

Hysteréza1 je neviditeľný zabijak presnosti, ktorý číha v každom proporcionálnom pohonnom systéme – ticho ničí presnosť polohovania až o 15%, zatiaľ čo inžinieri obviňujú všetko okrem skutočného vinníka. Tento jav spôsobuje, že pohony si “pamätajú” svoje predchádzajúce polohy, čím vytvárajú nepredvídateľné mŕtve zóny, ktoré menia plynulé ovládanie na frustrujúcu nekonzistentnosť. 😠
Hystereza v proporcionálnom riadení pohonu spôsobuje chyby polohovania v rozsahu 2–151 TP3T plného zdvihu v dôsledku mechanického spätného rázu, trenia tesnenia, magnetických účinkov a mŕtvych pásiem regulačného ventilu, čo si vyžaduje kompenzáciu prostredníctvom softvérových algoritmov, mechanického predpätia, spätnej väzby s vyšším rozlíšením a správneho výberu komponentov, aby sa dosiahla presnosť polohovania pod 11 TP3T.
Pred dvoma mesiacmi som spolupracoval s Jennifer, kontrolnou inžinierkou v leteckom výrobnom závode v Seattli, kde presné montážne roboty neustále minuli cieľ o 3 mm – nie náhodne, ale podľa predvídateľného vzorca, ktorý jasne naznačoval hysterézu. Po implementácii našich riešení proti hysteréze Bepto sa jej chyby polohovania znížili na menej ako 0,5 mm. ✈️
Obsah
- Čo presne je hysteréza a prečo sa vyskytuje v proporcionálnych pohonoch?
- Ako hysteréza ovplyvňuje rôzne typy proporcionálnych regulačných systémov?
- Ktoré meracie techniky najlepšie identifikujú a kvantifikujú hysterézne efekty?
- Aké sú najúčinnejšie metódy na minimalizáciu hysterézy vo vašom systéme?
Čo presne je hysteréza a prečo sa vyskytuje v proporcionálnych pohonoch?
Porozumenie mechanizmom hysterézy je nevyhnutné pre dosiahnutie presného proporcionálneho riadenia v pneumatických a hydraulických pohonových systémoch.
Hystereza nastáva, keď poloha výstupu pohonu závisí od aktuálneho vstupného príkazu aj od predchádzajúcej histórie polohy, čo vytvára odlišné reakčné cesty pre príkazy na zvýšenie a zníženie v dôsledku mechanického spätného rázu, trecích síl, magnetických účinkov a mŕtvych pásiem regulačného ventilu, ktoré sa hromadia v celom regulačnom okruhu.
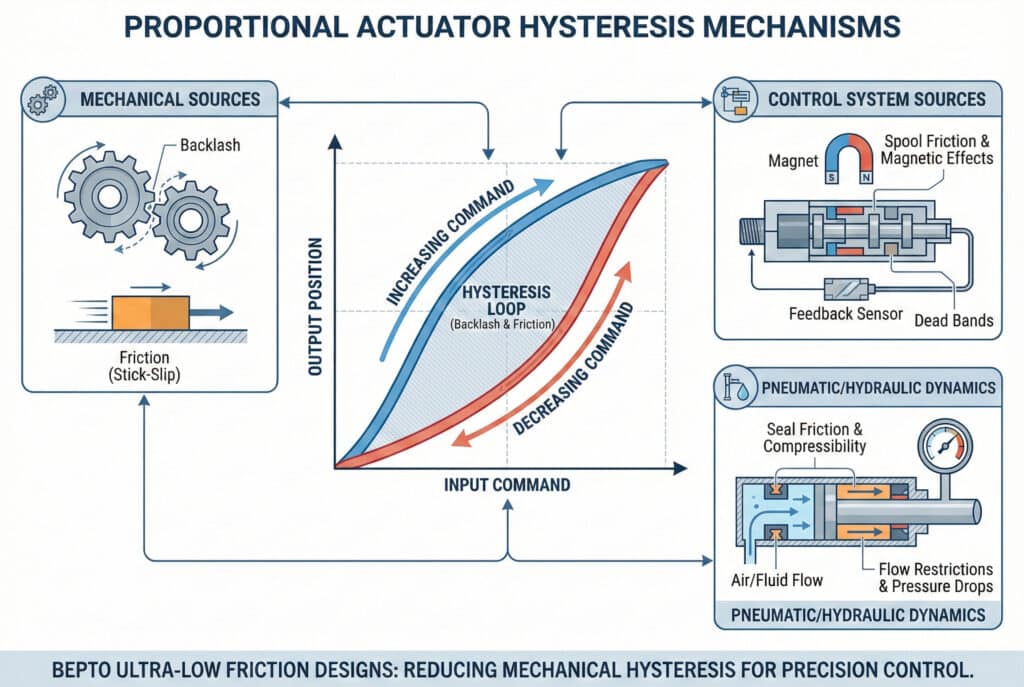
Základné mechanizmy hysterézy
Mechanické zdroje
Fyzikálne komponenty významne prispievajú k hysteréze systému:
- Spätná väzba2: Ozubené prevody, spojky a pripojenia vytvárajú mŕtve zóny
- Trenie: Rozdiely medzi statickým a kinetickým trením spôsobujú správanie typu „stick-slip“ (prídržnosť a kĺzanie).
- Súlad: Pružná deformácia v mechanických spojeniach
- Vzory nosenia: Opotrebenie komponentov spôsobuje nepravidelné kontaktné plochy
Zdroje riadiaceho systému
Elektronické a pneumatické ovládacie prvky pridávajú hysterézu:
| Typ súčasti | Typická hysteréza | Primárna príčina | Stratégia zmierňovania |
|---|---|---|---|
| Servo ventily | 0.1-0.5% | Trenie cievky | Vysokofrekvenčné rozostrenie |
| Proporcionálne ventily3 | 0.5-2% | Magnetická hysteréza | Kompenzácia spätnej väzby |
| Snímače polohy | 0.05-0.2% | Elektronický šum | Filtrovanie signálu |
| Zosilňovače | 0.1-0.3% | Nastavenia mŕtvej zóny | Nastavenie kalibrácie |
Fyzikálne pôvody v pneumatických systémoch
Účinky trenia tesnenia
Pneumatické tesnenia vytvárajú významné zdroje hysterézy:
- Odtrhové trenie: Vyššia sila potrebná na spustenie pohybu
- Trenie pri behu: Nižšia sila pri nepretržitom pohybe
- správanie sa ako tyč a skĺznutie4: Nepravidelný pohyb pri nízkych rýchlostiach
- Závislosť od teploty: Trenie sa mení s prevádzkovou teplotou
Dynamika tlaku
Tlakové účinky pneumatického systému prispievajú k hysteréze:
- Stlačiteľnosť: Stlačenie vzduchu vytvára pružinový efekt
- Obmedzenia prietoku: Obmedzenia týkajúce sa ventilov a armatúr spôsobujú oneskorenia
- Pokles tlaku: Straty na vedení vytvárajú sily závislé od polohy
- Vplyv teploty: Tepelná rozťažnosť ovplyvňuje tuhosť systému
V spoločnosti Bepto sme navrhli naše bezprútové valce s tesneniami s mimoriadne nízkym trením a presne opracovanými vodiacimi systémami, ktoré znižujú mechanickú hysterézu o 60% v porovnaní so štandardnými konštrukciami, čo je kritické pre aplikácie s vysokou presnosťou proporcionálneho riadenia. 🎯
Hystereza závislá od zaťaženia
Vplyvy premenlivého zaťaženia
Vonkajšie zaťaženia výrazne ovplyvňujú hysterézne charakteristiky:
- Gravitačné zaťaženie: Zmeny sily v závislosti od polohy
- Inerčné zaťaženia: Požiadavky na silu závislé od zrýchlenia
- Procesné zaťaženia: Premenné vonkajšie sily počas prevádzky
- Triecie zaťaženia: Zmeny povrchovej kontaktnej sily
Interakcie dynamického zaťaženia
Pohybujúce sa zaťaženia vytvárajú zložité hysterézne vzory:
- Účinky zrýchlenia: Inerčné sily pri zmenách rýchlosti
- Vibračná spojka: Vonkajšie vibrácie ovplyvňujú polohovanie
- Rezonančné interakcie: Vzbudzovanie vlastnej frekvencie
- Variácie tlmenia: Charakteristiky tlmenia závislé od zaťaženia
Ako hysteréza ovplyvňuje rôzne typy proporcionálnych regulačných systémov?
Hysterezné efekty sa výrazne líšia v závislosti od rôznych technológií pohonov a architektúr riadenia, čo si vyžaduje prispôsobené kompenzačné stratégie.
Proporcionálne systémy s otvorenou slučkou vykazujú chyby hysterézy 5-15% bez možnosti korekcie, zatiaľ čo systémy s uzavretou slučkou môžu znížiť hysterézu na 0,5-2% prostredníctvom kompenzácie spätnej väzby, pričom pokročilé servosystémy dosahujú presnosť pod 0,1% pomocou vysokorozlíšených enkodérov a sofistikovaných riadiacich algoritmov.
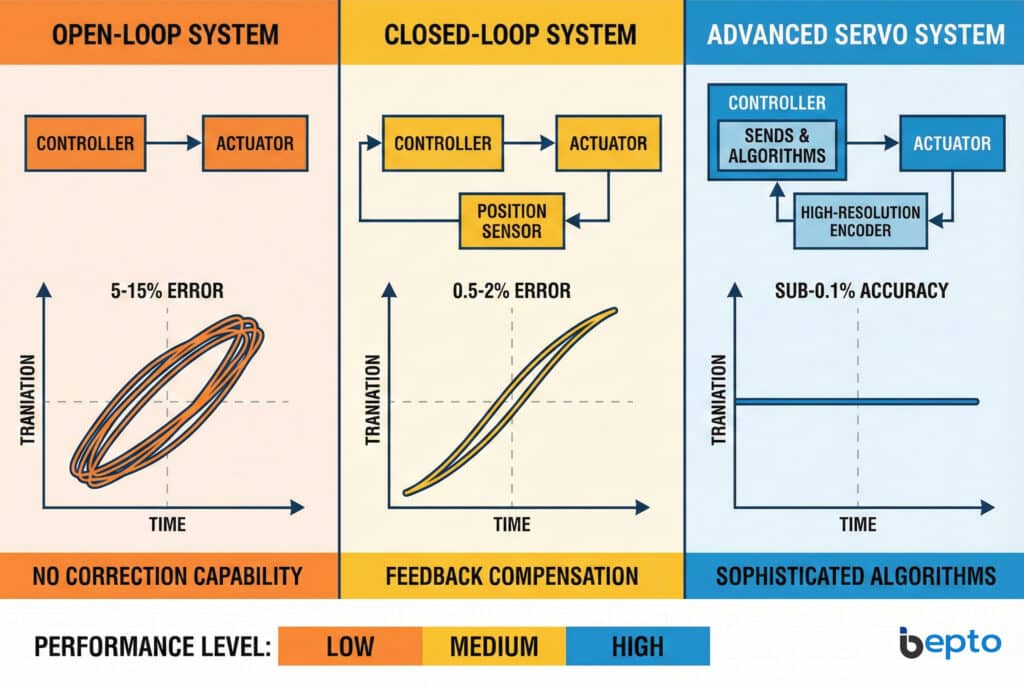
Systémy riadenia s otvorenou slučkou
Vnútorné obmedzenia
Systémy s otvorenou slučkou nedokážu kompenzovať hysterézne efekty:
- Žiadna korekcia spätnej väzby: Chyby sa hromadia bez toho, aby boli zistené
- Predvídateľné vzorce: Hystereza spôsobuje opakované chyby polohovania
- Citlivosť na teplotu: Výkon sa líši v závislosti od prevádzkových podmienok.
- Závislosť zaťaženia: Rôzne zaťaženia vytvárajú rôzne hysterézne vzory
Typické výkonové charakteristiky
Výkon hysterézy systému s otvorenou slučkou sa líši v závislosti od aplikácie:
| Typ aplikácie | Rozsah hysterézy | Prijateľné použitie | Obmedzenia výkonu |
|---|---|---|---|
| Jednoduché umiestnenie | 5-15% | Nekritické úlohy | Slabá opakovateľnosť |
| Regulácia rýchlosti | 3-8% | Hrubá regulácia rýchlosti | Variabilný výkon |
| Kontrola sily | 10-25% | Základné použitie sily | Nekonzistentný výstup |
| Viacosové systémy | 8-20% | Jednoduchá automatizácia | Kumulatívne chyby |
Systémy riadenia s uzavretou slučkou
Výhody kompenzácie spätnej väzby
Systémy s uzavretou slučkou môžu aktívne kompenzovať hysterézu:
- Detekcia chýb: Neustále monitorovanie polohy
- Korekcia v reálnom čase: Okamžitá reakcia na chyby polohovania
- Adaptívne riadenie: Učiace sa algoritmy zlepšujú výkonnosť
- Odmietnutie rušenia: Kompenzácia vonkajšej sily
Účinnosť riadiaceho algoritmu
Rôzne stratégie riadenia riešia hysterézu s rôznou mierou úspešnosti:
- PID regulácia5: Základná kompenzácia, 2-5% zvyšková hysteréza
- Dopredu orientované riadenie: Prediktívna kompenzácia, 1-3% reziduálna
- Adaptívne riadenie: Kompenzácia učenia, 0,5-2% reziduálna
- Modelové riadenie: Teoretická kompenzácia, 0,1-1% reziduálna
Servo riadiace systémy
Pokročilé techniky odmeňovania
Vysoko výkonné servosystémy využívajú sofistikovanú kompenzáciu hysterézy:
- Mapovanie hysterézy: Charakteristika systému a kompenzačné tabuľky
- Techniky predpätia: Mechanické predpätie na elimináciu mŕtvych zón
- Dither signály: Vysokofrekvenčné budenie na prekonanie trenia
- Prediktívne algoritmy: Predikcia hysterézy na základe modelu
Michael, robotický inžinier v závode na presnú výrobu v Severnej Karolíne, implementoval naše odporúčané vylepšenia servo riadenia na svojej montážnej linke. Presnosť polohovania sa zlepšila z ±2,5 mm na ±0,3 mm, čím sa znížil počet chýb výrobkov o 75% a ušetrilo sa $50 000 mesačne na nákladoch na opravy. 🤖
Výzvy viacosového systému
Kumulatívne účinky
Problémy s hysterezou viacerých pohonov:
- Akumulácia chýb: Chyby jednotlivých osí sa kombinujú
- Spojovacie účinky: Interakcie osí vytvárajú zložité vzory
- Problémy so synchronizáciou: Rôzne vzory hysterézy spôsobujú problémy s koordináciou
- Zložitosť kalibrácie: Viacnásobné systémy vyžadujú individuálne nastavenie
Koordinácia stratégií
Pokročilé viacosové systémy využívajú špecializované techniky:
- Ovládanie master-slave: Jedna os vedie, ostatné nasledujú
- Kompenzácia krížového skreslenia: Korekcia interakcie osí
- Synchronizované polohovanie: Koordinované pohybové profily
- Globálna optimalizácia: Optimalizácia výkonu celého systému
Ktoré meracie techniky najlepšie identifikujú a kvantifikujú hysterézne efekty?
Presné meranie a charakterizácia hysterézy umožňuje vývoj efektívnej kompenzačnej stratégie a optimalizáciu systému.
Meranie hysterézy vyžaduje obojsmerné polohovacie testy s vysokorozlíšiteľnými enkodérmi, zaznamenávanie vzťahov medzi polohou a príkazom počas kompletných cyklov, analýzu šírky slučky a asymetrických vzorov a dokumentovanie závislostí od teploty a zaťaženia s cieľom vytvoriť komplexné kompenzačné mapy pre optimálny výkon riadenia.
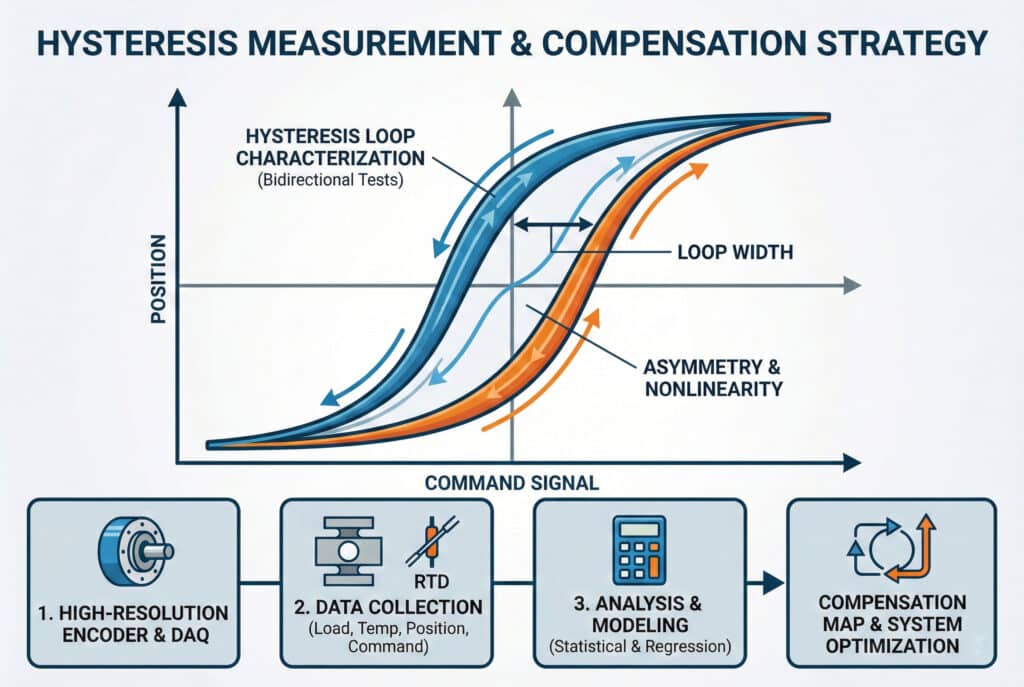
Štandardné protokoly merania
Obousmerné testy polohovania
Komplexná charakteristika hysterézy vyžaduje systematické testovanie:
- Plné zdvihové cykly: Kompletné sekvencie vysúvania a zasúvania
- Viac rýchlostí: Rôzne profily rýchlosti na identifikáciu závislosti od rýchlosti
- Zmeny zaťaženia: Rôzne vonkajšie zaťaženia na zmapovanie účinkov zaťaženia
- Teplotné rozsahy: Posúdenie vplyvu prevádzkovej teploty
Požiadavky na zber údajov
Presné meranie hysterézy vyžaduje vysokokvalitné meracie prístroje:
| Parametre merania | Požadované rozlíšenie | Typické vybavenie | Presnosť cieľa |
|---|---|---|---|
| Spätná väzba na polohu | 0,01% zdvihu | Lineárny snímač | ±0,0051 TP3T |
| Príkazový signál | Minimálne 12 bitov | DAQ systém | ±0,1% |
| Meranie zaťaženia | 1% menovitej sily | Zaťažovacia bunka | ±0,5% |
| Teplota | ±1°C | RTD senzor | ±0.5°C |
Techniky analýzy
Charakteristika hysteréznej slučky
Matematická analýza odhaľuje charakteristiky hysterézy:
- Šírka slučky: Maximálny rozdiel polôh pri rovnakom príkaze
- Asymetria: Smerová odchýlka v polohovacích chybách
- Nelinearita: Odchýlka od ideálnej lineárnej odozvy
- Opakovateľnosť: Konzistentnosť v rámci viacerých cyklov
Metódy štatistickej analýzy
Pokročilé analytické techniky kvantifikujú hysterézne efekty:
- Štandardná odchýlka: Meranie opakovatelnosti polohovania
- Korelačná analýza: Sila vzťahu medzi vstupmi a výstupmi
- Frekvenčná analýza: Dynamické charakteristiky odozvy
- Regresná analýza: Vývoj matematického modelu
Monitorovacie systémy v reálnom čase
Neustále sledovanie hysterézy
Výrobné systémy využívajú výhody nepretržitého monitorovania hysterézy:
- Vstavané senzory: Vstavané systémy spätnej väzby polohy
- Zaznamenávanie údajov: Neustále zaznamenávanie výkonu
- Analýza trendov: Sledovanie dlhodobého zhoršenia výkonu
- Prediktívna údržba: Včasné varovanie pred opotrebením komponentov
Naše diagnostické systémy Bepto zahŕňajú monitorovanie hysterézy v reálnom čase, ktoré upozorňuje obsluhu, keď chyby polohovania prekročia prahové hodnoty 0,5%, čo umožňuje proaktívnu údržbu skôr, ako sa presnosť zhorší na neprijateľnú úroveň. 📊
Posudzovanie vplyvov na životné prostredie
Vplyv teploty
Teplota výrazne ovplyvňuje charakteristiky hysterézy:
- Tepelná rozťažnosť: Zmeny mechanických rozmerov
- Zmeny viskozity: Zmeny vlastností kvapalín
- Vlastnosti materiálu: Závislosť modulu pružnosti od teploty
- Výkonnosť tesnenia: Zmeny koeficientu trenia
Analýza závislosti od zaťaženia
Vonkajšie zaťaženia vytvárajú zložité hysterézne vzory:
- Statické zaťaženie: Vplyv konštantnej sily na polohovanie
- Dynamické zaťaženie: Pôsobenie premennej sily počas pohybu
- Zotrvačné účinky: Chyby polohovania závislé od zrýchlenia
- Variácie trenia: Vplyv stavu povrchu na výkonnosť
Aké sú najúčinnejšie metódy na minimalizáciu hysterézy vo vašom systéme?
Implementáciou komplexných stratégií na zníženie hysterézy je možné dosiahnuť presnosť polohovania pod 1% v náročných aplikáciách proporcionálneho riadenia.
Účinná minimalizácia hysterézy kombinuje mechanické vylepšenia, vrátane komponentov s nízkym trením a elimináciou spätného rázu, vylepšenia riadiaceho systému s kompenzáciou predbežného riadenia a adaptívnymi algoritmami, ako aj riadenie teploty a stability zaťaženia, čím sa hysteréza zvyčajne znižuje z 5-15% na menej ako 1% plného rozsahu.
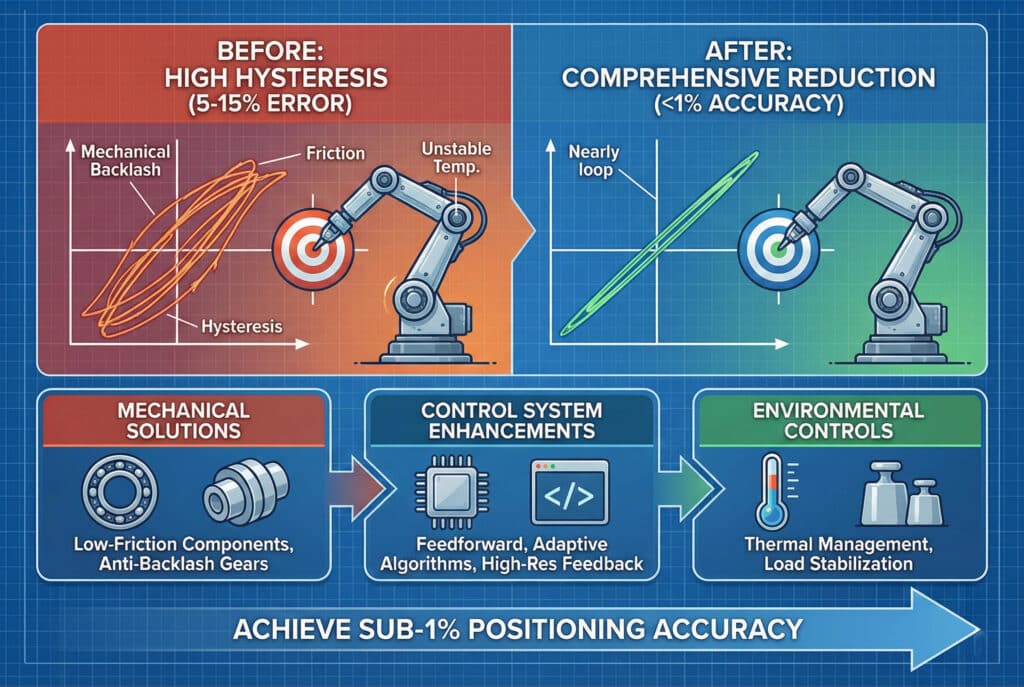
Mechanické riešenia
Výber a návrh komponentov
Vyberte komponenty špeciálne navrhnuté pre nízku hysterézu:
- Presné ložiská: Vysoko kvalitné lineárne vedenia s minimálnou vôľou
- Tesnenia s nízkym trením: Pokročilé materiály a konštrukcie tesnení
- Pevné spojky: Eliminujte zdroje mechanického spätného rázu
- Predinštalované systémy: Mechanické predpätie na elimináciu mŕtvych zón
Vylepšenia architektúry systému
Navrhujte mechanické systémy tak, aby sa minimalizovali zdroje hysterézy:
| Funkcia dizajnu | Zníženie hysterézy | Náklady na implementáciu | Vplyv na údržbu |
|---|---|---|---|
| Priamy pohon | 80-90% | Vysoká | Nízka |
| Predinštalované sprievodcovia | 60-70% | Stredné | Stredné |
| Presné spojky | 40-50% | Nízka | Nízka |
| Prevody proti spätnému rázu | 70-80% | Stredné | Vysoká |
Vylepšenia riadiaceho systému
Techniky kompenzácie softvéru
Pokročilé riadiace algoritmy môžu výrazne znížiť hysterézne efekty:
- Mapovanie hysterézy: Vyhľadávacie tabuľky pre korekciu polohy
- Dopredu orientované riadenie: Prediktívna kompenzácia na základe smeru príkazu
- Adaptívne algoritmy: Samoučiaca kompenzácia hysterézy
- Modelové riadenie: Predikcia hysterézy na základe fyziky
Vylepšenia systému spätnej väzby
Vylepšené systémy spätnej väzby umožňujú lepšiu kompenzáciu hysterézy:
- Enkodéry s vyšším rozlíšením: Zlepšená presnosť merania polohy
- Viacnásobné snímače spätnej väzby: Redundantné meranie polohy
- Spätná väzba rýchlosti: Algoritmy kompenzácie založené na sadzbách
- Sila spätnej väzby: Kompenzácia hysterézy závislej od zaťaženia
Stratégie kontroly životného prostredia
Riadenie teploty
Stabilné prevádzkové teploty znižujú kolísanie hysterézy:
- Tepelná izolácia: Chráňte pohony pred teplotnými výkyvmi
- Aktívne chladenie: Udržujte konzistentné prevádzkové teploty
- Kompenzácia teploty: Softvérová korekcia teplotných vplyvov
- Tepelná predúprava: Nechajte systémy dosiahnuť tepelnú rovnováhu
Stabilizácia nákladu
Konzistentné podmienky zaťaženia minimalizujú kolísania hysterézy:
- Izolácia zaťaženia: Oddelenie vonkajších rušivých vplyvov
- Vyvažovanie: Znížte vplyv gravitačného zaťaženia
- Tlmenie vibrácií: Minimalizujte dynamické kolísanie zaťaženia
- Optimalizácia procesov: Znížte premenné vonkajšie sily
Sarah, procesná inžinierka vo farmaceutickom baliacom závode v Colorade, implementovala náš komplexný program na zníženie hysterézy. Presnosť jej počítania tabliet sa zlepšila z 98,51 TP3T na 99,81 TP3T, čím splnila požiadavky FDA a zároveň znížila množstvo odpadu o 1 TP4T 25 000 mesačne. 💊
Pokročilé techniky odmeňovania
Aplikácia signálu Dither
Vysokofrekvenčné budenie môže prekonať hysterézu spôsobenú trením:
- Výber frekvencie: Vyberte frekvencie nad šírkou pásma systému
- Optimalizácia amplitúdy: Vyvážte efektívnosť so stabilitou systému
- Návrh vlny: Sinusoidálne, trojuholníkové alebo náhodné signály
- Metódy implementácie: Generovanie hardvéru alebo softvéru
Metódy prediktívneho riadenia
Modelové prístupy poskytujú vynikajúcu kompenzáciu hysterézy:
- Identifikácia systému: Vývoj matematického modelu
- Kalmanovo filtrovanie: Odhad optimálneho stavu
- Modelové prediktívne riadenie: Optimalizácia budúceho stavu
- Adaptívne modelovanie: Aktualizácie parametrov modelu v reálnom čase
Údržba a kalibrácia
Pravidelné kalibračné postupy
Systematická kalibrácia udržuje nízku hysterézu:
- Periodické mapovanie hysterézy: Zdokumentujte zmeny výkonu
- Kontrola komponentov: Identifikácia degradácie spôsobené opotrebením
- Údržba mazania: Udržujte optimálnu úroveň trenia
- Overenie vyrovnania: Zabezpečte mechanickú presnosť
Stratégie prediktívnej údržby
Proaktívna údržba zabraňuje degradácii hysterézy:
- Výkonnostný trend: Sledujte zmeny hysterézy v čase
- Sledovanie životnosti komponentov: Výmena komponentov pred poruchou
- Monitorovanie stavu: Neustále hodnotenie stavu systému
- Preventívna výmena: Plánujte údržbu na základe používania
V spoločnosti Bepto naše balíky na zníženie hysterézy zvyčajne dosahujú zlepšenie presnosti polohovania o 70–851 TP3T, pričom mnohí zákazníci hlásia úrovne hysterézy pod 0,51 TP3T vo svojich najnáročnejších aplikáciách – výkon, ktorý sa priamo prejavuje vyššou kvalitou výrobkov a znížením odpadu. 🎯
Záver
Porozumenie a kontrola hysterézy je nevyhnutná pre dosiahnutie presného proporcionálneho ovládania pohonu, čo vyžaduje systematické meranie, cielenú kompenzáciu a priebežnú údržbu pre optimálny výkon.
Často kladené otázky o hysteréze v proporcionálnom riadení pohonu
Otázka: Čo sa považuje za prijateľnú hysterézu v proporcionálnych pohonových systémoch?
Prijateľná hysteréza závisí od požiadaviek aplikácie: všeobecná automatizácia toleruje 2-5%, presné montážne práce vyžadujú menej ako 1% a ultrapresné aplikácie vyžadujú úrovne hysterézy pod 0,5%. Naše systémy Bepto zvyčajne dosahujú hysterézu 0,3-0,8% pri správnej implementácii.
Otázka: Môže softvérová kompenzácia úplne eliminovať mechanickú hysterézu?
Softvérová kompenzácia môže znížiť hysterézu o 60–80%, ale nemôže úplne eliminovať mechanické zdroje, ako je spätný ráz a trenie. Kombináciou mechanických vylepšení a softvérovej kompenzácie sa dosahujú najlepšie výsledky, zvyčajne s celkovou hysterézou systému pod 1%.
Otázka: Ako často by som mal prekalibrovať svoj proporcionálny regulačný systém pre hysterézu?
Frekvencia kalibrácie závisí od intenzity používania a požiadaviek na presnosť: vysoko presné systémy vyžadujú mesačnú kalibráciu, všeobecné aplikácie vyžadujú štvrťročné kontroly a systémy s nízkou presnosťou môžu používať ročné kalibračné plány s nepretržitým monitorovaním výkonu.
Otázka: Aký je rozdiel medzi hysterézou a spätnou väzbou v systémoch pohonov?
Vôľa je mechanická vôľa v spojoch a prevodoch, zatiaľ čo hysteréza zahŕňa všetky účinky závislé od polohy, vrátane trenia, magnetických účinkov a mŕtvych pásiem riadiaceho systému. Vôľa je jednou zo zložiek celkovej hysterézy systému.
Otázka: Ako zistím, či moje problémy s polohovaním spôsobuje hysteréza?
Hystereza vytvára charakteristické vzory: konzistentné chyby polohovania, ktoré závisia od smeru priblíženia, odlišná presnosť pri pohybe nahor a nadol a opakované vzory chýb. Testy obojsmerného polohovania odhaľujú hysterézne slučky, ktoré potvrdzujú diagnózu.
-
Zoznámte sa s fyzikálnymi princípmi hysterézy a jej vplyvom na presnosť v rôznych technických disciplínach. ↩
-
Porozumejte príčinám a technickým riešeniam na odstránenie spätného rázu v mechanických spojeniach. ↩
-
Objavte vnútornú mechaniku a prevádzkové princípy proporcionálnych pneumatických regulačných ventilov. ↩
-
Objavte mechanizmus fenoménu stick-slip a jeho vplyv na pohyb pohonu pri nízkej rýchlosti. ↩
-
Získajte hlbšie pochopenie teórie PID regulácie a jej uplatnenia v priemyselnej automatizácii. ↩
