

Standartiniai dviejų padėčių cilindrai riboja automatizavimo lankstumą, todėl inžinieriai priversti naudoti sudėtingas mechanines sistemas arba brangius Servo sprendimai1200-400% padidėja sąnaudos ir sudėtingėja techninė priežiūra. Daugiapoziciniuose cilindruose tarpiniai stabdžiai pasiekiami naudojant mechanines atramas, pneumatines sekvencines arba elektronines padėties valdymo sistemas, kurios tiksliai nustato stūmoklio padėtį iš anksto nustatytose padėtyse išilgai eigos ilgio, todėl su viena pavara galima atlikti sudėtingas automatizavimo sekas. Praėjusią savaitę padėjau pakuočių inžinieriui Marcusui iš Viskonsino, kurio rūšiavimo sistemai reikėjo trijų skirtingų padėčių, tačiau jis susidūrė su kelių cilindrų išdėstymo sudėtingumu ir išlaidomis. 🎯
Turinys
- Kokios yra skirtingos kelių padėčių cilindrų technologijos?
- Kaip mechaninės detentų sistemos užtikrina patikimą padėties valdymą?
- Kodėl "Bepto" daugiapoziciniai cilindrai yra protingas pasirinkimas sudėtingam automatizavimui?
Kokios yra skirtingos kelių padėčių cilindrų technologijos?
Supratimas apie įvairias kelių padėčių cilindrų technologijas padeda inžinieriams pasirinkti optimalų sprendimą, atitinkantį konkrečius automatizavimo reikalavimus ir tikslumo poreikius.
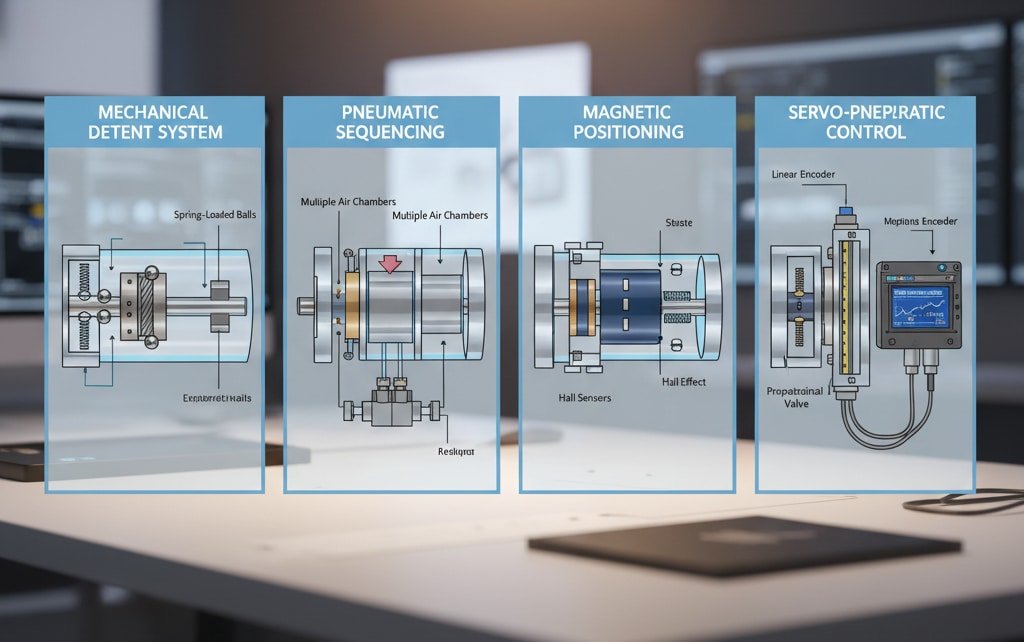
Daugiapoziciniuose cilindruose naudojamos mechaninės stabdymo sistemos su spyruokliniais rutuliukais, pneumatinis sekvencinis valdymas su keliomis oro kameromis, magnetinis pozicionavimas su Hallo jutikliais arba servopneumatinis valdymas su elektroniniu grįžtamuoju ryšiu, kad būtų pasiektas tikslus tarpinis stabdymas išilgai cilindro eigos.
Mechaninės stabdymo sistemos
Spyruokliniai rutuliniai fiksatoriai:
- Tiksliai apdirbti stūmoklio strypo grioveliai
- Spyruokliniai rutuliukai užfiksuoja atramines padėtis
- Mechaninio valdymo funkcija avariniam darbui
- Pozicijos palaikymui nereikalinga išorinė energija
Krumpliaračio judesiais valdomi fiksatoriai:
- Sukamasis kumštelinis mechanizmas valdo padėties pasirinkimą
- Keletas sulaikymo padėčių per apsisukimą
- Didelė laikymo jėga
- Tinka sunkiems darbams
Pleištinio tipo fiksatoriai:
- Kūgiški pleištiniai elementai užtikrina padėties nustatymą
- Savaime užsifiksuojanti konstrukcija apsaugo nuo dreifo
- Didelis tikslumas ir pakartojamumas
- Kompaktiškas dizainas, skirtas ribotos vietos programoms
Pneumatinės sekos nustatymo sistemos
Kelių kamerų dizainas:
- Atskiros oro kameros kiekvienai padėčiai
- Sekvencinis vožtuvo valdymas pozicijų parinkimui
- Nepriklausomas slėgio valdymas kiekvienoje kameroje
- Sklandus perėjimas iš vienos pozicijos į kitą
Bandomasis sekos nustatymas:
- Mažieji bandomieji cilindrai valdo pagrindinių cilindrų padėtis
- Mažesnis oro suvartojimas, palyginti su kelių kamerų
- Greitesnis reagavimo laikas
- Mažesnė kaina nei visos daugiakomorės sistemos
Elektroninis padėties valdymas
| Technologijos tipas | Padėties tikslumas | Reakcijos laikas | Maitinimo reikalavimai | Tipinės programos |
|---|---|---|---|---|
| Mechaninis fiksatorius | ±0,1 mm | 0,5-1,0 sek. | Nėra | Surinkimas, rūšiavimas |
| Pneumatinė seka | ±0,5 mm | 0,3-0,8 sek. | Suslėgtas oras | Medžiagų tvarkymas |
| Magnetinė padėtis | ±0,05 mm | 0,2-0,5 sek. | 24 V NUOLATINĖ SROVĖ | Tikslus surinkimas |
| Servo-pneumatinis | ±0,01 mm | 0,1-0,3 sek. | 24 V DC + grįžtamasis ryšys | Didelio tikslumo programos |
Magnetinė padėties nustatymo technologija
- Nekontaktinis padėties aptikimas
- Keli magnetiniai taikiniai ant stūmoklio
- Elektroninis padėties tikrinimas
- Programuojami padėties taškai
Nendrinių jungiklių matricos:
- Paprastas įjungimo / išjungimo padėties nustatymas
- Keli jungikliai išilgai cilindro
- Ekonomiškai efektyvus pagrindiniam padėties nustatymui
- Patikimas atšiaurioje aplinkoje
Servo-pneumatinė integracija
padėties grįžtamojo ryšio sistemos:
- Linijiniai koderiai3 pateikti tikslius padėties duomenis.
- Uždarosios kilpos valdymas, užtikrinantis tikslumą
- Programuojamos tarpinės padėtys
- Dinaminio padėties reguliavimo galimybė
Proporcinis vožtuvo valdymas:
- Kintamas srauto valdymas sklandžiam padėties nustatymui
- Elektroninis slėgio reguliavimas
- Kelių padėčių programavimas
- Integracija su PLC sistemos4
"Marcus" pakuočių programa puikiai parodė, kad reikia daugiapozicinės technologijos. Jo sistemai reikėjo trijų tikslių padėčių: produkto paėmimo (25 mm), tikrinimo stoties (75 mm) ir galutinio išdėstymo (125 mm). Tradiciniams sprendimams būtų reikėję trijų atskirų cilindrų arba sudėtingų mechaninių jungčių. Mūsų "Bepto" mechaninis sulaikomasis cilindras užtikrino visas tris padėtis viename patikimame įrenginyje! 📦
Kaip mechaninės detentų sistemos užtikrina patikimą padėties valdymą?
Mechaninės detentų sistemos užtikrina patikimą, nuo galios nepriklausomą padėties nustatymą, nes tiksliai sukurtos mechaninės sąsajos užfiksuoja cilindrą iš anksto nustatytose padėtyse.
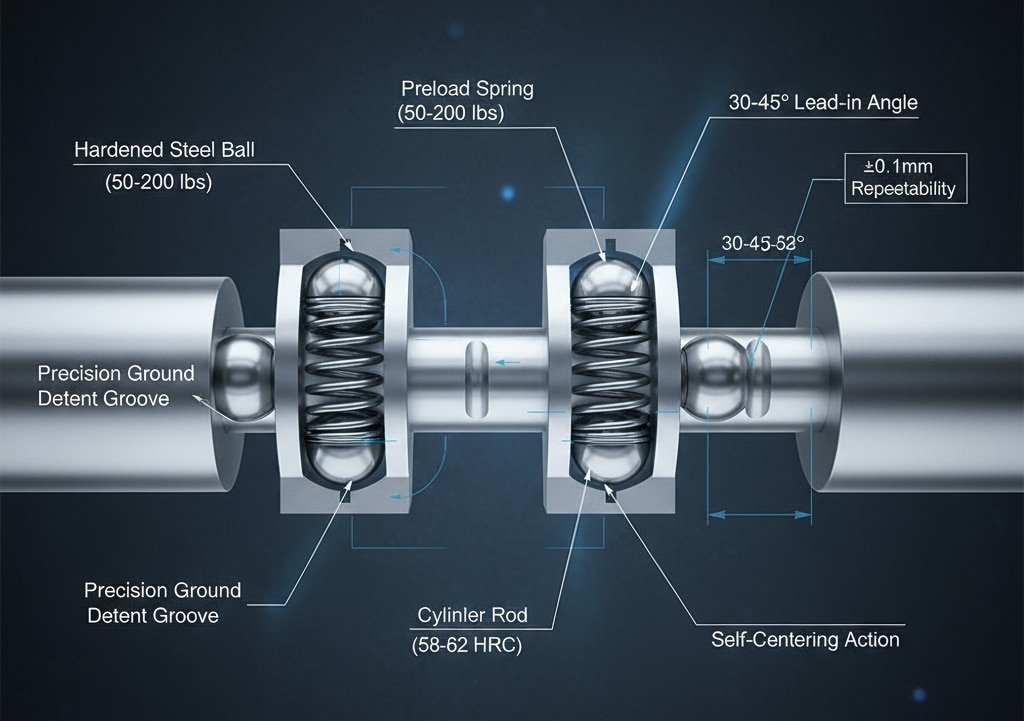
Mechaninėse fiksavimo sistemose naudojami spyruokliniai rutuliukai arba pleištai, kurie cilindro strype įsiremia į tiksliai apdirbtus griovelius arba įpjovas ir užtikrina teigiamą mechaninį fiksavimą tarpinėse padėtyse, pasižymintį dideliu pasikartojamumu ir laikomąja jėga, nereikalaujant išorinio maitinimo ar sudėtingo valdymo.
Detektoriaus mechanizmo konstrukcija
Kamuolinio fiksatoriaus konfigūracija:
- Grūdinto plieno rutuliukai (paprastai 6-12 mm skersmens)
- Spyruoklės išankstinės apkrovos jėga 50-200 svarų sterlingų
- Preciziškai nušlifuoti sulaikymo grioveliai
- Savaiminis centravimas, užtikrinantis pakartojamumą
Sužadėtuvių geometrija:
- 30-45 laipsnių įvado kampai sklandžiam sukibimui
- Viso spindulio griovelio profilis maksimaliam sąlyčiui užtikrinti
- Užgrūdinti paviršiai (58-62 HRC) atsparūs dilimui
- Tinkami atstumai patikimam veikimui užtikrinti
Padėties tikslumas ir pakartojamumas
Mechaninis tikslumas:
- Griovelių apdirbimo tolerancija ±0,025 mm
- Rutuliuko skersmens tolerancija ±0,0025 mm
- Spyruoklės jėgos pastovumas ±5%
- Bendras padėties pakartojamumas ±0,1 mm
Tikslumą lemiantys veiksniai:
- Detentų sudedamųjų dalių gamybos nuokrypiai
- Dėvėjimosi pobūdis ilgesnį laiką eksploatuojant
- Apkrovos pokyčiai, turintys įtakos sukibimo jėgai
- Temperatūros poveikis medžiagos matmenims
Jėgos analizė ir laikymo galia
Įsitraukimo pajėgos:
- Spyruoklės išankstinė įkrova lemia sukibimo jėgą
- Kamuoliuko kontakto plotas turi įtakos įtempių pasiskirstymui
- Griovelių geometrija turi įtakos laikymo jėgai
- Perjungimo jėga paprastai 2-3 kartus viršija sukibimo jėgą
Laikymo jėgos skaičiavimai:
- Ašinė laikomoji jėga = spyruoklės jėga × sin (griovelio kampas)
- Saugos koeficientas dinaminėms apkrovoms paprastai 3:1
- Temperatūros kompensavimas spyruoklės jėgos kitimui
- Apkrovos pajėgumo tikrinimas atliekant bandymus
Dizaino variantai ir konfigūracijos
| Detektoriaus tipas | Turimos pozicijos | Laikymo jėga | Valdymo jėga (angl. Override Force) | Geriausios programos |
|---|---|---|---|---|
| Kamuolio fiksatorius | 2-8 pozicijos | 100-500 svarų | 200-1000 svarų | Bendrasis automatizavimas |
| Pleištinis užraktas | 2-4 pozicijos | 500-2000 svarų | 1000-4000 svarų | Sunkiasvorės programos |
| Kamuolio fiksatorius | 3-12 pozicijų | 200-800 svarų | 400-1600 svarų | Daugiapakopiai procesai |
| Magnetinis fiksatorius | 2-6 pozicijos | 50-300 svarų | 100-600 svarų | Švari aplinka |
Įrengimo ir reguliavimo procedūros
Pradinė sąranka:
- Patikrinkite, ar detento padėtis atitinka taikymo reikalavimus
- Sureguliuokite spyruoklės išankstinę apkrovą, kad būtų užtikrinta tinkama sukibimo jėga
- Bandomoji avarinio veikimo valdymo jėga
- Dokumentuoti padėties nustatymus, kad būtų galima pateikti techninės priežiūros nuorodą
Priežiūros reikalavimai:
- Periodiškai tikrinamas detento griovelio nusidėvėjimas
- Kasmetinis pavasario jėgos patikrinimas
- Judančių komponentų tepimas
- Susidėvėjusių detentų elementų keitimas
Bendrų problemų šalinimas
Pozicijos dreifas:
- Patikrinkite detento griovelių nusidėvėjimo modelius
- Patikrinkite spyruoklės jėgos specifikacijas
- Patikrinkite, ar detento mechanizmas nėra užterštas
- Įvertinti apkrovos sąlygas ir laikymo jėgą
Įsitraukimo problemos:
- Patikrinkite rutuliuko arba pleišto nusidėvėjimą
- Patikrinkite griovelių paviršiaus apdailą
- Patikrinkite, ar tinkamai sutepta
- Komponentų suderinamumo įvertinimas
Aplinkosaugos aspektai
Temperatūros poveikis:
- Spyruoklės jėgos kitimas priklausomai nuo temperatūros
- Detentų sudedamųjų dalių šiluminis plėtimasis
- Medžiagos parinkimas pagal temperatūros diapazoną
- Ekstremalių sąlygų kompensavimo būdai
Apsauga nuo taršos:
- Sandarūs detentiniai mechanizmai nešvarioje aplinkoje
- Tiekiamo oro filtravimo reikalavimai
- Apsauginiai išorinių komponentų dangteliai
- Techninės priežiūros valymo procedūros
Mašinų dizainerei Jennifer iš Šiaurės Karolinos reikėjo patikimo suvirinimo įtaiso, veikiančio atšiaurioje gamybos aplinkoje, padėties nustatymo. Standartinės pneumatinės padėties nustatymo sistemos neveikė dėl užterštumo ir elektros energijos tiekimo sutrikimų. Mūsų mechaninė fiksavimo sistema užtikrino pastovų padėties nustatymą nepriklausomai nuo maitinimo būklės ir buvo atspari suvirinimo aplinkos poveikiui. elektromagnetiniai trukdžiai5! ⚡
Kodėl "Bepto" daugiapoziciniai cilindrai yra protingas pasirinkimas sudėtingam automatizavimui?
Mūsų pažangi daugiapozicinių cilindrų technologija sujungia tikslią inžineriją, lanksčias konfigūracijos galimybes ir ekonomiškus sprendimus, kad supaprastintų sudėtingus automatizavimo uždavinius.
"Bepto" daugiapoziciniai cilindrai pasižymi preciziškai apdirbtomis atkabinimo sistemomis, pritaikomomis padėčių konfigūracijomis, tvirta konstrukcija, tinkančia pramoninei aplinkai, ir visapusiška technine pagalba, užtikrinančia patikimą daugiapozicinį veikimą už 60% mažesnę kainą nei servopavarų alternatyvos, išlaikant puikų tikslumą ir ilgaamžiškumą.
Išplėstinės inžinerinės funkcijos
Tikslioji gamyba:
- CNC apdirbti ištraukiamieji grioveliai su ±0,01 mm paklaida
- Grūdinti ir šlifuoti detentų paviršiai (60+ HRC)
- Tiksliai suderinti spyruoklių mazgai
- Kokybiškai patikrintas padėties pakartojamumas
Pritaikymo galimybės:
- Galimos nuo 2 iki 8 padėčių konfigūracijos
- Individualus atstumas tarp padėčių nuo 10 mm iki 500 mm
- Kintama laikymo jėga nuo 50 iki 2000 svarų
- Specialios medžiagos atšiaurioms sąlygoms
Konfigūracijos parinktys ir lankstumas
Standartinės konfigūracijos:
- 3 padėčių cilindrai (populiariausi)
- Vienodo atstumo arba pasirinktiniai padėties intervalai
- Įvairių dydžių skylės nuo 1,5″ iki 8″
- Iki 60 colių ilgio eiga
Individualūs sprendimai:
- Asimetrinis atstumas tarp padėčių
- Kintama kiekvienos padėties sulaikymo jėga
- Specialios montavimo konfigūracijos
- Integruoti jutikliai ir grįžtamojo ryšio sistemos
Veikimo specifikacijos
| Cilindro anga | Maksimalios pozicijos | Padėties tikslumas | Laikymo jėga | Darbinis slėgis |
|---|---|---|---|---|
| 1,5″ (40 mm) | 6 pozicijos | ±0,1 mm | 200 svarų | 80-150 PSI |
| 2,5″ (63 mm) | 8 pozicijos | ±0,1 mm | 400 svarų | 80-150 PSI |
| 4″ (100 mm) | 6 pozicijos | ±0,05 mm | 800 svarų | 80-150 PSI |
| 6″ (160 mm) | 4 pozicijos | ±0,05 mm | 1500 svarų | 80-150 PSI |
Kokybės ir patikimumo privalumai
Testavimo standartai:
- 5 milijonų ciklų trukmės bandymai
- Padėties pakartojamumo patikra
- Laikymo jėgos patvirtinimas
- Patvarumo aplinkos sąlygomis bandymai
Patikimumo savybės:
- Sandarūs sulaikymo mechanizmai
- Korozijai atsparios medžiagos
- Temperatūriškai stabilios spyruoklės
- Užterštumui atspari konstrukcija
Sąnaudų efektyvumo analizė
Pradinės investicijos sutaupytos lėšos:
- 60% mažesnė kaina nei servo-pneumatinių sistemų
- 40% mažiau nei kelių cilindrų išdėstymas
- Mažesnis įrengimo sudėtingumas
- Mažesni reikalavimai valdymo sistemai
Veiklos sąnaudų nauda:
- Pozicijos palaikymui nereikalinga išorinė energija
- Minimalūs techninės priežiūros reikalavimai
- Sumažintas atsarginių dalių inventorius
- Mažesnis energijos suvartojimas
Techninė pagalba ir paslaugos
Inžinerinė pagalba:
- Taikymo analizė ir baliono dydžio nustatymas
- Pasirinktinės padėties konfigūracijos dizainas
- Įrengimo ir sąrankos gairės
- Gedimų šalinimas ir optimizavimo pagalba
Dokumentacija ir mokymas:
- Išsamūs diegimo vadovai
- Techninės priežiūros procedūrų dokumentai
- Techninio mokymo programos
- Internetiniai paramos ištekliai
Integracija ir suderinamumas
Valdymo sistemos integracija:
- Suderinamas su standartiniais pneumatiniais vožtuvais
- Papildomi padėties grįžtamojo ryšio jutikliai
- PLC integravimo galimybės
- Standartinės pramoninio montavimo sąsajos
Modernizavimo programos:
- Tiesioginis esamų cilindrų pakeitimas
- Montavimo suderinamumas su pagrindiniais prekių ženklais
- Sriegio parinktys (NPT, G, M5)
- Galimi pasirinktiniai adapterių sprendimai
Sėkmės istorijos ir programos
Patikrintos programos:
- Surinkimo linijos pozicionavimo sistemos
- Medžiagų tvarkymo įranga
- Pakavimo mašinų automatizavimas
- Testavimo ir tikrinimo įranga
Klientų rezultatai:
- 95% padėties nustatymo sistemos sudėtingumo sumažinimas
- 80% ciklo laiko nuoseklumo pagerinimas
- 70% priežiūros reikalavimų sumažėjimas
- 99,9% padėties pakartojamumo pasiekimas
Mūsų kelių padėčių cilindrų technologija sukėlė revoliuciją automatikos srityje daugiau nei 800 klientų visame pasaulyje, panaikindama sudėtingų mechaninių sistemų poreikį ir užtikrindama tikslų padėties nustatymą už pneumatinių cilindrų kainą. Mes ne tik gaminame cilindrus - mes projektuojame išbaigtus pozicionavimo sprendimus, kurie supaprastina automatizavimą ir padidina našumą! 🚀
Išvada
Daugelio padėčių cilindrai leidžia išvengti sudėtingų mechaninių sistemų ir brangių servopavarų sprendimų, nes užtikrina tikslų tarpinį padėties nustatymą, paprastą pneumatinį valdymą ir patikimą mechaninį veikimą.
DUK apie kelių padėčių cilindrus
K: Kiek padėčių gali turėti vienas daugiapozicinis cilindras?
"Bepto" daugiapoziciniai cilindrai gali turėti nuo 2 iki 8 skirtingų padėčių, priklausomai nuo kiaurymės dydžio ir eigos ilgio. Dažniausiai naudojamos 3-4 padėtys, kad būtų optimaliai subalansuotas funkcionalumas ir patikimumas, o specialius reikalavimus atitinkančios konfigūracijos gali būti pritaikomos pagal užsakymą.
K: Kas atsitinka, jei cilindras užstringa tarp padėčių?
Mūsų mechaninėse atramos sistemose yra galimybė perjungti, kad rankiniu arba pneumatiniu būdu cilindras būtų perkeltas į kitą padėtį. Spyruoklinė atramos konstrukcija natūraliai nukreipia stūmoklį į artimiausią stabilią padėtį darbo metu.
K: Ar daugiapoziciniai cilindrai gali išlaikyti tokias pačias apkrovas kaip ir standartiniai cilindrai?
Taip, "Bepto" daugiapoziciniai cilindrai išlaiko visą jėgą visose padėtyse. Atstūmimo mechanizmas padidina, o ne sumažina laikymo jėgą, o laikymo jėga, priklausomai nuo konfigūracijos, siekia nuo 200 iki 2000 svarų.
K: Kaip užprogramuoti skirtingas pozicijas naudojant esamą valdymo sistemą?
Daugelio padėčių cilindrai veikia su standartiniais pneumatiniais vožtuvais ir laiko valdikliais. Kiekvienai padėčiai reikalinga tam tikra vožtuvo seka ir laikas. Pateikiame išsamius programavimo vadovus ir galime padėti integruoti valdymo sistemą konkrečiai jūsų programai.
K: Kokios techninės priežiūros reikia daugiapozicinėms cilindrų sulaikymo sistemoms?
Techninė priežiūra yra minimali - kasmet tikrinamas detentų sukibimas, periodiškai tepamos judančios dalys ir tikrinamas padėties tikslumas. Dėl mechaninės konstrukcijos nenaudojami elektroniniai komponentai, kuriuos reikia dažnai kalibruoti arba keisti.
-
Sužinokite, kaip servo sistemos užtikrina didelio tikslumo judesio valdymą pramonės automatizavimo srityje. ↩
-
Sužinokite apie Hallo efekto jutiklių veikimo principus ir jų naudojimą bekontaktiniam padėties nustatymui. ↩
-
Sužinokite, kaip linijiniai koderiai užtikrina tikslų padėties grįžtamąjį ryšį uždarosiose valdymo sistemose. ↩
-
Suprasti programuojamų loginių valdiklių (PLC) vaidmenį valdant ir automatizuojant pramoninius procesus. ↩
-
Sužinokite apie elektromagnetinių trukdžių (EMI) priežastis ir poveikį pramoninėje aplinkoje. ↩
