

Histerezė1 yra nematomas tikslumo žudikas, tykantis kiekvienoje proporcinėje pavaros sistemoje – tyliai sunaikindamas pozicionavimo tikslumą iki 15%, o inžinieriai kaltina viską, išskyrus tikrąjį kaltininką. Dėl šio reiškinio pavaros “įsimena” savo ankstesnes pozicijas, sukeldamos nenuspėjamas negyvas zonas, kurios paverčia sklandų valdymą frustruojančiu nenuoseklumu. 😠
Proporcinio pavaros valdymo histerezė sukelia 2–15% visos eigos padėties nustatymo paklaidas dėl mechaninio atsiliekimo, sandariklio trinties, magnetinių efektų ir valdymo vožtuvo nejautrumo zonų, todėl reikia kompensuoti programinės įrangos algoritmais, mechaniniu išankstiniu įtempimu, didesnės skiriamosios gebos grįžtamuoju ryšiu ir tinkamu komponentų parinkimu, kad būtų pasiektas mažesnis nei 1% padėties nustatymo tikslumas.
Prieš du mėnesius dirbau su Jennifer, kontrolės inžiniere aeronautikos gamybos įmonėje Sietle, kurios precizinių surinkimo robotai nuolat nukrypdavo nuo tikslo 3 mm – neatsitiktinai, bet pagal nuspėjamą modelį, kuris rodė histerezę. Įdiegus mūsų „Bepto“ antihisterezės sprendimus, jos padėties nustatymo paklaidos sumažėjo iki mažiau nei 0,5 mm. ✈️
Turinys
- Kas tiksliai yra histerezė ir kodėl ji atsiranda proporcinių pavarų mechanizmuose?
- Kaip histerezė veikia skirtingų tipų proporcines valdymo sistemas?
- Kokios matavimo technikos geriausiai identifikuoja ir kiekybiškai įvertina histerezės efektus?
- Kokie yra veiksmingiausi būdai sumažinti sistemos histerezę?
Kas tiksliai yra histerezė ir kodėl ji atsiranda proporcinių pavarų mechanizmuose?
Histerezės mechanizmų supratimas yra būtinas norint pasiekti tikslų proporcinį valdymą pneumatinėse ir hidraulinėse pavarų sistemose.
Histerezė atsiranda, kai pavaros išėjimo padėtis priklauso tiek nuo dabartinio įvesties komandos, tiek nuo ankstesnės padėties istorijos, sukuriant skirtingus atsako kelius didėjančioms ir mažėjančioms komandoms dėl mechaninio atsiliekimo, trinties jėgų, magnetinių efektų ir valdymo vožtuvo nejautrumo zonų, kurios kaupiasi visoje valdymo grandinėje.
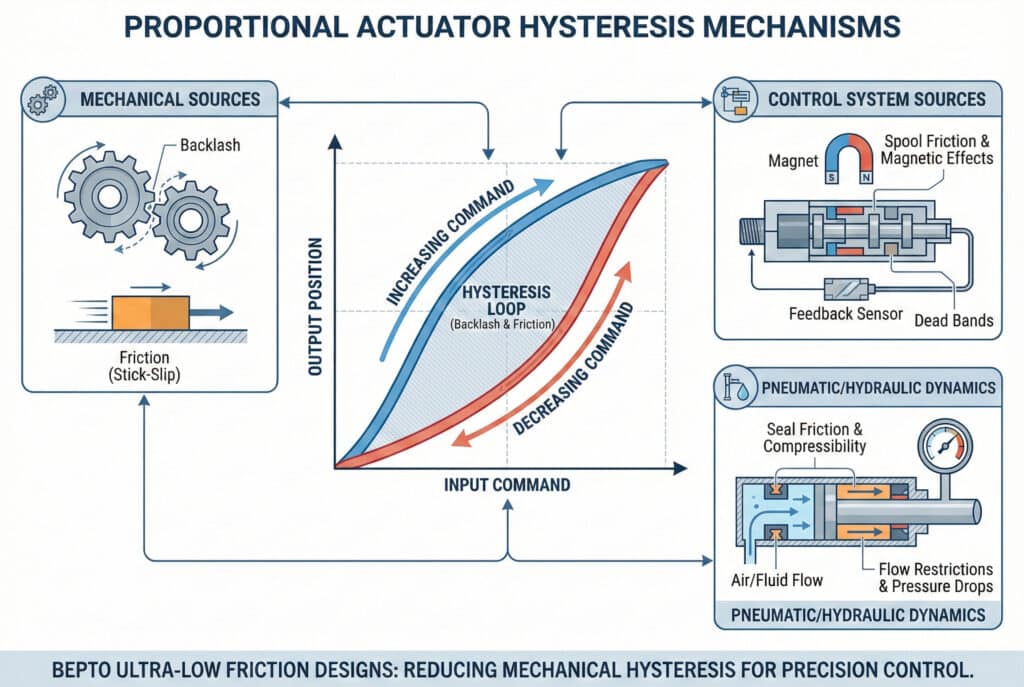
Pagrindiniai histerezės mechanizmai
Mechaniniai šaltiniai
Fiziniai komponentai turi didelę įtaką sistemos histerezės atsiradimui:
- Atgalinė reakcija2: Pavarų mechanizmai, movos ir jungtys sukuria negyvas zonas
- Trintis: Statinės ir kinetinės trinties skirtumai sukelia lipimo-slydimo reiškinį
- Atitiktis: Elastinė deformacija mechaninėse jungtyse
- Dėvėjimo modeliai: Komponentų nusidėvėjimas sukuria nereguliarias kontaktines paviršius
Valdymo sistemos šaltiniai
Elektroniniai ir pneumatiniai valdymo elementai prideda histerezę:
| Komponentų tipas | Tipinė histerezė | Pagrindinė priežastis | Poveikio švelninimo strategija |
|---|---|---|---|
| Servo vožtuvai | 0.1-0.5% | Ritės trintis | Aukšto dažnio ditheris |
| Proporciniai vožtuvai3 | 0.5-2% | Magnetinė histerezė | Atsiliepimų kompensavimas |
| Padėties jutikliai | 0.05-0.2% | Elektroninis triukšmas | Signalo filtravimas |
| Stiprintuvai | 0.1-0.3% | Nereaguojančios zonos nustatymai | Kalibravimo reguliavimas |
Fizinės pneumatinės sistemos kilmė
Sandariklio trinties poveikis
Pneumatinės sandarikliai sukuria reikšmingus histerezės šaltinius:
- Atsiskyrimo trintis: Reikalinga didesnė jėga judesiui pradėti
- Bėgimo trintis: Mažesnė jėga nuolatinio judėjimo metu
- lipnumo ir slydimo elgsena4: Nereguliarus judėjimas mažais greičiais
- Temperatūros priklausomybė: Trintis kinta priklausomai nuo darbo temperatūros
Slėgio dinamika
Pneumatinės sistemos slėgio poveikis prisideda prie histerezės:
- Suspaudžiamumas: Oro suspaudimas sukuria spyruoklės tipo elgesį
- Srauto apribojimai: Vožtuvų ir jungčių apribojimai sukelia vėlavimus
- Slėgio kritimas: Linijos nuostoliai sukuria nuo padėties priklausančias jėgas
- Temperatūros poveikis: Šiluminė plėtra veikia sistemos standumą
„Bepto“ sukūrėme be strypų cilindrus su itin mažos trinties sandarikliais ir tiksliai pagamintomis kreipiamosiomis sistemomis, kurios sumažina mechaninę histerezę 60%, palyginti su standartiniais modeliais – tai yra labai svarbu aukšto tikslumo proporcinio valdymo taikymams. 🎯
Apkrovos priklausoma histerezė
Kintamojo krūvio poveikis
Išorinės apkrovos turi didelę įtaką histerezės charakteristikoms:
- Gravitacinės apkrovos: Nuo padėties priklausomi jėgos pokyčiai
- Inercinės apkrovos: Nuo pagreičio priklausomi jėgos reikalavimai
- Proceso apkrovos: Kintamos išorinės jėgos eksploatacijos metu
- Trinties apkrovos: Paviršiaus sąlyčio jėgos svyravimai
Dinaminės apkrovos sąveikos
Judantys kroviniai sukuria sudėtingus histerezės modelius:
- Pagreičio poveikis: Inercinės jėgos greičio pokyčių metu
- Vibracijos mova: Išorinės vibracijos daro įtaką padėties nustatymui
- Rezonansinės sąveikos: Natūralaus dažnio sužadinimas
- Slopinimo variacijos: Apkrovos priklausomos slopinimo charakteristikos
Kaip histerezė veikia skirtingų tipų proporcines valdymo sistemas?
Histerezės efektai labai skiriasi priklausomai nuo skirtingų pavarų technologijų ir valdymo architektūros, todėl reikalingos pritaikytos kompensavimo strategijos.
Atvirosios grandinės proporcinės sistemos patiria 5–15% histerezės paklaidas be koregavimo galimybės, o uždarosios grandinės sistemos gali sumažinti histerezę iki 0,5–2% per grįžtamojo ryšio kompensavimą, o pažangios servosistemos pasiekia mažesnį nei 0,1% tikslumą naudodamos aukštos skiriamosios gebos kodavimo įrenginius ir sudėtingus valdymo algoritmus.
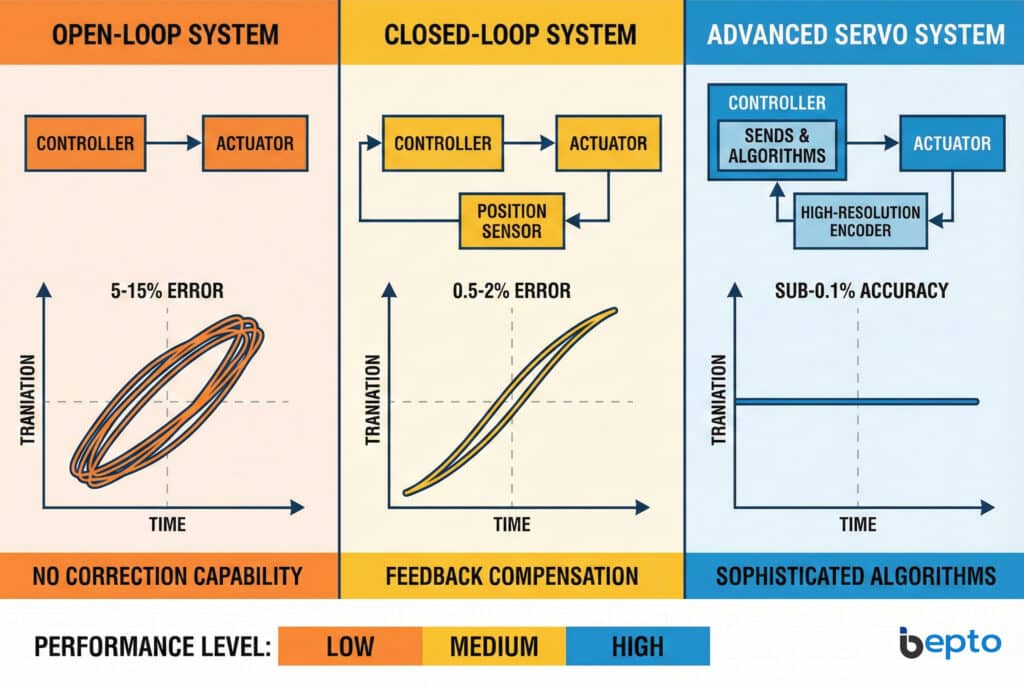
Atvirosios grandinės valdymo sistemos
Būdingi apribojimai
Atvirosios grandinės sistemos negali kompensuoti histerezės efekto:
- Nėra atsiliepimų pataisymų: Klaidos kaupiasi nepastebimos
- Nuspėjami modeliai: Histerezė sukelia pasikartojančias padėties nustatymo klaidas
- Jautrumas temperatūrai: Našumas priklauso nuo darbo sąlygų
- Įkrovos priklausomybė: Skirtingi kroviniai sukuria skirtingus histerezės modelius
Tipinės veikimo charakteristikos
Atvirosios grandinės sistemos histerezės charakteristikos skiriasi priklausomai nuo taikymo:
| Taikymo tipas | Histerezės diapazonas | Priimtini naudojimo būdai | Našumo apribojimai |
|---|---|---|---|
| Paprastas padėties nustatymas | 5-15% | Nekritinės užduotys | Prastas pakartojamumas |
| Greičio valdymas | 3-8% | Apytikslis greičio reguliavimas | Kintamas našumas |
| Jėgos kontrolė | 10-25% | Pagrindinės jėgos taikymas | Nesuderinti rezultatai |
| Daugiaašės sistemos | 8-20% | Paprasta automatizacija | Kaupiamosios klaidos |
Uždarojo kontūro valdymo sistemos
Atsiliepimų kompensavimo nauda
Uždarosios grandinės sistemos gali aktyviai kompensuoti histerezę:
- Klaidų aptikimas: Nuolatinis padėties stebėjimas
- Realaus laiko korekcija: Greitas reagavimas į padėties nustatymo klaidas
- Prisitaikantis valdymas: Mokymosi algoritmai pagerina našumą
- Trikdžių atmetimas: Išorinės jėgos kompensavimas
Kontrolės algoritmo efektyvumas
Skirtingos valdymo strategijos skirtingai sprendžia histerezės problemą:
- PID reguliavimas5: Pagrindinė kompensacija, 2-5% liekamoji histerezė
- Išankstinis valdymas: Prognozuojamas kompensavimas, 1-3% likutis
- Prisitaikantis valdymas: Mokymosi kompensavimas, 0,5–2% likutis
- Modelio pagrįstas valdymas: Teorinė kompensacija, 0,1–1% likutis
Servo valdymo sistemos
Išplėstinės kompensavimo technikos
Aukštos kokybės servo sistemos naudoja sudėtingą histerezės kompensavimą:
- Histerezės žemėlapis: Sistemos charakteristikos ir kompensavimo lentelės
- Išankstinio įkrovimo technikos: Mechaninis šališkumas, siekiant pašalinti negyvas zonas
- Dither signalai: Aukšto dažnio sužadinimas, siekiant įveikti trintį
- Prognozavimo algoritmai: Modelio pagrįstas histerezės prognozavimas
Michaelis, robotikos inžinierius tiksliosios gamybos įmonėje Šiaurės Karolinoje, savo surinkimo linijoje įdiegė mūsų rekomenduojamus servo valdymo atnaujinimus. Jo pozicionavimo tikslumas pagerėjo nuo ±2,5 mm iki ±0,3 mm, dėl to produkto defektų skaičius sumažėjo 75%, o per mėnesį sutaupyta $50 000 perdarymo išlaidų. 🤖
Daugiaašių sistemų iššūkiai
Kaupiamasis poveikis
Kelių pavarų sudėtinės histerezės problemos:
- Klaidų kaupimas: Atskirų ašių paklaidos sudaro
- Susiejimo poveikis: Ašių sąveika sukuria sudėtingus modelius
- Sinchronizavimo problemos: Skirtingi histerezės modeliai sukelia koordinavimo problemas
- Kalibravimo sudėtingumas: Kelioms sistemoms reikia individualaus derinimo
Koordinavimo strategijos
Pažangios daugiaašės sistemos naudoja specializuotas technologijas:
- Pagrindinio-pagalbinio valdymo sistema: Viena ašis veda, kitos seka
- Kryžminio sujungimo kompensavimas: Ašies sąveikos korekcija
- Sinchronizuotas padėties nustatymas: Koordinuoti judesio profiliai
- Visuotinis optimizavimas: Sistemos veikimo optimizavimas
Kokios matavimo technikos geriausiai identifikuoja ir kiekybiškai įvertina histerezės efektus?
Tikslūs histerezės matavimai ir charakterizavimas leidžia efektyviai kurti kompensavimo strategijas ir optimizuoti sistemas.
Histerezės matavimui reikalingi dvikrypčiai padėties nustatymo bandymai su aukštos skiriamosios gebos kodavimo įrenginiais, padėties ir komandos santykių registravimas per visus ciklus, kilpos pločio ir asimetrijos modelių analizė bei temperatūros ir apkrovos priklausomybės dokumentavimas, siekiant sukurti išsamius kompensavimo žemėlapius, užtikrinančius optimalų valdymo našumą.
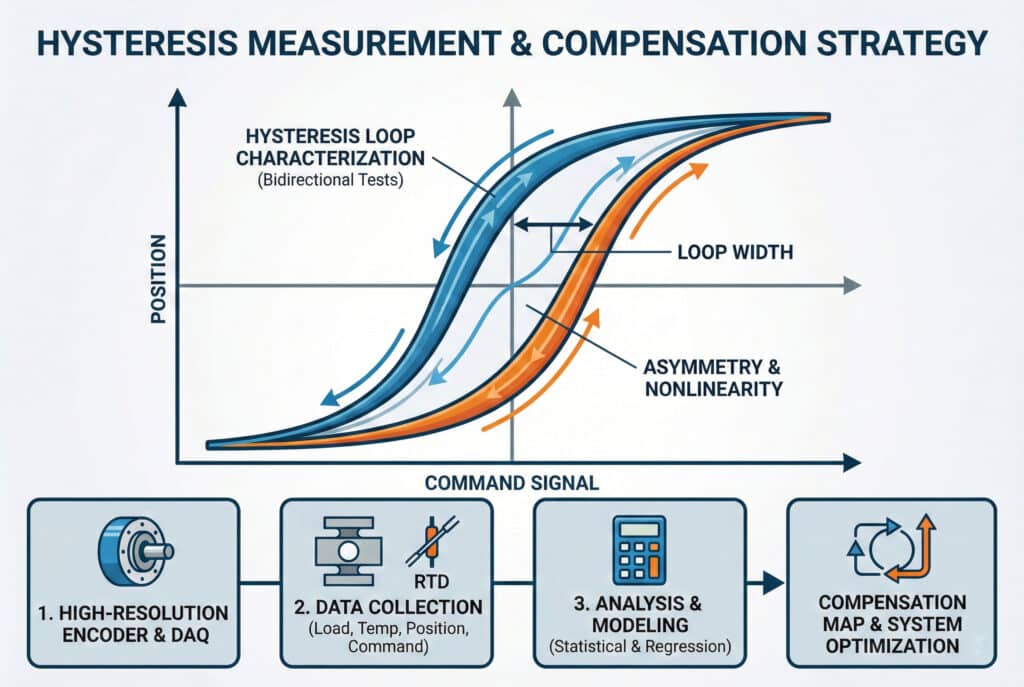
Standartiniai matavimo protokolai
Dvikrypčiai padėties nustatymo bandymai
Išsamus histerezės charakterizavimas reikalauja sistemingų bandymų:
- Pilni eigos ciklai: Visi išsitiesimo ir susitraukimo sekos
- Keli greičiai: Įvairūs greičio profiliai, skirti nustatyti priklausomybę nuo greičio
- Apkrovos svyravimai: Įvairios išorinės apkrovos, skirtos apkrovos poveikiui atvaizduoti
- Temperatūros diapazonai: Darbinės temperatūros poveikio vertinimas
Duomenų rinkimo reikalavimai
Tikslus histerezės matavimas reikalauja aukštos kokybės prietaisų:
| Matavimo parametras | Reikalinga rezoliucija | Tipinė įranga | Tikslumas Tikslas |
|---|---|---|---|
| Grįžtamasis ryšys apie padėtį | 0,01% insulto | Linijinis daviklis | ±0,005% |
| Komandos signalas | Mažiausiai 12 bitų | DAQ sistema | ±0,1% |
| Krovinio matavimas | 1% vardinė jėga | Apkrovos elementas | ±0,5% |
| Temperatūra | ±1°C | RTD jutiklis | ±0.5°C |
Analizės metodai
Histerezės kilpos charakteristika
Matematinė analizė atskleidžia histerezės charakteristikas:
- Kilpos plotis: Maksimalus padėties skirtumas esant tam pačiam komandai
- Asimetrija: Kryptinis poslinkis padėties nustatymo paklaidos
- Netiesiškumas: Nuokrypis nuo idealios linijinės reakcijos
- Pakartojamumas: Nuoseklumas per kelis ciklus
Statistinės analizės metodai
Išplėstinės analizės metodikos kiekybiškai įvertina histerezės efektus:
- Standartinis nuokrypis: Padėties pakartojamumo matavimas
- Koreliacijos analizė: Įvesties ir išvesties santykio stiprumas
- Dažnio analizė: Dinaminės reakcijos charakteristikos
- Regresijos analizė: Matematinio modelio kūrimas
Realaus laiko stebėjimo sistemos
Nuolatinis histerezės sekimas
Gamybos sistemos gauna naudos iš nuolatinio histerezės stebėjimo:
- Įterptieji jutikliai: Įmontuotos padėties grįžtamojo ryšio sistemos
- Duomenų registravimas: Nuolatinis veiklos įrašymas
- Tendencijų analizė: Ilgalaikio našumo mažėjimo stebėjimas
- Prognozuojama priežiūra: Ankstyvas komponentų nusidėvėjimo įspėjimas
Mūsų „Bepto“ diagnostikos sistemos apima realaus laiko histerezės stebėjimą, kuris įspėja operatorius, kai padėties nustatymo paklaidos viršija 0,5% ribas, leidžiant atlikti prevencinę techninę priežiūrą, kol tikslumas nesumažėja iki nepriimtino lygio. 📊
Poveikio aplinkai vertinimas
Temperatūros poveikis
Temperatūra turi didelę įtaką histerezės charakteristikoms:
- Šiluminis plėtimasis: Mechaniniai matmenų pokyčiai
- Klampumo pokyčiai: Skysčių savybių pokyčiai
- Medžiagos savybės: Elastinio modulio priklausomybė nuo temperatūros
- Sandariklio veikimas: Trinties koeficiento svyravimai
Apkrovos priklausomybės analizė
Išorinės apkrovos sukuria sudėtingus histerezės modelius:
- Statinės apkrovos: Nuolatinės jėgos poveikis padėties nustatymui
- Dinaminės apkrovos: Kintamos jėgos poveikis judesio metu
- Inercinis poveikis: Nuo pagreičio priklausančios padėties nustatymo paklaidos
- Trinties svyravimai: Paviršiaus būklės įtaka veikimui
Kokie yra veiksmingiausi būdai sumažinti sistemos histerezę?
Įgyvendinant išsamias histerezės mažinimo strategijas, sudėtingose proporcinio valdymo taikymuose galima pasiekti mažesnį nei 1% pozicionavimo tikslumą.
Efektyvus histerezės mažinimas apima mechaninius patobulinimus, įskaitant mažos trinties komponentus ir atsilaisvinimo pašalinimą, valdymo sistemos patobulinimus su išankstiniu kompensavimu ir prisitaikančiais algoritmais, taip pat aplinkos kontrolę, užtikrinančią temperatūros ir apkrovos stabilumą, paprastai sumažinant histerezę nuo 5-15% iki mažiau nei 1% visos skalės.
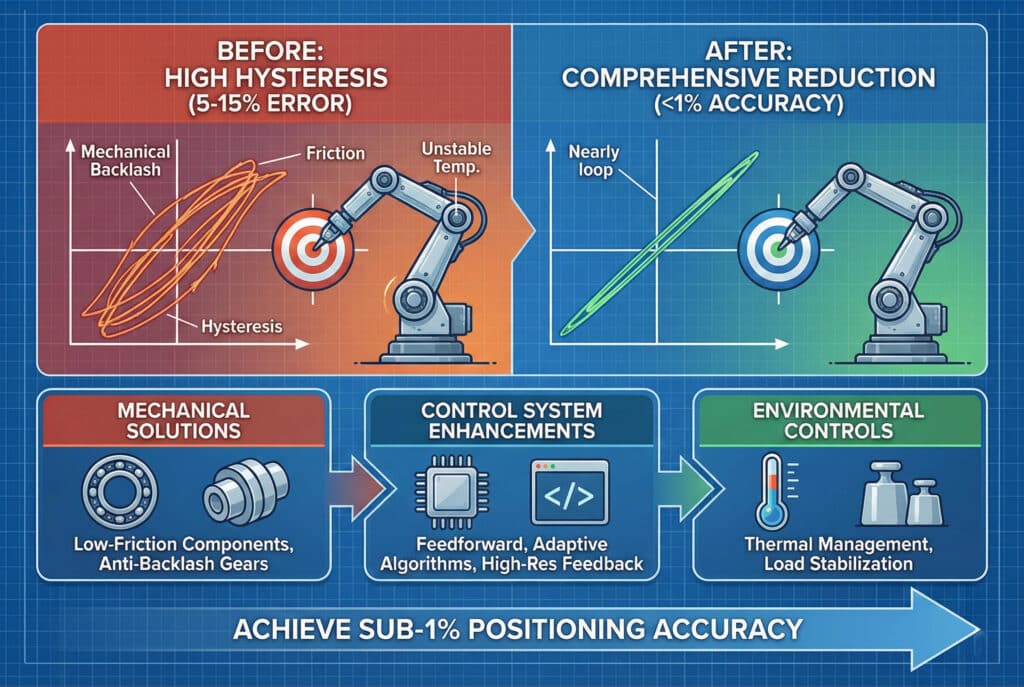
Mechaniniai sprendimai
Komponentų parinkimas ir projektavimas
Rinkitės komponentus, specialiai suprojektuotus mažam histerezės koeficientui:
- Tikslūs guoliai: Aukštos kokybės linijiniai kreipiamieji su minimaliu laisvumu
- Mažos trinties sandarikliai: Pažangios sandarinimo medžiagos ir konstrukcijos
- Standžios movos: Pašalinkite mechaninio atsiliekimo šaltinius
- Iš anksto įdiegtos sistemos: Mechaninis šališkumas, siekiant pašalinti negyvas zonas
Sistemos architektūros patobulinimai
Projektuokite mechanines sistemas taip, kad būtų sumažinti histerezės šaltiniai:
| Dizaino funkcija | Histerezės mažinimas | Įgyvendinimo išlaidos | Priežiūros poveikis |
|---|---|---|---|
| Tiesioginė pavara | 80-90% | Aukštas | Žemas |
| Iš anksto įkelti vadovai | 60-70% | Vidutinis | Vidutinis |
| Tiksliosios movos | 40-50% | Žemas | Žemas |
| Nuo atsilenkimo saugantys krumpliaračiai | 70-80% | Vidutinis | Aukštas |
Valdymo sistemos patobulinimai
Programinės įrangos kompensavimo metodai
Pažangūs valdymo algoritmai gali žymiai sumažinti histerezės efektus:
- Histerezės žemėlapis: Pozicijos koregavimo paieškos lentelės
- Išankstinis valdymas: Prognozuojamas kompensavimas pagal komandos nurodymus
- Prisitaikantys algoritmai: Savaiminio mokymosi histerezės kompensavimas
- Modelio pagrįstas valdymas: Fizikos pagrįstas histerezės prognozavimas
Atsiliepimų sistemos patobulinimai
Patobulintos grįžtamojo ryšio sistemos užtikrina geresnį histerezės kompensavimą:
- Aukštesnės skiriamosios gebos kodavimo įrenginiai: Pagerintas padėties matavimo tikslumas
- Keli grįžtamojo ryšio jutikliai: Redundantiškas padėties matavimas
- Greitio grįžtamasis ryšys: Tarifais pagrįsti kompensavimo algoritmai
- Jėgos grįžtamasis ryšys: Apkrovos priklausoma histerezės kompensacija
Aplinkos kontrolės strategijos
Temperatūros valdymas
Stabili darbo temperatūra sumažina histerezės svyravimus:
- Šilumos izoliacija: Apsaugokite pavaras nuo temperatūros svyravimų
- Aktyvus aušinimas: Palaikykite pastovią darbo temperatūrą
- Temperatūros kompensavimas: Programinė įranga, skirta terminiams efektams koreguoti
- Terminis paruošimas: Leisti sistemoms pasiekti terminę pusiausvyrą
Krovinio stabilizavimas
Nuoseklios apkrovos sąlygos sumažina histerezės svyravimus:
- Apkrovos izoliacija: Atskirti išorinius trukdžius
- Priešsvoris: Sumažinti gravitacinės apkrovos poveikį
- Vibracijos slopinimas: Sumažinkite dinamiškus apkrovos svyravimus
- Proceso optimizavimas: Sumažinti kintamas išorines jėgas
Sara, procesų inžinierė farmacijos produktų pakavimo įmonėje Kolorade, įgyvendino mūsų išsamią histerezės mažinimo programą. Jos tablečių skaičiavimo tikslumas pagerėjo nuo 98,51 TP3T iki 99,81 TP3T, atitinkant FDA reikalavimus ir sumažinant atliekas 1 TP4T25 000 per mėnesį. 💊
Išplėstinės kompensavimo technikos
Dither signalo taikymas
Aukšto dažnio sužadinimas gali įveikti trinties sukeltą histerezę:
- Dažnio pasirinkimas: Pasirinkite dažnius, viršijančius sistemos pralaidumą
- Amplitudės optimizavimas: Subalansuokite efektyvumą ir sistemos stabilumą
- Bangos formos dizainas: Sinusoidiniai, trikampiai arba atsitiktiniai signalai
- Įgyvendinimo metodai: Aparatinės įrangos arba programinės įrangos karta
Prognozavimo kontrolės metodai
Modelio pagrįsti metodai užtikrina puikų histerezės kompensavimą:
- Sistemos identifikavimas: Matematinio modelio kūrimas
- Kalmano filtravimas: Optimalus būsenos įvertinimas
- Modelio prognozinis valdymas: Ateities būklės optimizavimas
- Prisitaikantis modeliavimas: Modelio parametrų atnaujinimai realiuoju laiku
Priežiūra ir kalibravimas
Reguliarios kalibravimo procedūros
Sistemingas kalibravimas užtikrina mažą histerezės veikimą:
- Periodinis histerezės žemėlapis: Dokumentuoti veiklos pokyčius
- Komponentų tikrinimas: Nustatyti nusidėvėjimo sukeltą gedimą
- Tepimo priežiūra: Išlaikykite optimalų trinties lygį
- Suderinimo patikrinimas: Užtikrinti mechaninį tikslumą
Prognozuojamos techninės priežiūros strategijos
Proaktyvi priežiūra užkerta kelią histerezės susidėvėjimui:
- Veiklos tendencijos: Stebėkite histerezės pokyčius laikui bėgant
- Komponentų tarnavimo laiko stebėjimas: Pakeiskite komponentus prieš gedimą
- Būklės stebėjimas: Nuolatinis sistemos būklės vertinimas
- Prevencinis keitimas: Planuokite techninę priežiūrą pagal naudojimą
„Bepto“ histerezės mažinimo paketai paprastai užtikrina 70–85% pozicionavimo tikslumo pagerėjimą, o daugelis klientų teigia, kad jų sudėtingiausiose taikymuose histerezės lygis yra mažesnis nei 0,5%. Tokios charakteristikos tiesiogiai lemia aukštesnę produkto kokybę ir mažesnį atliekų kiekį. 🎯
Išvada
Histerezės supratimas ir kontrolė yra būtini norint pasiekti tikslų proporcinį pavaros valdymą, o tam reikalingi sistemingi matavimai, tikslingas kompensavimas ir nuolatinė priežiūra, kad būtų užtikrintas optimalus veikimas.
Dažnai užduodami klausimai apie histerezę proporcinio pavaros valdymo sistemoje
Klausimas: Kas laikoma priimtina histerezė proporcinių pavarų sistemose?
Priimtinas histerezės lygis priklauso nuo taikymo reikalavimų: bendroji automatika toleruoja 2–5%, tikslus surinkimas reikalauja mažiau nei 1%, o itin tikslūs taikymo atvejai reikalauja mažesnio nei 0,5% histerezės lygio. Mūsų „Bepto“ sistemos, tinkamai įdiegtos, paprastai pasiekia 0,3–0,8% histerezės lygį.
Klausimas: Ar programinė įranga gali visiškai pašalinti mechaninę histerezę?
Programinė kompensacija gali sumažinti histerezę 60–80%, tačiau negali visiškai pašalinti mechaninių šaltinių, pvz., atsiliekimo ir trinties. Derinant mechaninius patobulinimus su programine kompensacija pasiekiami geriausi rezultatai, paprastai mažiau nei 1% bendros sistemos histerezės.
Klausimas: Kaip dažnai turėčiau pakalibruoti savo proporcinės kontrolės sistemą dėl histerezės?
Kalibravimo dažnumas priklauso nuo naudojimo intensyvumo ir tikslumo reikalavimų: didelio tikslumo sistemos turi būti kalibruojamos kas mėnesį, bendrosios paskirties sistemos – kas ketvirtį, o mažo tikslumo sistemos gali būti kalibruojamos kartą per metus, nuolat stebint jų veikimą.
Klausimas: Koks yra skirtumas tarp histerezės ir atsiliekimo aktyviųjų sistemų?
Atatranka yra mechaninis žaidimas jungtyse ir pavarose, o histerezė apima visus nuo padėties priklausančius efektus, įskaitant trintį, magnetinius efektus ir valdymo sistemos neaktyvias zonas. Atatranka yra viena iš bendros sistemos histerezės sudedamųjų dalių.
Klausimas: Kaip sužinoti, ar pozicionavimo problemas sukelia histerezė?
Histerezė sukuria charakteringus modelius: nuoseklius padėties nustatymo paklaidas, priklausančias nuo artėjimo krypties, skirtingą tikslumą judant aukštyn ir žemyn bei pasikartojančius paklaidų modelius. Dvikrypčiai padėties nustatymo bandymai atskleidžia histerezės kilpas, kurios patvirtina diagnozę.
-
Sužinokite apie histerezės fizinius principus ir jos poveikį tikslumui įvairiose inžinerijos srityse. ↩
-
Suprasti mechaninių jungčių atsilaisvinimo priežastis ir inžinerinius sprendimus, kaip jį pašalinti. ↩
-
Susipažinkite su proporcinių pneumatinės valdymo vožtuvų vidine mechanika ir veikimo principais. ↩
-
Atraskite mechanizmą, kuris lemia „stick-slip“ reiškinį, ir sužinokite, kaip jis veikia mažos greitės pavaros judesį. ↩
-
Gaukite gilesnį supratimą apie PID valdymo teoriją ir jos taikymą pramoninėje automatikoje. ↩
