

Histerese1 é o assassino invisível da precisão que se esconde em todos os sistemas de atuadores proporcionais — destruindo silenciosamente a precisão do posicionamento em até 15%, enquanto os engenheiros culpam tudo, exceto o verdadeiro culpado. Esse fenómeno faz com que os atuadores “lembrem” suas posições anteriores, criando zonas mortas imprevisíveis que transformam o controle suave em uma inconsistência frustrante. 😠
A histerese no controlo do atuador proporcional cria erros de posicionamento de 2-15% do curso total devido à folga mecânica, atrito da vedação, efeitos magnéticos e bandas mortas da válvula de controlo, exigindo compensação por meio de algoritmos de software, pré-carregamento mecânico, feedback de alta resolução e seleção adequada de componentes para atingir uma precisão de posicionamento inferior a 1%.
Há dois meses, trabalhei com a Jennifer, uma engenheira de controlo numa fábrica aeroespacial em Seattle, cujos robôs de montagem de precisão estavam a falhar os alvos em 3 mm de forma consistente — não aleatoriamente, mas num padrão previsível que indicava histerese. Após implementar as nossas soluções anti-histerese Bepto, os erros de posicionamento diminuíram para menos de 0,5 mm. ✈️
Índice
- O que é exatamente a histerese e por que ocorre em atuadores proporcionais?
- Como a histerese afeta diferentes tipos de sistemas de controlo proporcional?
- Quais técnicas de medição melhor identificam e quantificam os efeitos de histerese?
- Quais são os métodos mais eficazes para minimizar a histerese no seu sistema?
O que é exatamente a histerese e por que ocorre em atuadores proporcionais?
Compreender os mecanismos de histerese é essencial para obter um controlo proporcional preciso em sistemas de atuadores pneumáticos e hidráulicos.
A histerese ocorre quando a posição de saída do atuador depende tanto do comando de entrada atual quanto do histórico de posições anteriores, criando caminhos de resposta diferentes para comandos de aumento e diminuição devido à folga mecânica, forças de atrito, efeitos magnéticos e bandas mortas da válvula de controlo que se acumulam ao longo do circuito de controlo.
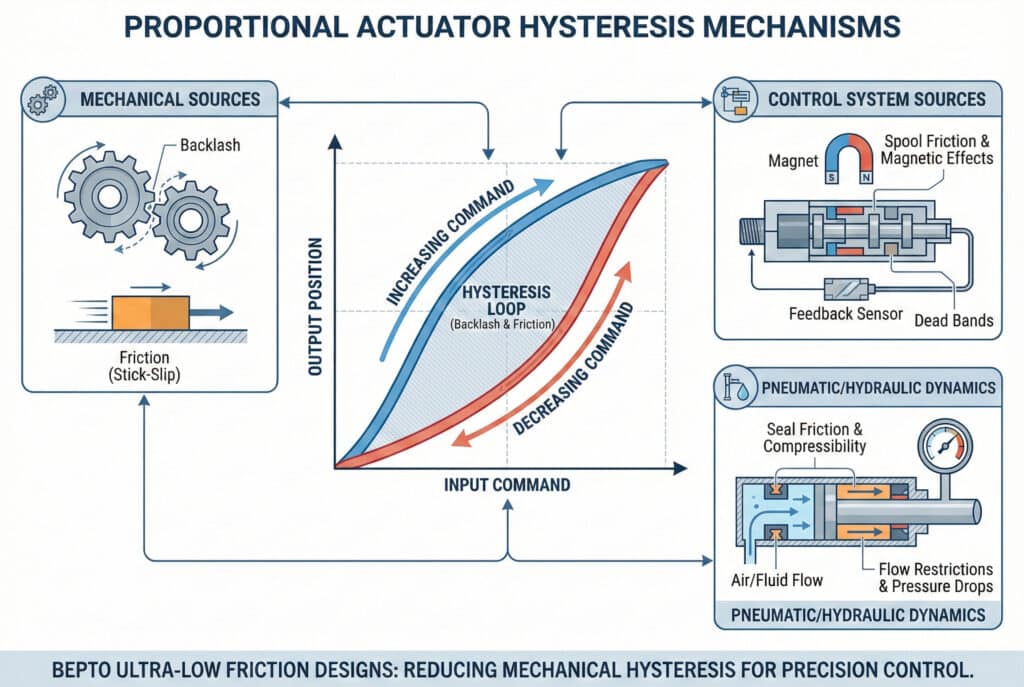
Mecanismos fundamentais de histerese
Fontes mecânicas
Os componentes físicos contribuem significativamente para a histerese do sistema:
- Reação adversa2: Os conjuntos de engrenagens, acoplamentos e conexões criam zonas mortas
- Atrito: As diferenças entre atrito estático e cinético causam o comportamento stick-slip
- Conformidade: Deformação elástica em ligações mecânicas
- Padrões de desgaste: O desgaste dos componentes cria superfícies de contacto irregulares
Fontes do sistema de controlo
Os elementos de controlo eletrónicos e pneumáticos adicionam histerese:
| Tipo de componente | Histerese típica | Causa primária | Estratégia de atenuação |
|---|---|---|---|
| Servo-válvulas | 0.1-0.5% | Atrito do carretel | Dither de alta frequência |
| Válvulas proporcionais3 | 0.5-2% | Histerese magnética | Compensação de feedback |
| Sensores de posição | 0.05-0.2% | Ruído eletrónico | Filtragem de sinal |
| Amplificadores | 0.1-0.3% | Configurações da banda morta | Ajuste de calibração |
Origens físicas em sistemas pneumáticos
Efeitos da fricção da vedação
As vedações pneumáticas criam fontes significativas de histerese:
- Atrito de ruptura: Maior força necessária para iniciar o movimento
- Atrito de funcionamento: Menor força durante o movimento contínuo
- comportamento stick-slip4: Movimento irregular a baixas velocidades
- Dependência da temperatura: A fricção altera-se com a temperatura de funcionamento
Dinâmica da pressão
Os efeitos da pressão do sistema pneumático contribuem para a histerese:
- Compressibilidade: A compressão do ar cria um comportamento semelhante ao de uma mola
- Restrições de caudal: Restrições nas válvulas e conexões causam atrasos
- Quedas de pressão: As perdas de linha criam forças dependentes da posição
- Efeitos da temperatura: A expansão térmica afeta a rigidez do sistema
Na Bepto, projetamos os nossos cilindros sem haste com vedações de atrito ultrabaixo e sistemas de guia usinados com precisão que reduzem a histerese mecânica em 60% em comparação com os projetos padrão — essencial para aplicações de controlo proporcional de alta precisão. 🎯
Histerese dependente da carga
Efeitos da carga variável
As cargas externas influenciam significativamente as características de histerese:
- Cargas gravitacionais: Variações de força dependentes da posição
- Cargas inerciais: Requisitos de força dependentes da aceleração
- Cargas do processo: Forças externas variáveis durante a operação
- Cargas de atrito: Variações da força de contacto superficial
Interações de carga dinâmica
Cargas em movimento criam padrões complexos de histerese:
- Efeitos de aceleração: Forças inerciais durante mudanças de velocidade
- Acoplamento por vibração: As vibrações externas afetam o posicionamento
- Interações de ressonância: Excitação da frequência natural
- Variações de amortecimento: Características de amortecimento dependentes da carga
Como a histerese afeta diferentes tipos de sistemas de controlo proporcional?
Os efeitos de histerese variam significativamente entre diferentes tecnologias de atuadores e arquiteturas de controlo, exigindo estratégias de compensação personalizadas.
Os sistemas proporcionais de malha aberta apresentam erros de histerese de 5-15% sem capacidade de correção, enquanto os sistemas de malha fechada podem reduzir a histerese para 0,5-2% por meio de compensação de feedback, com sistemas servo avançados atingindo precisão inferior a 0,1% usando codificadores de alta resolução e algoritmos de controle sofisticados.
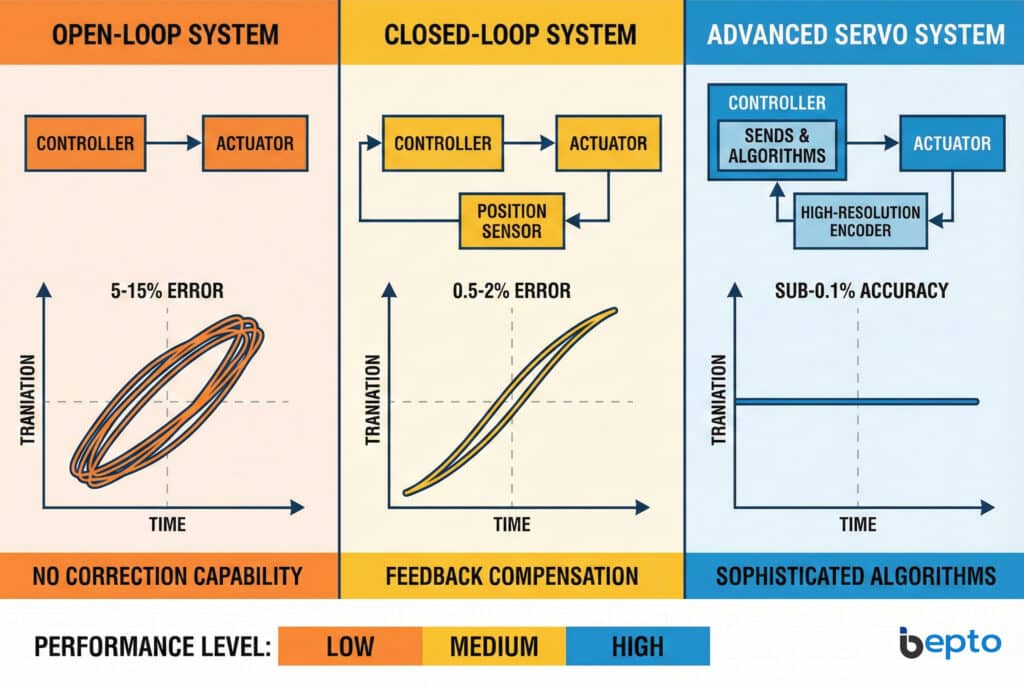
Sistemas de controlo de circuito aberto
Limitações inerentes
Os sistemas de circuito aberto não conseguem compensar os efeitos de histerese:
- Sem correção de feedback: Os erros acumulam-se sem serem detetados
- Padrões previsíveis: A histerese cria erros de posicionamento repetíveis
- Sensibilidade à temperatura: O desempenho varia de acordo com as condições de funcionamento
- Dependência de carga: Cargas diferentes criam padrões de histerese diferentes
Características típicas de desempenho
O desempenho da histerese do sistema de circuito aberto varia de acordo com a aplicação:
| Tipo de aplicação | Gama de histerese | Usos aceitáveis | Limitações de desempenho |
|---|---|---|---|
| Posicionamento simples | 5-15% | Tarefas não críticas | Fraca repetibilidade |
| Controlo da velocidade | 3-8% | Regulação aproximada da velocidade | Desempenho variável |
| Controlo da força | 10-25% | Aplicações básicas da força | Resultado inconsistente |
| Sistemas multieixos | 8-20% | Automação simples | Erros acumulados |
Sistemas de controlo de circuito fechado
Benefícios de compensação por feedback
Os sistemas de circuito fechado podem compensar ativamente a histerese:
- Detecção de erros: Monitorização contínua da posição
- Correção em tempo real: Resposta imediata a erros de posicionamento
- Controlo adaptativo: Os algoritmos de aprendizagem melhoram o desempenho
- Rejeição de perturbações: Compensação de força externa
Eficácia do algoritmo de controlo
Diferentes estratégias de controlo lidam com a histerese com sucesso variável:
- Controlo PID5: Compensação básica, histerese residual 2-5%
- Controlo de avanço: Compensação preditiva, residual 1-3%
- Controlo adaptativo: Compensação de aprendizagem, 0,5-2% residual
- Controlo baseado em modelo: Compensação teórica, 0,1-1% residual
Sistemas de controlo servo
Técnicas avançadas de remuneração
Os sistemas servo de alto desempenho empregam uma compensação de histerese sofisticada:
- Mapeamento de histerese: Caracterização do sistema e tabelas de compensação
- Técnicas de pré-carregamento: Viés mecânico para eliminar zonas mortas
- Sinais de dither: Excitação de alta frequência para superar o atrito
- Algoritmos preditivos: Previsão de histerese baseada em modelo
Michael, engenheiro de robótica numa fábrica de precisão na Carolina do Norte, implementou as atualizações de controlo servo recomendadas pela nossa empresa na sua linha de montagem. A precisão do posicionamento melhorou de ±2,5 mm para ±0,3 mm, reduzindo os defeitos do produto em 75% e economizando $50.000 mensalmente em custos de retrabalho. 🤖
Desafios do sistema multieixos
Efeitos cumulativos
Vários atuadores agravam os problemas de histerese:
- Acumulação de erros: Erros individuais dos eixos combinados
- Efeitos de acoplamento: As interações entre eixos criam padrões complexos
- Problemas de sincronização: Diferentes padrões de histerese causam problemas de coordenação
- Complexidade da calibração: Vários sistemas requerem ajustes individuais
Estratégias de coordenação
Os sistemas multieixos avançados utilizam técnicas especializadas:
- Controlo mestre-escravo: Um eixo lidera, os outros seguem
- Compensação de acoplamento cruzado: Correção da interação do eixo
- Posicionamento sincronizado: Perfis de movimento coordenados
- Otimização global: Otimização do desempenho em todo o sistema
Quais técnicas de medição melhor identificam e quantificam os efeitos de histerese?
A medição e caracterização precisas da histerese permitem o desenvolvimento de estratégias de compensação eficazes e a otimização do sistema.
A medição da histerese requer testes de posicionamento bidirecionais com encoders de alta resolução, registrando as relações entre posição e comando ao longo de ciclos completos, analisando a largura do loop e os padrões de assimetria e documentando as dependências de temperatura e carga para criar mapas de compensação abrangentes para um desempenho de controlo ideal.
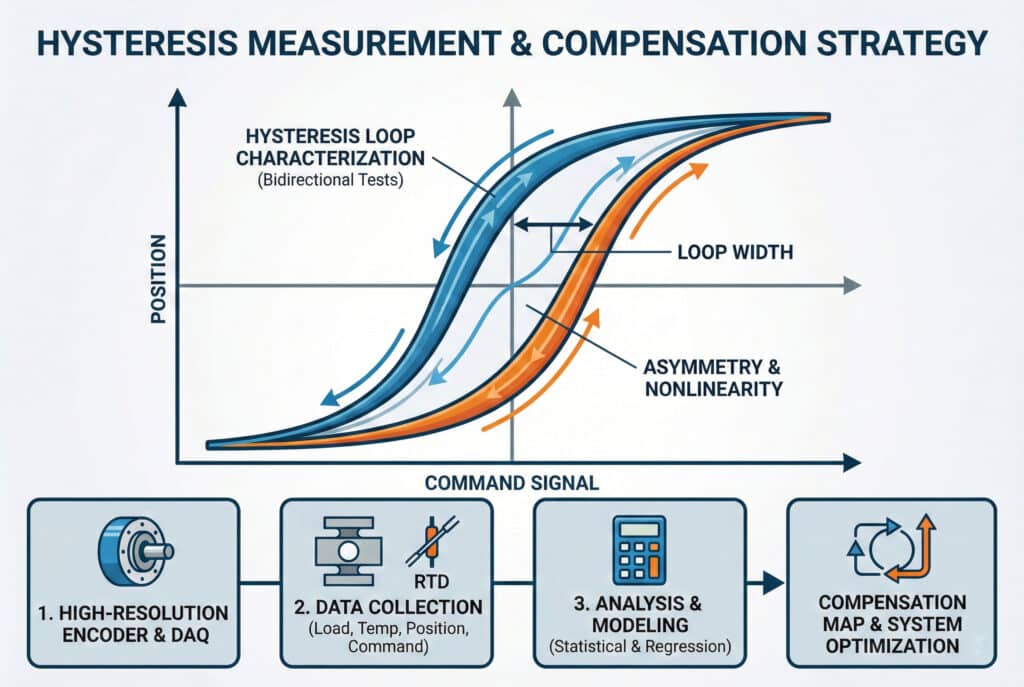
Protocolos de medição padrão
Testes de posicionamento bidirecionais
A caracterização abrangente da histerese requer testes sistemáticos:
- Ciclos completos: Sequências completas de extensão e retração
- Várias velocidades: Vários perfis de velocidade para identificar dependências de taxa
- Variações de carga: Diferentes cargas externas para mapear os efeitos da carga
- Intervalos de temperatura: Avaliação do impacto da temperatura de funcionamento
Requisitos para a recolha de dados
A medição precisa da histerese exige instrumentação de alta qualidade:
| Parâmetro de medição | Resolução necessária | Equipamento típico | Meta de precisão |
|---|---|---|---|
| Feedback da posição | 0,01% de curso | Codificador linear | ±0,005% |
| Sinal de comando | Mínimo de 12 bits | sistema DAQ | ±0,1% |
| Medição de carga | 1% de força nominal | Célula de carga | ±0,5% |
| Temperatura | ±1°C | Sensor RTD | ±0.5°C |
Técnicas de análise
Caracterização do ciclo de histerese
A análise matemática revela características de histerese:
- Largura do laço: Diferença máxima de posição no mesmo comando
- Assimetria: Viés direcional em erros de posicionamento
- Não linearidade: Desvio da resposta linear ideal
- Repetibilidade: Consistência ao longo de vários ciclos
Métodos de análise estatística
Técnicas avançadas de análise quantificam os efeitos de histerese:
- Desvio padrão: Medição da repetibilidade do posicionamento
- Análise de correlação: Força da relação entre entradas e saídas
- Análise de frequência: Características de resposta dinâmica
- Análise de regressão: Desenvolvimento de modelos matemáticos
Sistemas de monitorização em tempo real
Rastreamento contínuo de histerese
Os sistemas de produção beneficiam da monitorização contínua da histerese:
- Sensores incorporados: Sistemas integrados de feedback de posição
- Registo de dados: Registo contínuo do desempenho
- Análise de tendências: Acompanhamento da degradação do desempenho a longo prazo
- Manutenção preditiva: Aviso antecipado de desgaste dos componentes
Os nossos sistemas de diagnóstico Bepto incluem monitorização de histerese em tempo real que alerta os operadores quando os erros de posicionamento excedem os limites de 0,5%, permitindo uma manutenção proativa antes que a precisão se degrade para níveis inaceitáveis. 📊
Avaliação do Impacto Ambiental
Efeitos da temperatura
A temperatura influencia significativamente as características de histerese:
- Expansão térmica: Alterações nas dimensões mecânicas
- Alterações na viscosidade: Variações nas propriedades dos fluidos
- Propriedades do material: Dependência da temperatura do módulo de elasticidade
- Desempenho da vedação: Variações do coeficiente de atrito
Análise de dependência de carga
As cargas externas criam padrões complexos de histerese:
- Cargas estáticas: Efeitos da força constante no posicionamento
- Cargas dinâmicas: Impacto de força variável durante o movimento
- Efeitos de inércia: Erros de posicionamento dependentes da aceleração
- Variações de atrito: Impacto das condições da superfície no desempenho
Quais são os métodos mais eficazes para minimizar a histerese no seu sistema?
A implementação de estratégias abrangentes de redução de histerese pode alcançar uma precisão de posicionamento inferior a 1% em aplicações exigentes de controlo proporcional.
A minimização eficaz da histerese combina melhorias mecânicas, incluindo componentes de baixo atrito e eliminação de folga, aprimoramentos no sistema de controlo com compensação feedforward e algoritmos adaptativos, além de controlos ambientais para estabilidade de temperatura e carga, reduzindo normalmente a histerese de 5-15% para menos de 1% da escala total.
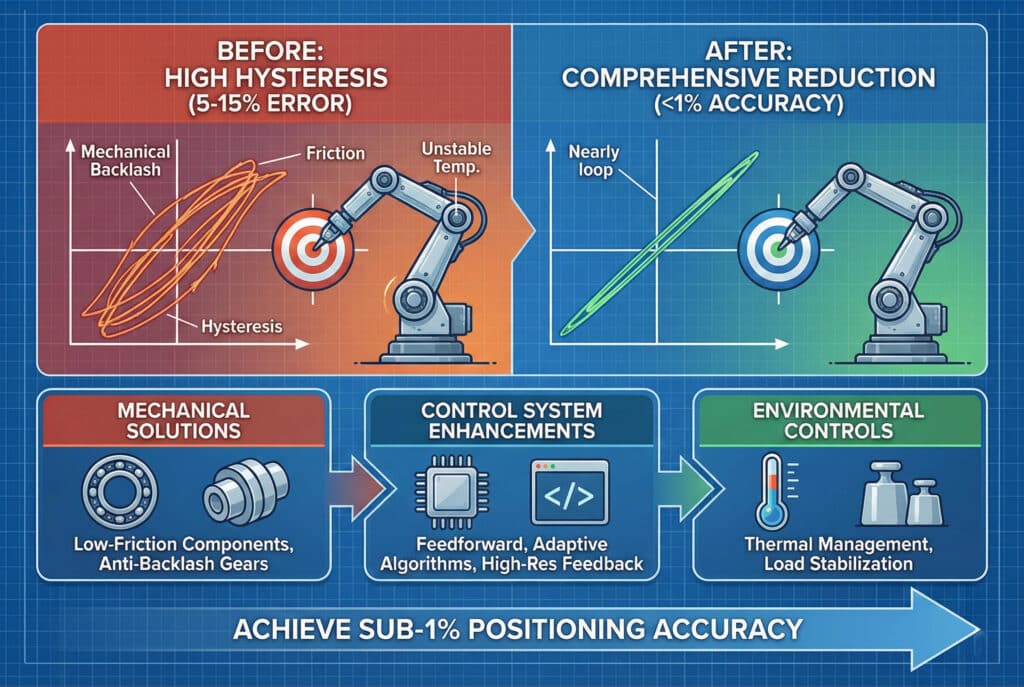
Soluções mecânicas
Seleção e projeto de componentes
Escolha componentes especificamente concebidos para baixa histerese:
- Rolamentos de precisão: Guias lineares de alta qualidade com folga mínima
- Vedantes de baixo atrito: Materiais e designs avançados para vedantes
- Acoplamentos rígidos: Elimine fontes de folga mecânica
- Sistemas pré-carregados: Viés mecânico para eliminar zonas mortas
Melhorias na arquitetura do sistema
Projete sistemas mecânicos para minimizar fontes de histerese:
| Caraterísticas de design | Redução da histerese | Custo de implementação | Impacto da manutenção |
|---|---|---|---|
| Tração direta | 80-90% | Elevado | Baixa |
| Guias pré-carregados | 60-70% | Médio | Médio |
| Acoplamentos de precisão | 40-50% | Baixa | Baixa |
| Engrenagens anti-backlash | 70-80% | Médio | Elevado |
Melhorias no sistema de controlo
Técnicas de compensação de software
Algoritmos de controlo avançados podem reduzir significativamente os efeitos de histerese:
- Mapeamento de histerese: Tabelas de consulta para correção de posição
- Controlo de avanço: Compensação preditiva com base na direção do comando
- Algoritmos adaptativos: Compensação de histerese com autoaprendizagem
- Controlo baseado em modelo: Previsão de histerese baseada na física
Melhorias no sistema de feedback
Os sistemas de feedback aprimorados permitem uma melhor compensação da histerese:
- Codificadores de resolução mais elevada: Maior precisão na medição da posição
- Vários sensores de feedback: Medição redundante da posição
- Feedback de velocidade: Algoritmos de compensação baseados em taxas
- Feedback de força: Compensação de histerese dependente da carga
Estratégias de controlo ambiental
Gestão da temperatura
Temperaturas operacionais estáveis reduzem as variações de histerese:
- Isolamento térmico: Proteja os atuadores contra variações de temperatura
- Arrefecimento ativo: Mantenha temperaturas operacionais consistentes
- Compensação de temperatura: Correção de software para efeitos térmicos
- Pré-condicionamento térmico: Permitir que os sistemas atinjam o equilíbrio térmico
Estabilização da carga
Condições de carga consistentes minimizam as variações de histerese:
- Isolamento de carga: Desacoplar perturbações externas
- Contrabalanço: Reduzir os efeitos da carga gravitacional
- Amortecimento de vibrações: Minimizar as variações dinâmicas de carga
- Otimização de processos: Reduzir as forças externas variáveis
Sarah, engenheira de processos numa fábrica de embalagens farmacêuticas no Colorado, implementou o nosso programa abrangente de redução de histerese. A precisão da contagem de comprimidos melhorou de 98,5% para 99,8%, atendendo aos requisitos da FDA e reduzindo o desperdício em $25.000 por mês. 💊
Técnicas avançadas de remuneração
Aplicação do sinal de dither
A excitação de alta frequência pode superar a histerese baseada no atrito:
- Seleção de frequência: Escolha frequências acima da largura de banda do sistema
- Otimização da amplitude: Equilibre a eficácia com a estabilidade do sistema
- Design da forma de onda: Sinais sinusoidais, triangulares ou aleatórios
- Métodos de implementação: Geração de hardware ou software
Métodos de controlo preditivo
As abordagens baseadas em modelos proporcionam uma compensação de histerese superior:
- Identificação do sistema: Desenvolvimento de modelos matemáticos
- Filtragem de Kalman: Estimativa do estado ideal
- Controlo preditivo do modelo: Otimização do estado futuro
- Modelagem adaptativa: Atualizações dos parâmetros do modelo em tempo real
Manutenção e calibração
Procedimentos de calibração regulares
A calibração sistemática mantém um baixo desempenho de histerese:
- Mapeamento periódico da histerese: Documentar as alterações de desempenho
- Inspeção de componentes: Identificar a degradação relacionada com o desgaste
- Manutenção da lubrificação: Manter níveis ótimos de atrito
- Verificação do alinhamento: Garantir a precisão mecânica
Estratégias de manutenção preditiva
A manutenção proativa evita a degradação por histerese:
- Tendências de desempenho: Acompanhe as alterações da histerese ao longo do tempo
- Acompanhamento da vida útil dos componentes: Substituir os componentes antes da avaria
- Monitorização do estado: Avaliação contínua da integridade do sistema
- Substituição preventiva: Agende a manutenção com base na utilização
Na Bepto, os nossos pacotes de redução de histerese normalmente alcançam uma melhoria de 70-85% na precisão de posicionamento, com muitos clientes relatando níveis de histerese inferiores a 0,5% nas suas aplicações mais exigentes — um desempenho que se traduz diretamente em maior qualidade do produto e redução de desperdício. 🎯
Conclusão
Compreender e controlar a histerese é essencial para obter um controlo preciso do atuador proporcional, exigindo medições sistemáticas, compensação direcionada e manutenção contínua para um desempenho ideal.
Perguntas frequentes sobre histerese no controlo do atuador proporcional
P: O que é considerado histerese aceitável em sistemas de atuadores proporcionais?
A histerese aceitável depende dos requisitos da aplicação: a automação geral tolera 2-5%, a montagem de precisão necessita de menos de 1% e as aplicações de ultraprecisão exigem níveis de histerese inferiores a 0,5%. Os nossos sistemas Bepto normalmente atingem uma histerese de 0,3-0,8% com a implementação adequada.
P: A compensação por software pode eliminar completamente a histerese mecânica?
A compensação por software pode reduzir a histerese em 60-80%, mas não pode eliminar completamente fontes mecânicas como folga e atrito. A combinação de melhorias mecânicas com compensação por software alcança os melhores resultados, normalmente com histerese total do sistema inferior a 1%.
P: Com que frequência devo recalibrar o meu sistema de controlo proporcional para histerese?
A frequência da calibração depende da intensidade de uso e dos requisitos de precisão: sistemas de alta precisão precisam de calibração mensal, aplicações gerais requerem verificações trimestrais e sistemas de baixa precisão podem usar cronogramas de calibração anual com monitoramento contínuo do desempenho.
P: Qual é a diferença entre histerese e folga em sistemas atuadores?
A folga é o jogo mecânico nas ligações e engrenagens, enquanto a histerese inclui todos os efeitos dependentes da posição, incluindo atrito, efeitos magnéticos e bandas mortas do sistema de controlo. A folga é um componente da histerese total do sistema.
P: Como posso saber se a histerese está a causar os meus problemas de posicionamento?
A histerese cria padrões característicos: erros de posicionamento consistentes que dependem da direção de aproximação, precisão diferente ao mover para cima e para baixo e padrões de erro repetíveis. Testes de posicionamento bidirecionais revelam loops de histerese que confirmam o diagnóstico.
-
Aprenda sobre os princípios físicos da histerese e o seu impacto na precisão em diferentes disciplinas de engenharia. ↩
-
Compreenda as causas e as soluções de engenharia para eliminar a folga nas ligações mecânicas. ↩
-
Explore a mecânica interna e os princípios operacionais das válvulas de controlo pneumáticas proporcionais. ↩
-
Descubra a mecânica por trás do fenómeno stick-slip e como ele afeta o movimento do atuador em baixa velocidade. ↩
-
Obtenha uma compreensão mais profunda da teoria do controlo PID e sua aplicação na automação industrial. ↩
