

Hiszterézis1 minden arányos működtető rendszerben rejtőző, láthatatlan precíziós gyilkos, amely csendben akár 15%-vel is rontja a pozicionálási pontosságot, miközben a mérnökök minden mást hibáztatnak, csak a valódi bűnöst nem. Ez a jelenség miatt a működtetők “megjegyzik” előző pozíciójukat, ami kiszámíthatatlan holtzónákat hoz létre, és a sima vezérlést frusztráló inkonzisztenciává változtatja. 😠
A proporcionális működtető vezérlésben fellépő hiszterézis mechanikai holtjáték, tömítés súrlódás, mágneses hatások és vezérlőszelep holtzónák miatt 2-15% teljes löketű pozicionálási hibákat okoz, amelyeket szoftveres algoritmusokkal, mechanikus előterheléssel, nagyobb felbontású visszacsatolással és megfelelő alkatrészválasztással kell kompenzálni a 1% alatti pozicionálási pontosság elérése érdekében.
Két hónappal ezelőtt Jenniferrel dolgoztam együtt, aki egy seattle-i repülőgépgyártó üzemben dolgozik vezérlőmérnökként. Az ő precíziós szerelőrobotjai folyamatosan 3 mm-rel tévesztették el a célpontokat – nem véletlenszerűen, hanem egy előre jelezhető mintázat szerint, ami hiszterézisre utalt. Miután bevezettük a Bepto hiszterézisellenes megoldásait, a pozicionálási hibák 0,5 mm alá csökkentek. ✈️
Tartalomjegyzék
- Mi is pontosan a hiszterézis, és miért jelentkezik az arányos működtető mechanizmusokban?
- Hogyan hat a hiszterézis a különböző típusú arányos szabályozó rendszerekre?
- Mely mérési technikák alkalmasak leginkább a hiszterézis hatások azonosítására és számszerűsítésére?
- Melyek a leghatékonyabb módszerek a hiszterézis minimalizálására a rendszerében?
Mi is pontosan a hiszterézis, és miért jelentkezik az arányos működtető mechanizmusokban?
A hiszterézis mechanizmusok megértése elengedhetetlen a pneumatikus és hidraulikus működtető rendszerekben a pontos arányos vezérlés eléréséhez.
Hiszterézis akkor lép fel, amikor a működtető kimeneti pozíciója mind az aktuális bemeneti parancstól, mind a korábbi pozíció történetétől függ, ami a mechanikai holtjáték, a súrlódási erők, a mágneses hatások és a vezérlő szelep holtterei miatt különböző válaszútvonalakat hoz létre a növekvő és csökkenő parancsok esetében, amelyek a vezérlő hurokban halmozódnak fel.
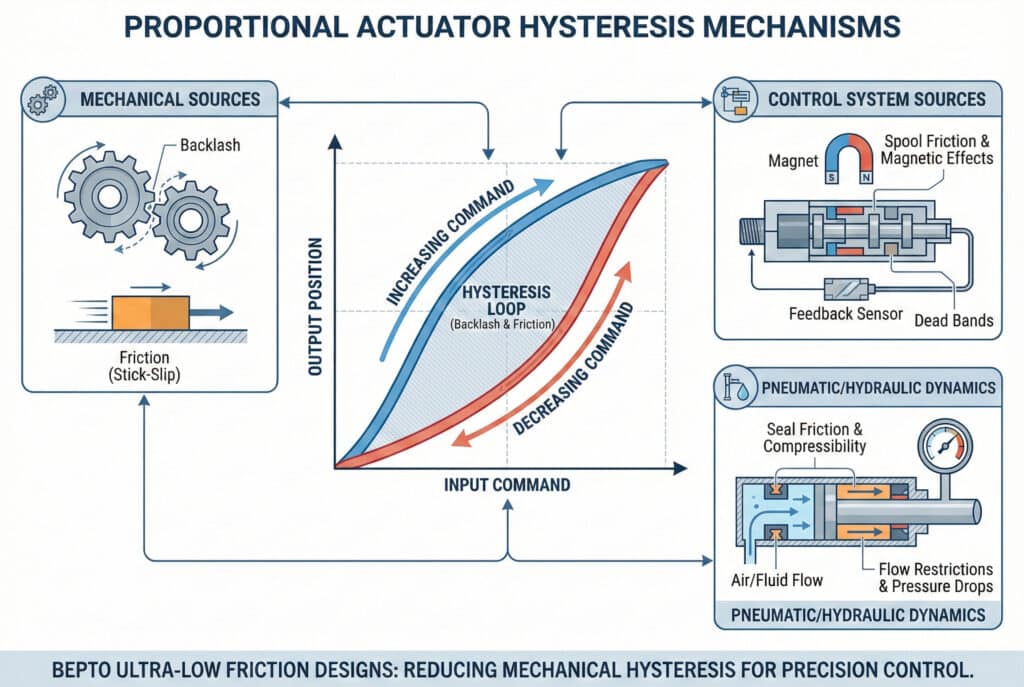
Alapvető hiszterézis mechanizmusok
Mechanikai források
A fizikai alkatrészek jelentősen hozzájárulnak a rendszer hiszteréziséhez:
- Backlash2: A fogaskerék-hajtások, tengelykapcsolók és csatlakozások holtzónákat hoznak létre
- Súrlódás: A statikus és kinetikus súrlódás különbségei tapadás-csúszás viselkedést okoznak.
- Megfelelés: Elasztikus alakváltozás mechanikus kapcsolódásokban
- Kopásminták: A komponensek kopása szabálytalan érintkezési felületeket eredményez
Vezérlőrendszer források
Az elektronikus és pneumatikus vezérlőelemek hiszterézist adnak hozzá:
| Komponens típusa | Tipikus hiszterézis | Elsődleges ok | Enyhítési stratégia |
|---|---|---|---|
| Szervoszelepek | 0.1-0.5% | Orsó súrlódás | Nagyfrekvenciás dither |
| Proporcionális szelepek3 | 0.5-2% | Mágneses hiszterézis | Visszacsatolás-kompenzáció |
| Pozícióérzékelők | 0.05-0.2% | Elektronikus zaj | Jel szűrés |
| Erősítők | 0.1-0.3% | Halott sáv beállítások | Kalibrációs beállítás |
A pneumatikus rendszerek fizikai eredete
Tömítés súrlódási hatások
A pneumatikus tömítések jelentős hiszterézisforrásokat hoznak létre:
- Töréssúrlódás: A mozgás megkezdéséhez nagyobb erő szükséges
- Futási súrlódás: Kisebb erő folyamatos mozgás közben
- stick-slip viselkedés4: Alacsony sebességnél szabálytalan mozgás
- Hőmérsékletfüggés: A súrlódás az üzemi hőmérséklettel változik
Nyomás dinamika
A pneumatikus rendszer nyomáshatásai hozzájárulnak a hiszterézishez:
- Összenyomhatóság: A levegő összenyomódása rugószerű viselkedést eredményez
- Áramlási korlátozások: A szelepek és szerelvények korlátozásai késleltetéseket okoznak
- Nyomásesés: A vezetékveszteségek pozíciófüggő erőket hoznak létre
- Hőmérsékleti hatások: A hőtágulás befolyásolja a rendszer merevségét
A Bepto-nál a rúd nélküli hengerünket ultraalacsony súrlódású tömítésekkel és precíziósan megmunkált vezető rendszerekkel terveztük meg, amelyek a mechanikai hiszterézist 60%-vel csökkentik a standard kivitelekhez képest – ez kritikus fontosságú a nagy pontosságú arányos vezérlési alkalmazásoknál. 🎯
Terhelésfüggő hiszterézis
Változó terhelés hatások
A külső terhelések jelentősen befolyásolják a hiszterézis jellemzőit:
- Gravitációs terhelések: Pozíciófüggő erőváltozások
- Tehetetlenségi terhelések: Gyorsulásfüggő erőigény
- Folyamat terhelések: Változó külső erők működés közben
- Súrlódási terhelések: Felületi érintkezési erőváltozások
Dinamikus terhelés-kölcsönhatások
A mozgó terhelések komplex hiszterézis mintákat hoznak létre:
- Gyorsulási hatások: Inerciális erők sebességváltozáskor
- Rezgéscsatolás: A külső rezgések befolyásolják a pozicionálást
- Rezonancia kölcsönhatások: Természetes frekvencia gerjesztés
- Csillapítási variációk: Terhelésfüggő csillapítási jellemzők
Hogyan hat a hiszterézis a különböző típusú arányos szabályozó rendszerekre?
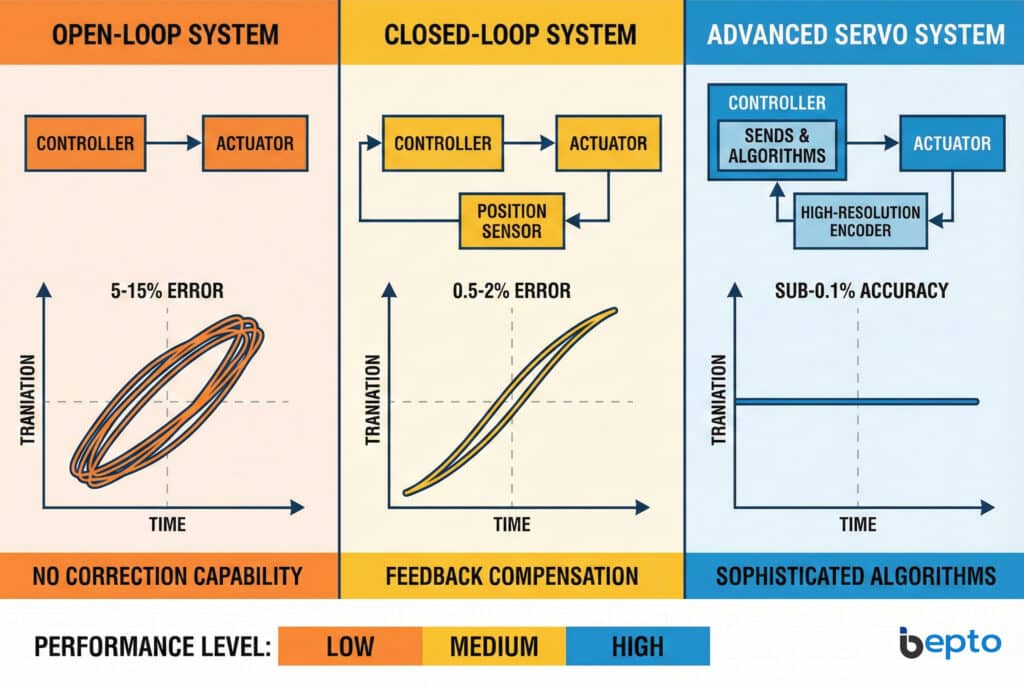
A hiszterézis hatások jelentősen eltérnek a különböző működtető technológiák és vezérlő architektúrák között, ezért testreszabott kompenzációs stratégiákra van szükség.
A nyitott hurkú arányos rendszerek 5-15% hiszterézis hibákat tapasztalnak, korrekciós képesség nélkül, míg a zárt hurkú rendszerek visszacsatolásos kompenzációval 0,5-2%-re csökkenthetik a hiszterézist, a fejlett szervo rendszerek pedig nagy felbontású kódolók és kifinomult vezérlő algoritmusok segítségével 0,1% alatti pontosságot érnek el.
Nyitott hurkú vezérlőrendszerek
Belső korlátok
A nyitott hurkú rendszerek nem képesek kompenzálni a hiszterézis hatásokat:
- Nincs visszajelzés-korrekció: A hibák felhalmozódnak, anélkül, hogy észrevennék őket
- Előre jelezhető minták: A hiszterézis ismétlődő pozicionálási hibákat okoz
- Hőmérsékletérzékenység: A teljesítmény az üzemi körülményektől függően változhat.
- Terhelésfüggőség: Különböző terhelések különböző hiszterézis mintákat hoznak létre
Tipikus teljesítményjellemzők
A nyitott hurkú rendszer hiszterézis teljesítménye alkalmazástól függően változik:
| Alkalmazás típusa | Hiszterézis tartomány | Elfogadható felhasználások | Teljesítménykorlátozások |
|---|---|---|---|
| Egyszerű pozicionálás | 5-15% | Nem kritikus feladatok | Gyenge ismételhetőség |
| Sebességszabályozás | 3-8% | Durva sebességszabályozás | Változó teljesítmény |
| Erőszabályozás | 10-25% | Alapvető erőalkalmazások | Inkonzisztens kimenet |
| Többtengelyes rendszerek | 8-20% | Egyszerű automatizálás | Halmozott hibák |
Zárt hurkú vezérlőrendszerek
Visszacsatolási kompenzációs juttatások
A zárt hurkú rendszerek aktívan kompenzálhatják a hiszterézist:
- Hibaérzékelés: Folyamatos helyzetfigyelés
- Valós idejű korrekció: Azonnali reagálás a pozicionálási hibákra
- Adaptív vezérlés: A tanulási algoritmusok javítják a teljesítményt
- Zavarás elutasítása: Külső erő kompenzáció
A vezérlő algoritmus hatékonysága
A különböző vezérlési stratégiák eltérő sikerrel kezelik a hiszterézist:
- PID szabályozás5: Alapkompenzáció, 2-5% maradék hiszterézis
- Előremenő szabályozás: Prediktív kompenzáció, 1-3% maradék
- Adaptív vezérlés: Tanulási kompenzáció, 0,5-2% maradék
- Modellalapú vezérlés: Elméleti kompenzáció, 0,1-1% maradék
Szervorendszerek
Fejlett kompenzációs technikák
A nagy teljesítményű szervorendszerek kifinomult hiszterézis-kompenzációt alkalmaznak:
- Hiszterézis-térkép: Rendszerjellemzők és kompenzációs táblázatok
- Előterhelési technikák: Mechanikus előfeszítés a holtzónák kiküszöbölésére
- Dither jelek: Magas frekvenciájú gerjesztés a súrlódás leküzdésére
- Prediktív algoritmusok: Modellalapú hiszterézis-előrejelzés
Michael, egy észak-karolinai precíziós gyártóüzem robotikai mérnöke, végrehajtotta az általunk ajánlott szervo vezérlés frissítéseket a gyártósorán. Pozicionálási pontossága ±2,5 mm-ről ±0,3 mm-re javult, ami 75%-vel csökkentette a termékhibák számát és havi $50 000 dollárt takarított meg az átdolgozási költségekben. 🤖
Többtengelyes rendszer kihívásai
Kumulatív hatások
Több működtető szerkezet hiszterézis problémákat okoz:
- Hiba felhalmozódás: Az egyes tengelyek hibái összeadódnak
- Kapcsolódási hatások: A tengelyek kölcsönhatásai komplex mintákat hoznak létre
- Szinkronizálási problémák: A különböző hiszterézis minták koordinációs problémákat okoznak
- A kalibrálás bonyolultsága: Több rendszer egyedi beállítást igényel
Koordinációs stratégiák
A fejlett többtengelyes rendszerek speciális technikákat alkalmaznak:
- Mester-szolga vezérlés: Az egyik tengely vezet, a többi követi
- Keresztkapcsolási kompenzáció: Tengelyek közötti kölcsönhatás korrekciója
- Szinkronizált pozicionálás: Koordinált mozgásprofilok
- Globális optimalizálás: Rendszer szintű teljesítményoptimalizálás
Mely mérési technikák alkalmasak leginkább a hiszterézis hatások azonosítására és számszerűsítésére?
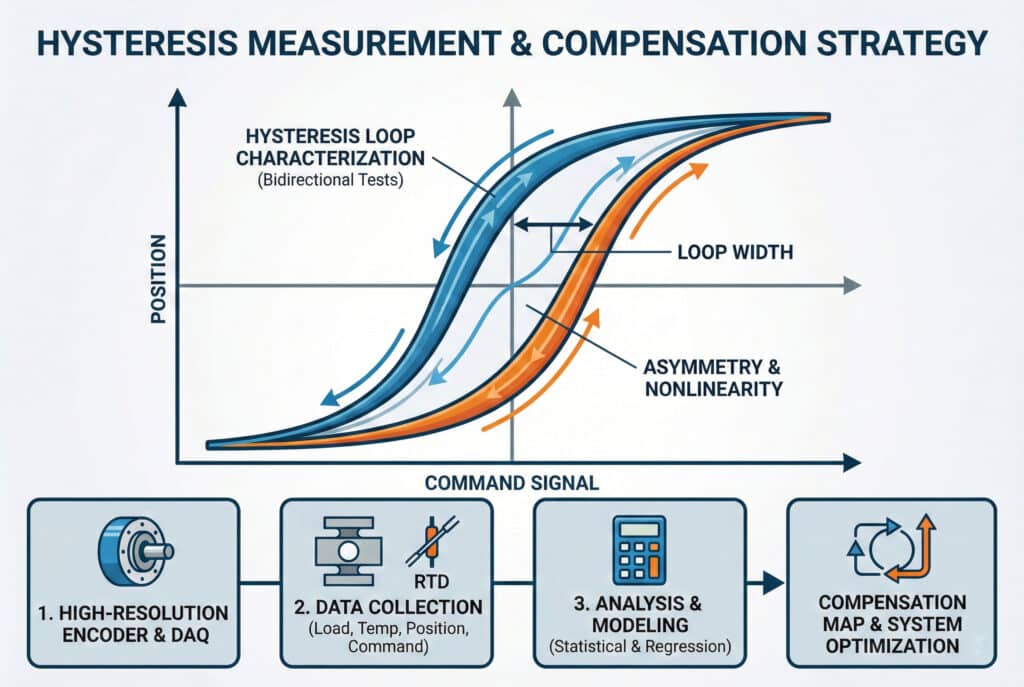
A pontos hiszterézis mérés és jellemzés lehetővé teszi a hatékony kompenzációs stratégia kidolgozását és a rendszer optimalizálását.
A hiszterézis méréséhez kétirányú pozicionálási tesztekre van szükség nagy felbontású enkóderekkel, a pozíció és a parancs közötti kapcsolatok teljes ciklusokon keresztüli rögzítésével, a hurok szélességének és az aszimmetria mintáinak elemzésével, valamint a hőmérséklet és a terhelés függőségének dokumentálásával, hogy átfogó kompenzációs térképeket lehessen készíteni az optimális vezérlési teljesítmény érdekében.
Szabványos mérési protokollok
Kétirányú pozicionálási tesztek
A hiszterézis átfogó jellemzése szisztematikus tesztelést igényel:
- Teljes löketciklusok: Teljes kiterjesztési és visszahúzási sorozatok
- Többféle sebesség: Különböző sebességprofilok a sebességfüggőségek azonosításához
- Terhelésváltozások: Különböző külső terhelések a terhelés hatásának feltérképezéséhez
- Hőmérsékleti tartományok: Üzemi hőmérséklet hatásának értékelése
Adatgyűjtési követelmények
A pontos hiszterézis méréshez kiváló minőségű műszerekre van szükség:
| Mérési paraméter | Szükséges felbontás | Tipikus berendezések | Pontosság Cél |
|---|---|---|---|
| Pozíció visszajelzés | 0,01% stroke | Lineáris kódoló | ±0,0051 TP3T |
| Parancsjel | 12 bites minimum | DAQ rendszer | ±0,1% |
| Terhelésmérés | 1% névleges erő | Terhelésmérő cella | ±0,5% |
| Hőmérséklet | ±1°C | RTD érzékelő | ±0.5°C |
Elemzési technikák
Hiszterézis hurok jellemzése
A matematikai elemzés hiszterézis jellemzőket tár fel:
- Hurok szélessége: Maximális pozícióeltérés azonos parancs esetén
- Aszimmetria: Irányított torzítás a pozicionálási hibákban
- Nemlinearitás: Eltérés az ideális lineáris választól
- Ismételhetőség: Több cikluson átívelő konzisztencia
Statisztikai elemzési módszerek
A fejlett elemzési technikák számszerűsítik a hiszterézis hatásokat:
- Szórás: Pozicionálás ismételhetőségének mérése
- Korrelációelemzés: Bemenet-kimenet kapcsolat erőssége
- Frekvenciaelemzés: Dinamikus válaszjellemzők
- Regresszióelemzés: Matematikai modell kidolgozása
Valós idejű felügyeleti rendszerek
Folyamatos hiszterézis-követés
A gyártási rendszerek előnyösnek tartják a folyamatos hiszterézis-figyelést:
- Beágyazott érzékelők: Beépített pozícióvisszacsatoló rendszerek
- Adatnaplózás: Folyamatos teljesítmény rögzítés
- Trendelemzés: Hosszú távú teljesítményromlás nyomon követése
- Prediktív karbantartás: Alkatrészek kopásának korai figyelmeztetése
Bepto diagnosztikai rendszereink valós idejű hiszterézis-figyelést tartalmaznak, amely figyelmezteti a kezelőket, ha a pozicionálási hibák meghaladják a 0,5% küszöbértéket, lehetővé téve a proaktív karbantartást, mielőtt a pontosság elfogadhatatlan szintre romlana. 📊
Környezeti hatástanulmány
Hőmérsékleti hatások
A hőmérséklet jelentősen befolyásolja a hiszterézis jellemzőit:
- Hőtágulás: Mechanikai méretváltozások
- Viszkozitásváltozások: A folyadék tulajdonságainak változásai
- Anyagi tulajdonságok: Elasztikus modulus hőmérsékletfüggése
- Tömítés teljesítménye: Súrlódási együttható változások
Terhelésfüggőségi elemzés
A külső terhelések komplex hiszterézis mintákat hoznak létre:
- Statikus terhelések: Állandó erő hatása a pozicionálásra
- Dinamikus terhelések: Változó erőhatás mozgás közben
- Inerciális hatások: Gyorsulásfüggő pozicionálási hibák
- Súrlódási eltérések: A felület állapota hatással van a teljesítményre
Melyek a leghatékonyabb módszerek a hiszterézis minimalizálására a rendszerében?
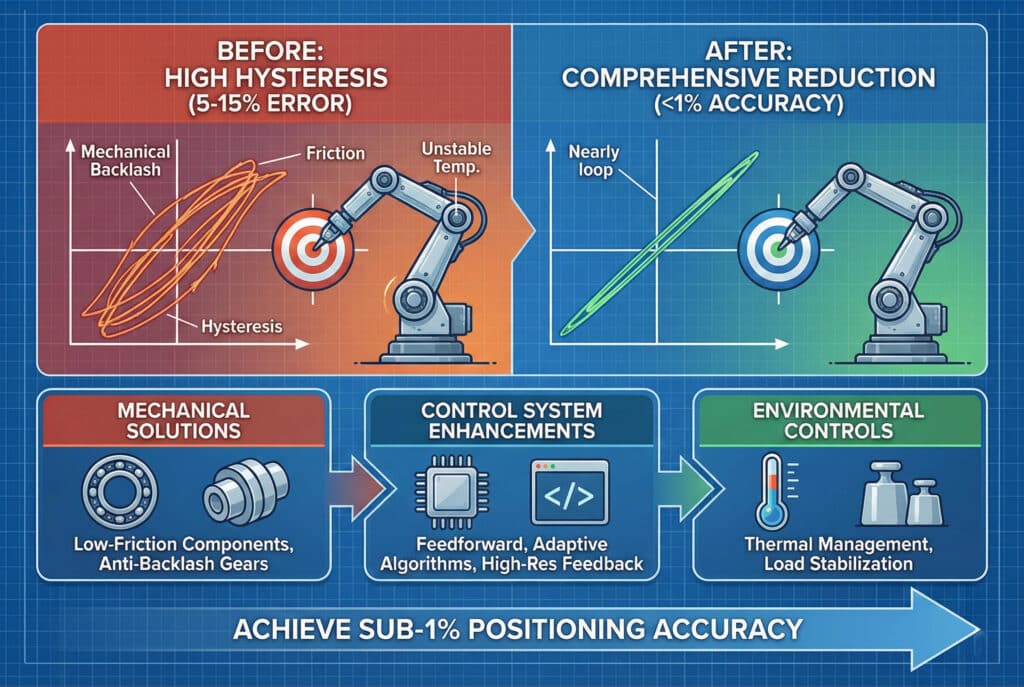
Átfogó hiszterézis-csökkentési stratégiák alkalmazásával 1% alatti pozicionálási pontosság érhető el igényes arányos vezérlési alkalmazásokban.
A hatékony hiszterézis minimalizálás ötvözi a mechanikai fejlesztéseket, beleértve az alacsony súrlódású alkatrészeket és a holtjáték kiküszöbölését, a vezérlőrendszer fejlesztéseit előrejelző kompenzációval és adaptív algoritmusokkal, valamint a hőmérséklet és a terhelés stabilitásának környezeti szabályozását, ami általában 5-15%-ről 1% alá csökkenti a hiszterézist a teljes skálán.
Mechanikai megoldások
Alkatrészek kiválasztása és tervezése
Válasszon kifejezetten alacsony hiszterézisre tervezett alkatrészeket:
- Precíziós csapágyak: Kiváló minőségű lineáris vezetők minimális holtjátékkal
- Alacsony súrlódású tömítések: Fejlett tömítőanyagok és kivitelek
- Rigid csatlakozások: A mechanikus holtjáték forrásainak kiküszöbölése
- Előre telepített rendszerek: Mechanikus előfeszítés a holtzónák kiküszöbölésére
Rendszerarchitektúra fejlesztések
Mechanikus rendszerek tervezése a hiszterézis források minimalizálása érdekében:
| Tervezési jellemző | Hiszterézis csökkentés | Végrehajtás költsége | Karbantartási hatás |
|---|---|---|---|
| Közvetlen meghajtás | 80-90% | Magas | Alacsony |
| Előre betöltött útmutatók | 60-70% | Közepes | Közepes |
| Precíziós tengelykapcsolók | 40-50% | Alacsony | Alacsony |
| Visszalökésgátló fogaskerekek | 70-80% | Közepes | Magas |
Vezérlőrendszer-fejlesztések
Szoftverkompenzációs technikák
A fejlett vezérlő algoritmusok jelentősen csökkenthetik a hiszterézis hatásokat:
- Hiszterézis-térkép: Pozíciókorrekciós keresőtáblák
- Előremenő szabályozás: Parancsirányon alapuló prediktív kompenzáció
- Adaptív algoritmusok: Öntanuló hiszterézis-kompenzáció
- Modellalapú vezérlés: Fizikaalapú hiszterézis-előrejelzés
Visszajelzési rendszer fejlesztései
A továbbfejlesztett visszacsatolási rendszerek jobb hiszterézis-kompenzációt tesznek lehetővé:
- Magasabb felbontású kódolók: Javított pozíciómérési pontosság
- Több visszacsatoló érzékelő: Redundáns helyzetmérés
- Sebesség visszacsatolás: Áralapú kompenzációs algoritmusok
- Erővisszacsatolás: Terhelésfüggő hiszterézis-kompenzáció
Környezetvédelmi stratégiák
Hőmérséklet-szabályozás
A stabil üzemi hőmérséklet csökkenti a hiszterézis-ingadozásokat:
- Hőszigetelés: Védje a működtetőket a hőmérséklet-ingadozásoktól
- Aktív hűtés: Tartsa állandó üzemi hőmérsékletet
- Hőmérséklet-kompenzáció: Szoftveres korrekció a hőhatásokra
- Termikus előkészítés: Lehetővé tenni a rendszerek hőegyensúlyba kerülését
Terhelés stabilizálása
Az állandó terhelési feltételek minimalizálják a hiszterézis-eltéréseket:
- Terhelés elszigetelése: Külső zavarok leválasztása
- Ellensúlyozás: Csökkentse a gravitációs terhelés hatását
- Rezgéscsillapítás: Minimalizálja a dinamikus terhelésváltozásokat
- Folyamatoptimalizálás: Csökkentse a változó külső erőket
Sarah, egy coloradói gyógyszeripari csomagolóüzem folyamatmérnöke, végrehajtotta átfogó hiszterézis-csökkentési programunkat. Tabletta-számlálási pontossága 98,51 TP3T-ről 99,81 TP3T-re javult, ezzel megfelelve az FDA követelményeinek, miközben havonta 1 TP4T25 000-rel csökkentette a hulladékot. 💊
Fejlett kompenzációs technikák
Dither jel alkalmazás
A nagyfrekvenciás gerjesztés képes leküzdeni a súrlódáson alapuló hiszterézist:
- Frekvencia kiválasztás: Válasszon a rendszer sávszélességénél magasabb frekvenciákat
- Amplitúdó optimalizálás: A hatékonyság és a rendszer stabilitásának egyensúlya
- Hullámforma tervezés: Színuszos, háromszög alakú vagy véletlenszerű jelek
- Végrehajtási módszerek: Hardver vagy szoftver generáció
Prediktív vezérlési módszerek
A modellalapú megközelítések kiváló hiszterézis-kompenzációt biztosítanak:
- Rendszerazonosítás: Matematikai modell kidolgozása
- Kalman-szűrés: Optimális állapotbecslés
- Modellprediktív vezérlés: Jövőbeli állapot optimalizálása
- Adaptív modellezés: Valós idejű modellparaméter-frissítések
Karbantartás és kalibrálás
Rendszeres kalibrációs eljárások
A rendszeres kalibrálás alacsony hiszterézis teljesítményt biztosít:
- Időszakos hiszterézis-térképezés: A teljesítményváltozások dokumentálása
- Alkatrészellenőrzés: A kopással kapcsolatos minőségromlás azonosítása
- Kenés karbantartása: Az optimális súrlódási szint fenntartása
- Igazítás ellenőrzése: Gondoskodjon a mechanikai pontosságról
Előrejelző karbantartási stratégiák
A proaktív karbantartás megakadályozza a hiszterézis romlását:
- Teljesítmény trend: A hiszterézis időbeli változásának nyomon követése
- Alkatrészek élettartamának nyomon követése: Cserélje ki az alkatrészeket a meghibásodás előtt
- Állapotfigyelés: Folyamatos rendszerállapot-értékelés
- Megelőző csere: A karbantartás ütemezése a használat alapján
A Bepto hiszteréziscsökkentő csomagjai általában 70-85%-es javulást érnek el a pozicionálási pontosság terén, és sok ügyfelünk 0,5% alatti hiszterézis szintet jelentett a legigényesebb alkalmazásokban – ez a teljesítmény közvetlenül magasabb termékminőséget és kevesebb hulladékot jelent. 🎯
Következtetés
A hiszterézis megértése és szabályozása elengedhetetlen a pontos arányos működtető vezérlés eléréséhez, amely szisztematikus mérést, célzott kompenzációt és folyamatos karbantartást igényel az optimális teljesítmény érdekében.
Gyakran ismételt kérdések a hiszterézisről a proporcionális működtető vezérlésben
K: Mi tekinthető elfogadható hiszterézisnek a proporcionális működtető rendszerekben?
Az elfogadható hiszterézis az alkalmazás követelményeitől függ: az általános automatizálás 2-5%-t tolerál, a precíziós szerelés 1% alatt van, az ultraprecíziós alkalmazások pedig 0,5% alatti hiszterézis szintet igényelnek. Bepto rendszereink megfelelő megvalósítás esetén általában 0,3-0,8% hiszterézist érnek el.
K: A szoftveres kompenzáció teljesen kiküszöbölheti a mechanikus hiszterézist?
A szoftveres kompenzáció 60-80%-vel csökkentheti a hiszterézist, de nem tudja teljesen kiküszöbölni a mechanikai forrásokat, mint például a holtjátékot és a súrlódást. A mechanikai fejlesztések és a szoftveres kompenzáció kombinálásával érhetők el a legjobb eredmények, általában 1% alatti teljes rendszer hiszterézis mellett.
K: Milyen gyakran kell újrakalibrálnom a hiszterézis arányos vezérlőrendszerét?
A kalibrálás gyakorisága a használat intenzitásától és a pontossági követelményektől függ: a nagy pontosságú rendszereket havonta kell kalibrálni, az általános alkalmazások esetében negyedéves ellenőrzés szükséges, míg az alacsony pontosságú rendszerek esetében elegendő az éves kalibrálás és a folyamatos teljesítményfigyelés.
K: Mi a különbség a hiszterézis és a holtjáték között a működtető rendszerekben?
A holtjáték a csatlakozások és fogaskerekek mechanikai holtjátéka, míg a hiszterézis minden pozíciófüggő hatást magában foglal, beleértve a súrlódást, a mágneses hatásokat és a vezérlőrendszer holttereit. A holtjáték a teljes rendszer hiszterézisének egyik összetevője.
K: Honnan tudom, hogy a hiszterézis okozza a pozicionálási problémáimat?
A hiszterézis jellegzetes mintázatokat hoz létre: az iránytól függő állandó pozicionálási hibák, eltérő pontosság felfelé és lefelé mozgás esetén, valamint ismétlődő hibamintázatok. A kétirányú pozicionálási tesztek hiszterézis hurkokat mutatnak, amelyek megerősítik a diagnózist.
-
Ismerje meg a hiszterézis fizikai alapelveit és annak hatását a pontosságra különböző mérnöki tudományágakban. ↩
-
Ismerje meg a mechanikus kapcsolódásokban fellépő holtjáték kiküszöbölésének okait és műszaki megoldásait. ↩
-
Fedezze fel a proporcionális pneumatikus vezérlő szelepek belső működését és működési elveit. ↩
-
Fedezze fel a tapadás-csúszás jelenség mögötti mechanizmust és annak hatását az alacsony sebességű működtető mozgására. ↩
-
Mélyebb ismereteket szerezhet a PID-szabályozás elméletéről és annak ipari automatizálásban való alkalmazásáról. ↩
