

Introdução
A sua linha de montagem automatizada está a falhar os alvos de posicionamento em 0,5 mm, e as peças rejeitadas estão a acumular-se. 🎯 Calibrou os sensores de posição três vezes, mas a inconsistência persiste. O culpado oculto não é o seu sistema de controlo, mas sim a histerese dinâmica da vedação, um fenómeno de atrito que cria erros de posicionamento imprevisíveis, custando aos fabricantes milhares em sucata e retrabalho diariamente.
A histerese dinâmica da vedação é o atraso induzido pelo atrito entre a posição comandada e a posição real do cilindro, causado por comportamento stick-slip1, variações na força de separação e atrito dependente da velocidade nos materiais de vedação — essa histerese cria erros de posicionamento de 0,2 a 2,0 mm em cilindros pneumáticos padrão, tornando o projeto da vedação, a seleção de materiais e a otimização da lubrificação críticos para aplicações que exigem repetibilidade superior a ±0,5 mm em sistemas de montagem, teste e medição de precisão.
No mês passado, trabalhei com Kevin, um engenheiro de controlo numa fábrica de montagem de componentes eletrónicos em Illinois, que estava com dificuldades devido à colocação inconsistente de componentes numa aplicação de pick-and-place. Os seus erros de posicionamento variavam entre 0,3 e 0,8 mm, apesar de utilizar codificadores de alta resolução. Após analisar o seu sistema, descobrimos que a histerese da vedação nos seus cilindros padrão era a causa principal. A mudança para os nossos cilindros sem haste de baixa fricção Bepto, com geometria de vedação otimizada, reduziu o seu erro de posicionamento para ±0,15 mm, diminuindo a sua taxa de rejeição em 73%. 📊
Índice
- O que é histerese de vedação dinâmica e por que ela afeta a precisão do posicionamento?
- Como os diferentes designs e materiais das vedações influenciam o comportamento da histerese?
- Quais são os efeitos quantificáveis da histerese da vedação em sistemas de posicionamento de precisão?
- Quais estratégias de design minimizam a histerese da vedação em cilindros sem haste?
O que é histerese de vedação dinâmica e por que ela afeta a precisão do posicionamento?
Compreender a física dos erros de posicionamento induzidos pelo atrito é essencial para alcançar precisão em sistemas automatizados. 🔬
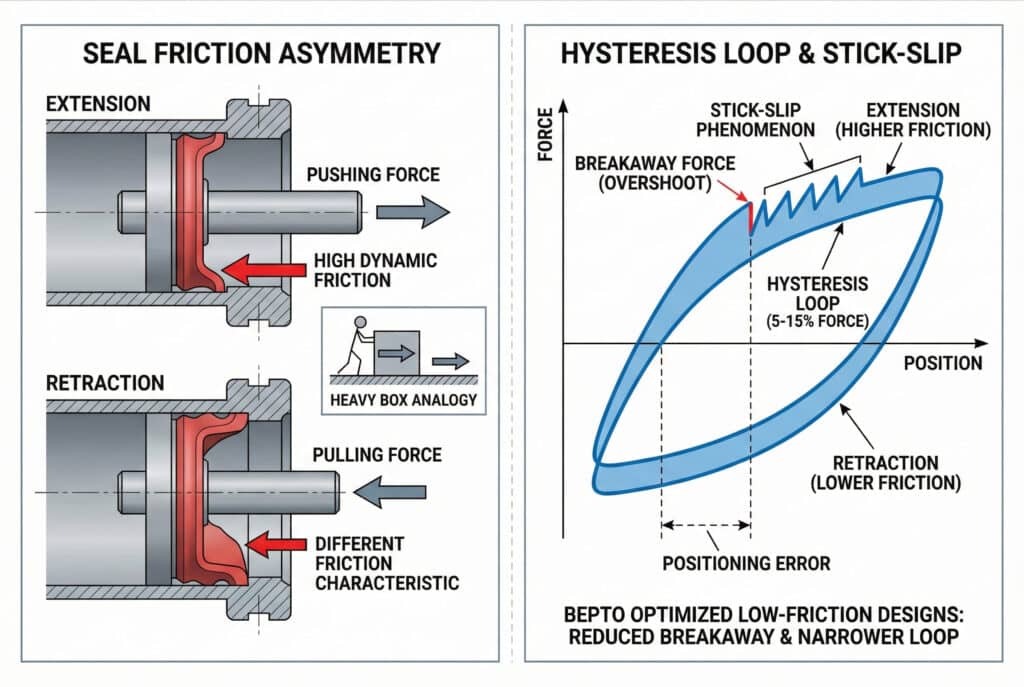
A histerese da vedação dinâmica ocorre quando as forças de atrito variam de forma não linear com a velocidade e a direção, criando um atraso entre a pressão de entrada e a posição de saída— a largura do ciclo de histerese (diferença entre as curvas de força-deslocamento de extensão e retração) mede normalmente 5-15% da força total do curso em cilindros padrão, causando erros dependentes da posição que se agravam em sistemas de circuito fechado e impedem a obtenção de repetibilidade submilimétrica sem algoritmos de compensação ou designs de vedação de baixo atrito.
A mecânica da histerese do atrito da vedação
Pense na histerese da vedação como a diferença entre empurrar uma caixa pesada pelo chão e puxá-la de volta. O atrito não é o mesmo nas duas direções devido às interações da superfície, à deformação do material e aos efeitos direcionais. Nas vedações pneumáticas, essa assimetria é ainda mais pronunciada.
Quando um cilindro se estende, o lábio da vedação é comprimido contra o cilindro numa direção. Quando se retrai, a vedação deforma-se de forma diferente, criando características de atrito diferentes. Isto cria um ciclo de histerese — uma representação gráfica que mostra que a força necessária para mover o cilindro depende não apenas da posição, mas também da direção e do histórico de velocidade.
Fenómeno de deslizamento irregular e forças de separação
O aspecto mais problemático da histerese das vedações é o comportamento stick-slip. Em repouso, as vedações desenvolvem sticção2 Isso é 20-50% superior ao atrito dinâmico durante o movimento. Quando a pressão aumenta para superar essa força de ruptura, o cilindro “salta” repentinamente para a frente, ultrapassando a posição alvo.
Este efeito stick-slip cria um perfil de movimento em dente de serra, em vez de um movimento suave. No posicionamento de precisão, isto manifesta-se como:
- Ultrapassagem ao arrancar do repouso
- Acalmar as oscilações em torno da posição alvo
- Erros de posicionamento dependentes da direção (posições finais diferentes quando se aproxima de direções opostas)
Na Bepto, medimos forças de separação em cilindros padrão que variam de 15 a 35 N para um cilindro de 40 mm de diâmetro interno, enquanto nossos projetos otimizados de baixo atrito reduzem esse valor para 5 a 12 N — uma redução de 60 a 701 TP3T que melhora drasticamente a consistência do posicionamento.
Por que os sistemas de controlo não conseguem compensar totalmente
Muitos engenheiros assumem que o controlo de posição em circuito fechado com feedback pode eliminar os efeitos de histerese. Embora o feedback ajude, ele não consegue superar completamente a física fundamental. O sistema de controlo detecta o erro de posição e aplica a correção, mas a histerese cria:
Zonas mortas: Pequenos erros de posição que não geram força suficiente para superar a fricção estática
Ciclos limite: Oscilações em torno do alvo à medida que o sistema alterna entre superar e liberar o atrito.
Erros dependentes da velocidade: Diferente precisão de posicionamento em diferentes velocidades de aproximação
Já prestei consultoria em dezenas de projetos em que os engenheiros passaram meses ajustando controladores PID, apenas para descobrir que a limitação fundamental era a histerese de atrito da vedação, que nenhum ajuste de software poderia eliminar. A solução requer abordar a fonte mecânica — as próprias vedações.
Como os diferentes designs e materiais das vedações influenciam o comportamento da histerese?
A geometria da vedação e as propriedades do material determinam fundamentalmente a magnitude da histerese e o desempenho do posicionamento. ⚙️
A histerese da vedação varia drasticamente de acordo com o design: vedações em U com ângulos de lábio agressivos criam uma força de histerese de 40-60 N em cilindros de 50 mm de diâmetro interno, enquanto designs otimizados de baixo atrito com ângulos de lábio rasos e materiais de PTFE reduzem a histerese para 10-20 N— a seleção do material (poliuretano vs. PTFE vs. borracha) afeta tanto a relação de atrito estático-dinâmico (1,3-2,0x) quanto o comportamento de atrito dependente da velocidade, com o PTFE oferecendo as características de atrito mais consistentes em todas as faixas de velocidade para aplicações de posicionamento de precisão.
Geometria da vedação e distribuição da pressão de contacto
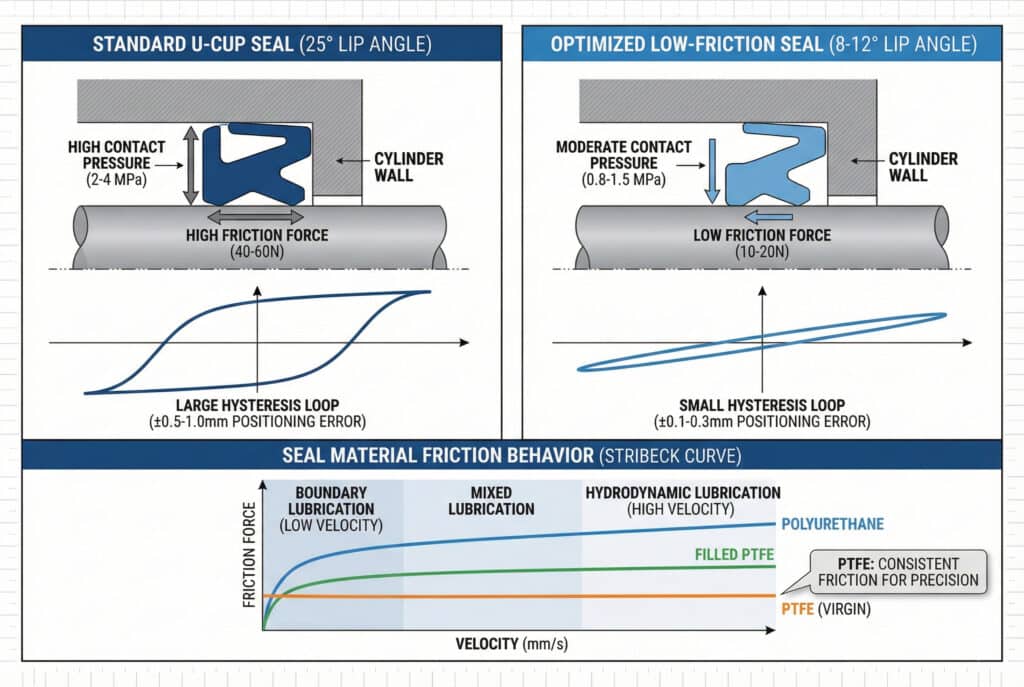
O ângulo do lábio da vedação e a largura de contacto determinam diretamente a força de atrito e a magnitude da histerese. As vedações tradicionais em U utilizam ângulos de lábio de 15-25° para garantir uma vedação fiável, mas isso cria alta pressão de contacto e atrito.
Vedante padrão em U (ângulo do lábio de 25°):
- Alta pressão de contacto (2-4 MPa)
- Excelente confiabilidade de vedação
- Força de atrito elevada (40-60 N para furo de 50 mm)
- Grande loop de histerese (erro de posicionamento de ±0,5-1,0 mm)
Vedação otimizada de baixo atrito (ângulo do lábio de 8-12°):
- Pressão de contacto moderada (0,8-1,5 MPa)
- Boa vedação com acabamento adequado da superfície
- Baixa força de atrito (10-20 N para furo de 50 mm)
- Pequeno ciclo de histerese (erro de posicionamento de ±0,1-0,3 mm)
Na Bepto, desenvolvemos perfis de vedação exclusivos que equilibram a confiabilidade da vedação com o mínimo de atrito. Os nossos cilindros sem haste utilizam designs com vários lábios, nos quais a vedação primária lida com a contenção da pressão, enquanto os elementos secundários de baixo atrito minimizam a histerese.
Efeitos das propriedades dos materiais no comportamento de atrito
Diferentes materiais de vedação apresentam características de atrito e comportamento de histerese muito diferentes:
| Material do selo | Relação de atrito estático/dinâmico | Sensibilidade à velocidade | Força de histerese (diâmetro interno de 50 mm) | Melhor aplicação |
|---|---|---|---|---|
| NBR (Nitrilo) | 1,8-2,0x | Elevado | 45-65N | Baixo custo, sem precisão |
| Poliuretano | 1,5-1,8x | Moderado | 30-50 N | Indústria geral |
| PTFE (virgem) | 1,2-1,4x | Baixa | 8-15N | Posicionamento de precisão |
| PTFE preenchido | 1,3-1,5x | Baixa | 12-20N | Desempenho equilibrado |
| PU com enchimento de grafite | 1,4-1,6x | Moderado-Baixo | 20-35N | Precisão económica |
A estrutura molecular do PTFE cria um atrito notavelmente consistente em todas as faixas de velocidade. Ao contrário dos elastómeros, que apresentam um forte atrito dependente da velocidade (o atrito aumenta com a velocidade), o PTFE mantém um atrito quase constante de 1 mm/s a 1000 mm/s — fundamental para um posicionamento previsível.
A Curva de Stribeck e os Regimes de Lubrificação
O comportamento de atrito da vedação segue o Curva de Stribeck3, que descreve três regimes de lubrificação:
Lubrificação de fronteira (velocidade muito baixa):
- Contato metal-metal através de película lubrificante
- Maior atrito
- Dominante em velocidades de posicionamento (<10 mm/s)
Lubrificação mista (velocidade moderada):
- Suporte parcial da película lubrificante
- Comportamento de atrito transitório
- A maioria das aplicações de posicionamento opera aqui
Lubrificação hidrodinâmica (alta velocidade):
- Separação total da película lubrificante
- Atrito mais baixo
- Raramente alcançado em cilindros pneumáticos
A largura do regime de lubrificação limite determina a histerese de posicionamento. Materiais com melhores propriedades de lubrificação limite (PTFE, compostos com enchimento de grafite) mantêm um atrito mais baixo em velocidades de posicionamento, reduzindo a histerese.
Efeitos da temperatura na histerese
O atrito da vedação não é constante com a temperatura — ele muda significativamente à medida que os sistemas aquecem durante a operação. As vedações padrão de poliuretano apresentam uma redução de atrito de 30-40% de 20 °C a 60 °C, criando um desvio de posicionamento à medida que a temperatura do sistema se estabiliza.
Trabalhei com Sarah, uma engenheira de equipamentos de teste em Michigan, cujo sistema de medição de precisão apresentava diferentes graus de precisão de posicionamento pela manhã e à tarde. As vedações padrão dos cilindros eram sensíveis à temperatura, causando uma variação de posicionamento de 0,4 mm à medida que o sistema aquecia. Substituímos essas vedações por cilindros Bepto com vedações de PTFE, que são estáveis à temperatura, e a consistência do posicionamento melhorou para ±0,12 mm, independentemente da temperatura de operação. 🌡️
Quais são os efeitos quantificáveis da histerese da vedação em sistemas de posicionamento de precisão?
Compreender o impacto numérico da histerese ajuda a especificar a tecnologia de cilindros adequada para os seus requisitos de precisão. 📈
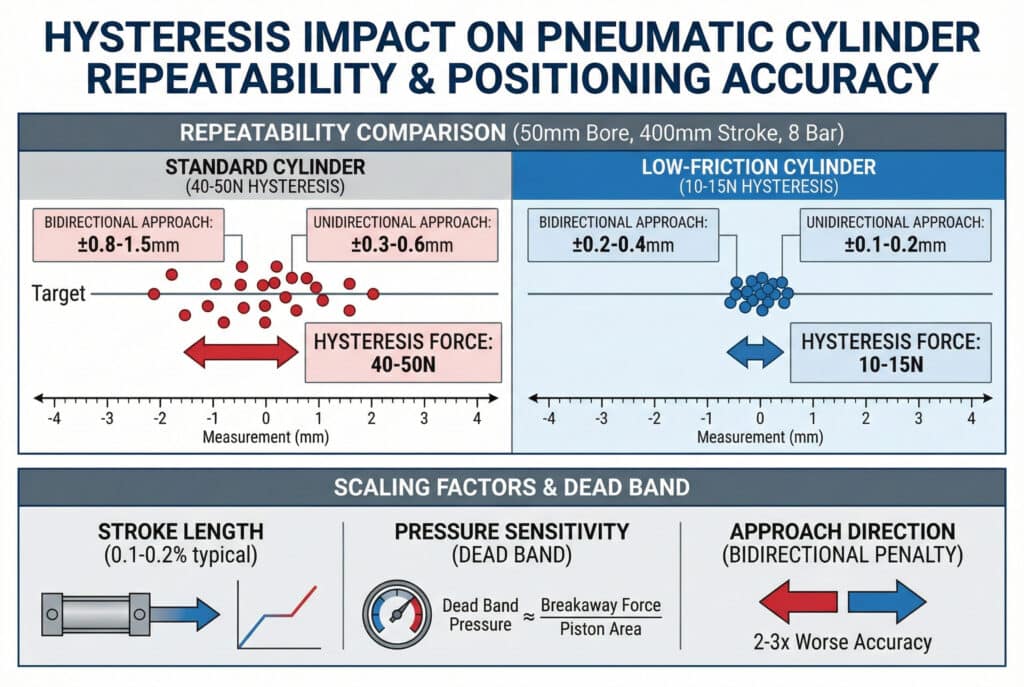
A histerese da vedação cria erros de posicionamento quantificáveis: cilindros padrão com força de histerese de 40-50 N apresentam repetibilidade de ±0,5-1,2 mm a uma pressão de 8 bar, enquanto projetos de baixo atrito com histerese de 10-15 N alcançam repetibilidade de ±0,1-0,3 mm — esses erros variam de acordo com o comprimento do curso (0,1-0,21 TP3T de curso típico), às variações de pressão (±10% de pressão cria uma alteração de posição de ±0,15 mm) e à direção de aproximação (repetibilidade bidirecional 2-3 vezes pior do que unidirecional), tornando a histerese o fator limitante em aplicações que exigem uma precisão superior a ±0,5 mm.
Magnitude e escala do erro de posicionamento
A relação entre a força de histerese e o erro de posicionamento segue um padrão previsível. Para um determinado diâmetro interno do cilindro e pressão de operação, o erro de posicionamento varia aproximadamente de forma linear com a força de histerese:
Erro de posição ≈ (força de histerese / força pneumática) × comprimento do curso
Para um cilindro com diâmetro interno de 50 mm a 8 bar (força efetiva ≈ 1570 N) com curso de 400 mm:
- Histerese de 40 N: Erro ≈ (40/1570) × 400 mm = 10,2 mm de erro potencial
- Erro real com amortecimento: ±0,6-1,0 mm (o amortecimento do sistema reduz o máximo teórico)
Isso explica por que cilindros com diâmetro interno maior costumam apresentar melhor precisão de posicionamento relativo — a força pneumática aumenta com a área do diâmetro interno (D²), enquanto o atrito da vedação aumenta aproximadamente com o diâmetro interno (D), proporcionando uma relação de escala favorável.
Repetibilidade bidirecional vs. unidirecional
Uma das especificações mais importantes para o posicionamento de precisão é a repetibilidade bidirecional — a capacidade de retornar à mesma posição ao se aproximar de direções opostas. A histerese determina diretamente essa especificação:
Repetibilidade unidirecional (sempre aproximando-se da mesma direção):
- Cilindro padrão: ±0,3-0,6 mm
- Cilindro de baixo atrito: ±0,1-0,2 mm
- Precisão sem haste Bepto: ±0,05-0,15 mm
Repetibilidade bidirecional (aproximando-se de qualquer direção):
- Cilindro padrão: ±0,8-1,5 mm (2-3 vezes pior)
- Cilindro de baixo atrito: ±0,2-0,4 mm (2x pior)
- Precisão sem haste Bepto: ±0,1-0,25 mm (1,5-2x pior)
A penalidade bidirecional vem diretamente da histerese — a posição depende da direção de aproximação devido à assimetria do atrito. As aplicações que exigem precisão bidirecional devem especificar cilindros com histerese mínima.
Sensibilidade à pressão e equilíbrio de força
A precisão do posicionamento também depende da estabilidade da pressão. A histerese cria uma “faixa morta” onde pequenas alterações de pressão não produzem movimento porque não superam o atrito estático. A largura dessa faixa morta é:
Pressão da banda morta ≈ Força de ruptura / Área do pistão
Para um cilindro com diâmetro interno de 50 mm (área ≈ 1963 mm²) com força de ruptura de 25 N:
Faixa morta ≈ 25 N / 1963 mm² = 0,013 MPa = 0,13 bar
Isso significa que variações de pressão abaixo de 0,13 bar não produzirão movimento — o cilindro “fica preso” na posição. Para um posicionamento preciso, isso cria:
- Requisitos de regulação da pressão: Necessita de ±0,05 bar ou melhor para um posicionamento consistente
- Limitações de resolução: Não é possível obter uma resolução de posicionamento melhor do que a equivalente à banda morta
- Resolução de problemas de tempo: O sistema oscila dentro da banda morta antes de estabilizar
Requisitos de aplicação no mundo real
Diferentes aplicações têm diferentes tolerâncias para erros induzidos por histerese:
Aplicações de alta precisão (±0,1-0,2 mm necessário):
- Montagem e teste de componentes eletrónicos
- Posicionamento de componentes óticos
- Medição e inspeção de precisão
- Solução: Sistemas de vedação em PTFE, designs de baixo atrito, controlo de circuito fechado
Aplicações de média precisão (±0,3-0,5 mm aceitável):
- Operações da assembleia geral
- Manuseamento de materiais com tolerâncias rigorosas
- Embalagem e rotulagem
- Solução: Vedações de poliuretano otimizadas, cilindros com padrão de qualidade
Aplicações de baixa precisão (±1,0 mm+ aceitável):
- Manuseamento de materiais a granel
- Fixação e montagem
- Automatização geral
- Solução: Cilindros padrão adequados
Na Bepto, ajudamos os clientes a adequar a tecnologia dos cilindros às suas necessidades reais. Especificar cilindros de precisão com características excessivas desperdiça dinheiro, enquanto especificar cilindros com características insuficientes causa problemas de qualidade e custos de retrabalho.
Quais estratégias de design minimizam a histerese da vedação em cilindros sem haste?
Alcançar um posicionamento preciso requer abordagens de design integradas que abordem o atrito em todos os níveis. 🎯
Minimizar a histerese da vedação requer estratégias de design multifacetadas: geometria otimizada do lábio da vedação com ângulos de contacto de 8-12°, materiais PTFE ou PTFE preenchido com índices de atrito estático/dinâmico abaixo de 1,4x, superfícies de cilindro com acabamento de precisão (Ra 0,2-0,4 μm) para suportar a lubrificação de contorno, lubrificantes sintéticos com viscosidade adequada (ISO VG 32-68) e características de projeto mecânico, como carros guiados e ajuste de pré-carga — em cilindros sem haste, configurações de vedação dupla com equilíbrio de pressão reduzem ainda mais a força de atrito líquida, mantendo a integridade da vedação.

Engenharia de perfil de vedação otimizada
Na Bepto, investimos fortemente na otimização do perfil das vedações utilizando análise de elementos finitos e testes empíricos. Os nossos perfis de vedação de precisão incorporam:
Ângulos labiais rasos (8-12° vs. padrão 20-25°):
- Reduz a pressão de contacto em 40-60%
- Mantém a vedação através de requisitos precisos de acabamento superficial
- Requer acabamento cilíndrico Ra 0,3-0,5 μm (em comparação com Ra 0,8-1,2 μm para o padrão)
Configurações com vários lábios:
- Vedação primária: Contenção de pressão (atrito moderado aceitável)
- Vedação secundária: Raspador de baixo atrito (pressão de contacto mínima)
- Vedação terciária: exclusão de contaminação (externa)
Projetos com equilíbrio de pressão:
- Lábios de vedação opostos com equalização de pressão
- Força de atrito líquida reduzida em 30-50%
- Particularmente eficaz em cilindros sem haste com vedação dupla
Otimização do acabamento superficial e lubrificação
O acabamento da superfície do cilindro afeta significativamente a lubrificação limite e a histerese. Especificamos um honing de precisão para obter:
Rugosidade da superfície: Ra 0,2-0,4 μm (vs. padrão Ra 0,8-1,2 μm)
Afiação de planícies4: Cria micro-reservatórios para retenção de lubrificante
Acabamento direcional: Marcas de afiação alinhadas com a direção do movimento
Combinado com lubrificação adequada:
Lubrificantes sintéticos (nosso padrão na Bepto):
- Intervalo de viscosidade ISO VG 32-68
- Excelentes propriedades de lubrificação de limites
- Desempenho estável em relação à temperatura
- Compatível com materiais de vedação
Método de aplicação:
- Pré-lubrificação de fábrica de todas as superfícies deslizantes
- Portas de relubrificação periódica (para cilindros sem haste de curso longo)
- Sistemas de lubrificação automática para aplicações críticas
Características do projeto mecânico
Além das próprias vedações, o design mecânico reduz os efeitos de histerese:
Sistemas de guias de precisão:
- Rolamentos lineares de esferas ou guias de rolos
- Suporte de carga separado da força pneumática
- Reduz a carga lateral nas vedações (principal contribuinte para o atrito)
Ajuste da pré-carga do carro:
- Permite a otimização da compressão da vedação
- Equilibra a fiabilidade da vedação e o atrito
- Ajustável no local para compensação do desgaste
Rigidez de montagem:
- A montagem rígida reduz o encravamento induzido pela deflexão
- O alinhamento adequado elimina cargas laterais
- Fundamental para aplicações de curso longo
Recentemente, ajudei Michael, um fabricante de máquinas em Wisconsin, a resolver um problema persistente de posicionamento numa aplicação de cilindro sem haste com curso de 2 metros. Os seus cilindros apresentavam uma variação de posicionamento de 2 a 3 mm devido ao encravamento da vedação induzido pela deflexão. Redesenhamos o sistema de montagem com suporte intermediário e mudamos para os nossos cilindros sem haste de precisão Bepto com guias otimizadas. O seu erro de posicionamento caiu para ±0,25 mm em todo o curso — uma melhoria de 10 vezes. 🔧
Integração do controlo de circuito fechado
Para obter a máxima precisão, a otimização mecânica deve ser combinada com um controlo inteligente:
Feedback da posição:
- Codificadores lineares (resolução de 5-10 μm)
- sensores magnetostrictivos5 (resolução de 50-100 μm)
- Permite compensar os efeitos de histerese
Algoritmos de compensação de atrito:
- Estimativa de atrito baseada em modelo
- Compensação adaptativa para desgaste e temperatura
- Pode reduzir o erro de posicionamento em 40-60% adicionais
Perfil de pressão:
- Ajuste de pressão dependente da velocidade
- Reduz o overshoot e o tempo de estabilização
- Otimiza a abordagem à posição final
Na Bepto, oferecemos suporte de engenharia de aplicação para ajudar os clientes a integrar os nossos cilindros de baixo atrito aos seus sistemas de controlo. A combinação de design mecânico otimizado e controlo inteligente proporciona um desempenho de posicionamento que se aproxima dos sistemas servoelétricos por uma fração do custo.
Compromissos entre custo e desempenho
A precisão tem um custo, e o segredo está em adequar a tecnologia às necessidades:
Cilindro standard ($150-250):
- Repetibilidade de ±0,8-1,5 mm
- Adequado para aplicações 70%
- Custo inicial mais baixo
Cilindro de baixo atrito ($250-400):
- Repetibilidade de ±0,3-0,6 mm
- Melhor relação custo-benefício
- A nossa opção de precisão Bepto mais popular
Cilindro de ultraprecisão ($500-800):
- Repetibilidade de ±0,1-0,25 mm
- Vedações em PTFE, guias de precisão, prontas para feedback
- Apenas para aplicações críticas
A decisão deve basear-se no custo total de propriedade, incluindo sucata, retrabalho e custos de qualidade. Para uma linha de produção que produz 10.000 peças por dia, onde erros de posicionamento causam 2% de sucata a $5/peça, o custo de qualidade é de $1.000/dia. Um prémio de $300 para cilindros de precisão é recuperado em horas, não em meses.
Conclusão
A histerese dinâmica da vedação é o inimigo oculto do posicionamento preciso em sistemas pneumáticos, criando erros induzidos por atrito que nenhum ajuste de controlo consegue eliminar totalmente. Ao compreender os mecanismos de histerese e implementar projetos de vedação otimizados, materiais adequados e soluções mecânicas integradas, a precisão do posicionamento pode melhorar de 5 a 10 vezes em comparação com cilindros padrão. Na Bepto, os nossos cilindros sem haste incorporam décadas de pesquisa em otimização de atrito para oferecer desempenho de posicionamento de precisão que atende aos exigentes requisitos industriais, mantendo as vantagens de custo e a simplicidade da atuação pneumática. 🌟
Perguntas frequentes sobre a histerese da vedação dinâmica
P: Posso medir a histerese da vedação nos meus cilindros existentes para diagnosticar problemas de posicionamento?
Sim — realize um teste simples de força-deslocamento, estendendo e retraindo lentamente o cilindro enquanto mede a força e a posição, plotando os resultados para visualizar o ciclo de histerese. A largura do ciclo indica a magnitude da histerese. Na Bepto, recomendamos este teste de diagnóstico antes de especificar cilindros de substituição, pois ele quantifica se a histerese é realmente o seu fator limitante ou se outras questões (instabilidade de pressão, problemas de montagem) são dominantes.
P: Como o desgaste da vedação afeta a histerese ao longo da vida útil do cilindro?
O desgaste das vedações normalmente reduz a histerese inicialmente (primeiros 100.000-200.000 ciclos) à medida que as vedações se “amaciam” e a pressão de contacto diminui, depois a histerese aumenta gradualmente à medida que o desgaste cria padrões de contacto irregulares e danos na superfície. Vedações bem projetadas, como nossos perfis de precisão Bepto, mantêm a histerese estável por 1 a 2 milhões de ciclos antes de uma degradação significativa, enquanto as vedações padrão podem apresentar um aumento de histerese de 50 a 100% após 500.000 ciclos.
P: O posicionamento pneumático com baixa histerese é comparável aos sistemas servoelétricos?
Para aplicações que exigem repetibilidade de ±0,1-0,3 mm a velocidades moderadas (<500 mm/s), cilindros pneumáticos otimizados com controlo de circuito fechado podem igualar o desempenho dos servos elétricos com um custo de sistema 40-60% mais baixo. No entanto, os servos elétricos continuam a ser superiores para aplicações que exigem precisão 1 m/s) ou perfis de movimento complexos. O segredo é adequar a tecnologia às necessidades reais, em vez de especificar servos elétricos excessivos para aplicações em que os pneumáticos seriam suficientes.
P: Posso adaptar vedações de baixo atrito aos meus cilindros existentes para reduzir a histerese?
A substituição da vedação pode ajudar, mas é limitada pelo acabamento da superfície do cilindro e pela geometria da ranhura existentes — as vedações de baixa fricção requerem um acabamento do cilindro de Ra 0,3-0,5 μm para funcionar corretamente, enquanto os cilindros padrão normalmente têm Ra 0,8-1,2 μm. Além disso, as dimensões da ranhura da vedação devem corresponder ao perfil otimizado da vedação. Na maioria dos casos, substituir todo o cilindro por uma unidade projetada com precisão, como os nossos cilindros sem haste de baixo atrito Bepto, proporciona melhor desempenho e relação custo-benefício do que tentar fazer retrofits.
P: Como posso especificar os requisitos de histerese ao encomendar cilindros de precisão?
Especifique a repetibilidade bidirecional em vez de apenas “precisão” — solicite “±0,3 mm de repetibilidade bidirecional em todo o curso” em vez de termos vagos como “precisão” ou “baixo atrito”. Especifique também as condições de funcionamento (pressão, velocidade, taxa de ciclo, intervalo de temperatura), pois estas afetam a histerese. Na Bepto, fornecemos dados de testes certificados que mostram a força de histerese real medida e a repetibilidade de posicionamento dos nossos cilindros de precisão, garantindo que você receba um desempenho documentado que atenda aos requisitos da sua aplicação.
-
Aprenda sobre a física subjacente ao fenómeno stick-slip e como ele contribui para a instabilidade induzida pelo atrito em sistemas mecânicos. ↩
-
Explore a definição técnica de atrito estático (aderência) e o seu impacto na força de ruptura necessária para a atuação pneumática. ↩
-
Obtenha uma compreensão mais profunda da curva de Stribeck e como ela define a relação entre os regimes de atrito e lubrificação em vedações deslizantes. ↩
-
Compreenda como o processo de afiação de planalto cria micro-reservatórios que otimizam a retenção de lubrificante e reduzem o atrito superficial. ↩
-
Descubra os princípios de funcionamento dos sensores magnetostritivos e por que eles são preferidos para feedback de posição de alta resolução em ambientes industriais. ↩
