

Hysterese1 er den usynlige presisjonsmorderen som lurer i hvert proporsjonalt aktuatorsystem – og ødelegger posisjoneringsnøyaktigheten med opptil 15% mens ingeniører skylder på alt annet enn den virkelige årsaken. Dette fenomenet fører til at aktuatorer “husker” sine tidligere posisjoner, noe som skaper uforutsigbare døde soner som gjør jevn kontroll til frustrerende inkonsekvens. 😠
Hysterese i proporsjonal aktuatorstyring skaper posisjoneringsfeil på 2-15% av full slaglengde på grunn av mekanisk tilbakeslag, tetningsfriksjon, magnetiske effekter og dødbånd i reguleringsventilen, noe som krever kompensasjon gjennom programvarealgoritmer, mekanisk forspenning, tilbakemelding med høyere oppløsning og riktig komponentvalg for å oppnå posisjoneringsnøyaktighet under 1%.
For to måneder siden jobbet jeg med Jennifer, en kontrollingeniør ved en flyprodusent i Seattle, hvor presisjonsmonteringsrobotene konsekvent bommet på målene med 3 mm – ikke tilfeldig, men i et forutsigbart mønster som tydet på hysterese. Etter å ha implementert våre Bepto-løsninger mot hysterese, sank posisjoneringsfeilene hennes til under 0,5 mm. ✈️
Innholdsfortegnelse
- Hva er hysterese egentlig, og hvorfor oppstår det i proporsjonale aktuatorer?
- Hvordan påvirker hysterese ulike typer proporsjonale kontrollsystemer?
- Hvilke måleteknikker identifiserer og kvantifiserer hystereseeffekter best?
- Hva er de mest effektive metodene for å minimere hysterese i systemet ditt?
Hva er hysterese egentlig, og hvorfor oppstår det i proporsjonale aktuatorer?
Forståelse av hysterese-mekanismer er avgjørende for å oppnå presis proporsjonal kontroll i pneumatiske og hydrauliske aktuatorsystemer.
Hysterese oppstår når aktuatorens utgangsposisjon avhenger både av gjeldende inngangskommando og tidligere posisjonshistorikk, noe som skaper forskjellige responsbaner for økende og avtagende kommandoer på grunn av mekanisk tilbakeslag, friksjonskrefter, magnetiske effekter og dødbånd i reguleringsventilen som akkumuleres gjennom hele reguleringssløyfen.
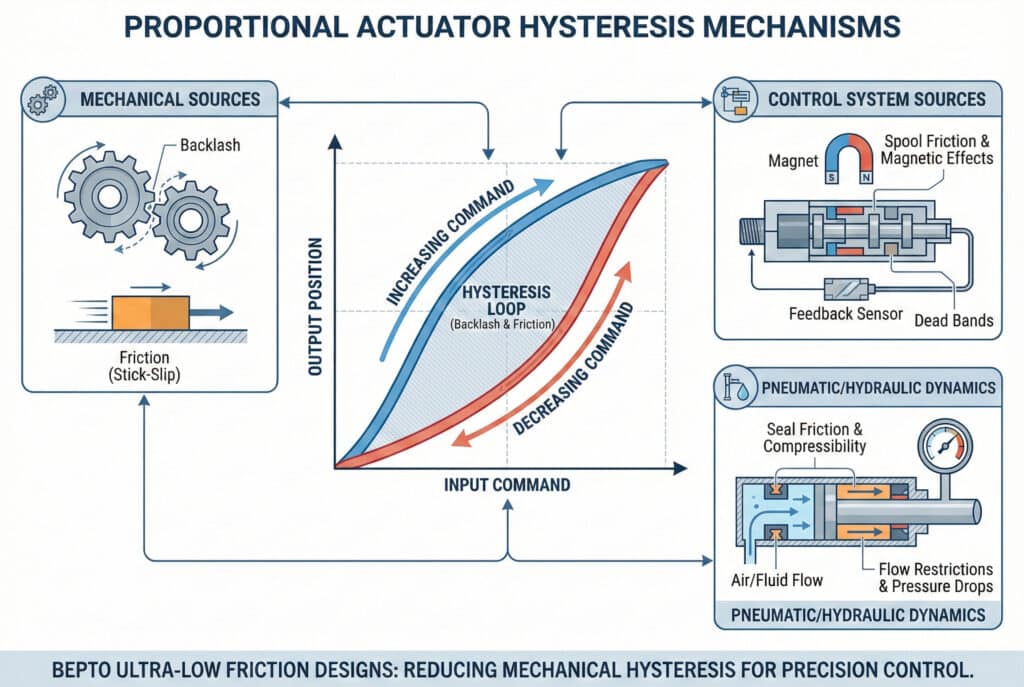
Grunnleggende hysterese-mekanismer
Mekaniske kilder
Fysiske komponenter bidrar betydelig til systemhysterese:
- Motreaksjon2: Gir, koblinger og tilkoblinger skaper døde soner
- Friksjon: Statiske og kinetiske friksjonsforskjeller forårsaker stick-slip-atferd
- Overholdelse: Elastisk deformasjon i mekaniske koblinger
- Slitasjemønster: Komponent slitasje skaper uregelmessige kontaktflater
Kontrollsystemkilder
Elektroniske og pneumatiske kontrollelementer tilfører hysterese:
| Komponenttype | Typisk hysterese | Primær årsak | Strategi for avbøtende tiltak |
|---|---|---|---|
| Servoventiler | 0.1-0.5% | Spolfriksjon | Høyfrekvent dither |
| Proporsjonale ventiler3 | 0.5-2% | Magnetisk hysterese | Tilbakemeldingskompensasjon |
| Posisjonssensorer | 0.05-0.2% | Elektronisk støy | Signal filtrering |
| Forsterkere | 0.1-0.3% | Innstillinger for dødbånd | Kalibreringsjustering |
Fysiske opprinnelser i pneumatiske systemer
Effekter av tetningsfriksjon
Pneumatiske tetninger skaper betydelige hysterese-kilder:
- Bruddfriksjon: Høyere kraft nødvendig for å sette i gang bevegelse
- Løpefriksjon: Lavere kraft under kontinuerlig bevegelse
- stick-slip-atferd4: Uregelmessig bevegelse ved lave hastigheter
- Temperaturavhengighet: Friksjonen endres med driftstemperaturen
Trykkdynamikk
Trykkpåvirkninger i pneumatiske systemer bidrar til hysterese:
- Kompressibilitet: Luftkompresjon skaper fjærlignende oppførsel
- Strømningsbegrensninger: Ventil- og tilpasningsbegrensninger forårsaker forsinkelser
- Trykkfall: Linjetap skaper posisjonsavhengige krefter
- Temperaturpåvirkning: Termisk ekspansjon påvirker systemets stivhet
Hos Bepto har vi utviklet våre stangløse sylindere med tetninger med ekstremt lav friksjon og presisjonsbearbeidede føresystemer som reduserer mekanisk hysterese med 60% sammenlignet med standarddesign – noe som er avgjørende for applikasjoner som krever høy presisjon og proporsjonal kontroll. 🎯
Lastavhengig hysterese
Effekter av variabel belastning
Eksterne belastninger har betydelig innvirkning på hystereseegenskapene:
- Gravitasjonsbelastninger: Posisjonsavhengige kraftvariasjoner
- Treghetsbelastninger: Akselerasjonsavhengige kraftkrav
- Prosessbelastninger: Variable ytre krefter under drift
- Friksjonsbelastninger: Variasjoner i overflatekontaktkraft
Dynamiske belastningsinteraksjoner
Bevegelige laster skaper komplekse hysterese-mønstre:
- Akselerasjonseffekter: Treghetskrefter ved hastighetsendringer
- Vibrasjonskobling: Eksterne vibrasjoner påvirker posisjoneringen
- Resonansinteraksjoner: Naturlig frekvens-eksitasjon
- Dempingsvariasjoner: Lastavhengige dempingsegenskaper
Hvordan påvirker hysterese ulike typer proporsjonale kontrollsystemer?
Hystereseeffekter varierer betydelig mellom ulike aktuatorteknologier og kontrollarkitekturer, og krever tilpassede kompensasjonsstrategier.
Åpne proporsjonale systemer opplever 5-15% hysteresefeil uten korreksjonsmulighet, mens lukkede systemer kan redusere hysteresen til 0,5-2% gjennom tilbakemeldingskompensasjon, med avanserte servosystemer som oppnår en nøyaktighet på under 0,1% ved hjelp av høyoppløselige kodere og sofistikerte kontrollalgoritmer.
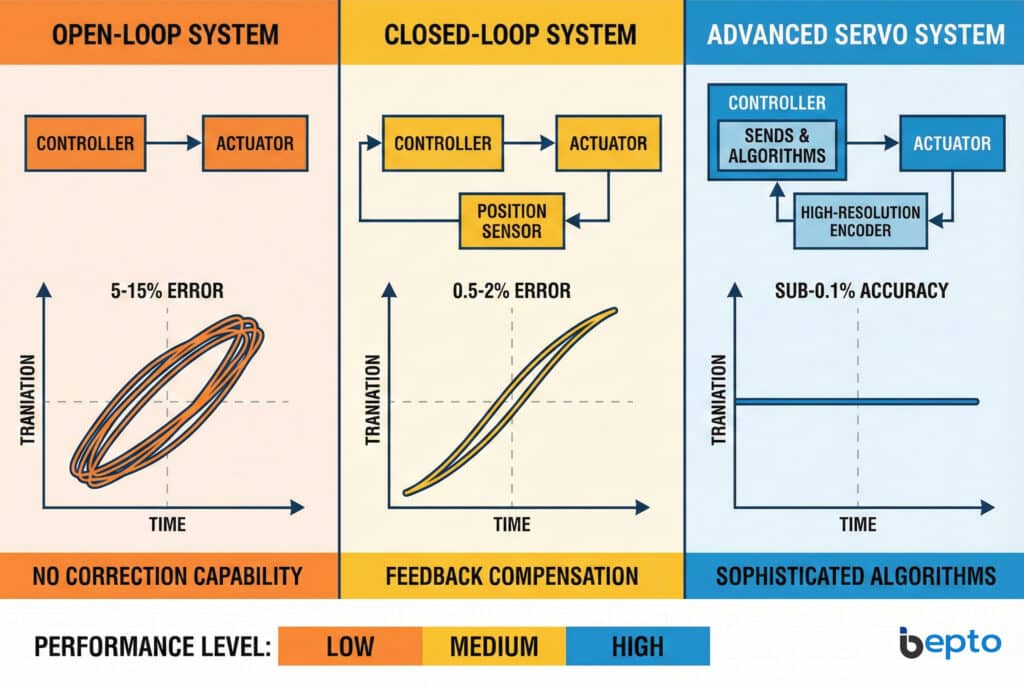
Åpne reguleringssystemer
Iboende begrensninger
Åpne systemer kan ikke kompensere for hystereseeffekter:
- Ingen tilbakemeldingskorreksjon: Feil akkumuleres uten å bli oppdaget
- Forutsigbare mønstre: Hysterese skaper repeterbare posisjoneringsfeil
- Temperaturfølsomhet: Ytelsen varierer avhengig av driftsforholdene.
- Lastavhengighet: Ulike belastninger skaper ulike hysterese-mønstre
Typiske ytelsesegenskaper
Hystereseytelsen til åpent sløyfesystem varierer avhengig av bruksområdet:
| Søknadstype | Hystereseområde | Akseptabel bruk | Ytelsesbegrensninger |
|---|---|---|---|
| Enkel posisjonering | 5-15% | Ikke-kritiske oppgaver | Dårlig repeterbarhet |
| Hastighetskontroll | 3-8% | Grov hastighetsregulering | Variabel ytelse |
| Styrkekontroll | 10-25% | Grunnleggende kraftapplikasjoner | Inkonsekvent utdata |
| Fleraksede systemer | 8-20% | Enkel automatisering | Kumulative feil |
Lukkede reguleringssystemer
Tilbakemeldingskompensasjon Fordeler
Lukkede systemer kan aktivt kompensere for hysterese:
- Feildeteksjon: Kontinuerlig posisjonsovervåking
- Sanntids korreksjon: Umiddelbar respons på posisjoneringsfeil
- Adaptiv kontroll: Læringsalgoritmer forbedrer ytelsen
- Avvisning av forstyrrelser: Kompensasjon for ytre krefter
Effektivitet av kontrollalgoritme
Ulike kontrollstrategier håndterer hysterese med varierende suksess:
- PID-regulering5: Grunnleggende kompensasjon, 2-5% gjenværende hysterese
- Feedforward-kontroll: Prediktiv kompensasjon, 1-3% residual
- Adaptiv kontroll: Læringskompensasjon, 0,5-2% rest
- Modellbasert kontroll: Teoretisk kompensasjon, 0,1-1% restverdi
Servostyringssystemer
Avanserte kompensasjonsteknikker
Høyytelsesservosystemer benytter sofistikert hysterese-kompensasjon:
- Hysterese-kartlegging: Systemkarakterisering og kompensasjonstabeller
- Forhåndsbelastningsteknikker: Mekanisk forspenning for å eliminere døde soner
- Dither-signaler: Høyfrekvent eksitasjon for å overvinne friksjon
- Prediktive algoritmer: Modellbasert hystereseforutsigelse
Michael, en robotingeniør ved en presisjonsfabrik i North Carolina, implementerte våre anbefalte servostyringsoppgraderinger på sin samlebånd. Hans posisjoneringsnøyaktighet forbedret seg fra ±2,5 mm til ±0,3 mm, noe som reduserte produktfeilene med 75% og sparte $50 000 dollar i månedlige omarbeidingskostnader. 🤖
Utfordringer med flerakset system
Kumulative effekter
Flere aktuatorer forsterker hysterese-problemer:
- Feilakkumulering: Individuelle aksefeil kombineres
- Koblingseffekter: Aksens interaksjoner skaper komplekse mønstre
- Synkroniseringsproblemer: Ulike hysterese-mønstre forårsaker koordineringsproblemer
- Kalibreringskompleksitet: Flere systemer krever individuell innstilling
Koordinasjonsstrategier
Avanserte fleraksede systemer bruker spesialiserte teknikker:
- Master-slave-kontroll: Én akse leder, andre følger etter
- Krysskoblingskompensasjon: Korrigering av akseinteraksjon
- Synkronisert posisjonering: Koordinert bevegelsesprofiler
- Global optimalisering: Systemomfattende ytelsesoptimalisering
Hvilke måleteknikker identifiserer og kvantifiserer hystereseeffekter best?
Nøyaktig måling og karakterisering av hysterese muliggjør utvikling av effektive kompensasjonsstrategier og systemoptimalisering.
Hysterese-måling krever toveis posisjoneringstester med høyoppløselige kodere, registrering av posisjon versus kommandoforhold gjennom komplette sykluser, analyse av sløyfebredde og asymmetrimønstre, samt dokumentering av temperatur- og belastningsavhengigheter for å lage omfattende kompensasjonskart for optimal kontrollytelse.
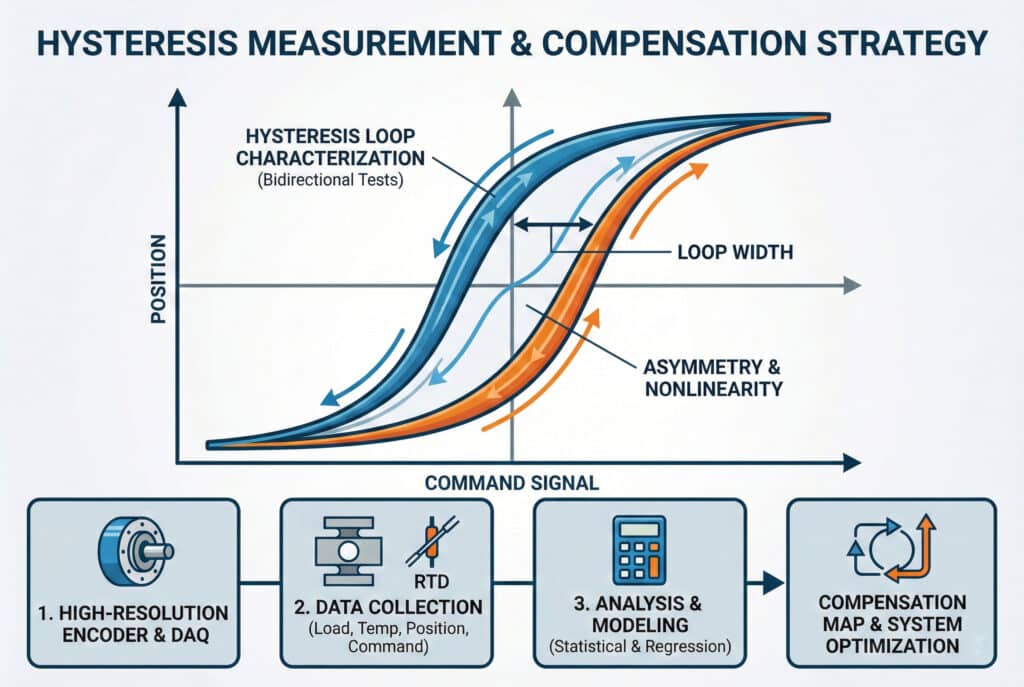
Standard måleprotokoller
Toveis posisjoneringstester
Omfattende karakterisering av hysterese krever systematisk testing:
- Fullstendige slaglengder: Fullføre utvidelses- og tilbaketrekningssekvenser
- Flere hastigheter: Ulike hastighetsprofiler for å identifisere hastighetsavhengigheter
- Lastvariasjoner: Ulike eksterne belastninger for å kartlegge belastningseffekter
- Temperaturområder: Vurdering av virkningen av driftstemperatur
Krav til datainnsamling
Nøyaktig måling av hysterese krever instrumenter av høy kvalitet:
| Måleparameter | Nødvendig oppløsning | Typisk utstyr | Nøyaktighetsmål |
|---|---|---|---|
| Tilbakemelding på posisjon | 0,01% slag | Lineær enkoder | ±0,005% |
| Kommandosignal | 12-bit minimum | DAQ-system | ±0,1% |
| Lastmåling | 1% nominell kraft | Lastcelle | ±0,5% |
| Temperatur | ±1°C | RTD-sensor | ±0.5°C |
Analyseteknikker
Karakterisering av hysterese-sløyfe
Matematisk analyse avslører hystereseegenskaper:
- Sløyfebredde: Maksimal posisjonsforskjell ved samme kommando
- Asymmetri: Retningsbestemt skjevhet i posisjoneringsfeil
- Ikke-linearitet: Avvik fra ideell lineær respons
- Repeterbarhet: Konsistens gjennom flere sykluser
Statistiske analysemetoder
Avanserte analyseteknikker kvantifiserer hystereseeffekter:
- Standardavvik: Måling av posisjoneringsgjentakbarhet
- Korrelasjonsanalyse: Inngangs-utgangsforholdets styrke
- Frekvensanalyse: Dynamiske responsegenskaper
- Regresjonsanalyse: Utvikling av matematiske modeller
Systemer for sanntidsovervåking
Kontinuerlig hysterese-sporing
Produksjonssystemer drar nytte av kontinuerlig hystereseovervåking:
- Innebygde sensorer: Innebygde posisjonsfeedbacksystemer
- Datalogging: Kontinuerlig ytelsesregistrering
- Trendanalyse: Sporing av langsiktig ytelsesforringelse
- Prediktivt vedlikehold: Tidlig varsling om slitasje på komponenter
Våre Bepto-diagnosesystemer inkluderer sanntids hystereseovervåking som varsler operatørene når posisjoneringsfeil overskrider 0,5%-terskelverdier, slik at proaktivt vedlikehold kan utføres før presisjonen forringes til uakseptable nivåer. 📊
Miljøkonsekvensvurdering
Temperaturpåvirkning
Temperaturen har betydelig innflytelse på hystereseegenskapene:
- Termisk ekspansjon: Mekaniske dimensjonsendringer
- Viskositetsendringer: Variasjoner i væskeegenskaper
- Materialegenskaper: Elastisitetsmodulens temperaturavhengighet
- Tetningens ytelse: Variasjoner i friksjonskoeffisient
Lastavhengighetsanalyse
Eksterne belastninger skaper komplekse hysterese-mønstre:
- Statiske belastninger: Effekter av konstant kraft på posisjonering
- Dynamiske belastninger: Variabel kraftpåvirkning under bevegelse
- Treghetseffekter: Akselerasjonsavhengige posisjoneringsfeil
- Friksjonsvariasjoner: Overflatens tilstand påvirker ytelsen
Hva er de mest effektive metodene for å minimere hysterese i systemet ditt?
Implementering av omfattende strategier for reduksjon av hysterese kan oppnå posisjoneringsnøyaktighet under 1% i krevende proporsjonale kontrollapplikasjoner.
Effektiv minimering av hysterese kombinerer mekaniske forbedringer, inkludert komponenter med lav friksjon og eliminering av tilbakeslag, forbedringer av kontrollsystemet med feedforward-kompensasjon og adaptive algoritmer, samt miljøkontroller for temperatur- og laststabilitet, noe som typisk reduserer hysteresen fra 5-15% til under 1% av full skala.
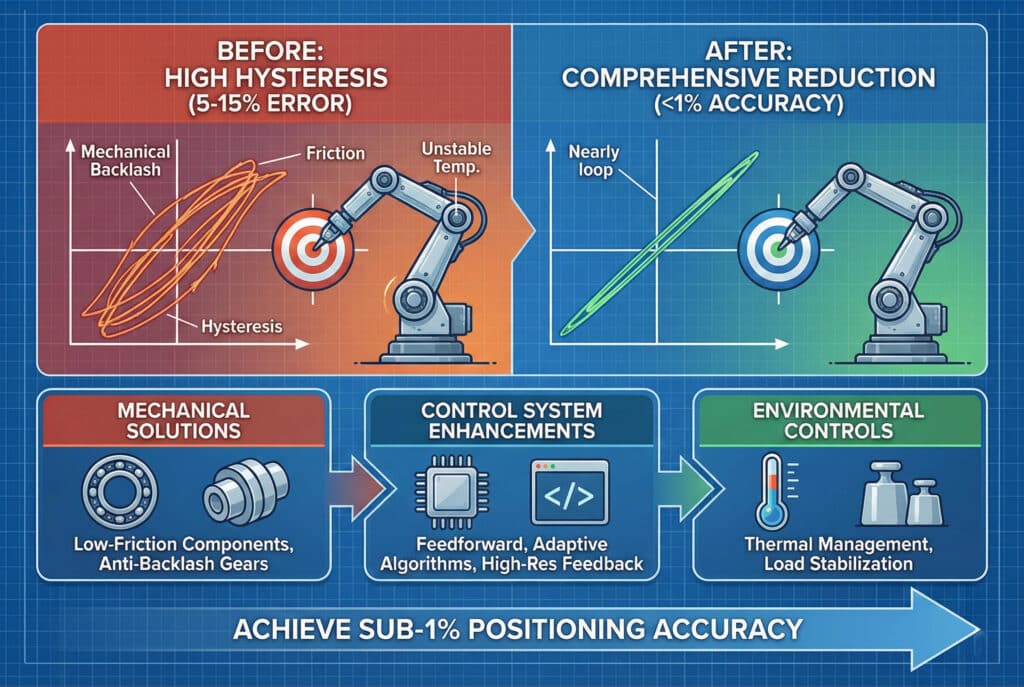
Mekaniske løsninger
Komponentvalg og design
Velg komponenter som er spesielt utviklet for lav hysterese:
- Presisjonslager: Lineære føringer av høy kvalitet med minimalt slark
- Tetninger med lav friksjon: Avanserte tetningsmaterialer og -design
- Stive koblinger: Eliminer mekaniske kilder til tilbakeslag
- Forhåndsinstallerte systemer: Mekanisk forspenning for å eliminere døde soner
Forbedringer av systemarkitekturen
Design mekaniske systemer for å minimere hysterese-kilder:
| Designfunksjon | Reduksjon av hysterese | Implementeringskostnader | Påvirkning av vedlikehold |
|---|---|---|---|
| Direkte drift | 80-90% | Høy | Lav |
| Forhåndsinnlastede guider | 60-70% | Medium | Medium |
| Presisjonskoblinger | 40-50% | Lav | Lav |
| Gir mot tilbakeslag | 70-80% | Medium | Høy |
Forbedringer av kontrollsystemet
Programvarekompensasjonsteknikker
Avanserte kontrollalgoritmer kan redusere hystereseeffekter betydelig:
- Hysterese-kartlegging: Oppslagstabeller for posisjonskorrigering
- Feedforward-kontroll: Prediktiv kompensasjon basert på kommandoretning
- Adaptive algoritmer: Selvlærende hysterese-kompensasjon
- Modellbasert kontroll: Fysikkbasert hysterese-prediksjon
Forbedringer av tilbakemeldingssystemet
Forbedrede tilbakemeldingssystemer muliggjør bedre hysterese-kompensasjon:
- Kodere med høyere oppløsning: Forbedret nøyaktighet ved posisjonsmåling
- Flere tilbakemeldingssensorer: Redundant posisjonsmåling
- Hastighetsfeedback: Rente-baserte kompensasjonsalgoritmer
- Krafttilbakemelding: Lastavhengig hysterese-kompensasjon
Strategier for miljøkontroll
Temperaturstyring
Stabile driftstemperaturer reduserer hysteresevariasjoner:
- Varmeisolering: Beskytt aktuatorer mot temperatursvingninger
- Aktiv kjøling: Oppretthold jevne driftstemperaturer
- Temperaturkompensasjon: Programvarekorreksjon for termiske effekter
- Termisk forbehandling: La systemene nå termisk likevekt
Laststabilisering
Konsistente belastningsforhold minimerer hysteresevariasjoner:
- Lastisolering: Koble fra eksterne forstyrrelser
- Motvekt: Reduser effekten av gravitasjonsbelastning
- Vibrasjonsdemping: Minimer dynamiske belastningsvariasjoner
- Prosessoptimalisering: Reduser variable ytre krefter
Sarah, prosessingeniør ved et farmasøytisk pakkeanlegg i Colorado, implementerte vårt omfattende program for reduksjon av hysterese. Nøyaktigheten i tablettellinga hennes forbedret seg fra 98,51 TP3T til 99,81 TP3T, noe som oppfyller FDA-kravene og samtidig reduserer avfallet med 1 TP4T25 000 per måned. 💊
Avanserte kompensasjonsteknikker
Dither-signal-applikasjon
Høyfrekvent eksitasjon kan overvinne friksjonsbasert hysterese:
- Frekvensvalg: Velg frekvenser over systemets båndbredde
- Amplitudeoptimalisering: Balansere effektivitet med systemstabilitet
- Bølgeformdesign: Sinusformede, trekantede eller tilfeldige signaler
- Implementeringsmetoder: Hardware- eller programvaregenerering
Prediktive kontrollmetoder
Modellbaserte tilnærminger gir overlegen hysterese-kompensasjon:
- Systemidentifikasjon: Utvikling av matematiske modeller
- Kalman-filtrering: Optimal tilstandsvurdering
- Modellprediktiv kontroll: Optimalisering av fremtidig tilstand
- Adaptiv modellering: Oppdateringer av modellparametere i sanntid
Vedlikehold og kalibrering
Regelmessige kalibreringsprosedyrer
Systematisk kalibrering opprettholder lav hystereseytelse:
- Periodisk hysterese-kartlegging: Dokumentere endringer i ytelse
- Komponentinspeksjon: Identifisere slitasjerelatert forringelse
- Smøring vedlikehold: Oppretthold optimale friksjonsnivåer
- Verifisering av justering: Sikre mekanisk presisjon
Strategier for forebyggende vedlikehold
Proaktivt vedlikehold forhindrer hystereseforringelse:
- Utviklingen i ytelse: Spor hystereseendringer over tid
- Sporing av komponenters levetid: Skift ut komponenter før de svikter
- Tilstandsovervåking: Kontinuerlig vurdering av systemets tilstand
- Forebyggende utskifting: Planlegg vedlikehold basert på bruk
Hos Bepto oppnår våre hysterese-reduksjonspakker vanligvis en forbedring på 70-85% i posisjoneringsnøyaktighet, og mange kunder rapporterer om hysteresenivåer under 0,5% i sine mest krevende applikasjoner – en ytelse som direkte gir høyere produktkvalitet og redusert avfall. 🎯
Konklusjon
Forståelse og kontroll av hysterese er avgjørende for å oppnå presis proporsjonal aktuatorstyring, noe som krever systematisk måling, målrettet kompensasjon og kontinuerlig vedlikehold for optimal ytelse.
Vanlige spørsmål om hysterese i proporsjonal aktuatorstyring
Spørsmål: Hva regnes som akseptabel hysterese i proporsjonale aktuatorsystemer?
Akseptabel hysterese avhenger av bruksområdet: generell automatisering tåler 2-5%, presisjonsmontering krever under 1%, og ultrapresise bruksområder krever hysteresenivåer under 0,5%. Våre Bepto-systemer oppnår vanligvis 0,3-0,8% hysterese ved riktig implementering.
Spørsmål: Kan programvarekompensasjon eliminere mekanisk hysterese fullstendig?
Programvarekompensering kan redusere hysterese med 60-80%, men kan ikke helt eliminere mekaniske kilder som tilbakeslag og friksjon. Ved å kombinere mekaniske forbedringer med programvarekompensering oppnås de beste resultatene, vanligvis under 1% total systemhysterese.
Spørsmål: Hvor ofte bør jeg kalibrere det proporsjonale kontrollsystemet mitt for hysterese?
Kalibreringsfrekvensen avhenger av bruksintensitet og presisjonskrav: systemer med høy presisjon må kalibreres månedlig, generelle applikasjoner krever kvartalsvise kontroller, og systemer med lav presisjon kan kalibreres årlig med kontinuerlig ytelsesovervåking.
Spørsmål: Hva er forskjellen mellom hysterese og tilbakeslag i aktuatorsystemer?
Backlash er mekanisk slark i koblinger og tannhjul, mens hysterese omfatter alle posisjonsavhengige effekter, inkludert friksjon, magnetiske effekter og dødbånd i kontrollsystemet. Backlash er en komponent i systemets totale hysterese.
Spørsmål: Hvordan vet jeg om hysterese er årsaken til posisjoneringsproblemene mine?
Hysterese skaper karakteristiske mønstre: konsistente posisjoneringsfeil som avhenger av tilnærmingsretning, ulik nøyaktighet ved opp- og nedbevegelse og repeterbare feilmønstre. Toveis posisjoneringstester avdekker hysterese-sløyfer som bekrefter diagnosen.
-
Lær om de fysiske prinsippene for hysterese og dens innvirkning på nøyaktigheten i ulike ingeniørfag. ↩
-
Forstå årsakene til og tekniske løsninger for å eliminere tilbakeslag i mekaniske koblinger. ↩
-
Utforsk den interne mekanikken og driftsprinsippene til proporsjonale pneumatiske reguleringsventiler. ↩
-
Oppdag mekanikken bak stick-slip-fenomenet og hvordan det påvirker bevegelsen til aktuatorer med lav hastighet. ↩
-
Få en dypere forståelse av PID-reguleringsteori og dens anvendelse i industriell automatisering. ↩
