

التباطؤ1 هو القاتل الدقيق غير المرئي الكامن في كل نظام مشغل نسبي — يدمر بصمت دقة تحديد المواقع بما يصل إلى 15% بينما يلقي المهندسون باللوم على كل شيء باستثناء الجاني الحقيقي. تؤدي هذه الظاهرة إلى “تذكر” المشغلات لمواقعها السابقة، مما يخلق مناطق ميتة غير متوقعة تحول التحكم السلس إلى تباين محبط. 😠
يؤدي التباطؤ في التحكم النسبي بالمشغل إلى حدوث أخطاء في تحديد الموضع تتراوح بين 2 و 15% من السكتة الكاملة بسبب التباطؤ الميكانيكي، واحتكاك السدادة، والتأثيرات المغناطيسية، والمناطق الميتة في صمام التحكم، مما يتطلب تعويضًا من خلال خوارزميات البرامج، والتحميل الميكانيكي المسبق، وردود الفعل عالية الدقة، واختيار المكونات المناسبة لتحقيق دقة تحديد الموضع أقل من 1%.
قبل شهرين، عملت مع جينيفر، مهندسة تحكم في منشأة تصنيع طيران في سياتل، حيث كانت روبوتات التجميع الدقيقة الخاصة بها تخطئ الأهداف بمقدار 3 مم بشكل مستمر — ليس بشكل عشوائي، ولكن بنمط يمكن التنبؤ به يشير إلى وجود تباطؤ. بعد تطبيق حلول Bepto المضادة للتباطؤ، انخفضت أخطاء تحديد المواقع إلى أقل من 0.5 مم. ✈️
جدول المحتويات
- ما هو التباطؤ بالضبط ولماذا يحدث في المشغلات النسبية؟
- كيف يؤثر التباطؤ على أنواع مختلفة من أنظمة التحكم النسبي؟
- ما هي تقنيات القياس الأفضل لتحديد وتقدير تأثيرات التباطؤ؟
- ما هي أكثر الطرق فعالية لتقليل التباطؤ في نظامك؟
ما هو التباطؤ بالضبط ولماذا يحدث في المشغلات النسبية؟
فهم آليات التباطؤ أمر ضروري لتحقيق تحكم نسبي دقيق في أنظمة المشغلات الهوائية والهيدروليكية.
يحدث التباطؤ عندما يعتمد موضع خرج المشغل على كل من أمر الإدخال الحالي وسجل الموضع السابق، مما يخلق مسارات استجابة مختلفة للأوامر المتزايدة مقابل الأوامر المتناقصة بسبب رد الفعل الميكانيكي وقوى الاحتكاك والتأثيرات المغناطيسية ونطاقات الصمامات الميتة التي تتراكم في جميع أنحاء حلقة التحكم.
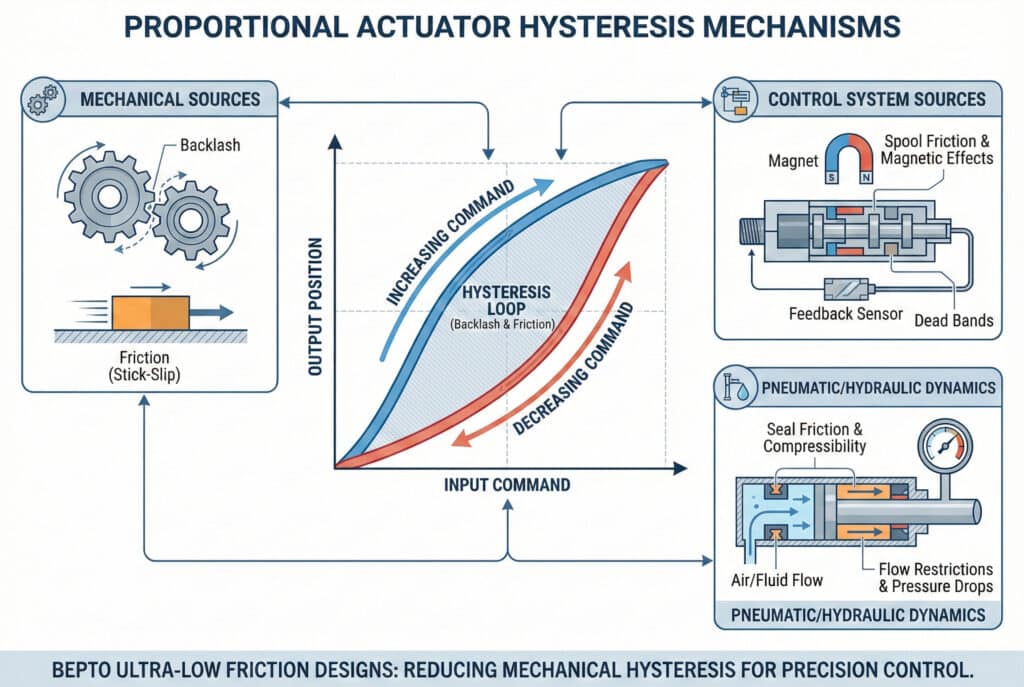
آليات التباطؤ الأساسية
المصادر الميكانيكية
تساهم المكونات الفيزيائية بشكل كبير في تباطؤ النظام:
- رد الفعل العكسي2: تؤدي التروس والوصلات والوصلات إلى إنشاء مناطق ميتة
- الاحتكاك: تؤدي الاختلافات في الاحتكاك الساكن والحركي إلى حدوث سلوك الانزلاق اللاصق
- الامتثال: التشوه المرن في الوصلات الميكانيكية
- أنماط التآكل: تآكل المكونات يؤدي إلى عدم انتظام أسطح التلامس
مصادر نظام التحكم
تضيف عناصر التحكم الإلكترونية والهوائية التباطؤ:
| نوع المكون | التباطؤ النموذجي | السبب الرئيسي | استراتيجية التخفيف من المخاطر |
|---|---|---|---|
| صمامات مؤازرة | 0.1-0.5% | احتكاك البكرة | تذبذب عالي التردد |
| الصمامات التناسبية3 | 0.5-2% | التباطؤ المغناطيسي | تعويض التغذية الراجعة |
| مستشعرات الموضع | 0.05-0.2% | الضوضاء الإلكترونية | تصفية الإشارات |
| مضخمات الصوت | 0.1-0.3% | إعدادات النطاق الميت | تعديل المعايرة |
الأصول الفيزيائية في الأنظمة الهوائية
تأثيرات احتكاك السدادة
تسبب الأختام الهوائية مصادر تباطؤ كبيرة:
- احتكاك الانفصال: تحتاج إلى قوة أكبر لبدء الحركة
- احتكاك الجري: قوة أقل أثناء الحركة المستمرة
- سلوك الانزلاق اللاصق4: حركة غير منتظمة عند السرعات المنخفضة
- الاعتماد على درجة الحرارة: يتغير الاحتكاك مع درجة حرارة التشغيل
ديناميكيات الضغط
تساهم تأثيرات ضغط النظام الهوائي في التباطؤ:
- قابلية الانضغاط: يؤدي ضغط الهواء إلى سلوك شبيه بالزنبرك
- قيود التدفق: تسبب قيود الصمامات والتجهيزات تأخيرات
- انخفاض الضغط: تؤدي خسائر الخطوط إلى قوى تعتمد على الموضع
- تأثيرات درجة الحرارة: يؤثر التمدد الحراري على صلابة النظام
في Bepto، قمنا بتصميم أسطواناتنا غير المزودة بقضبان باستخدام أختام ذات احتكاك منخفض للغاية وأنظمة توجيه مصنعة بدقة عالية تقلل من التباطؤ الميكانيكي بنسبة 60% مقارنة بالتصميمات القياسية، وهو أمر بالغ الأهمية لتطبيقات التحكم النسبي عالية الدقة. 🎯
التباطؤ المعتمد على الحمل
تأثيرات الحمل المتغير
تؤثر الأحمال الخارجية بشكل كبير على خصائص التباطؤ:
- الأحمال الجاذبية: تغيرات القوة حسب الموضع
- الأحمال القصوى: متطلبات القوة المعتمدة على التسارع
- أحمال العملية: قوى خارجية متغيرة أثناء التشغيل
- أحمال الاحتكاك: تغيرات قوة التلامس السطحي
تفاعلات الأحمال الديناميكية
تخلق الأحمال المتحركة أنماط تباطؤ معقدة:
- تأثيرات التسارع: قوى القصور الذاتي أثناء تغيرات السرعة
- اقتران الاهتزاز: تؤثر الاهتزازات الخارجية على تحديد المواقع
- تفاعلات الرنين: إثارة التردد الطبيعي
- تغيرات التخميد: خصائص التخميد المعتمدة على الحمولة
كيف يؤثر التباطؤ على أنواع مختلفة من أنظمة التحكم النسبي؟
تختلف تأثيرات التباطؤ بشكل كبير عبر تقنيات المشغلات المختلفة وبنى التحكم، مما يتطلب استراتيجيات تعويض مخصصة.
تواجه الأنظمة النسبية ذات الحلقة المفتوحة أخطاء تباطؤ تتراوح بين 5 و 15% دون إمكانية التصحيح، في حين أن الأنظمة ذات الحلقة المغلقة يمكنها تقليل التباطؤ إلى 0.5-2% من خلال تعويض التغذية الراجعة، مع تحقيق أنظمة المؤازرة المتقدمة دقة أقل من 0.1% باستخدام مشفرات عالية الدقة وخوارزميات تحكم متطورة.
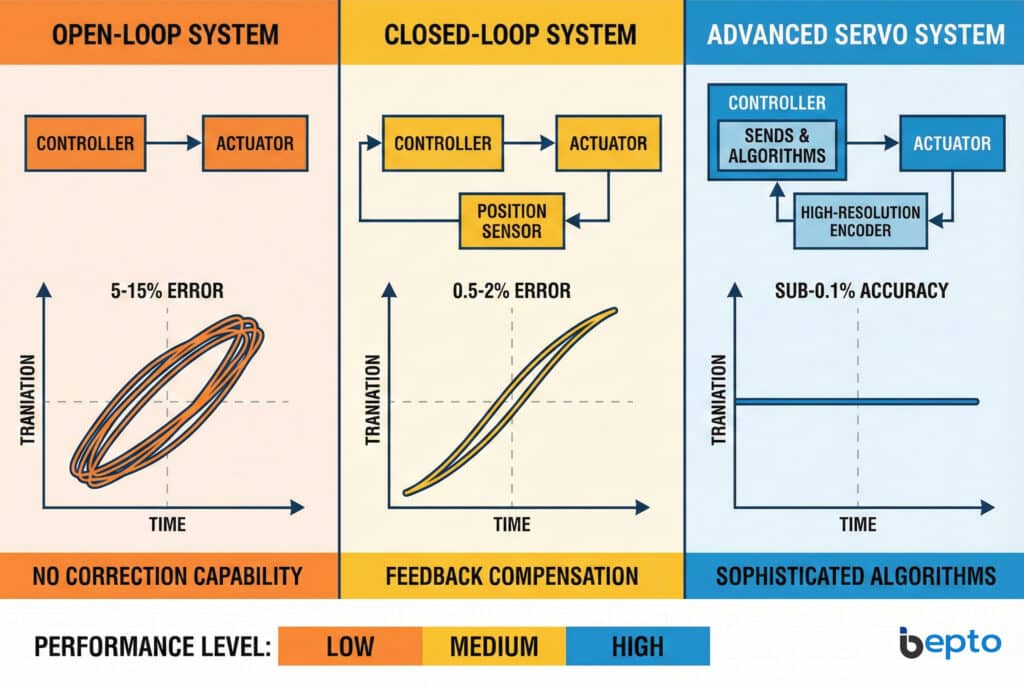
أنظمة التحكم ذات الحلقة المفتوحة
القيود المتأصلة
لا يمكن للأنظمة ذات الحلقة المفتوحة تعويض تأثيرات التباطؤ:
- لا يوجد تصحيح للتعليقات: تتراكم الأخطاء دون اكتشافها
- أنماط يمكن التنبؤ بها: التباطؤ يسبب أخطاء متكررة في تحديد المواقع
- حساسية درجة الحرارة: يختلف الأداء باختلاف ظروف التشغيل
- تبعية التحميل: الأحمال المختلفة تخلق أنماط تباطؤ مختلفة
خصائص الأداء النموذجية
يختلف أداء التباطؤ في النظام المفتوح الحلقة باختلاف التطبيق:
| نوع التطبيق | نطاق التباطؤ | الاستخدامات المقبولة | قيود الأداء |
|---|---|---|---|
| التموضع البسيط | 5-15% | المهام غير الحرجة | ضعف التكرار |
| التحكم في السرعة | 3-8% | تنظيم السرعة التقريبي | أداء متغير |
| التحكم في القوة | 10-25% | تطبيقات القوة الأساسية | نتائج غير متسقة |
| أنظمة متعددة المحاور | 8-20% | أتمتة بسيطة | الأخطاء التراكمية |
أنظمة التحكم ذات الدائرة المغلقة
مزايا تعويضات التغذية الراجعة
يمكن للأنظمة ذات الحلقة المغلقة أن تعوض بشكل فعال عن التباطؤ:
- اكتشاف الأخطاء: مراقبة مستمرة للموقع
- التصحيح في الوقت الحقيقي: الاستجابة الفورية لأخطاء تحديد المواقع
- التحكم التكيفي: خوارزميات التعلم تحسن الأداء
- رفض الإزعاج تعويض القوة الخارجية
فعالية خوارزمية التحكم
تتعامل استراتيجيات التحكم المختلفة مع التباطؤ بنجاح متفاوت:
- التحكم PID5: التعويض الأساسي، 2-5% التباطؤ المتبقي
- تحكم معزز: التعويض التنبئي، 1-3% المتبقي
- التحكم التكيفي: تعويض التعلم، 0.5-2% متبقي
- التحكم القائم على النموذج: التعويض النظري، 0.1-1% المتبقي
أنظمة التحكم المؤازر
تقنيات التعويض المتقدمة
تستخدم أنظمة المؤازرة عالية الأداء تعويضًا متطورًا للتباطؤ:
- رسم خرائط التباطؤ: توصيف النظام وجداول التعويض
- تقنيات التحميل المسبق: تحيز ميكانيكي للقضاء على المناطق الميتة
- إشارات التذبذب: إثارة عالية التردد للتغلب على الاحتكاك
- الخوارزميات التنبؤية: تنبؤ التباطؤ القائم على النموذج
قام مايكل، مهندس روبوتات في مصنع للتصنيع الدقيق في ولاية كارولينا الشمالية، بتنفيذ تحديثات التحكم المؤازر التي أوصينا بها على خط التجميع الخاص به. تحسنت دقة تحديد المواقع من ±2.5 مم إلى ±0.3 مم، مما أدى إلى تقليل عيوب المنتج بنسبة 75% وتوفير $50,000 شهريًا في تكاليف إعادة التصنيع. 🤖
تحديات النظام متعدد المحاور
الآثار التراكمية
مشاكل التباطؤ المركب للمحركات المتعددة:
- تراكم الأخطاء: أخطاء المحاور الفردية مجتمعة
- تأثيرات الاقتران: تفاعلات المحور تخلق أنماطًا معقدة
- مشاكل التزامن: تسبب أنماط التباطؤ المختلفة مشاكل في التنسيق
- تعقيد المعايرة: تتطلب الأنظمة المتعددة ضبطًا فرديًا
استراتيجيات التنسيق
تستخدم الأنظمة المتطورة متعددة المحاور تقنيات متخصصة:
- التحكم الرئيسي-التابع: محور واحد يقود، والآخرون يتبعون
- تعويض التزاوج المتبادل: تصحيح تفاعل المحور
- تحديد المواقع المتزامن: ملامح الحركة المنسقة
- التحسين الشامل: تحسين الأداء على مستوى النظام
ما هي تقنيات القياس الأفضل لتحديد وتقدير تأثيرات التباطؤ؟
يتيح القياس الدقيق للتباطؤ والتوصيف تطوير استراتيجية تعويض فعالة وتحسين النظام.
يتطلب قياس التباطؤ إجراء اختبارات تحديد المواقع ثنائية الاتجاه باستخدام أجهزة تشفير عالية الدقة، وتسجيل العلاقات بين المواقع والأوامر خلال دورات كاملة، وتحليل عرض الحلقة وأنماط عدم التماثل، وتوثيق اعتمادات درجة الحرارة والحمل لإنشاء خرائط تعويض شاملة من أجل تحقيق أداء تحكم أمثل.
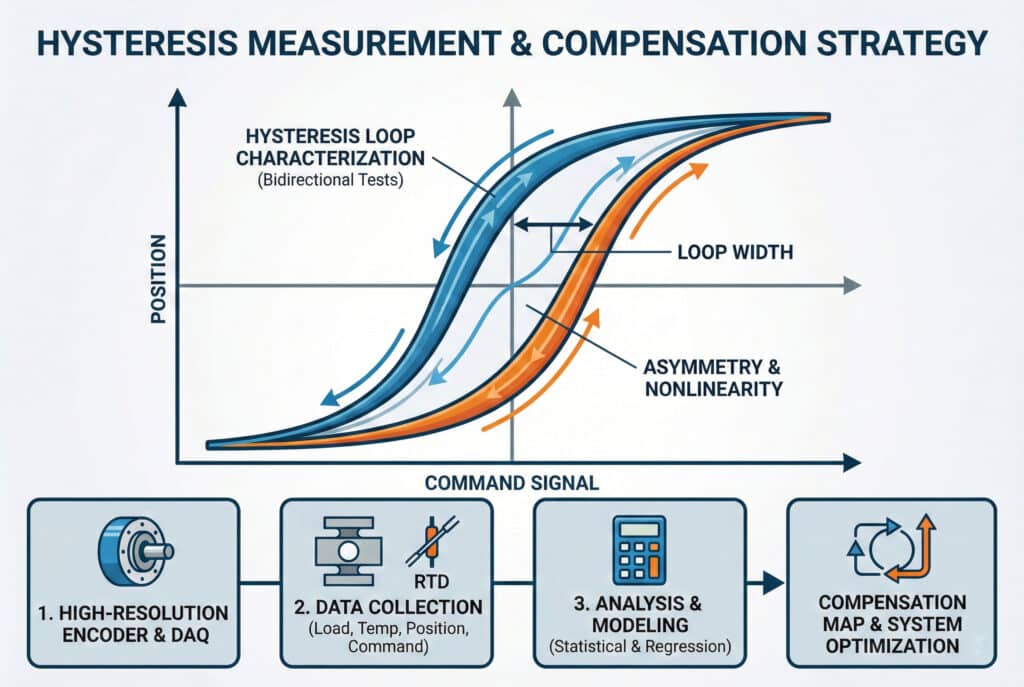
بروتوكولات القياس القياسية
اختبارات تحديد المواقع ثنائية الاتجاه
يتطلب التوصيف الشامل للتباطؤ اختبارات منهجية:
- دورات السكتة الكاملة: تسلسلات التمدد والانكماش الكاملة
- سرعات متعددة: مختلف ملامح السرعة لتحديد التبعيات المعدلية
- اختلافات الأحمال: أحمال خارجية مختلفة لرسم خريطة تأثيرات الحمل
- نطاقات درجات الحرارة: تقييم تأثير درجة حرارة التشغيل
متطلبات جمع البيانات
يتطلب القياس الدقيق للتباطؤ أجهزة عالية الجودة:
| معلمة القياس | الدقة المطلوبة | المعدات النموذجية | هدف الدقة |
|---|---|---|---|
| ردود الفعل على الموقف | 0.01% من السكتة الدماغية | مشفر خطي | ±0.005% |
| إشارة الأمر | 12 بت كحد أدنى | نظام DAQ | ± 0.1% |
| قياس الحمولة | 1% من القوة المقدرة | خلية التحميل | ± 0.5% |
| درجة الحرارة | ±1°C | مستشعر RTD | ±0.5°C |
تقنيات التحليل
توصيف حلقة التباطؤ
يكشف التحليل الرياضي عن خصائص التباطؤ:
- عرض الحلقة: أقصى فرق في الموضع عند نفس الأمر
- عدم التماثل: التحيز الاتجاهي في أخطاء تحديد المواقع
- عدم الخطية: الانحراف عن الاستجابة الخطية المثالية
- التكرار: الاتساق عبر دورات متعددة
طرق التحليل الإحصائي
تقنيات التحليل المتقدمة تقيس تأثيرات التباطؤ:
- الانحراف المعياري: قياس تكرار تحديد المواقع
- تحليل الارتباط: قوة العلاقة بين المدخلات والمخرجات
- تحليل التردد: خصائص الاستجابة الديناميكية
- تحليل الانحدار: تطوير النماذج الرياضية
أنظمة المراقبة في الوقت الحقيقي
تتبع التباطؤ المستمر
تستفيد أنظمة الإنتاج من المراقبة المستمرة للتباطؤ:
- أجهزة استشعار مدمجة: أنظمة مدمجة لتغذية الارتجاع الموضعية
- تسجيل البيانات: تسجيل الأداء المستمر
- تحليل الاتجاهات: تتبع تدهور الأداء على المدى الطويل
- الصيانة التنبؤية: الإنذار المبكر بتآكل المكونات
تتضمن أنظمة التشخيص Bepto الخاصة بنا مراقبة التباطؤ في الوقت الفعلي التي تنبه المشغلين عندما تتجاوز أخطاء تحديد المواقع عتبات 0.5%، مما يتيح إجراء صيانة استباقية قبل أن تتدهور الدقة إلى مستويات غير مقبولة. 📊
تقييم الأثر البيئي
تأثيرات درجة الحرارة
تؤثر درجة الحرارة بشكل كبير على خصائص التباطؤ:
- التمدد الحراري: التغييرات في الأبعاد الميكانيكية
- تغيرات اللزوجة: تغيرات خصائص السوائل
- خواص المواد: اعتماد معامل المرونة على درجة الحرارة
- أداء الختم: تغيرات معامل الاحتكاك
تحليل الاعتماد على الحمل
تخلق الأحمال الخارجية أنماط تباطؤ معقدة:
- أحمال ثابتة: تأثيرات القوة الثابتة على تحديد المواقع
- الأحمال الديناميكية: تأثير القوة المتغيرة أثناء الحركة
- تأثيرات القصور الذاتي: أخطاء تحديد المواقع التي تعتمد على التسارع
- تغيرات الاحتكاك: تأثير حالة السطح على الأداء
ما هي أكثر الطرق فعالية لتقليل التباطؤ في نظامك؟
يمكن أن يؤدي تنفيذ استراتيجيات شاملة لتقليل التباطؤ إلى تحقيق دقة تحديد المواقع أقل من 1% في تطبيقات التحكم النسبي الصعبة.
يجمع التقليل الفعال للتباطؤ بين التحسينات الميكانيكية، بما في ذلك المكونات منخفضة الاحتكاك والقضاء على التباطؤ، وتحسينات نظام التحكم مع تعويض التغذية الأمامية والخوارزميات التكيفية، بالإضافة إلى عناصر التحكم البيئية لثبات درجة الحرارة والحمل، مما يقلل عادةً التباطؤ من 5-15% إلى أقل من 1% من النطاق الكامل.
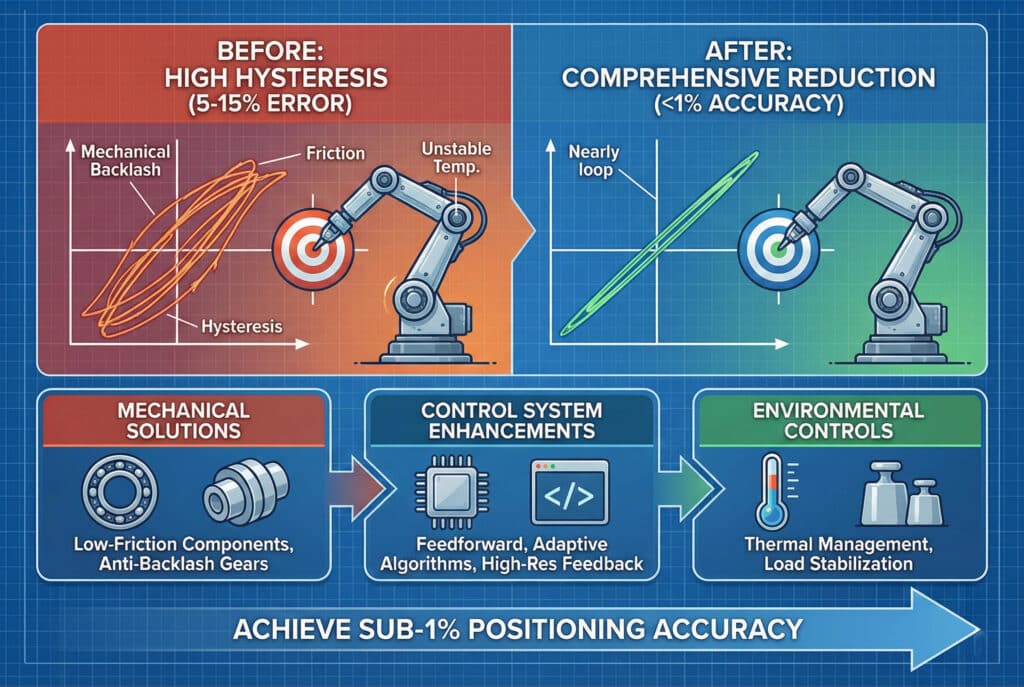
الحلول الميكانيكية
اختيار المكونات وتصميمها
اختر مكونات مصممة خصيصًا لتقليل التباطؤ:
- محامل دقيقة: موجهات خطية عالية الجودة مع الحد الأدنى من الحركة
- موانع تسرب منخفضة الاحتكاك: مواد وتصميمات متطورة للأختام
- الوصلات الصلبة: القضاء على مصادر رد الفعل الميكانيكي
- الأنظمة المثبتة مسبقًا: تحيز ميكانيكي للقضاء على المناطق الميتة
تحسينات بنية النظام
تصميم أنظمة ميكانيكية لتقليل مصادر التباطؤ إلى الحد الأدنى:
| ميزة التصميم | تقليل التباطؤ | تكلفة التنفيذ | تأثير الصيانة |
|---|---|---|---|
| محرك مباشر | 80-90% | عالية | منخفضة |
| أدلة محملة مسبقًا | 60-70% | متوسط | متوسط |
| وصلات دقيقة | 40-50% | منخفضة | منخفضة |
| تروس مضادة للارتداد | 70-80% | متوسط | عالية |
تحسينات نظام التحكم
تقنيات تعويض البرمجيات
يمكن لخوارزميات التحكم المتقدمة أن تقلل بشكل كبير من تأثيرات التباطؤ:
- رسم خرائط التباطؤ: جداول البحث لتصحيح الموضع
- تحكم معزز: التعويض التنبئي بناءً على توجيهات القيادة
- خوارزميات التكيف: تعويض التباطؤ الذاتي التعلم
- التحكم القائم على النموذج: تنبؤ التباطؤ القائم على الفيزياء
تحسينات نظام التغذية الراجعة
تتيح أنظمة التغذية الراجعة المحسّنة تعويضاً أفضل للتباطؤ:
- مشفرات عالية الدقة: تحسين دقة قياس الموقع
- أجهزة استشعار متعددة للتغذية الراجعة: قياس الموضع الزائد
- تغذية راجعة للسرعة: خوارزميات التعويض على أساس السعر
- رد فعل القوة: تعويض التباطؤ المعتمد على الحمل
استراتيجيات التحكم البيئي
إدارة درجة الحرارة
تقلل درجات حرارة التشغيل المستقرة من تقلبات التباطؤ:
- العزل الحراري: حماية المشغلات من التقلبات في درجات الحرارة
- التبريد النشط: الحفاظ على درجات حرارة تشغيل ثابتة
- تعويض درجة الحرارة: تصحيح البرامج للتأثيرات الحرارية
- التكييف الحراري المسبق: السماح للأنظمة بالوصول إلى التوازن الحراري
تثبيت الحمولة
تقلل ظروف التحميل المتسقة من تباينات التباطؤ:
- عزل الحمل: فصل الاضطرابات الخارجية
- الموازنة: تقليل تأثيرات الحمل الجاذبي
- تخميد الاهتزازات: تقليل التغيرات الديناميكية في الحمل
- تحسين العمليات: تقليل القوى الخارجية المتغيرة
سارة، مهندسة عمليات في مصنع لتعبئة الأدوية في كولورادو، طبقت برنامجنا الشامل للحد من التباطؤ. تحسنت دقة عد الأقراص لديها من 98.5% إلى 99.8%، مما يلبي متطلبات إدارة الغذاء والدواء الأمريكية (FDA) مع تقليل النفايات بمقدار $25,000 شهريًا. 💊
تقنيات التعويض المتقدمة
تطبيق إشارة التذبذب
يمكن للإثارة عالية التردد التغلب على التباطؤ الناتج عن الاحتكاك:
- اختيار التردد: اختر ترددات أعلى من عرض النطاق الترددي للنظام
- تحسين السعة: توازن بين الفعالية واستقرار النظام
- تصميم شكل الموجة: إشارات جيبية أو مثلثة أو عشوائية
- طرق التنفيذ: توليد الأجهزة أو البرامج
طرق التحكم التنبؤي
توفر النهج القائمة على النماذج تعويضًا فائقًا عن التباطؤ:
- تحديد النظام: تطوير النماذج الرياضية
- تصفية كالمان: تقدير الحالة المثلى
- التحكم التنبئي النموذجي: تحسين الحالة المستقبلية
- النمذجة التكيفية: تحديثات معلمات النموذج في الوقت الفعلي
الصيانة والمعايرة
إجراءات المعايرة المنتظمة
تحافظ المعايرة المنهجية على أداء منخفض للتأخر:
- رسم خرائط التباطؤ الدوري: توثيق التغييرات في الأداء
- فحص المكونات: تحديد التدهور المرتبط بالتآكل
- صيانة التشحيم: الحفاظ على مستويات الاحتكاك المثلى
- التحقق من المحاذاة: ضمان الدقة الميكانيكية
استراتيجيات الصيانة التنبؤية
الصيانة الاستباقية تمنع تدهور التباطؤ:
- اتجاهات الأداء: تتبع تغيرات التباطؤ بمرور الوقت
- تتبع عمر المكونات: استبدال المكونات قبل تعطلها
- مراقبة الحالة: تقييم صحة النظام المستمر
- الاستبدال الوقائي: جدولة الصيانة بناءً على الاستخدام
في Bepto، تحقق حزمتنا لتقليل التباطؤ عادةً تحسناً بنسبة 70-85% في دقة تحديد المواقع، حيث أبلغ العديد من العملاء عن مستويات تباطؤ أقل من 0.5% في أكثر تطبيقاتهم تطلباً — وهو أداء يترجم مباشرة إلى جودة أعلى للمنتج وتقليل النفايات. 🎯
الخاتمة
إن فهم ومراقبة التباطؤ أمر ضروري لتحقيق تحكم دقيق في المشغل النسبي، الأمر الذي يتطلب قياسًا منهجيًا وتعويضًا مستهدفًا وصيانة مستمرة لتحقيق الأداء الأمثل.
أسئلة وأجوبة حول التباطؤ في التحكم النسبي بالمحرك
س: ما الذي يعتبر تباطؤًا مقبولًا في أنظمة المشغلات النسبية؟
يعتمد التباطؤ المقبول على متطلبات التطبيق: تتحمل الأتمتة العامة 2-5%، وتحتاج التجميعات الدقيقة إلى أقل من 1%، وتتطلب التطبيقات فائقة الدقة مستويات تباطؤ أقل من 0.5%. عادةً ما تحقق أنظمة Bepto الخاصة بنا تباطؤًا يتراوح بين 0.3 و0.8% مع التنفيذ السليم.
س: هل يمكن للتعويض البرمجي أن يقضي تمامًا على التباطؤ الميكانيكي؟
يمكن أن تقلل تعويضات البرامج من التباطؤ بنسبة 60-80%، ولكنها لا يمكن أن تقضي تمامًا على المصادر الميكانيكية مثل التباطؤ والاحتكاك. ويحقق الجمع بين التحسينات الميكانيكية وتعويضات البرامج أفضل النتائج، والتي عادةً ما تكون أقل من 1% من إجمالي تباطؤ النظام.
س: كم مرة يجب أن أعيد معايرة نظام التحكم النسبي الخاص بي من أجل التباطؤ؟
تعتمد وتيرة المعايرة على كثافة الاستخدام ومتطلبات الدقة: تحتاج الأنظمة عالية الدقة إلى معايرة شهرية، بينما تتطلب التطبيقات العامة فحوصات ربع سنوية، ويمكن للأنظمة منخفضة الدقة استخدام جداول معايرة سنوية مع مراقبة مستمرة للأداء.
س: ما الفرق بين التباطؤ والارتداد في أنظمة المشغلات؟
الارتداد هو اللعب الميكانيكي في الوصلات والتروس، بينما يشمل التباطؤ جميع التأثيرات التي تعتمد على الموضع، بما في ذلك الاحتكاك والتأثيرات المغناطيسية والمناطق الميتة في نظام التحكم. الارتداد هو أحد مكونات التباطؤ الكلي للنظام.
س: كيف أعرف ما إذا كان التباطؤ هو سبب مشاكل تحديد المواقع التي أواجهها؟
يؤدي التباطؤ إلى ظهور أنماط مميزة: أخطاء ثابتة في تحديد المواقع تعتمد على اتجاه الاقتراب، ودقة مختلفة عند التحرك لأعلى مقابل التحرك لأسفل، وأنماط أخطاء متكررة. تكشف اختبارات تحديد المواقع ثنائية الاتجاه عن حلقات تباطؤ تؤكد التشخيص.
-
تعرف على المبادئ الفيزيائية للتباطؤ وتأثيره على الدقة في مختلف التخصصات الهندسية. ↩
-
فهم الأسباب والحلول الهندسية للقضاء على رد الفعل العكسي في الوصلات الميكانيكية. ↩
-
استكشف الآليات الداخلية ومبادئ التشغيل لصمامات التحكم الهوائية النسبية. ↩
-
اكتشف الآليات الكامنة وراء ظاهرة الانزلاق المتقطع وكيف تؤثر على حركة المشغلات منخفضة السرعة. ↩
-
اكتساب فهم أعمق لنظرية التحكم PID وتطبيقاتها في الأتمتة الصناعية. ↩
