

Standardowe siłowniki dwupołożeniowe ograniczają elastyczność automatyzacji, zmuszając inżynierów do korzystania ze złożonych systemów mechanicznych lub drogich rozwiązań. rozwiązania serwo1, zwiększając koszty o 200-400% i zwiększając złożoność konserwacji. Siłowniki wielopozycyjne osiągają pośrednie zatrzymania dzięki mechanicznym zapadkom, pneumatycznemu sekwencjonowaniu lub elektronicznym systemom kontroli położenia, które precyzyjnie lokalizują tłok w z góry określonych pozycjach wzdłuż długości skoku, umożliwiając złożone sekwencje automatyzacji za pomocą pojedynczych siłowników. W zeszłym tygodniu pomogłem Marcusowi, inżynierowi opakowań z Wisconsin, którego system sortowania wymagał trzech różnych pozycji, ale zmagał się ze złożonością i kosztami wielu układów cylindrów. 🎯
Spis treści
- Jakie są różne rodzaje technologii siłowników wielopozycyjnych?
- W jaki sposób mechaniczne systemy detekcji zapewniają niezawodną kontrolę położenia?
- Dlaczego siłowniki wielopozycyjne Bepto są najlepszym wyborem do kompleksowej automatyzacji?
Jakie są różne rodzaje technologii siłowników wielopozycyjnych?
Zrozumienie różnych technologii siłowników wielopozycyjnych pomaga inżynierom wybrać optymalne rozwiązanie dla ich specyficznych wymagań w zakresie automatyzacji i precyzji.
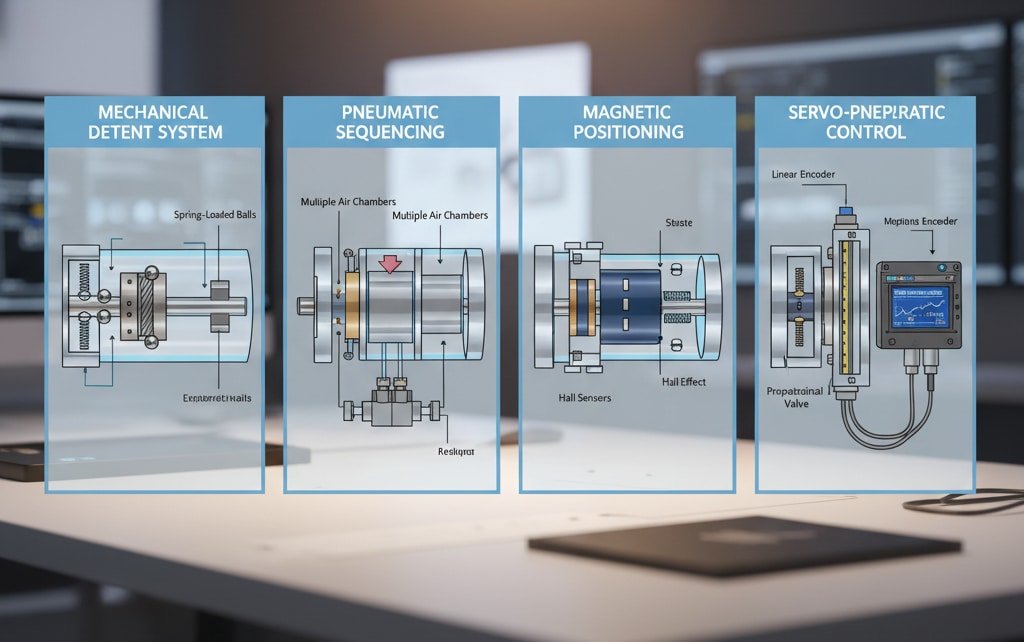
Siłowniki wielopozycyjne wykorzystują mechaniczne systemy zatrzymujące z kulkami sprężynowymi, sekwencjonowanie pneumatyczne z wieloma komorami powietrznymi, pozycjonowanie magnetyczne z czujnikami Halla lub sterowanie serwo-pneumatyczne z elektronicznym sprzężeniem zwrotnym w celu uzyskania precyzyjnych zatrzymań pośrednich wzdłuż skoku siłownika.
Mechaniczne systemy detekcji
Sprężynowe zatrzaski kulkowe:
- Precyzyjnie wykonane rowki w tłoczysku
- Kulki sprężynowe zatrzaskują się w pozycjach zatrzaskowych
- Możliwość mechanicznego sterowania awaryjnego
- Do utrzymywania pozycji nie jest wymagane zasilanie zewnętrzne
Zatrzaski krzywkowe:
- Obrotowy mechanizm krzywkowy steruje wyborem pozycji
- Wiele pozycji zatrzymania na obrót
- Wysoka siła trzymania
- Odpowiedni do ciężkich zastosowań
Zatrzaski klinowe:
- Stożkowe elementy klinowe zapewniają pozycjonowanie
- Samoblokująca się konstrukcja zapobiega dryfowaniu
- Wysoka precyzja i powtarzalność
- Kompaktowa konstrukcja dla aplikacji o ograniczonej przestrzeni
Pneumatyczne systemy sekwencjonowania
Konstrukcja z wieloma komorami:
- Oddzielne komory powietrzne dla każdej pozycji
- Sekwencyjne sterowanie zaworem w celu wyboru pozycji
- Niezależna kontrola ciśnienia w każdej komorze
- Płynne przejścia między pozycjami
Sekwencjonowanie pilotażowe:
- Małe siłowniki pilotowe sterują pozycjami siłowników głównych
- Zmniejszone zużycie powietrza w porównaniu z komorą wielokomorową
- Szybszy czas reakcji
- Niższy koszt niż w przypadku pełnych systemów wielokomorowych
Elektroniczna kontrola położenia
| Typ technologii | Dokładność pozycji | Czas reakcji | Wymagania dotyczące zasilania | Typowe zastosowania |
|---|---|---|---|---|
| Mechaniczna blokada | ±0,1 mm | 0,5-1,0 s | Brak | Montaż, sortowanie |
| Sekwencja pneumatyczna | ±0,5 mm | 0,3-0,8 s | Sprężone powietrze | Obsługa materiałów |
| Pozycja magnetyczna | ±0,05 mm | 0,2-0,5 s | 24 V DC | Precyzyjny montaż |
| Servo-Pneumatic | ±0,01 mm | 0,1-0,3 s | 24 V DC + sprzężenie zwrotne | Aplikacje o wysokiej precyzji |
Technologia pozycjonowania magnetycznego
- Bezdotykowe wykrywanie położenia
- Wiele celów magnetycznych na tłoku
- Elektroniczna weryfikacja pozycji
- Programowalne punkty położenia
Układy przełączników kontaktronowych:
- Proste wykrywanie pozycji włączenia/wyłączenia
- Wiele przełączników wzdłuż długości cylindra
- Ekonomiczne rozwiązanie do podstawowego pozycjonowania
- Niezawodność w trudnych warunkach
Integracja serwo-pneumatyczna
Systemy sprzężenia zwrotnego:
- Enkodery liniowe3 dostarczają precyzyjnych danych o położeniu
- Sterowanie w zamkniętej pętli zapewniające dokładność
- Programowalne pozycje pośrednie
- Możliwość dynamicznej regulacji położenia
Proporcjonalne sterowanie zaworem:
- Zmienna kontrola przepływu dla płynnego pozycjonowania
- Elektroniczna regulacja ciśnienia
- Programowanie wielopozycyjne
- Integracja z Systemy PLC4
Aplikacja pakowania Marcusa doskonale pokazała potrzebę zastosowania technologii wielopozycyjnej. Jego system wymagał trzech precyzyjnych pozycji: odbioru produktu (25 mm), stacji kontroli (75 mm) i ostatecznego umieszczenia (125 mm). Tradycyjne rozwiązania wymagałyby trzech oddzielnych siłowników lub złożonych połączeń mechanicznych. Nasz mechaniczny siłownik detekcyjny Bepto zapewniał wszystkie trzy pozycje w jednym, niezawodnym urządzeniu! 📦
W jaki sposób mechaniczne systemy detekcji zapewniają niezawodną kontrolę położenia?
Mechaniczne systemy zatrzaskowe oferują solidne, niezależne od zasilania pozycjonowanie dzięki precyzyjnie zaprojektowanym interfejsom mechanicznym, które blokują cylinder w określonych pozycjach.
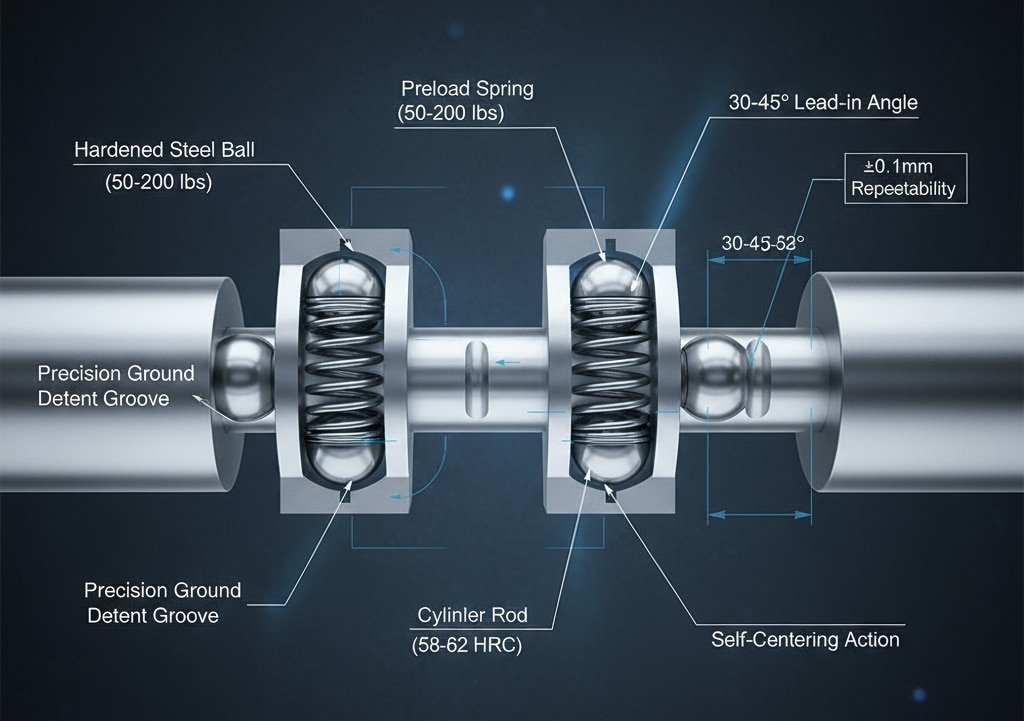
Mechaniczne systemy zatrzaskowe wykorzystują obciążone sprężyną kulki lub kliny, które łączą się z precyzyjnie wykonanymi rowkami lub wycięciami w pręcie cylindra, zapewniając dodatnią blokadę mechaniczną w pozycjach pośrednich z wysoką powtarzalnością i siłą trzymania bez konieczności stosowania zewnętrznego zasilania lub złożonych elementów sterujących.
Konstrukcja mechanizmu blokującego
Konfiguracja zatrzasku kulowego:
- Hartowane kulki stalowe (zazwyczaj o średnicy 6-12 mm)
- Siła napięcia wstępnego sprężyny 50-200 funtów
- Precyzyjnie szlifowane rowki zatrzaskowe
- Samocentrowanie zapewnia powtarzalność
Geometria zaangażowania:
- Kąty wprowadzenia 30-45 stopni dla płynnego załączania
- Profil rowka o pełnym promieniu zapewnia maksymalny kontakt
- Hartowane powierzchnie (58-62 HRC) zapewniające odporność na zużycie
- Odpowiednie odstępy zapewniające niezawodne działanie
Dokładność i powtarzalność pozycji
Precyzja mechaniczna:
- Tolerancja obróbki rowków ±0,025 mm
- Tolerancja średnicy kulki ±0,0025 mm
- Spójność siły sprężyny ±5%
- Powtarzalność pozycji całkowitej ±0,1 mm
Czynniki wpływające na dokładność:
- Tolerancje produkcyjne elementów detekcyjnych
- Wzorce zużycia podczas długotrwałej pracy
- Zmiany obciążenia wpływające na siłę załączania
- Wpływ temperatury na wymiary materiału
Analiza siły i moc trzymania
Siły zaangażowania:
- Napięcie wstępne sprężyny określa siłę załączania
- Obszar kontaktu kulki z podłożem wpływa na rozkład naprężeń
- Geometria rowka wpływa na siłę trzymania
- Siła wymuszenia zazwyczaj 2-3 razy większa od siły załączenia
Obliczenia siły trzymania:
- Osiowa siła trzymająca = Siła sprężyny × sin(kąt rowka)
- Współczynnik bezpieczeństwa typowo 3:1 dla obciążeń dynamicznych
- Kompensacja temperaturowa zmian siły sprężyny
- Weryfikacja nośności poprzez testy
Warianty konstrukcyjne i konfiguracje
| Typ zatrzasku | Dostępne stanowiska | Siła trzymania | Siła nadpisania | Najlepsze aplikacje |
|---|---|---|---|---|
| Zatrzask kulowy | 2-8 pozycji | 100-500 funtów | 200-1000 funtów | Ogólna automatyzacja |
| Blokada klinowa | 2-4 pozycje | 500-2000 funtów | 1000-4000 funtów | Aplikacje do dużych obciążeń |
| Zatrzask krzywki | 3-12 pozycji | 200-800 funtów | 400-1600 funtów | Procesy wieloetapowe |
| Zatrzask magnetyczny | 2-6 pozycji | 50-300 funtów | 100-600 funtów | Czyste środowisko |
Procedury instalacji i regulacji
Konfiguracja początkowa:
- Weryfikacja dopasowania pozycji zatrzasku do wymagań aplikacji
- Wyreguluj napięcie wstępne sprężyny, aby uzyskać odpowiednią siłę załączania
- Test siły wymuszenia dla trybu awaryjnego
- Dokumentacja ustawień pozycji dla celów konserwacji
Wymagania dotyczące konserwacji:
- Okresowa kontrola zużycia rowka zatrzasku
- Wiosenna coroczna weryfikacja siły
- Smarowanie elementów ruchomych
- Wymiana zużytych elementów zatrzaskowych
Rozwiązywanie typowych problemów
Dryft pozycji:
- Sprawdź ślady zużycia rowka zatrzasku
- Sprawdź specyfikację siły sprężyny
- Sprawdzić pod kątem zanieczyszczeń w mechanizmie zatrzaskowym
- Ocena warunków obciążenia a siła trzymania
Problemy z zaangażowaniem:
- Sprawdź zużycie kulki lub klina
- Sprawdź wykończenie powierzchni rowka
- Sprawdzić prawidłowe smarowanie
- Ocena dopasowania między komponentami
Względy środowiskowe
Wpływ temperatury:
- Zmiana siły sprężyny w zależności od temperatury
- Rozszerzalność cieplna elementów detekcyjnych
- Wybór materiału dla zakresu temperatur
- Techniki kompensacji dla ekstremalnych warunków
Ochrona przed zanieczyszczeniami:
- Uszczelnione mechanizmy zatrzaskowe dla brudnych środowisk
- Wymagania dotyczące filtracji doprowadzanego powietrza
- Osłony ochronne komponentów zewnętrznych
- Procedury czyszczenia na potrzeby konserwacji
Jennifer, projektantka maszyn z Karoliny Północnej, potrzebowała niezawodnego pozycjonowania dla swojego uchwytu spawalniczego, który pracował w trudnym środowisku produkcyjnym. Standardowe pneumatyczne systemy pozycjonowania zawodziły z powodu zanieczyszczeń i przerw w zasilaniu. Nasz mechaniczny system zatrzaskowy zapewniał spójne pozycjonowanie niezależnie od stanu zasilania i okazał się odporny na środowisko spawalnicze. zakłócenia elektromagnetyczne5! ⚡
Dlaczego siłowniki wielopozycyjne Bepto są najlepszym wyborem do kompleksowej automatyzacji?
Nasza zaawansowana technologia siłowników wielopozycyjnych łączy w sobie precyzyjną inżynierię, elastyczne opcje konfiguracji i ekonomiczne rozwiązania w celu uproszczenia złożonych wyzwań automatyzacji.
Siłowniki wielopozycyjne Bepto charakteryzują się precyzyjnie wykonanymi systemami odłączania, konfigurowalnymi konfiguracjami pozycji, solidną konstrukcją do środowisk przemysłowych i kompleksowym wsparciem technicznym, zapewniając niezawodne działanie wielopozycyjne przy 60% niższych kosztach niż alternatywne serwomechanizmy, przy jednoczesnym zachowaniu doskonałej dokładności i trwałości.
Zaawansowane funkcje inżynieryjne
Precyzyjna produkcja:
- Rowki mocujące obrabiane CNC z tolerancją ±0,01 mm
- Hartowane i szlifowane powierzchnie zatrzasków (60+ HRC)
- Precyzyjnie dopasowane zespoły sprężyn
- Sprawdzona pod względem jakości powtarzalność pozycji
Możliwości dostosowywania:
- Dostępne konfiguracje od 2 do 8 pozycji
- Niestandardowy rozstaw pozycji od 10 mm do 500 mm
- Zmienna siła trzymania od 50 do 2000 funtów
- Specjalne materiały do pracy w trudnych warunkach
Opcje konfiguracji i elastyczność
Konfiguracje standardowe:
- Cylindry 3-pozycyjne (najpopularniejsze)
- Równe odstępy lub niestandardowe odstępy między pozycjami
- Różne rozmiary otworów od 1,5″ do 8″
- Długość skoku do 60 cali
Rozwiązania niestandardowe:
- Asymetryczne odstępy między pozycjami
- Zmienne siły zatrzymania na pozycję
- Specjalne konfiguracje montażowe
- Zintegrowane czujniki i systemy sprzężenia zwrotnego
Specyfikacje wydajności
| Otwór cylindra | Maksymalne pozycje | Dokładność pozycji | Siła trzymania | Ciśnienie robocze |
|---|---|---|---|---|
| 1,5″ (40 mm) | 6 pozycji | ±0,1 mm | 200 funtów | 80-150 PSI |
| 2,5″ (63 mm) | 8 pozycji | ±0,1 mm | 400 funtów | 80-150 PSI |
| 4″ (100 mm) | 6 pozycji | ±0,05 mm | 800 funtów | 80-150 PSI |
| 6″ (160 mm) | 4 pozycje | ±0,05 mm | 1500 funtów | 80-150 PSI |
Zalety w zakresie jakości i niezawodności
Standardy testowania:
- Testy żywotności 5 milionów cykli
- Weryfikacja powtarzalności pozycji
- Walidacja siły trzymania
- Testy wytrzymałości środowiskowej
Cechy niezawodności:
- Uszczelnione mechanizmy zatrzaskowe
- Materiały odporne na korozję
- Sprężyny stabilne temperaturowo
- Konstrukcja odporna na zanieczyszczenia
Analiza kosztów i efektywności
Początkowe oszczędności inwestycyjne:
- 60% niższy koszt niż w przypadku systemów serwo-pneumatycznych
- 40% mniej niż układy z wieloma cylindrami
- Mniejsza złożoność instalacji
- Niższe wymagania dotyczące systemu sterowania
Korzyści związane z kosztami operacyjnymi:
- Do utrzymywania pozycji nie jest wymagane zasilanie zewnętrzne
- Minimalne wymagania konserwacyjne
- Zmniejszone zapasy części zamiennych
- Niższe zużycie energii
Wsparcie techniczne i usługi
Pomoc inżynieryjna:
- Analiza zastosowania i dobór rozmiaru cylindra
- Niestandardowy projekt konfiguracji pozycji
- Wskazówki dotyczące instalacji i konfiguracji
- Wsparcie w zakresie rozwiązywania problemów i optymalizacji
Dokumentacja i szkolenia:
- Kompleksowe instrukcje instalacji
- Dokumentacja procedury konserwacji
- Programy szkoleń technicznych
- Zasoby wsparcia online
Integracja i kompatybilność
Integracja systemu sterowania:
- Kompatybilny ze standardowymi zaworami pneumatycznymi
- Opcjonalne czujniki sprzężenia zwrotnego położenia
- Możliwości integracji ze sterownikami PLC
- Standardowe przemysłowe interfejsy montażowe
Zastosowania modernizacyjne:
- Bezpośrednia wymiana istniejących cylindrów
- Kompatybilność montażowa z głównymi markami
- Opcje gwintu portu (NPT, G, M5)
- Dostępne niestandardowe rozwiązania adapterów
Historie sukcesu i zastosowania
Sprawdzone zastosowania:
- Systemy pozycjonowania linii montażowej
- Sprzęt do obsługi materiałów
- Automatyzacja maszyn pakujących
- Sprzęt do testowania i kontroli
Wyniki klientów:
- 95% redukcja złożoności systemu pozycjonowania
- 80% poprawa spójności czasu cyklu
- 70% zmniejszenie wymagań konserwacyjnych
- Powtarzalność pozycji 99,9%
Nasza technologia siłowników wielopozycyjnych zrewolucjonizowała automatyzację u ponad 800 klientów na całym świecie, eliminując potrzebę stosowania złożonych systemów mechanicznych i zapewniając precyzyjne pozycjonowanie przy kosztach siłowników pneumatycznych. Nie tylko produkujemy siłowniki - projektujemy kompletne rozwiązania pozycjonujące, które upraszczają automatyzację i zwiększają produktywność! 🚀
Wnioski
Siłowniki wielopozycyjne eliminują złożone systemy mechaniczne i drogie rozwiązania serwo, zapewniając precyzyjne pozycjonowanie pośrednie z prostym sterowaniem pneumatycznym i niezawodnym działaniem mechanicznym.
Najczęściej zadawane pytania dotyczące siłowników wielopozycyjnych
P: Ile pozycji może zapewnić pojedynczy cylinder wielopozycyjny?
Siłowniki wielopozycyjne Bepto mogą zapewnić od 2 do 8 różnych pozycji w zależności od rozmiaru otworu i długości skoku. Większość aplikacji wykorzystuje 3-4 pozycje dla optymalnej równowagi między funkcjonalnością i niezawodnością, z niestandardowymi konfiguracjami dostępnymi dla określonych wymagań.
P: Co się stanie, jeśli siłownik utknie między pozycjami?
Nasze mechaniczne systemy zatrzaskowe posiadają funkcję nadpisywania, która umożliwia ręczne lub pneumatyczne przesunięcie siłownika do następnej pozycji. Sprężynowa konstrukcja zatrzasku naturalnie prowadzi tłok do najbliższej stabilnej pozycji podczas pracy.
P: Czy siłowniki wielopozycyjne mogą przenosić takie same obciążenia jak siłowniki standardowe?
Tak, wielopozycyjne siłowniki Bepto utrzymują pełną siłę we wszystkich pozycjach. Mechanizm zatrzaskowy zwiększa siłę trzymania, a nie ją zmniejsza, z siłą trzymania w zakresie od 200 do 2000 funtów w zależności od konfiguracji.
P: Jak zaprogramować różne pozycje w istniejącym systemie sterowania?
Siłowniki wielopozycyjne współpracują ze standardowymi zaworami pneumatycznymi i regulatorami czasowymi. Każda pozycja wymaga określonej sekwencji zaworów i synchronizacji. Zapewniamy szczegółowe instrukcje programowania i możemy pomóc w integracji systemu sterowania dla konkretnego zastosowania.
P: Jaka konserwacja jest wymagana w przypadku wielopozycyjnych systemów detekcji siłowników?
Konserwacja jest minimalna - coroczna kontrola zatrzaśnięcia, okresowe smarowanie ruchomych części i weryfikacja dokładności pozycji. Konstrukcja mechaniczna eliminuje elementy elektroniczne, które wymagają częstej kalibracji lub wymiany.
-
Dowiedz się, w jaki sposób serwosystemy zapewniają precyzyjne sterowanie ruchem w automatyce przemysłowej. ↩
-
Poznaj zasady działania czujników Halla i ich zastosowanie w pozycjonowaniu bezdotykowym. ↩
-
Dowiedz się, w jaki sposób enkodery liniowe zapewniają precyzyjne sprzężenie zwrotne pozycji w systemach sterowania w pętli zamkniętej. ↩
-
Zrozumienie roli programowalnych sterowników logicznych (PLC) w zarządzaniu i automatyzacji procesów przemysłowych. ↩
-
Przeczytaj o przyczynach i skutkach zakłóceń elektromagnetycznych (EMI) w środowiskach przemysłowych. ↩
