
เครื่องจักรของคุณกำลังผลิตชิ้นงานที่มีความคลาดเคลื่อนด้านขนาดตลอดกะการผลิต เนื่องจากแรงกดอากาศสำหรับการจับยึดที่ฟิกซ์เจอร์ลดลง 0.4 บาร์ เมื่อเครื่องจักรปั๊มที่อยู่ติดกันทำงานและดึงแรงดันจากท่อร่วมจ่ายที่ใช้ร่วมกัน หุ่นยนต์พ่นสีของคุณกำลังสร้างความแตกต่างของระดับความเงา เนื่องจากแรงดันอากาศสำหรับพ่นละอองที่ปืนพ่นสีมีการเปลี่ยนแปลงทุกครั้งที่วาล์วบนสายจ่ายเดียวกันทำงานเครื่องมือวัดแรงบิดในการประกอบของคุณกำลังให้แรงบิดของตัวยึดที่ไม่สม่ำเสมอเนื่องจากความดันที่จ่ายเข้าเครื่องมือมีความผันผวน 0.8 บาร์ ระหว่างช่วงความต้องการสูงสุดและช่วงที่ระบบหยุดนิ่งในระบบ FRL แบบรวมศูนย์ของคุณคุณได้ระบุการบำบัดและการควบคุมอากาศอัดตามวิธีการในตำรา — โดยใช้หน่วย FRL แบบรวมศูนย์หนึ่งหน่วยที่ทางเข้าเครื่องจักร ขนาดที่รองรับการไหลทั้งหมด ตั้งค่าความดันสูงสุดที่อุปกรณ์ใดๆ ในเครื่องจักรต้องการ — และทุกอุปกรณ์ที่ต้องการความดันที่แตกต่างจากการตั้งค่านั้น หรือที่ต้องการความเสถียรของความดันที่แยกจากอุปกรณ์อื่นๆ ในแหล่งจ่ายเดียวกัน กำลังทำงานนอกเงื่อนไขที่กำหนดในทุกๆ รอบการทำงาน 🔧
ระบบ FRL แบบรวมศูนย์เป็นข้อกำหนดที่ถูกต้องสำหรับเครื่องจักรและระบบที่อุปกรณ์ปลายทางทั้งหมดทำงานที่ความดันเดียวกัน ที่ซึ่งปริมาณการไหลทั้งหมดสามารถจ่ายได้โดยตัวกรอง-ตัวปรับความดัน-ตัวหล่อลื่นเพียงตัวเดียวที่มีขนาดเหมาะสมกับความต้องการรวม และที่ซึ่งความง่ายในการติดตั้งและการบำรุงรักษาของจุดบำบัดเพียงจุดเดียวมีความสำคัญมากกว่าความอิสระด้านความดันที่การปรับความดันที่จุดใช้งานมอบให้ตัวปรับแรงดันที่จุดใช้งานเป็นข้อกำหนดที่ถูกต้องสำหรับเครื่องจักรหรือระบบใด ๆ ที่อุปกรณ์แต่ละชิ้นต้องการแรงดันการทำงานที่แตกต่างกัน ที่ต้องรักษาเสถียรภาพของแรงดันที่อุปกรณ์เฉพาะโดยไม่ขึ้นอยู่กับความผันผวนของความต้องการในส่วนอื่น ๆ ของแหล่งจ่ายเดียวกัน ที่อุปกรณ์ต้องการแรงดันต่ำกว่าแรงดันจ่ายของเครื่องจักร หรือที่แรงดันที่อุปกรณ์สำคัญต้องถูกควบคุมให้อยู่ในค่าความคลาดเคลื่อนที่เข้มงวดกว่าที่ตัวปรับแรงดันแบบรวมศูนย์สามารถรักษาได้ภายใต้เงื่อนไขความต้องการของระบบทั้งหมด.
ยกตัวอย่างเช่น เหม่ยหลิง วิศวกรกระบวนการที่โรงงานประกอบอุปกรณ์อิเล็กทรอนิกส์ความแม่นยำสูงในเซินเจิ้น ประเทศจีน เครื่องจักร SMT pick-and-place ของเธอมีชุดควบคุมแรงดันอากาศแบบรวมศูนย์ (FRL) ที่ตั้งค่าไว้ที่ 5 บาร์ ซึ่งเป็นแรงดันที่จำเป็นสำหรับกระบอกสูบขับเคลื่อนหลักของแกนหลักเครื่องกำเนิดสุญญากาศของเธอ ซึ่งต้องการแรงดัน 3.5 บาร์เพื่อให้ได้ระดับสุญญากาศที่เหมาะสมและการใช้ลมที่เหมาะสม กำลังทำงานที่แรงดัน 5 บาร์ — ใช้ลมอัดมากกว่าที่จำเป็นถึง 40% และสร้างระดับสุญญากาศสูงกว่าข้อกำหนดในการจัดการชิ้นส่วนถึง 15% ซึ่งทำให้ชิ้นส่วนเกิดความเสียหายบน BGA ที่มีระยะห่างละเอียดไขควงลมของเธอต้องการแรงดัน 4 บาร์สำหรับการปรับเทียบแรงบิด — ที่แรงดัน 5 บาร์ พวกมันทำให้ตัวยึดแน่นเกินไปถึง 18%การเพิ่มตัวปรับแรงดันอากาศที่จุดใช้งาน (set to 3.5 bar) ที่เครื่องกำเนิดสุญญากาศ และที่สถานีไขควงแต่ละจุด (set to 4 bar) — โดยยังคงใช้ระบบ FRL แบบรวมศูนย์สำหรับระบบขับเคลื่อนกังหัน — ช่วยลดการใช้ลมอัดลงได้ 22%, ลดความเสียหายจากการจัดการชิ้นส่วน, และทำให้แรงบิดของตัวยึดอยู่ในเกณฑ์มาตรฐานทุกจุด 🔧
สารบัญ
- ความแตกต่างหลักในการทำงานระหว่าง FRL แบบรวมศูนย์กับการควบคุมที่จุดใช้งานคืออะไร?
- เมื่อใดที่ระบบ FRL แบบรวมศูนย์เป็นข้อกำหนดที่ถูกต้อง?
- แอปพลิเคชันใดบ้างที่ต้องการตัวควบคุมแรงดันที่จุดใช้งานเพื่อให้ได้ประสิทธิภาพที่เชื่อถือได้?
- เครื่องควบคุมแรงดันแบบรวมศูนย์และแบบจุดใช้งานเปรียบเทียบกันอย่างไรในด้านความเสถียรของแรงดัน คุณภาพอากาศ และต้นทุนรวม?
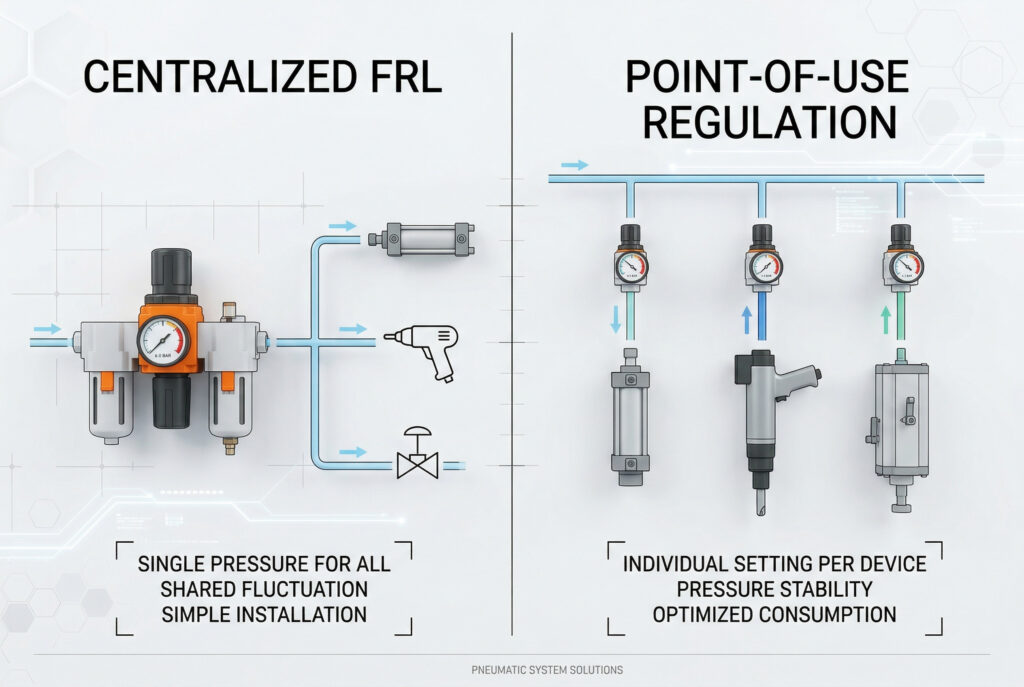
ความแตกต่างหลักในการทำงานระหว่าง FRL แบบรวมศูนย์กับการควบคุมที่จุดใช้งานคืออะไร?
ความแตกต่างเชิงหน้าที่ระหว่างแนวทางทั้งสองนี้ไม่ได้ขึ้นอยู่กับคุณภาพของส่วนประกอบ — แต่เป็นเรื่องของตำแหน่งที่ตั้งและรักษาระดับความดันเมื่อเทียบกับอุปกรณ์ที่ต้องการ และจำนวนอุปกรณ์ที่ใช้การตั้งค่าความดันเดียวกัน 🤔
ระบบ FRL แบบรวมศูนย์จะกำหนดแรงดันจ่ายเพียงค่าเดียวสำหรับอุปกรณ์ปลายทางทั้งหมด โดยใช้ตัวควบคุมแรงดันเพียงตัวเดียวซึ่งติดตั้งอยู่ที่ทางเข้าของเครื่องจักรหรือระบบ — อุปกรณ์ทุกชิ้นที่อยู่ถัดจากตัวควบคุมแรงดันดังกล่าวจะได้รับแรงดันที่ควบคุมไว้ในระดับเดียวกัน โดยจะเปลี่ยนแปลงเฉพาะส่วนที่ลดลงจากการไหลผ่านท่อจ่ายระหว่างตัวควบคุมกับอุปกรณ์เท่านั้นตัวปรับแรงดันที่จุดใช้งาน (Point-of-Use Regulator) จะติดตั้งอยู่ทันทีด้านต้นน้ำของอุปกรณ์เฉพาะเจาะจง และตั้งค่าความดันสำหรับอุปกรณ์นั้นอย่างอิสระจากความดันจ่ายและจากความผันผวนของความดันที่เกิดจากอุปกรณ์อื่น ๆ บนแหล่งจ่ายเดียวกัน — ตัวปรับแรงดันที่จุดใช้งานแต่ละตัวจะรักษาค่าความดันที่ตั้งไว้ที่ทางออกของมันไว้ได้ตลอดเวลา ไม่ว่าความดันจ่ายจะเป็นอย่างไร ตราบใดที่ความดันจ่ายยังคงอยู่เหนือจุดตั้งค่าของตัวปรับแรงดันบวกกับความแตกต่างของความดันขั้นต่ำที่จำเป็นของตัวปรับแรงดัน.
การเปรียบเทียบสถาปัตยกรรมแกนหลัก
| ทรัพย์สิน | ระบบควบคุมแรงดันอากาศแบบรวมศูนย์ | ตัวปรับแรงดัน ณ จุดใช้งาน |
|---|---|---|
| ตำแหน่งการกำกับดูแล | ทางเข้าของเครื่องจักร/ระบบ | ทันทีที่อยู่เหนือต้นน้ำของอุปกรณ์ |
| การตั้งค่าความดัน | ตั้งค่าเดียวสำหรับอุปกรณ์ปลายทางทั้งหมด | การตั้งค่าเฉพาะรายอุปกรณ์ |
| อุปกรณ์ที่ความดันต่างกัน | ❌ ไม่สามารถทำได้จากหน่วยเดียว | ✅ อุปกรณ์แต่ละชิ้นตั้งค่าแยกกัน |
| ความเสถียรของแรงดันที่อุปกรณ์ | ได้รับผลกระทบจากการลดลงของการกระจาย + ความต้องการ | ✅ รักษาไว้ที่ทางเข้าของอุปกรณ์ |
| ผลกระทบจากความผันผวนของแรงดันในการจ่าย | แพร่กระจายไปยังอุปกรณ์ทั้งหมด | ✅ ถูกปฏิเสธ — หน่วยงานกำกับดูแลรับไว้ |
| การแยกความผันผวนของความต้องการ | ❌ อุปกรณ์ทั้งหมดจะแชร์การลดลงของพลังงาน | ✅ อุปกรณ์แต่ละชิ้นแยกออกจากกัน |
| ตำแหน่งของไส้กรอง | รวมศูนย์ — หนึ่งองค์ประกอบ | เพิ่มเติม — ต่ออุปกรณ์หากจำเป็น |
| ตำแหน่งของเครื่องหล่อลื่น | รวมศูนย์ — หนึ่งเครื่องหล่อลื่น | เพิ่มเติม — ต่ออุปกรณ์หากจำเป็น |
| ความซับซ้อนในการติดตั้ง | ✅ ง่าย — หนึ่งหน่วย | หลายหน่วย — หนึ่งหน่วยต่ออุปกรณ์ |
| จุดบำรุงรักษา | ✅ หน่วยเดียว — หนึ่ง FRL | หลายรายการ — หนึ่งรายการต่อหน่วยงานกำกับดูแล |
| การเพิ่มประสิทธิภาพการใช้ลมอัด | ❌ อุปกรณ์ทั้งหมดที่ความดันสูงสุดตามที่กำหนด | ✅ อุปกรณ์แต่ละชิ้นมีแรงดันขั้นต่ำตามที่กำหนด |
| การลดความดันในระบบการจ่าย | ส่งผลกระทบต่อทุกอุปกรณ์ | ✅ ชดเชย ณ จุดใช้งาน |
| ความทนทานต่อแรงดันของอุปกรณ์ที่สำคัญ | จำกัดด้วยความแปรปรวนของการกระจาย | ✅ เข้มงวด — ตัวควบคุมที่อุปกรณ์ |
| จุดปฏิบัติตามมาตรฐาน ISO 8573 | ที่ร้านเอาท์เล็ต FRL | ที่ทางออกของ FRL (ตัวกรอง) + ทางเข้าของอุปกรณ์ (ความดัน) |
| ต้นทุนต่อหน่วย | ✅ ต่ำกว่า — หนึ่ง FRL | สูงขึ้น — หน่วยงานกำกับดูแลหลายแห่ง |
| ต้นทุนระบบทั้งหมด | ✅ ต่ำกว่า (ระบบง่าย) | สูงขึ้น (ระบบซับซ้อน) — ชดเชยด้วยประสิทธิภาพ |
ปัญหาการลดความดัน — เหตุใดการควบคุมแบบรวมศูนย์จึงล้มเหลวที่อุปกรณ์
ความดันที่อุปกรณ์ใดๆ ที่อยู่ถัดจาก FRL แบบรวมศูนย์คือ:
โดยที่:
- = ความดันตกคร่อมคงที่ในท่อที่อัตราการไหลของอุปกรณ์
- = การลดลงของความดันแบบไดนามิกจากความต้องการพร้อมกันบนแหล่งจ่ายที่ใช้ร่วมกัน
การลดลงของความดันในการกระจาย (Hagen-Poiseuille สำหรับการไหลแบบชั้นเดียว, ดาร์ซี-ไวส์บาค1 สำหรับสภาวะปั่นป่วน:
สำหรับท่อขนาดเส้นผ่านศูนย์กลางภายใน 6 มม. ความยาว 3 เมตร อัตราการไหล 100 นล./นาที:
การลดลงของความต้องการแบบไดนามิก — เมื่อกระบอกสูบที่อยู่ติดกันจุดระเบิดพร้อมกัน:
สำหรับกระบอกสูบ DN25 ที่ใช้การวาด 500 Nl/นาที บนท่อร่วมที่ใช้ร่วมกัน:
การเปลี่ยนแปลงความดันรวมที่อุปกรณ์: 0.15 + 0.5 = 0.65 บาร์ — การเปลี่ยนแปลงที่ทำให้เครื่องมือวัดแรงบิดของเมย์-หลิงไม่สอดคล้องในเซินเจิ้น และที่ตัวควบคุมจุดใช้งานที่ทางเข้าของเครื่องมือสามารถกำจัดได้โดยการควบคุมให้ถึงจุดตั้งค่าโดยไม่คำนึงถึงความผันผวนของกระแสขึ้นต้น.
⚠️ หลักการออกแบบที่สำคัญ: ตัวควบคุมแรงดันสามารถลดแรงดันได้เท่านั้น — ไม่สามารถเพิ่มแรงดันได้ ตัวควบคุมแรงดันที่จุดใช้งานต้องการแรงดันจ่ายที่ทางเข้าให้สูงกว่าจุดตั้งค่าของอุปกรณ์บวกกับแรงดันต่างขั้นต่ำของตัวควบคุม (โดยทั่วไปคือ 0.5–1.0 บาร์) อย่างสม่ำเสมอ หากแหล่งจ่าย FRL แบบรวมศูนย์ลดลงต่ำกว่าเกณฑ์นี้ในช่วงที่มีความต้องการสูงสุด ตัวควบคุมแรงดันที่จุดใช้งานจะสูญเสียความสามารถในการควบคุมและแรงดันของอุปกรณ์จะลดลงFRL แบบรวมศูนย์ต้องตั้งค่าให้สูงเพียงพอเพื่อรักษาปริมาณการจ่ายให้สูงกว่าจุดตั้งค่าของตัวควบคุมทุกจุดที่จุดใช้งาน บวกกับความต้องการส่วนต่างภายใต้สภาวะความต้องการพร้อมกันที่เลวร้ายที่สุด.
ที่ Bepto เราจัดหาหน่วย FRL แบบรวมศูนย์, ตัวควบคุมขนาดเล็กที่จุดใช้งาน, ชุดซ่อมตัวควบคุม, องค์ประกอบตัวกรองทดแทน, และชุดประกอบไส้และถ้วยหล่อลื่นสำหรับผลิตภัณฑ์ FRL และตัวควบคุมของแบรนด์นิวแมติกส์ชั้นนำทั้งหมด — พร้อมยืนยันความสามารถในการไหล, ช่วงความดัน, และขนาดพอร์ตในทุกผลิตภัณฑ์ 💰
เมื่อใดที่ระบบ FRL แบบรวมศูนย์เป็นข้อกำหนดที่ถูกต้อง?
ระบบ FRL แบบรวมศูนย์เป็นข้อกำหนดที่ถูกต้องและพบมากที่สุดสำหรับการใช้งานระบบจ่ายลมในเครื่องจักรอุตสาหกรรมส่วนใหญ่ — เนื่องจากสภาวะที่ทำให้การควบคุมแบบรวมศูนย์ไม่เพียงพอเป็นสภาวะเฉพาะและสามารถระบุได้ และเมื่อไม่มีสภาวะเหล่านั้น ระบบ FRL แบบรวมศูนย์จะมอบสถาปัตยกรรมที่ง่ายกว่าและต้องการการบำรุงรักษาน้อยกว่าพร้อมกับการควบคุมแรงดันที่เพียงพออย่างสมบูรณ์ ✅
ระบบ FRL แบบรวมศูนย์เป็นข้อกำหนดที่ถูกต้องสำหรับเครื่องจักรและระบบที่อุปกรณ์นิวเมติกทั้งหมดทำงานที่ความดันเดียวกัน หรือที่ความแตกต่างของความดันระหว่างอุปกรณ์มีขนาดเล็กพอที่จะรองรับด้วยตัวจำกัดรูเจาะตายตัวแทนที่จะเป็นตัวควบคุมความดัน ที่ความต้องการการไหลรวมมีความสม่ำเสมอพอที่การลดความดันในการจ่ายสามารถคาดการณ์ได้และยอมรับได้ ที่ความง่ายในการบำรุงรักษาและการเปลี่ยนไส้กรองที่จุดเดียวเป็นลำดับความสำคัญในการปฏิบัติงานและที่ซึ่งการจัดวางเครื่องจักรมีการรวมอุปกรณ์นิวเมติกไว้ใกล้กับ FRL เพียงพอที่ความดันจ่ายที่ลดลงจะอยู่ในขอบเขตที่ยอมรับได้.

การประยุกต์ใช้งานที่เหมาะสมสำหรับระบบ FRL แบบรวมศูนย์
- 🏭 เครื่องจักรนิวเมติกแบบง่าย — กระบอกสูบทั้งหมดมีความดันเท่ากัน
- 🔧 สถานีเครื่องมือลม — ทุกเครื่องมือใช้แรงดันที่กำหนดเดียวกัน
- 📦 เครื่องจักรบรรจุภัณฑ์ — แรงดันคงที่ตลอดรอบการทำงาน
- ⚙️ ระบบนิวแมติกส์สำหรับสายพานลำเลียง — ตัวกระตุ้นที่ทำงานภายใต้แรงดันคงที่
- 🚗 การจับยึดอุปกรณ์ — คลิปทั้งหมดที่แรงกดยึดเท่ากัน
- 🏗️ ระบบอัตโนมัติทั่วไป — มาตรฐาน 5–6 บาร์ทั่วทั้งระบบ
- 🔩 แหล่งจ่ายวาล์วไอส์แลนด์ — วาล์วที่ติดตั้งบนแมนิโฟลด์ที่แรงดันเดียวกัน
การเลือก FRL แบบรวมศูนย์ตามสภาพของระบบ
| สภาพระบบ | FRL แบบรวมศูนย์ ถูกต้องหรือไม่? |
|---|---|
| อุปกรณ์ทั้งหมดที่ความดันเท่ากัน | ✅ ใช่ — การตั้งค่าเดียวใช้ได้ทั้งหมด |
| ความแตกต่างของความดัน < 0.5 บาร์ ระหว่างอุปกรณ์ | ✅ ใช่ — ตัวจำกัดแบบตายตัวสามารถชดเชยได้ |
| ท่อจ่าย < 2 เมตร ไปยังอุปกรณ์ที่ไกลที่สุด | ✅ ใช่ — การกระจายตัวลดลงน้อยมาก |
| ความต้องการที่สม่ำเสมอ — ไม่มีการกระทำพร้อมกันจำนวนมาก | ✅ ใช่ — ไม่มีการลดลงของความต้องการอย่างมีนัยสำคัญ |
| ความง่ายในการบำรุงรักษาเป็นสิ่งสำคัญอันดับแรก | ✅ ใช่ — องค์ประกอบเดียว, ชามเดียว |
| อุปกรณ์ทั้งหมดทนต่อการเปลี่ยนแปลงความดัน ±0.3 บาร์ | ✅ ใช่ — การกำกับดูแลแบบรวมศูนย์เพียงพอ |
| อุปกรณ์ต้องการแรงดันที่แตกต่างกัน (> 0.5 บาร์) | ❌ ต้องใช้ที่จุดใช้งาน |
| อุปกรณ์สำคัญต้องการความเสถียรที่ ±0.1 บาร์ | ❌ ต้องใช้ที่จุดใช้งาน |
| การกระจายสัญญาณในระยะไกล (> 5 เมตร ไปยังอุปกรณ์) | ⚠️ ตรวจสอบการกระจายสินค้า |
| เหตุการณ์ความต้องการพร้อมกันจำนวนมาก | ⚠️ ตรวจสอบการลดลงของความต้องการที่อุปกรณ์สำคัญ |
การกำหนดขนาด FRL แบบรวมศูนย์ — วิธีการที่ถูกต้อง
การกำหนดขนาด FRL แบบรวมศูนย์ต้องใช้การคำนวณสามขั้นตอน ซึ่งคู่มือการเลือกส่วนใหญ่มักจะลดเหลือเพียงการค้นหาค่าสัมประสิทธิ์การไหลเพียงค่าเดียว:
ขั้นตอนที่ 1 — ความต้องการการไหลสูงสุดทั้งหมด:
ที่ไหน คือ ปัจจัยความพร้อมกัน2 สำหรับอุปกรณ์ (สัดส่วนของอุปกรณ์ที่ทำงานพร้อมกัน).
ขั้นตอนที่ 2 — ความสามารถในการไหลของ FRL ที่ความดันการทำงาน:
เลือก FRL พร้อม ≥ ค่าที่คำนวณได้ ณ ความดันตกคร่อมสูงสุดที่ยอมรับได้ (โดยทั่วไป 0.1–0.2 บาร์ที่ FRL).
ขั้นตอนที่ 3 — ความจุของตัวกรอง:
เลือกความจุของชาม ≥ อัตราการควบแน่น × ช่วงเวลาการระบาย (โดยมีค่าเผื่อความปลอดภัย 2 เท่า).
ระบบ FRL แบบรวมศูนย์ — การตั้งค่าความดันที่ถูกต้อง
FRL แบบรวมศูนย์ต้องตั้งค่าให้ตอบสนองอุปกรณ์ที่มีความดันสูงสุดบวกกับการสูญเสียในการจ่าย:
| องค์ประกอบ | ค่าทั่วไป |
|---|---|
| ความดันอุปกรณ์สูงสุด | เฉพาะสำหรับแอปพลิเคชัน |
| การลดลงของการกระจายสูงสุด | 0.1–0.3 บาร์ |
| การลดลงของความต้องการสูงสุด | 0.2–0.6 บาร์ |
| ขอบเขตความปลอดภัย | 0.3–0.5 บาร์ |
| จุดตั้งค่า FRL รวม | อุปกรณ์สูงสุด + 0.6–1.4 บาร์ |
ผลของการคำนวณนี้: หากอุปกรณ์ที่มีแรงดันสูงสุดของคุณต้องการ 5 บาร์ และแรงดันที่ลดลงจากการกระจายและการใช้งานรวมกัน 1 บาร์ FRL ของคุณจะต้องตั้งค่าไว้ที่ 6 บาร์ — และทุกอุปกรณ์ที่ต้องการแรงดันน้อยกว่า 5 บาร์จะได้รับแรงดัน 5 บาร์ (ลบด้วยแรงดันที่ลดลงจากการกระจาย) ซึ่งทำงานที่แรงดันสูงกว่าที่กำหนดไว้ ทำให้ใช้ลมมากกว่าที่จำเป็น และอาจทำงานนอกขอบเขตของข้อกำหนดประสิทธิภาพนี่คือสภาพที่ทำให้เกิดความเสียหายของชิ้นส่วนและการไม่สอดคล้องกับแรงบิดของเหม่ย-หลิงในเซินเจิ้น — และสภาพที่การควบคุมที่จุดใช้งานสามารถแก้ไขได้.
ลาร์ส วิศวกรออกแบบเครื่องจักรที่โรงงานผลิตวาล์วไฮดรอลิกในเมืองโกเธนเบิร์ก ประเทศสวีเดน ใช้ระบบ FRL แบบรวมศูนย์สำหรับอุปกรณ์ยึดจับทั้งหมดของเขา — อุปกรณ์ยึดจับทุกชิ้นใช้แรงกดยึด 5.5 บาร์เท่ากัน การเดินท่อจ่ายอยู่ภายใต้ระยะไม่เกิน 1.5 เมตร ความต้องการใช้งานเป็นแบบลำดับ (ไม่เคยใช้งานพร้อมกัน) และความแตกต่างของแรงดันที่อุปกรณ์ยึดจับแต่ละจุดไม่เกิน 0.15 บาร์ระบบ FRL แบบรวมศูนย์ของเขาสามารถจ่ายอากาศที่ปรับให้เหมาะสมได้ตามความต้องการของแอปพลิเคชันของเขาอย่างแม่นยำ พร้อมด้วยไส้กรองเพียงชิ้นเดียวสำหรับการเปลี่ยน และถังเก็บน้ำเพียงใบเดียวสำหรับการระบาย 💡
แอปพลิเคชันใดบ้างที่ต้องการตัวควบคุมแรงดันที่จุดใช้งานเพื่อให้ได้ประสิทธิภาพที่เชื่อถือได้?
ตัวควบคุมแรงดันที่จุดใช้งานช่วยแก้ปัญหาการควบคุมแรงดันที่ตัวควบคุมกลางไม่สามารถแก้ไขได้ — และในกรณีที่มีการเกิดปัญหาเหล่านี้ ตัวควบคุมแรงดันที่จุดใช้งานไม่ใช่ตัวเลือก แต่เป็นข้อกำหนดทางฟังก์ชันเพื่อให้กระบวนการเป็นไปตามมาตรฐาน 🎯
ตัวปรับแรงดันที่จุดใช้งานจำเป็นต้องใช้สำหรับการใช้งานใด ๆ ที่อุปกรณ์แต่ละตัวต้องทำงานที่แรงดันต่างจากแหล่งจ่ายกลาง ที่ต้องรักษาเสถียรภาพของแรงดันที่อุปกรณ์เฉพาะให้อยู่ในขอบเขตที่แคบกว่าที่ระบบกลางสามารถให้ได้ ที่ประสิทธิภาพของอุปกรณ์มีความไวต่อการเปลี่ยนแปลงของแรงดันที่เกิดจากอุปกรณ์อื่น ๆ บนแหล่งจ่ายเดียวกัน และที่การเพิ่มประสิทธิภาพการใช้ลมอัดต้องการให้แต่ละอุปกรณ์ทำงานที่แรงดันต่ำสุดที่ต้องการแทนที่จะเป็นแรงดันสูงสุดที่อุปกรณ์ใด ๆ ในระบบต้องการ.

แอปพลิเคชันที่ต้องการตัวปรับแรงดันที่จุดใช้งาน
| การสมัคร | ทำไมการควบคุมที่จุดใช้งานจึงจำเป็น |
|---|---|
| เครื่องมือแรงบิดนิวเมติก | การสอบเทียบแรงบิดขึ้นอยู่กับความดัน — ค่าความคลาดเคลื่อน ±0.1 บาร์ |
| การพ่นสี / การทำให้เป็นละออง | ความดันในการพ่นละอองกำหนดขนาดของละอองและคุณภาพของผิวสำเร็จ |
| เครื่องกำเนิดสุญญากาศ | สุญญากาศที่เหมาะสมที่แรงดันป้อนเข้าเฉพาะ — แรงดันเกินจะสิ้นเปลืองอากาศ |
| กระบอกลมนิวแมติกความแม่นยำสูง | แรงดันขาออกขึ้นอยู่กับแรง — แรงยึดจับของฟิกซ์เจอร์มีความสำคัญอย่างยิ่ง |
| เครื่องถ่วงสมดุลแบบนิวเมติก | แรงดันสมดุลต้องตรงกับน้ำหนักบรรทุก — เปลี่ยนแปลงตามชิ้นงาน |
| อุปกรณ์ทดสอบที่ไวต่อแรงกด | แรงดันทดสอบต้องแม่นยำ — ข้อกำหนดการสอบเทียบ |
| หัวฉีดเป่าลม (การบริโภคอากาศ) | แรงดันต่ำสุดสำหรับงาน — แรงดันเกินทำให้สิ้นเปลืองอากาศ |
| วาล์วจ่ายน้ำมันสำหรับระบบทดลอง | แรงดันนำร่องคงที่โดยไม่ขึ้นอยู่กับความต้องการของระบบหลัก |
| ระบบจ่ายอากาศหายใจ | ควบคุมตามข้อกำหนดของแรงดันทางเข้าวาล์วควบคุมความต้องการ |
| นิวเมติก การควบคุมแบบสัดส่วน3 | ความเสถียรของแรงดันต้นทางที่จำเป็นสำหรับความแม่นยำแบบสัดส่วน |
ประเภทของตัวปรับแรงดันที่จุดใช้งานสำหรับการใช้งานที่แตกต่างกัน
| ประเภทของตัวควบคุม | หลักการการทำงาน | แอปพลิเคชันที่ดีที่สุด |
|---|---|---|
| ตัวควบคุมขนาดเล็กมาตรฐาน | ไดอะแฟรมแบบสปริง | การใช้งานทั่วไป — ส่วนใหญ่ใช้ตามจุดใช้งาน |
| ตัวควบคุมความแม่นยำสูง (ความไวสูง) | ไดอะแฟรมขนาดใหญ่, ภาวะฮิสเทอรีซิสต่ำ | เครื่องมือวัดแรงบิด, สเปรย์, อุปกรณ์ทดสอบ |
| ตัวควบคุมแรงดันย้อนกลับ | รักษาแรงดันในทิศทางขาขึ้น | การบรรเทาความดัน, การควบคุมแรงดันย้อนกลับ |
| ตัวควบคุมที่ทำงานด้วยระบบนักบิน | แรงดันของตัวนำกำหนดเอาต์พุต | การตั้งค่าความดันระยะไกล, การไหลสูง |
| ตัวควบคุมแบบสัดส่วนอิเล็กทรอนิกส์ | การควบคุมความดันอิเล็กทรอนิกส์ | การวัดความดันแบบอัตโนมัติ |
| การควบคุมการไหลแบบชดเชยความดัน | ความดันรวม + การไหล | ความเร็วของกระบอกสูบไม่ขึ้นอยู่กับความดัน |
ตัวควบคุมแรงดัน ณ จุดใช้งาน — การวิเคราะห์ความเสถียรของแรงดัน
ความเสถียรของแรงดันที่ตัวควบคุมแรงดันใช้งาน ณ จุดใช้งานมอบให้ที่อุปกรณ์:
สำหรับตัวควบคุมขนาดเล็กที่มีความแม่นยำสูง (ฮิสเทอรีซิส4 = 0.02 บาร์, = 0.3):
| การเปลี่ยนแปลงของอุปทาน | การแปรผันของความดันของอุปกรณ์ (แบบรวมศูนย์) | การเปลี่ยนแปลงความดันของอุปกรณ์ (จุดใช้งาน) |
|---|---|---|
| ±0.5 บาร์ แหล่งจ่าย | ±0.5 บาร์ ที่อุปกรณ์ | ✅ ±0.03 บาร์ ที่อุปกรณ์ |
| ±0.3 บาร์ ความต้องการลดลง | ±0.3 บาร์ ที่อุปกรณ์ | ✅ ±0.02 บาร์ ที่อุปกรณ์ |
| ±0.8 บาร์ ความแปรปรวนทั้งหมด | ±0.8 บาร์ ที่อุปกรณ์ | ✅ ±0.05 บาร์ ที่อุปกรณ์ |
นี่คือเหตุผลเชิงปริมาณว่าทำไมเครื่องมือแรงบิดของ Mei-Ling จึงต้องการการควบคุมที่จุดใช้งาน — ความแปรปรวนของแหล่งจ่ายแบบรวมศูนย์ของเธอที่ ±0.6 บาร์ ทำให้เกิดแรงดันที่ ±0.6 บาร์ที่ทางเข้าเครื่องมือ ส่งผลให้เกิดความแปรปรวนของแรงบิด ±18% ตัวควบคุมแรงดันที่จุดใช้งานของเธอช่วยลดความแปรปรวนนี้เหลือ ±0.05 บาร์ ทำให้เกิดความแปรปรวนของแรงบิด ±1.5% ซึ่งอยู่ภายในข้อกำหนดแรงบิดของตัวยึดที่ ±3% ของเธอ.
การเพิ่มประสิทธิภาพการใช้ลมอัด — กรณีศึกษาด้านพลังงานสำหรับจุดใช้งาน
ทุกอุปกรณ์ที่ทำงานเกินความดันขั้นต่ำที่ต้องการ อากาศอัดจากของเสีย5:
การคำนวณของเสียในทางปฏิบัติ — เครื่องกำเนิดสุญญากาศของเหม่ยหลิง:
| พารามิเตอร์ | รวมศูนย์ (5 บาร์) | จุดใช้งาน (3.5 บาร์) |
|---|---|---|
| แรงดันของอุปทาน | 5 บาร์ | 3.5 บาร์ |
| เครื่องกำเนิดสูญญากาศ | 120 นล./นาที | 84 ลูกบาศก์เมตรต่อนาที |
| พลังงานของคอมเพรสเซอร์ (กะ 8 ชั่วโมง) | 100% ฐานข้อมูลเริ่มต้น | 70% ของข้อมูลพื้นฐาน |
| ค่าใช้จ่ายพลังงานรายปี | $$$ | $$ ✅ |
| การประหยัดรายปีต่อเครื่องกำเนิดสุญญากาศ | — | 30% ของค่าใช้จ่ายพลังงานของอุปกรณ์ |
การลดการใช้ลมอัดทั่วทั้งระบบด้วยการปรับแรงดันที่จุดใช้งาน:
สำหรับเครื่องจักรที่มีอุปกรณ์ 8 ชิ้นที่ทำงานที่แรงดันต่าง ๆ ต่ำกว่าค่ามาตรฐาน 6 บาร์ การประหยัดพลังงานโดยทั่วไปอยู่ที่ 15–35% ของปริมาณการใช้ลมอัดทั้งหมด — ซึ่งเป็นกรณีทางพลังงานที่คุ้มค่าสำหรับการลงทุนในตัวปรับแรงดันลมที่จุดใช้งานในเครื่องจักรที่มีความซับซ้อนปานกลางส่วนใหญ่.
ข้อกำหนดการติดตั้งตัวปรับแรงดัน ณ จุดใช้งาน
| ข้อกำหนด | ข้อกำหนด | ผลที่ตามมาหากเพิกเฉย |
|---|---|---|
| แรงดันขาเข้า > จุดตั้งค่า + 0.5 บาร์ | ✅ ค่าความแตกต่างขั้นต่ำสำหรับการกำกับดูแล | หน่วยงานกำกับดูแลสูญเสียอำนาจ — ความกดดันลดลง |
| ติดตั้งที่ทางเข้าของอุปกรณ์ — ไม่ใช่ที่ระยะไกล | ✅ ลดการต่อท่อระหว่างตัวควบคุมและอุปกรณ์ให้น้อยที่สุด | การลดลงของการกระจายสินค้าทำลายประโยชน์ของการกำกับดูแล |
| เกจวัดความดันที่ทางออกของตัวควบคุม | ✅ การตรวจสอบด้วยภาพของจุดตั้งค่า | จุดตั้งค่าเคลื่อนที่โดยไม่ถูกตรวจพบ |
| การปรับแบบล็อคได้ (ป้องกันการงัดแงะ) | ✅ สำหรับการใช้งานที่ต้องการการปรับเทียบ | การปรับแก้โดยไม่ได้รับอนุญาตทำให้เกิดความไม่สอดคล้อง |
| กรองอยู่ต้นทางของตัวควบคุมความแม่นยำ | ✅ การปนเปื้อนทำให้ไดอะแฟรมเสียหาย | ความเสียหายของที่นั่งตัวควบคุม — ความไม่เสถียรของแรงดัน |
| ระบาย — หากตัวควบคุมมีตัวกรองในตัว | ✅ ควรมีระบบระบายน้ำแบบกึ่งอัตโนมัติ | น้ำล้นชาม — น้ำไหลไปทางปลายน้ำ |
เครื่องควบคุมแรงดันแบบรวมศูนย์และแบบจุดใช้งานเปรียบเทียบกันอย่างไรในด้านความเสถียรของแรงดัน คุณภาพอากาศ และต้นทุนรวม?
การเลือกสถาปัตยกรรมมีผลต่อความเสถียรของแรงดันในอุปกรณ์, การบริโภคอากาศอัด, ภาระการบำรุงรักษา, ค่าใช้จ่ายในการติดตั้ง, และค่าใช้จ่ายทั้งหมดที่เกี่ยวข้องกับการไม่สอดคล้องของกระบวนการที่เกี่ยวข้องกับแรงดัน — ไม่ใช่เพียงแค่ราคาซื้อของชิ้นส่วนการควบคุมเท่านั้น. 💸
ระบบ FRL แบบรวมศูนย์ช่วยลดต้นทุนของชิ้นส่วน ลดความซับซ้อนในการบำรุงรักษา และควบคุมแรงดันได้อย่างเพียงพอสำหรับการใช้งานที่ต้องการแรงดันคงที่ — แต่ไม่สามารถให้ความอิสระของแรงดันในระดับอุปกรณ์แต่ละตัว ไม่สามารถปรับการใช้ลมอัดให้เหมาะสมระหว่างอุปกรณ์ที่ใช้แรงดันต่างกันได้ และไม่สามารถรักษาค่าความคลาดเคลื่อนของแรงดันที่เข้มงวดที่อุปกรณ์ซึ่งได้รับผลกระทบจากความผันผวนของแหล่งจ่ายร่วมจากความต้องการใช้งานที่แชร์กันตัวปรับแรงดันที่จุดใช้งานมีต้นทุนของชิ้นส่วนและการติดตั้งที่สูงกว่า แต่ให้ความเสถียรของแรงดันในระดับอุปกรณ์ การปรับการใช้ลมอัดให้เหมาะสม และการปฏิบัติตามกระบวนการซึ่งตัวปรับแรงดันแบบรวมศูนย์ไม่สามารถทำได้ในแอปพลิเคชันที่ต้องการแรงดันหลายระดับหรือแอปพลิเคชันที่ไวต่อแรงดัน.
ความเสถียรของแรงดัน, คุณภาพอากาศ, และการเปรียบเทียบต้นทุน
| ปัจจัย | ระบบควบคุมแรงดันอากาศแบบรวมศูนย์ | ตัวปรับแรงดัน ณ จุดใช้งาน |
|---|---|---|
| ความยืดหยุ่นในการตั้งค่าความดัน | ตั้งค่าเดียวสำหรับทุกอุปกรณ์ | ✅ การตั้งค่าเฉพาะรายบุคคลต่ออุปกรณ์ |
| ความสามารถในการรองรับแรงดันหลายระดับ | ❌ ใช้แรงดันเดียวเท่านั้น | ✅ อุปกรณ์แต่ละชิ้นทำงานที่แรงดันที่เหมาะสม |
| ความเสถียรของแรงดันที่อุปกรณ์ | ±0.3–0.8 บาร์ (ขึ้นอยู่กับความต้องการ) | ✅ ±0.02–0.05 บาร์ (ชนิดความแม่นยำ) |
| การปฏิเสธความผันผวนของอุปทาน | ❌ แพร่กระจายไปยังอุปกรณ์ | ✅ ถูกดูดซับโดยหน่วยงานกำกับดูแล |
| การแยกการลดลงของความต้องการ | ❌ แชร์โดยทุกอุปกรณ์ | ✅ อุปกรณ์แต่ละชิ้นแยกออกจากกัน |
| การเพิ่มประสิทธิภาพการใช้ลมอัด | ❌ ทุกอย่างต้องอยู่ในความดันสูงสุดตามที่กำหนด | ✅ แต่ละจุดต้องมีแรงดันตามที่กำหนดขั้นต่ำ |
| การใช้พลังงาน | สูงขึ้น — แรงดันเกินในอุปกรณ์ทั้งหมด | ✅ ต่ำกว่า — ประหยัดโดยทั่วไป 15–35% |
| ตำแหน่งของตัวกรอง | รวมศูนย์ — หนึ่งองค์ประกอบ | รวมศูนย์ + เลือกใช้ได้ต่ออุปกรณ์ |
| ตำแหน่งของเครื่องหล่อลื่น | รวมศูนย์ — หนึ่งหน่วย | รวมศูนย์ + เลือกใช้ได้ต่ออุปกรณ์ |
| คุณภาพอากาศที่อุปกรณ์ | คุณภาพแบบรวมศูนย์ — การกระจายเพิ่มการปนเปื้อน | ✅ ตัวเลือกตัวกรองที่จุดใช้งาน |
| การบำรุงรักษา — องค์ประกอบของตัวกรอง | ✅ องค์ประกอบเดียว — เรียบง่าย | มีการเพิ่มตัวกรองแบบ if หลายรายการต่ออุปกรณ์ |
| การบำรุงรักษา — ตัวควบคุม | ✅ หน่วยเดียว | หลายหน่วย — หนึ่งหน่วยต่ออุปกรณ์ |
| การตรวจสอบไดอะแฟรมของตัวควบคุม | ✅ หนึ่งหน่วย | ต่ออุปกรณ์ — รวมทั้งหมดบ่อยขึ้น |
| ค่าใช้จ่ายในการติดตั้ง | ✅ ต่ำลง — หนึ่งหน่วย | สูงขึ้น — หลายหน่วยและการเชื่อมต่อ |
| ต้นทุนส่วนประกอบ | ✅ ต่ำกว่า | สูงขึ้น — หน่วยงานกำกับดูแลหลายแห่ง |
| ข้อกำหนดเกี่ยวกับมาตรวัดความดัน | ✅ เกจหนึ่งตัว | หนึ่งต่อหน่วยงานกำกับดูแล |
| การปรับที่ป้องกันการปลอมแปลง | ✅ หนึ่งหน่วยที่สามารถล็อกได้ | หนึ่งต่ออุปกรณ์ — หน่วยที่สามารถล็อกได้มากขึ้น |
| การปฏิบัติตามกระบวนการ — ความดันสม่ำเสมอ | ✅ เพียงพอ | ✅ ยอดเยี่ยม |
| การปฏิบัติตามกระบวนการ — หลายแรงดัน | ❌ ไม่สามารถบรรลุ | ✅ ข้อมูลจำเพาะถูกต้อง |
| ชุดซ่อมสำหรับตัวควบคุม (Bepto) | $ | 1 ต่อ 4 ต่อ ต่อ หน่วย |
| ไส้กรอง (เบปโต) | $ | $ (หากเป็นฟิลเตอร์ต่ออุปกรณ์) |
| ระยะเวลาดำเนินการ (Bepto) | 3–7 วันทำการ | 3–7 วันทำการ |
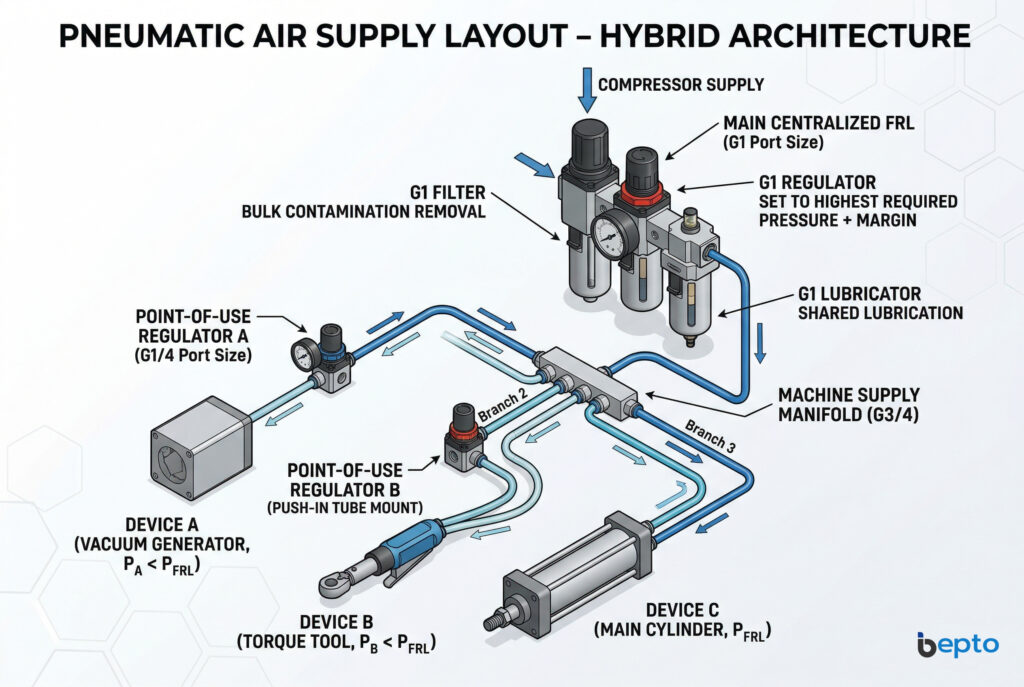
สถาปัตยกรรมไฮบริด — ทางเลือกที่เหมาะสมที่สุดสำหรับเครื่องจักรที่ซับซ้อน
เครื่องจักรที่มีความซับซ้อนระดับกลางถึงสูงส่วนใหญ่ได้รับประโยชน์จากสถาปัตยกรรมแบบไฮบริดที่ผสมผสานระบบควบคุมแรงดันอากาศแบบรวมศูนย์ (FRL) เข้ากับตัวควบคุมแรงดันอากาศที่จุดใช้งาน:
แผนผังระบบจ่ายอากาศอัด
ผังการจัดส่งอากาศระบบ FRL แบบรวมศูนย์
ประโยชน์ของสถาปัตยกรรมแบบไฮบริด:
- ✅ องค์ประกอบตัวกรองเดี่ยวสำหรับการกำจัดสิ่งปนเปื้อนจำนวนมาก
- ✅ เครื่องหล่อลื่นเดียวสำหรับอุปกรณ์ที่ต้องการหล่อลื่นทั้งหมด
- ✅ ปรับความดันให้เหมาะสมเป็นรายบุคคลต่ออุปกรณ์
- ✅ การแยกการผันผวนของแหล่งจ่ายไฟที่อุปกรณ์สำคัญแต่ละจุด
- ✅ ลดการใช้ลมอัดต่ออุปกรณ์ให้น้อยที่สุด
- ✅ การบำรุงรักษาที่รวมศูนย์ที่ FRL สำหรับตัวกรองและเครื่องหล่อลื่น
ต้นทุนรวมของการเป็นเจ้าของ — เปรียบเทียบ 3 ปี
สถานการณ์ที่ 1: เครื่องกลอย่างง่าย — อุปกรณ์ทั้งหมดอยู่ที่ความดันเดียวกัน
| องค์ประกอบต้นทุน | ระบบ FRL แบบรวมศูนย์เท่านั้น | ศูนย์กลาง + จุดใช้งาน |
|---|---|---|
| ต้นทุนหน่วย FRL | $ | $ |
| ค่าใช้จ่ายของตัวควบคุมที่จุดใช้งาน | ไม่มี | $$ (ไม่จำเป็น) |
| ค่าแรงติดตั้ง | $ | $$ |
| การบำรุงรักษา (3 ปี) | $ | $$ |
| กระบวนการจัดการความไม่สอดคล้อง | ✅ ไม่มี — แรงดันสม่ำเสมอเพียงพอ | ✅ ไม่มี |
| ค่าใช้จ่ายรวม 3 ปี | $$ ✅ | $$$ |
ข้อสรุป: ใช้ระบบ FRL แบบรวมศูนย์เท่านั้น — การติดตั้งที่จุดใช้งานเพิ่มต้นทุนโดยไม่มีประโยชน์.
สถานการณ์ที่ 2: เครื่องจักรหลายแรงดัน (การใช้งานของเมย์-หลิง)
| องค์ประกอบต้นทุน | ระบบ FRL แบบรวมศูนย์เท่านั้น | ศูนย์กลาง + จุดใช้งาน |
|---|---|---|
| ต้นทุนหน่วย FRL | $ | $ |
| ค่าใช้จ่ายของตัวควบคุมที่จุดใช้งาน | ไม่มี | $$ |
| ความเสียหายของชิ้นส่วน (แรงดันเกิน) | $$$$ ต่อเดือน | ไม่มี |
| การแก้ไขงานที่ไม่เป็นไปตามข้อกำหนดด้านแรงบิด | $$$$$ ต่อเดือน | ไม่มี |
| การสูญเสียอากาศอัด (ความดันเกิน) | $$$ ต่อเดือน | ✅ การลดขนาด 22% |
| ค่าใช้จ่ายรวม 3 ปี | $$$$$$$ | $$$ ✅ |
ข้อสรุป: ตัวควบคุมแรงดันที่จุดใช้งานคืนทุนได้ภายใน < 3 สัปดาห์ จากการลดความเสียหายและการแก้ไขงานซ้ำเพียงอย่างเดียว.
สถานการณ์ที่ 3: กระบวนการที่ไวต่อแรงดัน (พ่น, แรงบิด, ทดสอบ)
| องค์ประกอบต้นทุน | ระบบ FRL แบบรวมศูนย์เท่านั้น | จุดใช้งานที่อุปกรณ์สำคัญ |
|---|---|---|
| ความเสถียรของแรงดันที่อุปกรณ์ | ±0.6 บาร์ | ✅ ±0.03 บาร์ |
| อัตราการปฏิบัติตามกระบวนการ | 78% (การเปลี่ยนแปลงของความดัน) | ✅ 99.2% |
| ค่าเศษวัสดุและค่าปรับปรุงงานใหม่ | $$$$$$ | $ |
| การคืนสินค้าของลูกค้า | $$$$$ | ไม่มี |
| ค่าใช้จ่ายของตัวควบคุมที่จุดใช้งาน | ไม่มี | $$ |
| ค่าใช้จ่ายรวม 3 ปี | $$$$$$$$ | $$$ ✅ |
ที่ Bepto เราจัดหาชุดกรองอากาศ FRL แบบรวมศูนย์ในขนาดพอร์ตทุกขนาด (G1/8 ถึง G1) ตัวควบคุมขนาดเล็กสำหรับจุดใช้งาน (G1/8,G1/4, แบบติดตั้งท่อแบบกด), ตัวควบคุมความแม่นยำสูงพร้อมฮีสเตอร์รีซิส ±0.02 บาร์, ชุดซ่อมไดอะแฟรมและที่นั่งสำหรับตัวควบคุม, และชิ้นส่วนกรองทดแทนสำหรับผลิตภัณฑ์ FRL และตัวควบคุมของแบรนด์นิวเมติกชั้นนำทั้งหมด — พร้อมยืนยันความสามารถในการไหล, ช่วงความดัน, และความแม่นยำในการควบคุมสำหรับการใช้งานเฉพาะของคุณก่อนการจัดส่ง ⚡
บทสรุป
แผนผังทุกอุปกรณ์นิวเมติกบนเครื่องจักรของคุณตามสามพารามิเตอร์ก่อนกำหนดการควบคุมแบบรวมศูนย์หรือแบบจุดใช้งาน: ความดันที่แต่ละอุปกรณ์ต้องการ, ความทนทานต่อความเสถียรของความดันที่กระบวนการของอุปกรณ์แต่ละตัวต้องการ, และความแปรปรวนของความดันจ่ายที่แต่ละอุปกรณ์จะประสบจากการลดลงของการจ่ายและการเปลี่ยนแปลงของความต้องการที่ใช้ร่วมกัน กำหนดให้ใช้ FRL แบบรวมศูนย์เพียงอย่างเดียวสำหรับเครื่องจักรที่ทุกอุปกรณ์ทำงานที่ความดันเดียวกันภายใน ±0.3 บาร์ และความแปรปรวนของความดันจ่ายที่ยอมรับได้ที่ทุกอุปกรณ์ระบุตัวควบคุมแรงดันที่จุดใช้งาน (point-of-use regulators) ที่ทุกอุปกรณ์ที่ต้องการแรงดันแตกต่างจากแหล่งจ่ายกลาง ที่ทุกอุปกรณ์ที่การปฏิบัติตามกระบวนการต้องการความเสถียรของแรงดันที่เข้มงวดกว่าที่ระบบกลางสามารถให้ได้ และที่ทุกอุปกรณ์ที่การเกิดแรงดันเกินทำให้สูญเปล่าอากาศอัดในอัตราที่คุ้มค่ากับค่าใช้จ่ายของตัวควบคุมภายในระยะเวลาคืนทุนที่เหมาะสมสถาปัตยกรรมแบบไฮบริด — FRL แบบรวมศูนย์สำหรับการกรองและการหล่อลื่น, ตัวควบคุมแรงดันที่จุดใช้งานสำหรับการควบคุมแรงดันระดับอุปกรณ์ — มอบความง่ายในการบำรุงรักษาของการบำบัดแบบรวมศูนย์พร้อมกับความเป็นอิสระของแรงดันจากการควบคุมแบบกระจาย และเป็นการกำหนดค่าที่ถูกต้องสำหรับเครื่องจักรอุตสาหกรรมที่มีความซับซ้อนระดับปานกลางถึงสูงส่วนใหญ่ 💪
คำถามที่พบบ่อยเกี่ยวกับตัวควบคุม FRL แบบรวมศูนย์เทียบกับตัวควบคุมแบบจุดใช้งาน
คำถามที่ 1: ตัวควบคุม FRL แบบรวมศูนย์ของฉันมีความแม่นยำตามที่ระบุไว้ที่ ±0.1 บาร์ — ทำไมความแปรผันของความดันที่อุปกรณ์ปลายทางของฉันจึงมากกว่า ±0.1 บาร์?
ข้อกำหนดความแม่นยำของตัวควบคุม (±0.1 บาร์) อธิบายถึงความเสถียรของสัญญาณขาออกของตัวควบคุมที่พอร์ตขาออกภายใต้สภาวะการไหลคงที่ภายในช่วงการไหลที่กำหนด ความแปรผันของแรงดันที่อุปกรณ์ปลายทางของคุณเป็นผลรวมของความแม่นยำของตัวควบคุมบวกกับความแปรผันของการลดลงของแรงดันจากการกระจายตัวที่เกิดจากการเปลี่ยนแปลงอัตราการไหลในท่อระหว่างตัวควบคุมและอุปกรณ์หากอุปกรณ์ของคุณใช้แรง 100 Nl/นาที ในระหว่างการกระตุ้นและมีการไหลเกือบเป็นศูนย์เมื่อหยุดนิ่ง ความดันที่ลดลงในท่อจ่ายจะเปลี่ยนแปลงตามปริมาณที่ขึ้นอยู่กับอัตราการไหลทั้งหมดระหว่างสถานะเหล่านี้ — ความแปรปรวนนี้ถูกเพิ่มเข้าไปในความแปรปรวนของความแม่นยำของตัวควบคุมและไม่สามารถควบคุมได้โดยตัวควบคุม ตัวควบคุมที่ติดตั้งที่จุดใช้งานซึ่งติดตั้งที่ทางเข้าของอุปกรณ์จะขจัดความแปรปรวนของการลดลงในการจ่ายเนื่องจากมันควบคุมที่อุปกรณ์ ไม่ใช่ที่ทางเข้าของเครื่องจักร.
คำถามที่ 2: ฉันสามารถใช้ตัวปรับแรงดันที่จุดใช้งานเพื่อเพิ่มแรงดันให้สูงกว่าค่าที่ตั้งไว้ของ FRL แบบรวมศูนย์สำหรับอุปกรณ์เฉพาะที่ต้องการแรงดันสูงกว่าได้หรือไม่?
ไม่ใช่ — ตัวควบคุมแรงดันมาตรฐานสามารถลดแรงดันได้เพียงต่ำกว่าแรงดันที่จ่ายเข้าเท่านั้น ไม่สามารถเพิ่มแรงดันให้สูงกว่าแรงดันที่จ่ายได้ หากอุปกรณ์เฉพาะต้องการแรงดันที่สูงกว่าที่ตัวควบคุมแรงดันรวมศูนย์ (FRL) ตั้งไว้ คุณจะต้องปรับค่าตั้งต้นของตัวควบคุมแรงดันรวมศูนย์ให้สูงขึ้น (ซึ่งจะเพิ่มแรงดันให้กับทุกอุปกรณ์) หรือติดตั้งตัวเพิ่มแรงดัน (ตัวเสริมแรงดัน) สำหรับอุปกรณ์นั้นโดยเฉพาะในทางปฏิบัติ วิธีการที่ถูกต้องคือการตั้งค่า FRL แบบรวมศูนย์ให้อยู่ที่ความดันสูงสุดที่อุปกรณ์ใด ๆ ต้องการ จากนั้นใช้ตัวปรับความดันที่จุดใช้งานเพื่อลดความดันสำหรับอุปกรณ์ที่ต้องการความดันน้อยกว่า — ซึ่งเป็นสถาปัตยกรรมแบบไฮบริดที่ได้กล่าวไว้ในบทความนี้.
คำถามที่ 3: ชุดซ่อมตัวควบคุม Bepto สามารถใช้ร่วมกับตัวควบคุม FRL แบบรวมศูนย์และตัวควบคุมขนาดเล็กสำหรับจุดใช้งานเฉพาะของยี่ห้อเดียวกันได้หรือไม่?
ชุดซ่อมสำหรับตัวควบคุม Bepto เป็นแบบเฉพาะรุ่น — ขนาดของไดอะแฟรม, ที่นั่งวาล์ว, และสปริงจะแตกต่างกันระหว่างตัวควบคุม FRL แบบรวมศูนย์ (ซึ่งรองรับอัตราการไหลที่สูงกว่าและใช้ชุดไดอะแฟรมขนาดใหญ่กว่า) และตัวควบคุมขนาดเล็กสำหรับจุดใช้งาน (ซึ่งใช้ชุดไดอะแฟรมและที่นั่งขนาดเล็กกว่าที่ปรับให้เหมาะสมกับการไหลต่ำและการติดตั้งที่กะทัดรัด)โปรดระบุยี่ห้อ รุ่น หมายเลข และขนาดพอร์ตของตัวควบคุมทุกครั้งเมื่อสั่งซื้อชุดซ่อม ทีมเทคนิคของ Bepto จะยืนยันวัสดุของไดอะแฟรม (มาตรฐาน NBR, EPDM สำหรับงานน้ำ, FKM สำหรับการสัมผัสสารเคมี) วัสดุของที่นั่ง และอัตราความแข็งของสปริงให้ถูกต้องตามรุ่นตัวควบคุมของคุณก่อนการจัดส่ง.
คำถามที่ 4: ฉันจะกำหนดค่าตั้งต้นที่ถูกต้องสำหรับ FRL แบบรวมศูนย์ได้อย่างไร เมื่อฉันกำลังเพิ่มตัวควบคุมที่จุดใช้งานเข้ากับเครื่องจักรที่มีอยู่แล้ว?
ตั้งค่าตัวควบคุม FRL แบบรวมศูนย์ให้สูงกว่าจุดใช้งานสูงสุดที่ตั้งไว้บวกกับการลดแรงดันสูงสุดในการกระจายบวกกับแรงดันต่างขั้นต่ำที่จำเป็นโดยตัวควบคุมที่จุดใช้งาน (โดยทั่วไปคือ 0.5–1.0 บาร์)ตัวอย่างเช่น: หากตัวควบคุมแรงดันสูงสุดที่จุดใช้งานของคุณตั้งไว้ที่ 5 บาร์ ความดันตกคร่อมสูงสุดในการจ่ายคือ 0.3 บาร์ และตัวควบคุมแรงดันที่จุดใช้งานของคุณต้องการความต่างแรงดัน 0.7 บาร์ ให้ตั้งค่า FRL แบบรวมศูนย์ไว้ที่ 5 + 0.3 + 0.7 = 6 บาร์ตรวจสอบว่าการตั้งค่านี้สามารถรักษาปริมาณการจ่ายที่เพียงพอให้กับตัวควบคุมทุกจุดใช้งานภายใต้สภาวะความต้องการพร้อมกันที่เลวร้ายที่สุด — วัดความดันการจ่ายที่ทางเข้าของตัวควบคุมที่ใช้งานอยู่ไกลที่สุดในช่วงความต้องการสูงสุด และยืนยันว่าความดันยังคงอยู่เหนือจุดตั้งค่าของตัวควบคุมบวกกับความแตกต่างขั้นต่ำ.
คำถามที่ 5: ความดันของตัวควบคุมที่จุดใช้งานของฉันเพิ่มขึ้นเรื่อยๆ โดยไม่มีการปรับแต่งใดๆ — สาเหตุคืออะไรและฉันจะปรับให้กลับสู่การควบคุมที่เสถียรได้อย่างไร?
การเพิ่มขึ้นของแรงดันในตัวควบคุมที่จุดใช้งาน (regulator) มักเกิดจากที่นั่งวาล์วที่ปนเปื้อนหรือสึกหรอ ซึ่งทำให้แรงดันจ่ายสามารถรั่วผ่านวาล์วที่ปิดอยู่เข้าสู่ทางออกที่ถูกควบคุมได้ — ตัวควบคุมไม่สามารถปิดสนิทได้อีกต่อไป และแรงดันจ่ายจะค่อยๆ เพิ่มแรงดันทางออกให้สูงกว่าจุดที่ตั้งไว้ นี่คือรูปแบบความล้มเหลวจากการสึกหรอหลักสำหรับตัวควบคุมขนาดเล็กในระบบอากาศที่ปนเปื้อนการซ่อมที่ถูกต้องคือการใช้ชุดซ่อมตัวควบคุม (regulator rebuild kit) เพื่อเปลี่ยนที่นั่งวาล์ว (valve seat), ไดอะแฟรม (diaphragm), และโอริง (O-rings) — ชุดซ่อม Bepto ช่วยฟื้นฟูประสิทธิภาพการซีลเหมือนโรงงานผลิต — เพื่อป้องกันการเกิดปัญหาซ้ำ ให้ติดตั้งตัวกรองก่อนถึงตัวควบคุมที่จุดใช้งาน (point-of-use regulator) หากยังไม่มีตัวกรองติดตั้งไว้ — การปนเปื้อนของอนุภาค (particulate contamination) เป็นสาเหตุหลักของการสึกหรอของที่นั่งวาล์วในตัวควบคุมขนาดเล็ก ⚡
-
อธิบายสมการพลศาสตร์ของไหลพื้นฐานที่ใช้ในการคำนวณความดันที่ลดลงในท่อจ่าย. ↩
-
รายละเอียดวิธีการทางวิศวกรรมสำหรับการคำนวณความต้องการสูงสุดพร้อมกันของปริมาณการไหลในเครื่องจักรอัตโนมัติ. ↩
-
สำรวจว่าเทคโนโลยีการวัดแบบสัดส่วนอิเล็กทรอนิกส์สามารถสร้างโปรไฟล์ความดันที่แม่นยำและอัตโนมัติได้อย่างไร. ↩
-
กำหนดวิธีที่ฮิสเทอรีซิสเชิงกลส่งผลต่อความแม่นยำและความสามารถในการทำซ้ำของวาล์วควบคุมความดัน. ↩
-
ให้ข้อมูลอุตสาหกรรมเกี่ยวกับการสูญเสียพลังงานและผลกระทบต่อค่าใช้จ่ายที่เกี่ยวข้องกับการอัดอากาศเกินในระบบนิวเมติกส์. ↩
