

Įvadas
Jūsų automatizuota surinkimo linija nepataiko į vietą 0,5 mm, o atmestos detalės kaupiasi. 🎯 Jūs tris kartus kalibravote padėties jutiklius, bet neatitikimas išlieka. Paslėpta priežastis nėra jūsų valdymo sistema – tai dinaminė sandariklio histerezė, trinties reiškinys, kuris sukelia nenuspėjamas padėties nustatymo klaidas, dėl kurių gamintojai kasdien praranda tūkstančius dėl atliekų ir perdarymo.
Dinaminė sandariklio histerezė – tai trinties sukeltas atotrūkis tarp nurodytos ir faktinės cilindro padėties, kurį sukelia lipnumo ir slydimo elgsena1, atsiskyrimo jėgos svyravimai ir nuo greičio priklausoma trintis sandarinimo medžiagose – šis histerezis sukelia 0,2–2,0 mm padėties paklaidas standartiniuose pneumatinėse cilindruose, todėl sandarinimo konstrukcija, medžiagų parinkimas ir tepimo optimizavimas yra labai svarbūs taikymuose, kuriuose reikalingas didesnis nei ±0,5 mm pakartojamumas preciziniuose surinkimo, bandymo ir matavimo sistemose.
Praėjusį mėnesį dirbau su Kevinu, elektronikos surinkimo gamyklos Ilinojaus valstijoje valdymo inžinieriumi, kuris susidūrė su problemomis dėl nenuoseklaus komponentų išdėstymo „pick-and-place“ programoje. Nepaisant to, kad jis naudojo aukštos skiriamosios gebos kodavimo įrenginius, jo padėties nustatymo paklaidos siekė nuo 0,3 iki 0,8 mm. Išanalizavę jo sistemą, nustatėme, kad pagrindinė priežastis buvo standartinių cilindrų sandariklių histerezė. Pereitus prie mūsų „Bepto“ mažos trinties cilindrų be strypų su optimizuota sandariklio geometrija, jo padėties nustatymo paklaida sumažėjo iki ±0,15 mm, o brokuotų gaminių skaičius sumažėjo 73%. 📊
Turinys
- Kas yra dinaminė sandarinimo histerezė ir kodėl ji daro įtaką pozicionavimo tikslumui?
- Kaip skirtingi sandariklių dizainai ir medžiagos įtakoja histerezės elgseną?
- Koks yra kiekybiškai įvertinamas sandariklio histerezės poveikis tiksliosioms padėties nustatymo sistemoms?
- Kokios projektavimo strategijos sumažina sandariklio histerezę be strypo cilindruose?
Kas yra dinaminė sandarinimo histerezė ir kodėl ji daro įtaką pozicionavimo tikslumui?
Norint pasiekti automatizuotų sistemų tikslumą, būtina suprasti trinties sukeliamų padėties nustatymo paklaidų fiziką. 🔬
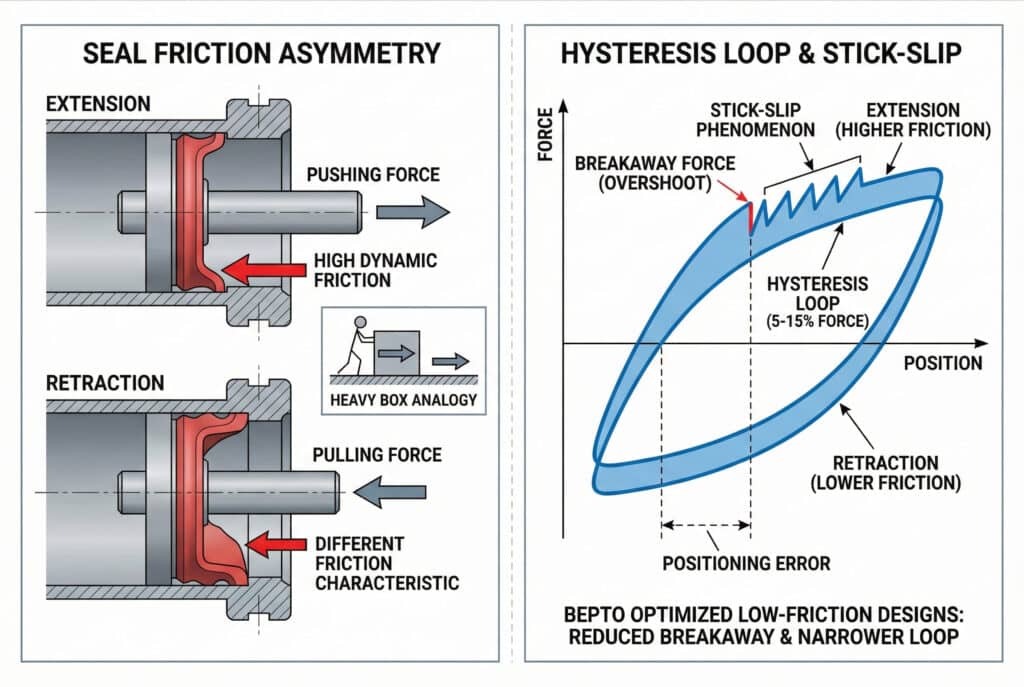
Dinaminė sandariklio histerezė atsiranda, kai trinties jėgos kinta netiesiškai priklausomai nuo greičio ir krypties, sukuriant atotrūkį tarp įėjimo slėgio ir išėjimo padėties—histerezės kilpos plotis (skirtumas tarp išsitiesimo ir susitraukimo jėgos-poslinkio kreivių) paprastai yra 5-15% nuo bendros smūgio jėgos standartiniuose cilindruose, sukeldamas nuo padėties priklausančias paklaidas, kurios susidaro uždaros grandinės sistemose ir trukdo pasiekti submilimetrinį pakartojamumą be kompensavimo algoritmų ar mažos trinties sandariklių konstrukcijų.
Plombos trinties histerezės mechanika
Pagalvokite apie sandariklio histerezę kaip apie skirtumą tarp sunkios dėžės stumimo per grindis ir jos traukimo atgal. Dėl paviršiaus sąveikos, medžiagos deformacijos ir krypties poveikio trintis abiem kryptimis nėra vienodas. Pneumatinėse sandarikliuose ši asimetrija yra dar ryškesnė.
Kai cilindras išsitiesia, sandarinimo lūpa suspaudžiama prie cilindro vienoje kryptimi. Kai cilindras susitraukia, sandarinimas deformuojasi kitaip, sukuriant skirtingas trinties charakteristikas. Taip susidaro histerezės kilpa – grafinis vaizdas, rodantis, kad cilindrui judėti reikalinga jėga priklauso ne tik nuo padėties, bet ir nuo krypties bei greičio istorijos.
Stick-Slip reiškinys ir atitrūkimo jėgos
Labiausiai problematiškas sandariklių histerezės aspektas yra lipnumo-slydimo elgsena. Esant ramybės būsenai, sandarikliai susidaro strigimas2 tai yra 20-50% daugiau nei dinaminė trintis judėjimo metu. Kai slėgis padidėja tiek, kad įveikia šią atitrūkimo jėgą, cilindras staiga “šoktelėja” į priekį ir peršoka tikslinę padėtį.
Šis „stick-slip“ efektas sukuria pjūklo dantų judesio profilį, o ne sklandų judesį. Preciziškame pozicionavime tai pasireiškia taip:
- Peržengimas pradedant iš ramybės būsenos
- Sustabdant svyravimus aplink tikslinę padėtį
- Nuo krypties priklausančios padėties nustatymo paklaidos (skirtingos galutinės padėtys, kai artėjama iš priešingų pusių)
„Bepto“ išmatavome standartinių cilindrų atitrūkimo jėgas, kurios svyruoja nuo 15 iki 35 N 40 mm skersmens cilindrui, o mūsų optimizuotos mažos trinties konstrukcijos sumažina šią jėgą iki 5–12 N – tai yra 60–70 % sumažinimas, kuris žymiai pagerina padėties pastovumą.
Kodėl kontrolės sistemos negali visiškai kompensuoti
Daugelis inžinierių mano, kad uždarojo kontūro padėties valdymas su grįžtamuoju ryšiu gali pašalinti histerezės efektus. Nors grįžtamasis ryšys padeda, jis negali visiškai įveikti pagrindinių fizikos dėsnių. Valdymo sistema mato padėties paklaidą ir taiko korekciją, tačiau histerezė sukuria:
Negyvos zonos: Mažos padėties paklaidos, kurios nesukuria pakankamos jėgos, kad įveiktų trintį.
Ribiniai ciklai: Svyravimai aplink tikslą, kai sistema pakaitomis įveikia ir atleidžia trintį.
Nuo greičio priklausančios paklaidos: Skirtingas pozicionavimo tikslumas esant skirtingiems artėjimo greičiams
Konsultavau dešimtis projektų, kuriuose inžinieriai mėnesius praleido derindami PID reguliatorius, tik tam, kad galiausiai suprastų, jog pagrindinis apribojimas buvo sandariklių trinties histerezė, kurios negalima pašalinti jokiais programinės įrangos derinimais. Sprendimas reikalauja spręsti mechaninę problemą – pačius sandariklius.
Kaip skirtingi sandariklių dizainai ir medžiagos įtakoja histerezės elgseną?
Sandariklio geometrija ir medžiagos savybės iš esmės lemia histerezės dydį ir padėties nustatymo charakteristikas. ⚙️
Sandariklio histerezė labai skiriasi priklausomai nuo konstrukcijos: U formos sandarikliai su agresyviais lūpų kampais sukuria 40–60 N histerezės jėgą 50 mm skersmens cilindruose, o optimizuotos mažos trinties konstrukcijos su sekliomis lūpų kampais ir PTFE medžiagomis sumažina histerezę iki 10–20 N—medžiagos pasirinkimas (poliuretanas, PTFE ar guma) daro įtaką tiek statinio ir dinaminio trinties santykiui (1,3–2,0x), tiek greičiui priklausančiam trinties elgesiui, o PTFE pasižymi nuosekliausiomis trinties charakteristikomis visame greičio diapazone, todėl tinka tiksliam padėties nustatymui.
Sandariklio geometrija ir kontaktinio slėgio pasiskirstymas
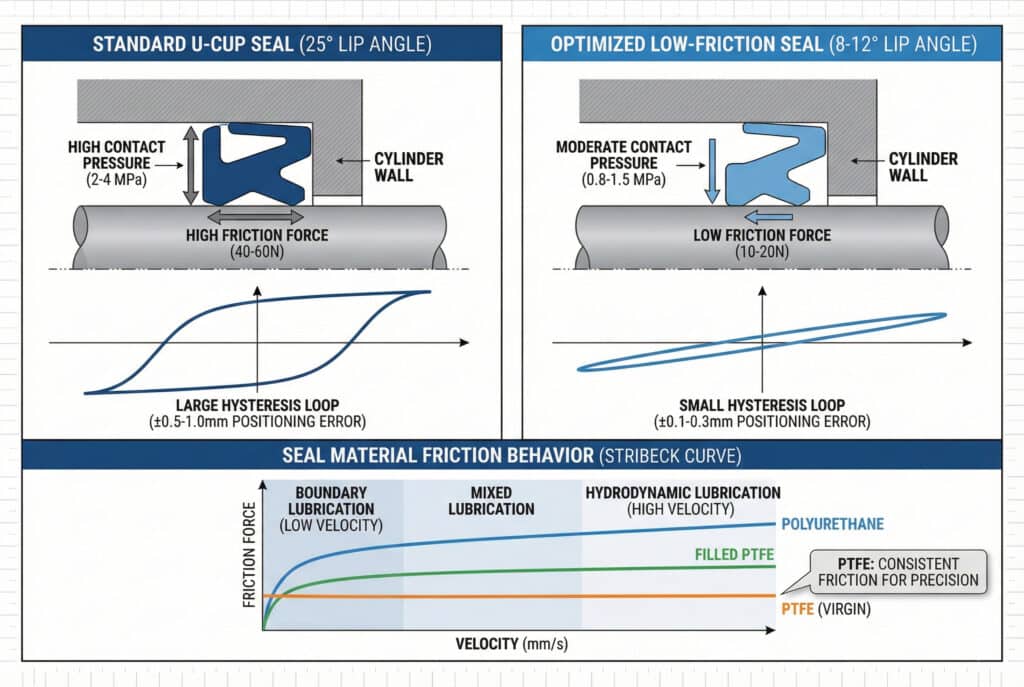
Tarpiklio lūpos kampas ir sąlyčio plotis tiesiogiai lemia trinties jėgą ir histerezės dydį. Tradiciniai U formos tarpikliai naudoja 15–25° lūpos kampą, kad užtikrintų patikimą sandarumą, tačiau tai sukuria didelį sąlyčio slėgį ir trintį.
Standartinis U-formos sandariklis (25° lūpų kampas):
- Didelis kontaktinis slėgis (2–4 MPa)
- Puikus sandarumo patikimumas
- Didelė trinties jėga (40–60 N 50 mm skersmens skyriui)
- Didelė histerezės kilpa (±0,5–1,0 mm padėties nustatymo paklaida)
Mažos trinties optimizuotas sandariklis (8–12° lūpų kampas):
- Vidutinis kontaktinis slėgis (0,8–1,5 MPa)
- Geras sandarumas su tinkamu paviršiaus apdaila
- Maža trinties jėga (10–20 N 50 mm skersmens skyriui)
- Mažas histerezės ciklas (±0,1–0,3 mm padėties nustatymo paklaida)
„Bepto“ sukūrėme patentuotus sandariklių profilius, kurie užtikrina sandarumo patikimumą ir minimalų trintį. Mūsų bešarnyriai cilindrai yra su daugialypės lūpos konstrukcija, kurioje pirminis sandariklis užtikrina slėgio išlaikymą, o antriniai mažo trinties elementai sumažina histerezę.
Medžiagos savybių poveikis trinties savybėms
Skirtingos sandariklių medžiagos pasižymi labai skirtingomis trinties charakteristikomis ir histerezės savybėmis:
| Sandariklio medžiaga | Statinis/dinaminis trinties koeficientas | Greitumo jautrumas | Histerezės jėga (50 mm skersmuo) | Geriausia paraiška |
|---|---|---|---|---|
| NBR (nitrilas) | 1,8–2,0x | Aukštas | 45–65N | Pigūs, netikslūs |
| Poliuretanas | 1,5–1,8x | Vidutinio sunkumo | 30–50 N | Bendroji pramonė |
| PTFE (pirminis) | 1,2–1,4x | Žemas | 8–15 N | Tikslus pozicionavimas |
| Užpildytas PTFE | 1,3–1,5 karto | Žemas | 12–20 N | Subalansuotas veikimas |
| Grafitu užpildytas PU | 1,4–1,6x | Vidutinis-žemas | 20–35N | Ekonomiškas tikslumas |
PTFE molekulinė struktūra užtikrina nepaprastai pastovią trintį visame greičio diapazone. Skirtingai nuo elastomerų, kurių trintis labai priklauso nuo greičio (trintis didėja didėjant greičiui), PTFE trintis išlieka beveik pastovus nuo 1 mm/s iki 1000 mm/s, o tai yra labai svarbu norint užtikrinti nuspėjamą padėtį.
Stribeck kreivė ir tepimo režimai
Plombos trinties elgsena atitinka Stribecko kreivė3, kuriame aprašomi trys tepimo režimai:
Ribinis tepimas (labai mažas greitis):
- Metalo ir metalo kontaktas per tepalinę plėvelę
- Didžiausias trinties koeficientas
- Dominuoja pozicionavimo greičiuose (<10 mm/s)
Mišrus tepimas (vidutinis greitis):
- Dalinis tepalinės plėvelės palaikymas
- Pereinamojo laikotarpio trinties elgsena
- Čia veikia dauguma pozicionavimo programų
Hidrodinaminis tepimas (didelis greitis):
- Visiškas tepalinės plėvelės atskyrimas
- Mažiausia trintis
- Retai pasiekiama pneumatinėse cilindruose
Ribinio tepimo režimo plotis lemia padėties nustatymo histerezę. Medžiagos, turinčios geresnes ribinio tepimo savybes (PTFE, grafitu užpildyti junginiai), išlaiko mažesnį trintį padėties nustatymo greičiuose, sumažindamos histerezę.
Temperatūros poveikis histerezės reiškiniui
Sandariklio trintis nėra pastovus priklausomai nuo temperatūros – jis žymiai keičiasi, kai sistemos įkaista eksploatacijos metu. Standartiniai poliuretano sandarikliai rodo 30–40% trinties sumažėjimą nuo 20 °C iki 60 °C, sukeldami padėties nukrypimą, kai sistemos temperatūra stabilizuojasi.
Dirbau su Sara, bandymų įrangos inžiniere iš Mičigano, kurios tikslumo matavimo sistema ryte ir popietę rodė skirtingą pozicionavimo tikslumą. Jos standartiniai cilindrų sandarikliai buvo jautrūs temperatūrai, todėl sistemos įšilimo metu pozicionavimo nuokrypis siekė 0,4 mm. Juos pakeitėme temperatūrai atspariais „Bepto“ cilindrais su PTFE sandarikliais, ir jos pozicionavimo tikslumas pagerėjo iki ±0,12 mm, nepriklausomai nuo darbo temperatūros. 🌡️
Koks yra kiekybiškai įvertinamas sandariklio histerezės poveikis tiksliosioms padėties nustatymo sistemoms?
Supratimas apie histerezės skaitmeninį poveikį padeda jums pasirinkti tinkamą cilindro technologiją, atitinkančią jūsų tikslumo reikalavimus. 📈
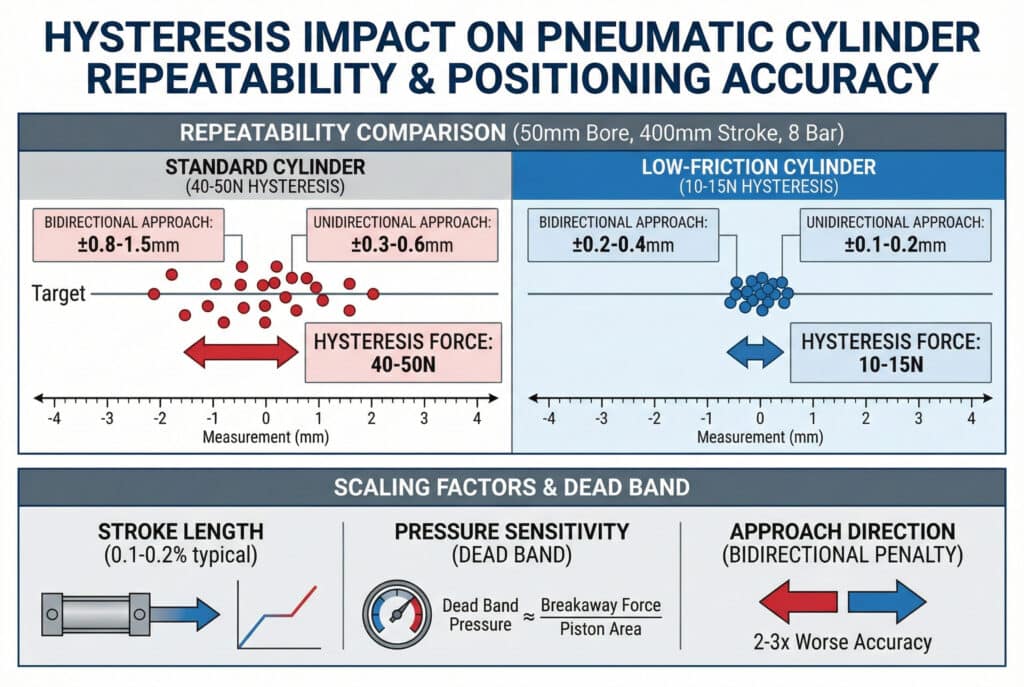
Sandariklio histerezė sukelia kiekybiškai įvertinamas padėties nustatymo paklaidas: standartiniai cilindrai su 40–50 N histerezės jėga pasižymi ±0,5–1,2 mm pakartojamumu esant 8 bar slėgiui, o mažos trinties konstrukcijos su 10–15 N histerezės jėga pasiekia ±0,1–0,3 mm pakartojamumą – šios paklaidos priklauso nuo eigo ilgio (tipinis 0,1–0,21 TP3T eigos ilgis), slėgio svyravimais (±10% slėgis sukelia ±0,15 mm padėties pokytį) ir artėjimo kryptimi (dvikryptis pakartojamumas 2–3 kartus blogesnis nei vienkryptis), todėl histerezė tampa ribojančiu veiksniu taikymuose, kuriuose reikalingas didesnis nei ±0,5 mm tikslumas.
Padėties nustatymo paklaidos dydis ir mastelis
Histerezės jėgos ir padėties nustatymo paklaidos santykis atitinka nuspėjamą modelį. Esant tam tikram cilindro skersmeniui ir darbinio slėgio vertei, padėties nustatymo paklaida yra maždaug tiesiogiai proporcinga histerezės jėgai:
Padėties paklaida ≈ (histerezės jėga / pneumatinė jėga) × eigoje ilgis
50 mm skersmens cilindrui esant 8 bar slėgiui (efektyvi jėga ≈ 1570 N) ir 400 mm eiga:
- 40N histerezė: Paklaida ≈ (40/1570) × 400 mm = 10,2 mm potenciali paklaida
- Faktinė slopinimo paklaida: ±0,6–1,0 mm (sistemos slopinimas sumažina teorinę maksimalią vertę)
Tai paaiškina, kodėl didesnio skersmens cilindrai dažnai pasižymi geresniu santykiniu padėties tikslumu – pneumatinė jėga didėja kartu su skersmens plotu (D²), o sandariklio trintis didėja maždaug proporcingai skersmens diametrui (D), todėl gaunamas palankus mastelio santykis.
Dvikryptis ir vienkryptis pakartojamumas
Viena iš svarbiausių preciziško pozicionavimo specifikacijų yra dvikryptis pakartojamumas – gebėjimas grįžti į tą pačią padėtį artėjant iš priešingų pusių. Histerezė tiesiogiai lemia šią specifikaciją:
Vienakryptis pakartojamumas (visada artėjant iš tos pačios pusės):
- Standartinis cilindras: ±0,3–0,6 mm
- Mažos trinties cilindras: ±0,1–0,2 mm
- Bepto tikslumas be strypo: ±0,05–0,15 mm
Dvikryptis pakartojamumas (artėjant iš bet kurios pusės):
- Standartinis cilindras: ±0,8–1,5 mm (2–3 kartus blogiau)
- Mažos trinties cilindras: ±0,2–0,4 mm (2 kartus blogiau)
- Bepto tikslumas be strypo: ±0,1–0,25 mm (1,5–2 kartus blogiau)
Dvikryptis nuokrypis atsiranda dėl histerezės – padėtis priklauso nuo artėjimo krypties dėl trinties asimetrijos. Taikymuose, kuriuose reikalingas dvikryptis tikslumas, turi būti nurodyti cilindrai su minimaliu histerezės koeficientu.
Jautrumas slėgiui ir jėgos pusiausvyra
Padėties nustatymo tikslumas taip pat priklauso nuo slėgio stabilumo. Histerezė sukuria “neaktyvią zoną”, kurioje nedideli slėgio pokyčiai nesukelia judesio, nes jie neviršija statinio trinties. Šios neaktyvios zonos plotis yra:
Neveiksmingo slėgio diapazonas ≈ Atsiskyrimo jėga / Stūmoklio plotas
50 mm skersmens cilindrui (plotas ≈ 1963 mm²) su 25 N atitrūkimo jėga:
Neveikimo diapazonas ≈ 25 N / 1963 mm² = 0,013 MPa = 0,13 bar
Tai reiškia, kad slėgio svyravimai, mažesni nei 0,13 bar, nesukels judesio – cilindras “įstrigs” savo padėtyje. Tai užtikrina tikslų padėties nustatymą:
- Slėgio reguliavimo reikalavimai: Norint užtikrinti pastovų padėties nustatymą, reikia ±0,05 bar arba geresnio slėgio.
- Rezoliucijos apribojimai: Negalima pasiekti geresnės pozicionavimo skiriamosios gebos nei lygiagreti mirties juosta
- Laiko klausimų sprendimas: Sistema svyruoja neaktyviojoje juostoje, kol stabilizuojasi.
Realios aplinkos taikymo reikalavimai
Skirtingos programos skirtingai toleruoja histerezės sukeltas klaidas:
Didelio tikslumo taikymai (reikalingas ±0,1–0,2 mm):
- Elektronikos surinkimas ir testavimas
- Optinių komponentų padėties nustatymas
- Tikslūs matavimai ir tikrinimas
- Sprendimas: PTFE sandarinimo sistemos, mažos trinties konstrukcijos, uždarosios grandinės valdymas
Vidutinio tikslumo taikmenys (±0,3–0,5 mm priimtina):
- Bendroji asamblėja
- Medžiagų tvarkymas su griežtais leistinais nuokrypiais
- Pakuotė ir ženklinimas
- Sprendimas: Optimizuoti poliuretano sandarikliai, kokybės standartą atitinkantys cilindrai
Mažo tikslumo taikmenys (±1,0 mm+ priimtina):
- Birių medžiagų tvarkymas
- Fiksuojimas ir tvirtinimas
- Bendrasis automatizavimas
- Sprendimas: Standartiniai cilindrai yra tinkami
„Bepto“ padedame klientams pritaikyti cilindrų technologiją prie jų faktinių poreikių. Per dideli tikslumo cilindrų parametrai yra pinigų švaistymas, o per maži parametrai sukelia kokybės problemas ir papildomų darbų išlaidas.
Kokios projektavimo strategijos sumažina sandariklio histerezę be strypo cilindruose?
Norint pasiekti tikslų padėties nustatymą, reikia integruotų projektavimo metodų, kurie spręstų trinties problemą visais lygiais. 🎯
Norint sumažinti sandariklio histerezę, reikia taikyti įvairiapusiškas projektavimo strategijas: optimizuota sandariklio lūpos geometrija su 8–12° kontaktiniu kampu, PTFE arba užpildyto PTFE medžiagos su statiniu/dinaminiu trinties koeficientu mažesniu nei 1,4x, preciziškai šlifuoti cilindro paviršiai (Ra 0,2–0,4 μm), skirti ribiniam tepimui palaikyti, sintetiniai tepalai su tinkamu klampumu (ISO VG 32–68) ir mechaninės konstrukcijos ypatybės, pvz., kreipiamieji vežimėliai ir išankstinio įtempimo reguliavimas – cilindruose be strypo, dvigubo sandariklio konfigūracijos su slėgio balansavimu dar labiau sumažina grynąją trinties jėgą, išlaikydamos sandariklio vientisumą.

Optimizuota sandariklio profilio konstrukcija
„Bepto“ kompanija daug investavo į sandariklių profilių optimizavimą, naudodama baigtinių elementų analizę ir empirinius bandymus. Mūsų tikslūs sandariklių profiliai apima:
Seklios lūpų kampai (8–12° palyginti su standartiniais 20–25°):
- Sumažina kontaktinį slėgį 40–60%
- Išlaiko sandarumą dėl tikslių paviršiaus apdailos reikalavimų
- Reikalingas Ra 0,3–0,5 μm cilindrinis paviršius (palyginti su standartiniu Ra 0,8–1,2 μm).
Daugialypės lūpos konfigūracijos:
- Pirminis sandariklis: slėgio sulaikymas (priimtinas vidutinis trinties lygis)
- Antrinė sandarinė: mažos trinties valytuvas (minimalus kontaktinis slėgis)
- Trečiasis sandariklis: užteršimo pašalinimas (išorinis)
Slėgio balansavimo konstrukcijos:
- Priešingos sandarinimo lūpos su slėgio išlyginimu
- Grynoji trinties jėga sumažinta 30–50%
- Ypač veiksmingas cilindruose be strypų su dvipusiu sandarinimu
Paviršiaus apdaila ir tepimo optimizavimas
Cilindro paviršiaus apdaila turi didelę įtaką ribiniam tepimui ir histerezės reiškiniui. Norėdami pasiekti šiuos tikslus, mes nurodome atlikti tikslią šlifavimo apdailą:
Paviršiaus šiurkštumas: Ra 0,2–0,4 μm (palyginti su standartiniu Ra 0,8–1,2 μm)
Plokščiakalnio šlifavimas4: Sukuria mikro rezervuarus, skirtus tepalui sulaikyti
Kryptinis apdaila: Šlifavimo žymės suderintos su judėjimo kryptimi
Kartu su tinkamu tepalu:
Sintetiniai tepalai (mūsų standartas „Bepto“):
- ISO VG 32-68 klampumo diapazonas
- Puikios ribinės tepimo savybės
- Temperatūrai atsparus veikimas
- Suderinamas su sandarinimo medžiagomis
Taikymo būdas:
- Gamykloje atliktas visų slydimo paviršių išankstinis tepimas
- Periodinio tepimo angos (ilgo eigo be strypo cilindrams)
- Automatinės tepimo sistemos kritinėms taikymoms
Mechaninės konstrukcijos ypatybės
Be pačių sandariklių, mechaninė konstrukcija sumažina histerezės efektus:
Tiksliosios kreipiamosios sistemos:
- Linijiniai rutuliniai guoliai arba ritininiai kreipiamieji
- Atskirti apkrovos atramą nuo pneumatinės jėgos
- Sumažina šoninę apkrovą ant sandariklių (pagrindinis trinties veiksnys)
Vežimo įtempimo reguliavimas:
- Leidžia optimizuoti sandariklio suspaudimą
- Balansuoja sandarumo patikimumą ir trintį
- Reguliuojamas lauke, siekiant kompensuoti nusidėvėjimą
Montavimo tvirtumas:
- Tvirtas montavimas sumažina deformacijos sukeltą sukibimą
- Tinkamas sureguliavimas pašalina šonines apkrovas
- Svarbu ilgų eilių taikymams
Neseniai padėjau Michaelui, mašinų konstruktoriui iš Viskonsino, išspręsti nuolatinę pozicionavimo problemą, susijusią su 2 metrų eigoje be strypo cilindru. Jo cilindrai rodė 2–3 mm pozicionavimo nuokrypį dėl išlinkio sukeltos sandariklio sąvaros. Mes perprojektavome tvirtinimo sistemą su tarpine atrama ir perėjome prie mūsų Bepto tikslumo be strypo cilindrų su optimizuotomis kreipiamosiomis. Jo pozicionavimo paklaida sumažėjo iki ±0,25 mm per visą eigą – tai 10 kartų geresnis rezultatas. 🔧
Uždarojo kontūro valdymo integracija
Siekiant maksimalaus tikslumo, mechaninis optimizavimas turi būti derinamas su pažangiu valdymu:
Grįžtamasis ryšys apie padėtį:
- Linijiniai koderiai (5–10 μm skiriamoji geba)
- magnetostrikciniai jutikliai5 (50–100 μm skiriamoji geba)
- Leidžia kompensuoti histerezės efektus
Trinties kompensavimo algoritmai:
- Modelio pagrįstas trinties įvertinimas
- Prisitaikanti kompensacija dėl nusidėvėjimo ir temperatūros
- Gali sumažinti padėties nustatymo paklaidą dar 40–60%
Slėgio profiliavimas:
- Nuo greičio priklausantis slėgio reguliavimas
- Sumažina perviršį ir nusistovėjimo laiką
- Optimizuoja priartėjimą prie galutinės padėties
„Bepto“ teikia programinės įrangos inžinerijos pagalbą, kad padėtų klientams integruoti mūsų mažos trinties cilindrus į jų valdymo sistemas. Optimizuotas mechaninis dizainas ir pažangus valdymas užtikrina pozicionavimo našumą, kuris prilygsta elektros servo sistemų našumui, tačiau kainuoja tik dalį jų kainos.
Kainos ir našumo kompromisai
Tikslumas turi savo kainą, o svarbiausia yra suderinti technologiją su reikalavimais:
Standartinis cilindras ($150-250):
- ±0,8–1,5 mm pakartojamumas
- Tinka 70% taikymams
- Mažiausia pradinė kaina
Mažos trinties cilindras ($250-400):
- ±0,3–0,6 mm pakartojamumas
- Geriausias kainos ir kokybės santykis
- Mūsų populiariausia „Bepto“ tikslumo parinktis
Ypač tikslus cilindras ($500-800):
- ±0,1–0,25 mm pakartojamumas
- PTFE sandarikliai, tikslūs kreipiamieji, pritaikyti grįžtamajam ryšiui
- Tik kritinėms reikmėms
Sprendimas turėtų būti grindžiamas bendromis nuosavybės išlaidomis, įskaitant atliekas, perdirbimą ir kokybės išlaidas. Gamybos linijoje, kurioje kasdien pagaminama 10 000 dalių, o padėties nustatymo klaidos sukelia 2% atliekas, kurių kaina yra $5 už dalį, kokybės išlaidos yra $1 000 per dieną. $300 priemoka už tikslius cilindrus atsipirks per kelias valandas, o ne mėnesius.
Išvada
Dinaminė sandariklio histerezė yra paslėptas pneumatinės sistemos tikslaus pozicionavimo priešas, sukuriantis trinties sukeltas klaidas, kurių neįmanoma visiškai pašalinti jokiais valdymo reguliavimais. Suprasdami histerezės mechanizmus ir įdiegdami optimizuotus sandariklio dizainus, tinkamas medžiagas ir integruotus mechaninius sprendimus, pozicionavimo tikslumą galima pagerinti 5–10 kartų, palyginti su standartiniais cilindrais. „Bepto“ be strypo cilindrai yra sukuriami remiantis dešimtmečius trukusiais trinties optimizavimo tyrimais, kad būtų užtikrintas tikslus pozicionavimas, atitinkantis griežtus pramonės reikalavimus, tuo pačiu išlaikant pneumatinio valdymo sąnaudų pranašumą ir paprastumą. 🌟
Dažnai užduodami klausimai apie dinaminį sandariklio histerezę
Klausimas: Ar galiu išmatuoti esamų cilindrų sandarumo histerezę, kad nustatytumėte padėties nustatymo problemas?
Taip – atlikite paprastą jėgos ir poslinkio bandymą, lėtai ištempdami ir suspaudžiant cilindrą, matuodami jėgą ir padėtį, nubraižydami rezultatus, kad būtų galima vizualizuoti histerezės kilpą. Kilpos plotis rodo histerezės dydį. „Bepto“ rekomenduoja atlikti šį diagnostinį bandymą prieš nurodant keičiamus cilindrus, nes jis leidžia kiekybiškai įvertinti, ar histerezė iš tiesų yra ribojantis veiksnys, ar dominuoja kitos problemos (slėgio nestabilumas, montavimo problemos).
Klausimas: Kaip sandariklio nusidėvėjimas veikia cilindro eksploatacijos trukmės histerezę?
Paprastai sandariklių nusidėvėjimas iš pradžių (per pirmuosius 100 000–200 000 ciklų) sumažina histerezę, nes sandarikliai “įsivažiuoja” ir sumažėja kontaktinis slėgis, o vėliau histerezė palaipsniui didėja, nes nusidėvėjimas sukuria nereguliarius kontaktinius modelius ir paviršiaus pažeidimus. Gerai suprojektuotos sandarikliai, tokie kaip mūsų „Bepto“ tikslūs profiliai, išlaiko stabilią histerezę 1–2 milijonus ciklų iki ženklaus susidėvėjimo, o standartiniai sandarikliai po 500 000 ciklų gali parodyti 50–100% histerezės padidėjimą.
Klausimas: Ar pneumatinis pozicionavimas su mažu histerezės koeficientu yra palyginamas su elektrinėmis servo sistemomis?
Taikymams, kuriems reikalingas ±0,1–0,3 mm pakartojamumas vidutiniais greičiais (<500 mm/s), optimizuoti pneumatiniai cilindrai su uždarojo kontūro valdymu gali prilygti elektros servo veikimui, o sistemos kaina yra 40–60% mažesnė. Tačiau elektros servo lieka pranašesni taikymams, kuriems reikalingas 1 m/s) arba sudėtingi judesio profiliai. Svarbiausia yra suderinti technologiją su faktiniais reikalavimais, o ne pernelyg sureikšminti elektrinius servovariklius taikymuose, kuriuose pakaktų pneumatinės sistemos.
Klausimas: Ar galiu įdiegti mažo trinties sandariklius į esamus cilindrus, kad sumažintumėte histerezę?
Sandariklio keitimas gali padėti, tačiau tai riboja esamas cilindro paviršiaus apdaila ir griovelių geometrija – mažos trinties sandarikliai, kad veiktų tinkamai, reikalauja Ra 0,3–0,5 μm cilindro apdailos, o standartiniai cilindrai paprastai turi Ra 0,8–1,2 μm. Be to, sandariklio griovelių matmenys turi atitikti optimizuotą sandariklio profilį. Daugeliu atvejų visą cilindrą pakeitus tiksliai suprojektuotu įrenginiu, pvz., mūsų Bepto mažos trinties cilindrais be strypų, gaunamas geresnis našumas ir ekonomiškumas nei bandant modernizuoti esamus cilindrus.
Klausimas: Kaip nurodyti histerezės reikalavimus užsakant tikslumo cilindrus?
Nurodykite dviejų krypčių pakartojamumą, o ne tik “tikslumą” – reikalaukite “±0,3 mm dviejų krypčių pakartojamumo per visą eigą”, o ne neaiškių terminų, pvz., “tikslumas” ar “mažas trinties koeficientas”. Taip pat nurodykite darbo sąlygas (slėgį, greitį, ciklo dažnį, temperatūros diapazoną), nes jos turi įtakos histerezės reiškiniui. „Bepto“ pateikia sertifikuotus bandymų duomenis, kuriuose nurodyta faktinė išmatuota histerezės jėga ir pozicionavimo pakartojamumas mūsų tiksliesiems cilindrams, užtikrinant, kad gausite dokumentais pagrįstą našumą, atitinkantį jūsų taikymo reikalavimus.
-
Sužinokite apie pagrindinius „stick-slip“ reiškinio fizikos principus ir kaip jis prisideda prie trinties sukeliamo nestabilumo mechaninėse sistemose. ↩
-
Išnagrinėkite statinio trinties (sąlyčio) techninį apibrėžimą ir jo poveikį pneumatinio veikimo atitrūkimo jėgai. ↩
-
Gaukite gilesnį supratimą apie Stribeck kreivę ir tai, kaip ji apibrėžia trinties ir tepimo režimų santykį slydimo sandarikliuose. ↩
-
Suprasti, kaip plokščiojo šlifavimo procesas sukuria mikro rezervuarus, kurie optimizuoja tepalų sulaikymą ir sumažina paviršiaus trintį. ↩
-
Atraskite magnetostrikcinių jutiklių veikimo principus ir sužinokite, kodėl jie yra labiausiai tinkami aukštos skiriamosios gebos padėties grįžtamajam ryšiui pramoninėje aplinkoje. ↩
