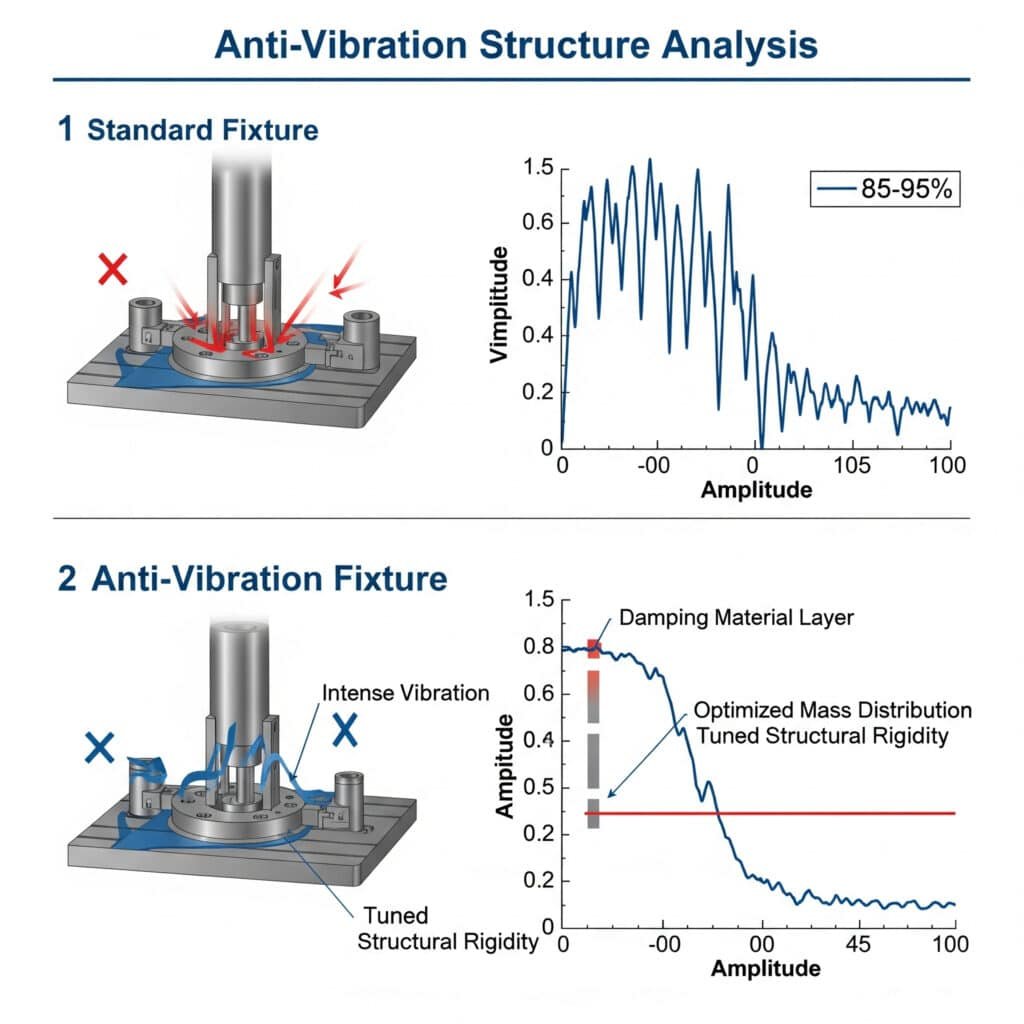
Struktur anti-getaran pada perlengkapan pneumatik menggunakan bahan peredam yang ditargetkan, distribusi massa yang dioptimalkan, dan karakteristik dinamis yang disetel untuk meminimalkan getaran yang berbahaya. Desain yang efektif mengurangi amplitudo getaran sebesar 85-95% pada frekuensi kritis dengan tetap mempertahankan kekakuan perlengkapan yang diperlukan, sehingga menghasilkan permukaan akhir yang lebih baik, masa pakai alat yang lebih lama, dan akurasi dimensi yang ditingkatkan.
Memahami Dinamika Getaran Perlengkapan
Getaran perlengkapan melibatkan interaksi yang kompleks antara beberapa komponen dan gaya:
Konsep Getaran Utama
- Frekuensi alami: Frekuensi inheren di mana sebuah struktur cenderung bergetar ketika terganggu
- Resonansi: Amplifikasi getaran ketika frekuensi eksitasi sesuai dengan frekuensi alami
- Rasio redaman: Mengukur seberapa cepat energi getaran menghilang (lebih tinggi lebih baik)
- Penularan: Rasio getaran output terhadap getaran input
- Analisis modal: Identifikasi mode getaran dan karakteristiknya
- Fungsi respons frekuensi: Hubungan antara input dan output pada frekuensi yang berbeda
Parameter Getaran Kritis
| Parameter | Signifikansi | Metode Pengukuran | Rentang Target |
|---|---|---|---|
| Frekuensi alami | Menentukan potensi resonansi | Pengujian dampak, analisis modal | >30% di atas / di bawah frekuensi operasi |
| Rasio redaman | Kemampuan pembuangan energi | Penurunan logaritmik, setengah daya | 0,05-0,15 (lebih tinggi lebih baik) |
| Transmisibilitas | Efektivitas isolasi getaran | Perbandingan akselerometer | <0,3 pada frekuensi operasi |
| Kekakuan | Kapasitas beban dan ketahanan defleksi | Pengujian beban statis | Khusus aplikasi |
| Kepatuhan dinamis | Perpindahan per satuan gaya | Fungsi respons frekuensi | Meminimalkan frekuensi pemotongan |
Metodologi Analisis Dinamis
Ada beberapa metode yang sudah mapan untuk menganalisis karakteristik getaran perlengkapan:
Analisis Modal Eksperimental3
Standar emas untuk memahami dinamika perlengkapan yang sebenarnya:
Penyiapan pengujian
- Pasang perlengkapan dalam kondisi pengoperasian yang sebenarnya
- Memasang akselerometer di lokasi strategis
- Gunakan palu tumbukan atau pengocok yang telah dikalibrasi untuk eksitasi
- Hubungkan ke penganalisis sinyal dinamis multi-saluranProsedur pengujian
- Menerapkan eksitasi tumbukan atau sinus tersapu
- Mengukur respons di beberapa titik
- Menghitung fungsi respons frekuensi
- Mengekstrak parameter modal (frekuensi, redaman, bentuk mode)Metrik analisis
- Frekuensi alami dan kedekatannya dengan frekuensi operasi
- Rasio redaman pada mode kritis
- Bentuk mode dan potensi gangguan pada benda kerja
- Tanggapan frekuensi pada frekuensi pemesinan yang khas
Analisis Bentuk Defleksi Operasional
Untuk memahami perilaku dalam kondisi operasi yang sebenarnya:
Proses pengukuran
- Pasang akselerometer di seluruh perlengkapan dan benda kerja
- Merekam getaran selama operasi pemesinan aktual
- Gunakan pengukuran dengan referensi faseTeknik analisis
- Menghidupkan bentuk defleksi pada frekuensi masalah
- Identifikasi lokasi defleksi maksimum
- Menentukan hubungan fase antar komponen
- Berkorelasi dengan masalah kualitas
Strategi Desain Anti-getaran
Perlengkapan anti-getaran yang efektif menggabungkan beberapa strategi:
Pendekatan Desain Struktural
Optimalisasi distribusi massal
- Meningkatkan massa di lokasi-lokasi kritis
- Menyeimbangkan distribusi massa untuk momen minimal
- Gunakan analisis elemen hingga4 untuk mengoptimalkanPeningkatan kekakuan
- Struktur pendukung yang ditriangulasi
- Paku yang strategis di area dengan defleksi tinggi
- Pemilihan bahan untuk rasio kekakuan terhadap berat yang optimalIntegrasi redaman
- Redaman lapisan terkendali di lokasi-lokasi strategis
- Peredam massa yang disetel untuk frekuensi tertentu
- Sisipan bahan viskoelastik pada antarmuka
Pemilihan Bahan untuk Kontrol Getaran
| Jenis Bahan | Kapasitas Redaman | Kekakuan | Berat | Aplikasi Terbaik |
|---|---|---|---|---|
| Besi tuang | Luar biasa | Sangat bagus | Tinggi | Perlengkapan tujuan umum |
| Beton polimer | Luar biasa | Bagus. | Tinggi | Perlengkapan pemesinan presisi |
| Aluminium dengan sisipan peredam | Bagus. | Bagus. | Sedang | Ringan, presisi sedang |
| Baja dengan redaman terbatas | Sangat bagus | Luar biasa | Tinggi | Pemesinan berat |
| Bahan komposit | Luar biasa | Variabel | Rendah | Aplikasi khusus |
Teknik Isolasi Getaran
Untuk memisahkan perlengkapan dari sumber getaran:
Sistem isolasi pasif
- Isolator elastomer (karet alam, neoprena)
- Isolator pneumatik
- Sistem peredam pegasSistem isolasi aktif
- Aktuator piezoelektrik
- Aktuator elektromagnetik
- Sistem kontrol umpan balikSistem hibrida
- Gabungan solusi pasif/aktif
- Kemampuan penyetelan adaptif
Studi Kasus: Peningkatan Anti-getaran dalam Pemesinan Presisi
Baru-baru ini saya berkonsultasi dengan produsen perangkat medis yang memproduksi komponen implan titanium. Mereka mengalami hasil akhir permukaan yang tidak konsisten dan variabilitas usia pakai pahat selama operasi penggilingan berkecepatan tinggi.
Analisis terungkap:
- Frekuensi alami perlengkapan 220Hz yang sangat cocok dengan frekuensi spindel
- Faktor amplifikasi 8,5x pada resonansi
- Peredaman yang tidak memadai (rasio 0,03)
- Distribusi getaran yang tidak merata di seluruh perlengkapan
Dengan menerapkan solusi yang komprehensif:
- Perlengkapan yang didesain ulang dengan pola rusuk yang dioptimalkan
- Menambahkan redaman lapisan terbatas pada permukaan primer
- Peredam massa yang disetel dengan target 220Hz
- Sistem isolasi pneumatik yang terpasang
Hasilnya sangat signifikan:
- Menggeser frekuensi alami ke 380Hz (jauh dari jangkauan operasi)
- Peningkatan rasio redaman menjadi 0,12
- Mengurangi amplitudo getaran sebesar 91%
- Konsistensi hasil akhir permukaan yang lebih baik dengan 78%
- Memperpanjang usia pakai alat sebesar 2,3x
- Mengurangi waktu siklus sebesar 15% melalui parameter pemotongan yang lebih tinggi
Panduan Kompatibilitas Mekanisme Pergantian Cepat untuk Pergantian yang Efisien
Mekanisme penggantian cepat secara signifikan mengurangi waktu penyiapan dan meningkatkan fleksibilitas produksi, tetapi hanya jika disesuaikan dengan kebutuhan spesifik Anda.
Mekanisme penggantian cepat pada perlengkapan pneumatik menggunakan sistem antarmuka standar untuk memungkinkan pergantian perlengkapan yang cepat tanpa mengorbankan presisi atau stabilitas. Memilih sistem yang kompatibel memerlukan pemahaman standar koneksi, spesifikasi pengulangan, dan persyaratan antarmuka untuk memastikan integrasi yang mulus dengan peralatan yang ada sambil mempertahankan akurasi pemosisian yang diperlukan.

Memahami Jenis Sistem Perubahan Cepat
Tersedia beberapa sistem penggantian cepat standar, masing-masing dengan karakteristik yang berbeda:
Standar Perubahan Cepat Utama
| Jenis Sistem | Standar Antarmuka | Akurasi Pemosisian | Kapasitas Beban | Mekanisme Penguncian | Aplikasi Terbaik |
|---|---|---|---|---|---|
| Penjepitan titik nol5 | AMF/Stark/Schunk | ± 0,005mm | Tinggi | Mekanis / pneumatik | Pemesinan presisi |
| Sistem palet | Sistem 3R/Erowa | ± 0,002-0,005mm | Sedang | Mekanis / pneumatik | EDM, penggilingan, penggilingan |
| Berbasis T-slot | Jergens/Carr Lane | ± 0,025mm | Tinggi | Mekanis | Pemesinan umum |
| Kunci bola | Jergens/Halder | ± 0,013mm | Sedang-tinggi | Mekanis | Aplikasi serbaguna |
| Magnetik | Maglock/Eclipse | ± 0,013mm | Sedang | Elektromagnetik | Benda kerja datar |
| Piramida/kerucut | VDI/ISO | ± 0,010mm | Tinggi | Mekanis/hidrolik | Pemesinan berat |
Faktor Penilaian Kompatibilitas
Ketika mengevaluasi kompatibilitas sistem perubahan cepat, pertimbangkan faktor-faktor utama ini:
Kompatibilitas Antarmuka Mekanis
Standar koneksi fisik
- Dimensi pola pemasangan
- Spesifikasi receiver/stud
- Persyaratan izin
- Desain fitur penyelarasanPencocokan kapasitas beban
- Peringkat beban statis
- Kemampuan beban dinamis
- Batasan beban momen
- Persyaratan faktor keamananKompatibilitas lingkungan
- Kisaran suhu
- Paparan cairan pendingin/kontaminan
- Persyaratan kamar bersih
- Kebutuhan pencucian
Kompatibilitas Kinerja
Persyaratan akurasi
- Spesifikasi pengulangan
- Akurasi pemosisian absolut
- Karakteristik stabilitas termal
- Stabilitas jangka panjangFaktor operasional
- Waktu penjepitan / pelepasan
- Persyaratan tekanan aktuasi
- Kemampuan pemantauan
- Perilaku mode kegagalan
Matriks Kompatibilitas Komprehensif
Matriks ini menyediakan kompatibilitas silang antara sistem perubahan cepat utama:
| Sistem | AMF | Schunk | Stark | Sistem 3R | Erowa | Jergens | Carr Lane | Maglock |
|---|---|---|---|---|---|---|---|---|
| AMF | Asli | Adaptor | Langsung | Adaptor | Tidak. | Adaptor | Adaptor | Tidak. |
| Schunk | Adaptor | Asli | Adaptor | Tidak. | Tidak. | Adaptor | Adaptor | Tidak. |
| Stark | Langsung | Adaptor | Asli | Tidak. | Tidak. | Adaptor | Adaptor | Tidak. |
| Sistem 3R | Adaptor | Tidak. | Tidak. | Asli | Adaptor | Tidak. | Tidak. | Tidak. |
| Erowa | Tidak. | Tidak. | Tidak. | Adaptor | Asli | Tidak. | Tidak. | Tidak. |
| Jergens | Adaptor | Adaptor | Adaptor | Tidak. | Tidak. | Asli | Langsung | Adaptor |
| Carr Lane | Adaptor | Adaptor | Adaptor | Tidak. | Tidak. | Langsung | Asli | Adaptor |
| Maglock | Tidak. | Tidak. | Tidak. | Tidak. | Tidak. | Adaptor | Adaptor | Asli |
Persyaratan Antarmuka Pneumatik
Sistem perubahan cepat memerlukan koneksi pneumatik yang tepat untuk pengoperasian:
Standar Koneksi Pneumatik
| Jenis Sistem | Standar Koneksi | Tekanan Operasi | Persyaratan Aliran | Antarmuka Kontrol |
|---|---|---|---|---|
| Nol poin | M5/G1/8 | 5-6 bar | 20-40 l/menit | Katup 5/2 atau 5/3 |
| Pallet | M5 | 6-8 bar | 15-25 l/menit | Katup 5/2 |
| Kunci bola | G1/4 | 5-7 bar | 30-50 l/menit | Katup 5/2 |
| Piramida | G1/4 | 6-8 bar | 40-60 l/menit | Katup 5/2 dengan penguat tekanan |
Strategi Implementasi untuk Sistem Campuran
Untuk fasilitas dengan beberapa standar perubahan cepat:
Penilaian standardisasi
- Menginventarisasi sistem yang ada
- Mengevaluasi persyaratan kinerja
- Menentukan kelayakan migrasiPendekatan transisi
- Strategi penggantian langsung
- Integrasi berbasis adaptor
- Implementasi sistem hibrida
- Rencana migrasi bertahapPersyaratan dokumentasi
- Spesifikasi antarmuka
- Persyaratan adaptor
- Spesifikasi tekanan/aliran
- Prosedur pemeliharaan
Studi Kasus: Integrasi Sistem Perubahan Cepat
Baru-baru ini saya bekerja dengan produsen kontrak yang memproduksi komponen untuk berbagai industri. Mereka kesulitan dengan waktu pergantian yang berlebihan dan pemosisian yang tidak konsisten ketika beralih di antara lini produk yang berbeda.
Analisis terungkap:
- Tiga sistem penggantian cepat yang tidak kompatibel di 12 mesin
- Waktu pergantian rata-rata 42 menit
- Masalah pengulangan posisi setelah pergantian
- Komplikasi sambungan pneumatik
Dengan menerapkan solusi yang komprehensif:
- Terstandarisasi pada sistem penjepitan titik nol
- Mengembangkan adaptor khusus untuk perlengkapan lama
- Menciptakan panel antarmuka pneumatik standar
- Menerapkan sistem koneksi berkode warna
- Instruksi kerja visual yang dikembangkan
Hasilnya sungguh mengesankan:
- Mengurangi waktu pergantian rata-rata menjadi 8,5 menit
- Pengulangan posisi yang lebih baik hingga ±0,008mm
- Menghilangkan kesalahan koneksi
- Peningkatan pemanfaatan alat berat sebesar 14%
- ROI dicapai dalam 4,2 bulan
Strategi Pemilihan Perlengkapan Pneumatik yang Komprehensif
Untuk memilih perlengkapan pneumatik yang optimal untuk aplikasi apa pun, ikuti pendekatan terpadu ini:
Menetapkan persyaratan presisi
- Tentukan akurasi pemosisian bagian yang diperlukan
- Mengidentifikasi dimensi dan toleransi kritis
- Menetapkan batas getaran yang dapat diterima
- Tentukan target waktu pergantianMenganalisis kondisi operasional
- Mengkarakterisasi gaya dan getaran pemesinan
- Mendokumentasikan faktor lingkungan
- Memetakan alur kerja dan persyaratan pergantian
- Mengidentifikasi kendala kompatibilitasPilih teknologi yang sesuai
- Pilih mekanisme sinkronisasi berdasarkan kebutuhan akurasi
- Memilih fitur anti-getaran berdasarkan analisis dinamis
- Tentukan sistem perubahan cepat berdasarkan kompatibilitasMemvalidasi pilihan
- Pengujian prototipe jika memungkinkan
- Tolok ukur terhadap standar industri
- Menghitung ROI yang diharapkan dan peningkatan kinerja
Matriks Seleksi Terpadu
| Persyaratan Aplikasi | Sinkronisasi yang Disarankan | Pendekatan Anti-getaran | Sistem perubahan cepat |
|---|---|---|---|
| Pemesinan ringan dengan presisi tinggi | Digerakkan oleh cam (± 0,01-0,02 mm) | Struktur komposit dengan peredaman yang disetel | Titik nol presisi |
| Presisi sedang, pemesinan berat | Digerakkan dengan baji (± 0,03-0,05 mm) | Besi tuang dengan redaman lapisan terbatas | Kunci bola atau piramida |
| Tujuan umum, perubahan yang sering terjadi | Sistem tautan (± 0,05-0,08 mm) | Baja dengan rusuk yang strategis | Sistem berbasis T-slot |
| Berkecepatan tinggi, peka terhadap getaran | Penggerak langsung dengan kompensasi | Sistem peredaman aktif | Sistem palet presisi |
| Suku cadang besar, presisi sedang | Sinkronisasi pneumatik | Optimalisasi dan isolasi massa | Titik nol tugas berat |
Kesimpulan
Memilih perlengkapan pneumatik yang optimal memerlukan pemahaman standar sinkronisasi multi-rahang, karakteristik dinamis anti-getaran, dan persyaratan kompatibilitas perubahan cepat. Dengan menerapkan prinsip-prinsip ini, Anda dapat mencapai pemosisian komponen yang tepat, meminimalkan getaran yang berbahaya, dan mengurangi waktu pergantian dalam aplikasi manufaktur apa pun.
Tanya Jawab Tentang Pemilihan Perlengkapan Pneumatik
Seberapa sering sinkronisasi multi-jaw harus diuji dalam lingkungan produksi?
Untuk aplikasi manufaktur umum, uji sinkronisasi setiap tiga bulan. Untuk aplikasi presisi (medis, kedirgantaraan), uji setiap bulan. Untuk aplikasi kritis dengan toleransi yang ketat (<0,02 mm), lakukan verifikasi mingguan. Selalu uji setelah perawatan, perubahan tekanan, atau ketika masalah kualitas muncul. Gunakan sensor perpindahan yang dikalibrasi dan dokumentasikan hasilnya dalam sistem kualitas Anda. Pertimbangkan untuk menerapkan tes go/no-go sederhana untuk verifikasi operator harian di antara pengukuran formal.
Apa solusi anti-getaran yang paling hemat biaya untuk perlengkapan yang sudah ada?
Untuk perlengkapan yang sudah ada, peredaman lapisan terbatas biasanya merupakan solusi retrofit yang paling hemat biaya. Aplikasikan lembaran polimer viskoelastik dengan lapisan logam tipis yang membatasi pada area getaran tinggi yang diidentifikasi melalui pengujian tap atau analisis modal. Fokus pada area dengan defleksi maksimum pada mode getaran yang bermasalah. Pendekatan ini biasanya mengurangi getaran hingga 50-70% dengan biaya yang murah. Untuk efektivitas yang lebih tinggi, pertimbangkan untuk menambahkan massa di lokasi strategis dan menerapkan dudukan isolasi antara perlengkapan dan meja mesin.
Dapatkah saya mencampur sistem penggantian cepat yang berbeda dalam sel produksi yang sama?
Ya, tetapi membutuhkan perencanaan yang cermat dan strategi adaptor. Pertama, kenali sistem "primer" Anda berdasarkan persyaratan akurasi dan investasi yang ada. Kemudian gunakan adaptor khusus untuk mengintegrasikan sistem sekunder. Penumpukan adaptor dokumen berpengaruh pada akurasi dan kekakuan, karena setiap antarmuka menambah potensi kesalahan. Buat sistem identifikasi visual yang jelas untuk mencegah ketidaksesuaian dan menstandarkan koneksi pneumatik di semua sistem. Untuk efisiensi jangka panjang, kembangkan rencana migrasi untuk menstandarkan sistem tunggal saat perlengkapan diganti.
-
Memberikan gambaran umum mengenai standar ISO 230-2, yang menetapkan metode untuk menguji akurasi pemosisian dan pengulangan peralatan mesin yang dikontrol secara numerik. ↩
-
Menjelaskan prinsip kerja Linear Variable Differential Transformer (LVDT), jenis transformator listrik yang digunakan untuk mengukur perpindahan linear dengan presisi dan keandalan tinggi. ↩
-
Menjelaskan tentang Experimental Modal Analysis (EMA), sebuah proses penentuan parameter modal (frekuensi natural, rasio redaman, dan bentuk modus) dari sebuah struktur berdasarkan data uji getaran. ↩
-
Menawarkan penjelasan tentang Finite Element Analysis (FEA), metode komputasi yang kuat untuk mensimulasikan bagaimana produk atau komponen akan bereaksi terhadap gaya dunia nyata, getaran, panas, dan efek fisik lainnya selama fase desain. ↩
-
Merinci prinsip-prinsip sistem penjepitan titik nol, suatu jenis teknologi penahan kerja modular yang memberikan metode yang sangat akurat, berulang, dan cepat untuk memposisikan dan mengamankan perlengkapan atau benda kerja. ↩
