

ฮิสเทอรีซิส1 คือความแม่นยำที่มองไม่เห็นซึ่งซ่อนตัวอยู่ในระบบขับเคลื่อนแบบสัดส่วนทุกระบบ—ทำลายความแม่นยำในการกำหนดตำแหน่งอย่างเงียบๆ สูงถึง 15% ในขณะที่วิศวกรโทษทุกอย่างยกเว้นตัวการที่แท้จริง ปรากฏการณ์นี้ทำให้ตัวขับเคลื่อน “จดจำ” ตำแหน่งก่อนหน้าของตน สร้างโซนตายที่คาดเดาไม่ได้ซึ่งเปลี่ยนการควบคุมที่ราบรื่นให้กลายเป็นความไม่สม่ำเสมอที่น่าหงุดหงิด 😠
ฮิสเทอรีซิสในการควบคุมแอคชูเอเตอร์แบบสัดส่วนทำให้เกิดข้อผิดพลาดในการกำหนดตำแหน่ง 2-15% ของระยะเคลื่อนที่ทั้งหมดเนื่องจากแบ็คแลชเชิงกล แรงเสียดทานของซีล ผลกระทบทางแม่เหล็ก และแถบตายของวาล์วควบคุม ซึ่งต้องชดเชยผ่านอัลกอริธึมซอฟต์แวร์ การปรับโหลดล่วงหน้าเชิงกล การป้อนกลับที่มีความละเอียดสูงขึ้น และการเลือกชิ้นส่วนที่เหมาะสมเพื่อให้ได้ความแม่นยำในการกำหนดตำแหน่งต่ำกว่า 1%.
เมื่อสองเดือนที่แล้ว ฉันได้ทำงานร่วมกับเจนนิเฟอร์ วิศวกรควบคุมที่โรงงานผลิตอากาศยานในซีแอตเทิล ซึ่งหุ่นยนต์ประกอบที่มีความแม่นยำสูงของเธอมีปัญหาในการจับเป้าหมายไม่ตรงจุด โดยคลาดเคลื่อน 3 มิลลิเมตรอย่างสม่ำเสมอ—ไม่ใช่แบบสุ่ม แต่เป็นรูปแบบที่สามารถคาดการณ์ได้ ซึ่งบ่งชี้ถึงปัญหาฮิสเทอรีซิสอย่างชัดเจน หลังจากที่เราได้นำโซลูชัน Bepto เพื่อแก้ปัญหาฮิสเทอรีซิสไปใช้ ข้อผิดพลาดในการวางตำแหน่งของเธอลดลงเหลือต่ำกว่า 0.5 มิลลิเมตร ✈️
สารบัญ
- ฮิสเทอรีซิสคืออะไรและทำไมจึงเกิดขึ้นในแอคชูเอเตอร์แบบสัดส่วน?
- ฮิสเทอรีซิสมีผลกระทบต่อระบบควบคุมแบบสัดส่วนประเภทต่างๆ อย่างไร?
- เทคนิคการวัดใดที่สามารถระบุและวัดปริมาณผลกระทบของฮิสเทอรีซิสได้ดีที่สุด?
- วิธีการที่มีประสิทธิภาพมากที่สุดในการลดฮิสเทอรีซิสในระบบของคุณคืออะไร?
ฮิสเทอรีซิสคืออะไรและทำไมจึงเกิดขึ้นในแอคชูเอเตอร์แบบสัดส่วน?
การเข้าใจกลไกฮิสเทอรีซิสเป็นสิ่งจำเป็นสำหรับการควบคุมแบบสัดส่วนที่แม่นยำในระบบแอคชูเอเตอร์แบบนิวแมติกและไฮดรอลิก.
ฮิสเทอรีซิสเกิดขึ้นเมื่อตำแหน่งเอาต์พุตของแอคชูเอเตอร์ขึ้นอยู่กับทั้งคำสั่งอินพุตปัจจุบันและประวัติตำแหน่งก่อนหน้า ทำให้เกิดเส้นทางการตอบสนองที่แตกต่างกันสำหรับคำสั่งที่เพิ่มขึ้นและลดลงเนื่องจากแรงย้อนกลับทางกล แรงเสียดทาน ผลกระทบทางแม่เหล็ก และแถบความตายของวาล์วควบคุมที่สะสมตลอดวงจรควบคุม.
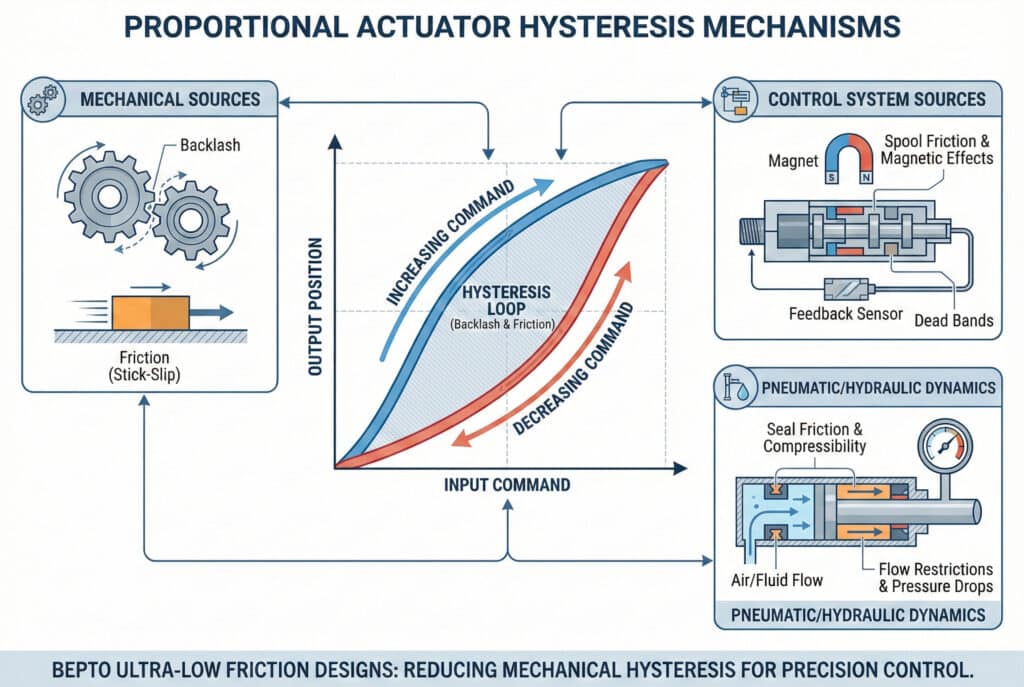
กลไกฮิสเทอรีซิสพื้นฐาน
แหล่งกำเนิดทางกล
องค์ประกอบทางกายภาพมีส่วนสำคัญอย่างมากต่อฮิสเทอรีซิสของระบบ:
- การตอบโต้กลับ2: ชุดเฟือง, ข้อต่อ, และการเชื่อมต่อสร้างโซนตาย
- แรงเสียดทาน: ความแตกต่างของแรงเสียดทานสถิตและแรงเสียดทานจลน์ทำให้เกิดพฤติกรรมการติด-ลื่น
- การปฏิบัติตามข้อกำหนด: การเปลี่ยนรูปยืดหยุ่นในกลไกเชิงกล
- รูปแบบการสวมใส่: การสึกหรอของชิ้นส่วนทำให้เกิดพื้นผิวสัมผัสที่ไม่สม่ำเสมอ
แหล่งที่มาของระบบควบคุม
องค์ประกอบควบคุมอิเล็กทรอนิกส์และนิวเมติกส์เพิ่มฮิสเทอรีซิส:
| ประเภทของส่วนประกอบ | ฮิสเทอรีซิสทั่วไป | สาเหตุหลัก | กลยุทธ์การบรรเทาผลกระทบ |
|---|---|---|---|
| เซอร์โววาล์ว | 0.1-0.5% | แรงเสียดทานของม้วน | การกระจายความถี่สูง |
| วาล์วแบบสัดส่วน3 | 0.5-2% | ฮิสเทอรีซิสแม่เหล็ก | การชดเชยความคิดเห็น |
| เซ็นเซอร์ตำแหน่ง | 0.05-0.2% | เสียงรบกวนทางอิเล็กทรอนิกส์ | การกรองสัญญาณ |
| เครื่องขยายเสียง | 0.1-0.3% | การตั้งค่าวงดนตรีที่ตายแล้ว | การปรับเทียบ |
แหล่งกำเนิดทางกายภาพในระบบนิวเมติก
ผลกระทบจากแรงเสียดทานของซีล
ซีลนิวเมติกสร้างแหล่งฮิสเทอรีซิสที่สำคัญ:
- แรงเสียดทานการลื่นไถล: แรงที่มากขึ้นจำเป็นต้องใช้เพื่อเริ่มการเคลื่อนที่
- แรงเสียดทานขณะวิ่ง: แรงที่ลดลงในระหว่างการเคลื่อนไหวต่อเนื่อง
- พฤติกรรมการติด-หลุด4: การเคลื่อนไหวที่ไม่สม่ำเสมอที่ความเร็วต่ำ
- การพึ่งพาอุณหภูมิ: แรงเสียดทานเปลี่ยนแปลงตามอุณหภูมิการทำงาน
พลวัตของแรงดัน
ผลกระทบของแรงดันในระบบนิวเมติกมีส่วนทำให้เกิดฮิสเทรีซิส:
- การบีบอัด: การอัดอากาศทำให้เกิดพฤติกรรมคล้ายสปริง
- ข้อจำกัดการไหล: ข้อจำกัดของวาล์วและข้อต่อทำให้เกิดความล่าช้า
- ความดันลดลง: การสูญเสียในสายทำให้เกิดแรงที่ขึ้นอยู่กับตำแหน่ง
- ผลกระทบของอุณหภูมิ: การขยายตัวทางความร้อนส่งผลต่อความแข็งของระบบ
ที่ Bepto, เราได้ออกแบบกระบอกสูบไร้ก้านของเราด้วยซีลที่มีแรงเสียดทานต่ำมากและระบบนำทางที่ผลิตด้วยความแม่นยำสูง ซึ่งช่วยลดการเกิดฮิสเทอรีซิสทางกลได้ถึง 60% เมื่อเทียบกับการออกแบบมาตรฐาน—ซึ่งมีความสำคัญอย่างยิ่งสำหรับการใช้งานที่ต้องการการควบคุมแบบสัดส่วนที่มีความแม่นยำสูง 🎯
ฮิสเทอรีซิสที่ขึ้นอยู่กับโหลด
ผลกระทบจากน้ำหนักบรรทุกที่เปลี่ยนแปลง
แรงภายนอกมีอิทธิพลอย่างมากต่อลักษณะฮิสเทรีซิส:
- แรงโน้มถ่วง: การเปลี่ยนแปลงของแรงตามตำแหน่ง
- โหลดเฉื่อย: ความต้องการแรงที่ขึ้นอยู่กับความเร่ง
- โหลดของกระบวนการ: แรงภายนอกที่เปลี่ยนแปลงระหว่างการทำงาน
- แรงเสียดทาน: การเปลี่ยนแปลงของแรงสัมผัสพื้นผิว
การโต้ตอบของโหลดแบบไดนามิก
การเคลื่อนย้ายของน้ำหนักก่อให้เกิดรูปแบบฮีสเทอรีซิสที่ซับซ้อน:
- ผลกระทบของความเร่ง: แรงเฉื่อยระหว่างการเปลี่ยนความเร็ว
- การเชื่อมต่อแบบสั่นสะเทือน: การสั่นสะเทือนจากภายนอกส่งผลต่อการกำหนดตำแหน่ง
- ปฏิสัมพันธ์แบบเรโซแนนซ์: การกระตุ้นความถี่ธรรมชาติ
- การเปลี่ยนแปลงของการหน่วง: ลักษณะการหน่วงที่ขึ้นอยู่กับโหลด
ฮิสเทอรีซิสมีผลกระทบต่อระบบควบคุมแบบสัดส่วนประเภทต่างๆ อย่างไร?
ผลกระทบของฮิสเทอรีซิสมีความแตกต่างกันอย่างมีนัยสำคัญในเทคโนโลยีตัวกระตุ้นและสถาปัตยกรรมการควบคุมที่แตกต่างกัน ซึ่งจำเป็นต้องมีกลยุทธ์การชดเชยที่ปรับให้เหมาะสม.
ระบบสัดส่วนแบบเปิดวงจรมักประสบกับข้อผิดพลาดฮิสเทอรีซิส 5-15% โดยไม่สามารถแก้ไขได้ ในขณะที่ระบบแบบปิดวงจรสารถูกลดฮิสเทอรีซิสลงเหลือ 0.5-2% ผ่านการชดเชยการป้อนกลับ โดยระบบเซอร์โวขั้นสูงสามารถบรรลุความแม่นยำต่ำกว่า 0.1% โดยใช้ตัวเข้ารหัสความละเอียดสูงและอัลกอริธึมการควบคุมที่ซับซ้อน.
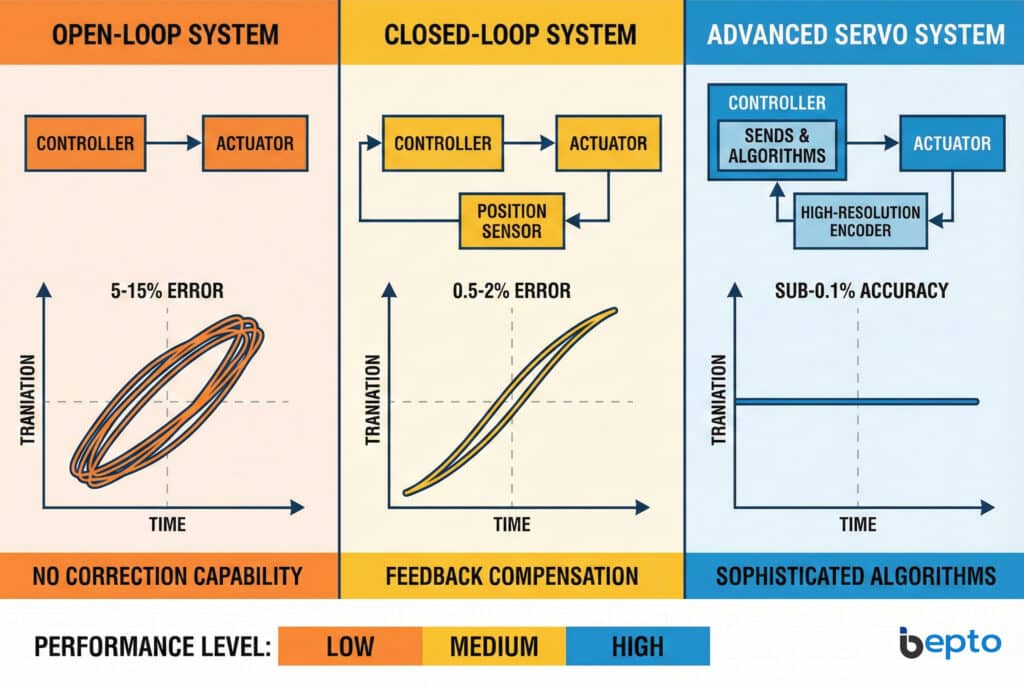
ระบบควบคุมแบบเปิดวงจร
ข้อจำกัดที่มีอยู่โดยธรรมชาติ
ระบบแบบเปิดลูปไม่สามารถชดเชยผลกระทบของฮิสเทอรีซิสได้:
- ไม่มีการแก้ไขตามข้อเสนอแนะ: ข้อผิดพลาดสะสมโดยไม่ถูกตรวจพบ
- รูปแบบที่คาดการณ์ได้: ฮิสเทอรีซิสทำให้เกิดข้อผิดพลาดในการจัดตำแหน่งซ้ำได้
- ความไวต่ออุณหภูมิ: ประสิทธิภาพอาจเปลี่ยนแปลงตามเงื่อนไขการใช้งาน
- การพึ่งพาโหลด: โหลดที่แตกต่างกันสร้างรูปแบบฮีสเตอร์รีสที่แตกต่างกัน
ลักษณะการทำงานทั่วไป
ประสิทธิภาพของฮิสเทอรีซิสในระบบเปิดจะแตกต่างกันไปตามการใช้งาน:
| ประเภทการสมัคร | ช่วงฮิสเทอรีซิส | การใช้งานที่ยอมรับได้ | ข้อจำกัดด้านประสิทธิภาพ |
|---|---|---|---|
| การจัดตำแหน่งอย่างง่าย | 5-15% | งานที่ไม่สำคัญ | การทำซ้ำได้ไม่ดี |
| การควบคุมความเร็ว | 3-8% | การควบคุมความเร็วแบบหยาบ | ประสิทธิภาพที่แปรผัน |
| การควบคุมกำลัง | 10-25% | การประยุกต์ใช้แรงพื้นฐาน | ผลลัพธ์ไม่สม่ำเสมอ |
| ระบบหลายแกน | 8-20% | ระบบอัตโนมัติแบบง่าย | ข้อผิดพลาดสะสม |
ระบบควบคุมแบบปิดวงจร
ผลตอบรับ ผลประโยชน์การชดเชย
ระบบแบบปิดสามารถชดเชยฮิสเทอรีซิสได้อย่างมีประสิทธิภาพ:
- การตรวจจับข้อผิดพลาด: การตรวจสอบตำแหน่งอย่างต่อเนื่อง
- การแก้ไขแบบเรียลไทม์: การตอบสนองทันทีต่อข้อผิดพลาดในการกำหนดตำแหน่ง
- การควบคุมแบบปรับตัว การเรียนรู้อัลกอริทึมช่วยปรับปรุงประสิทธิภาพ
- การปฏิเสธการรบกวน: การชดเชยแรงภายนอก
ประสิทธิภาพของอัลกอริทึมควบคุม
กลยุทธ์การควบคุมที่แตกต่างกันจัดการกับฮิสเทอรีซิสด้วยความสำเร็จที่แตกต่างกัน:
- การควบคุมแบบพีไอดี5: ค่าตอบแทนพื้นฐาน, 2-5% ความล่าช้าคงเหลือ
- การควบคุมแบบป้อนกลับล่วงหน้า ค่าตอบแทนเชิงคาดการณ์, 1-3% ส่วนที่เหลือ
- การควบคุมแบบปรับตัว การเรียนรู้ค่าชดเชย, 0.5-2% คงเหลือ
- การควบคุมแบบจำลอง: ค่าชดเชยเชิงทฤษฎี, 0.1-1% คงเหลือ
ระบบควบคุมเซอร์โว
เทคนิคการจ่ายค่าตอบแทนขั้นสูง
ระบบเซอร์โวประสิทธิภาพสูงใช้การชดเชยฮิสเทรีซิสที่ซับซ้อน:
- การแมปฮิสเทอรีซิส: ตารางลักษณะของระบบและการชดเชย
- เทคนิคการโหลดล่วงหน้า: ความเอนเอียงเชิงกลเพื่อกำจัดโซนที่ตรวจไม่พบ
- สัญญาณดิทเธอร์: การกระตุ้นความถี่สูงเพื่อเอาชนะแรงเสียดทาน
- อัลกอริทึมการทำนาย: การทำนายฮิสเทอรีซิสแบบใช้แบบจำลอง
ไมเคิล วิศวกรหุ่นยนต์ที่โรงงานผลิตความแม่นยำสูงในนอร์ทแคโรไลนา ได้ดำเนินการอัปเกรดระบบควบคุมเซอร์โวตามคำแนะนำของเราในสายการประกอบของเขา ความแม่นยำในการวางตำแหน่งของเขาเพิ่มขึ้นจาก ±2.5 มม. เป็น ±0.3 มม. ลดข้อบกพร่องของผลิตภัณฑ์ลง 75% และประหยัดค่าใช้จ่ายในการทำงานซ้ำได้ $50,000 ต่อเดือน 🤖
ความท้าทายของระบบหลายแกน
ผลกระทบสะสม
แอคชูเอเตอร์หลายตัวทำให้เกิดปัญหาฮิสเทอรีซิสเพิ่มขึ้น:
- การสะสมข้อผิดพลาด: ข้อผิดพลาดของแกนแต่ละแกนรวมกัน
- ผลกระทบจากการเชื่อมโยง: ปฏิสัมพันธ์ของแกนสร้างรูปแบบที่ซับซ้อน
- ปัญหาการซิงโครไนซ์: รูปแบบฮิสเทอรีซิสที่แตกต่างกันก่อให้เกิดปัญหาการประสานงาน
- ความซับซ้อนของการสอบเทียบ: ระบบหลายระบบต้องการการปรับแต่งเฉพาะตัว
กลยุทธ์การประสานงาน
ระบบหลายแกนขั้นสูงใช้เทคนิคเฉพาะทาง:
- การควบคุมแบบมาสเตอร์-สเลฟ: แกนหนึ่งนำ ส่วนแกนอื่น ๆ ตาม
- การชดเชยการเชื่อมต่อข้าม: การแก้ไขปฏิสัมพันธ์แกน
- การกำหนดตำแหน่งแบบซิงโครไนซ์: โปรไฟล์การเคลื่อนไหวที่ประสานกัน
- การปรับให้เหมาะสมที่สุดทั่วโลก: การเพิ่มประสิทธิภาพการทำงานทั่วทั้งระบบ
เทคนิคการวัดใดที่สามารถระบุและวัดปริมาณผลกระทบของฮิสเทอรีซิสได้ดีที่สุด?
การวัดและการวิเคราะห์ฮิสเทอรีซิสอย่างแม่นยำช่วยให้สามารถพัฒนากลยุทธ์การชดเชยที่มีประสิทธิภาพและเพิ่มประสิทธิภาพของระบบได้.
การวัดฮิสเทอรีซิสต้องใช้การทดสอบตำแหน่งแบบสองทิศทางด้วยตัวเข้ารหัสความละเอียดสูง บันทึกความสัมพันธ์ระหว่างตำแหน่งกับคำสั่งผ่านรอบการทำงานทั้งหมด วิเคราะห์ความกว้างของลูปและรูปแบบความไม่สมมาตร และบันทึกการพึ่งพาอุณหภูมิและโหลดเพื่อสร้างแผนที่การชดเชยที่ครอบคลุมสำหรับประสิทธิภาพการควบคุมที่ดีที่สุด.
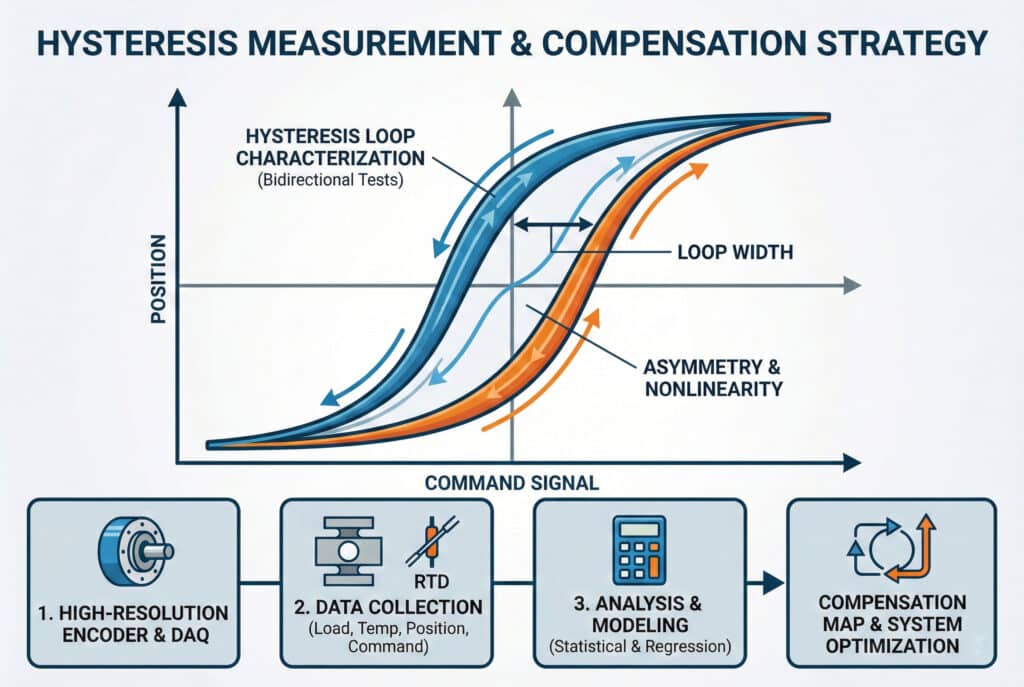
มาตรฐานการวัดโปรโตคอล
การทดสอบตำแหน่งแบบสองทิศทาง
การวิเคราะห์ลักษณะฮิสเทอรีซิสอย่างครอบคลุมต้องอาศัยการทดสอบอย่างเป็นระบบ:
- รอบการเคลื่อนที่เต็มรูปแบบ: ทำตามลำดับการยืดและหดอย่างสมบูรณ์
- หลายความเร็ว: โปรไฟล์ความเร็วต่าง ๆ เพื่อระบุการพึ่งพาอัตรา
- การเปลี่ยนแปลงของโหลด: โหลดภายนอกที่แตกต่างกันเพื่อทำแผนที่ผลกระทบของโหลด
- ช่วงอุณหภูมิ: การประเมินผลกระทบของอุณหภูมิในการทำงาน
ข้อกำหนดการรวบรวมข้อมูล
การวัดฮิสเทอรีซิสอย่างแม่นยำต้องการเครื่องมือวัดคุณภาพสูง:
| พารามิเตอร์การวัด | ความละเอียดที่ต้องการ | อุปกรณ์ทั่วไป | เป้าหมายความถูกต้อง |
|---|---|---|---|
| ข้อเสนอแนะเกี่ยวกับตำแหน่งงาน | 0.01% ของโรคหลอดเลือดสมอง | ตัวเข้ารหัสเชิงเส้น | ±0.005% |
| สัญญาณคำสั่ง | ขั้นต่ำ 12 บิต | ระบบ DAQ | ±0.1% |
| การวัดปริมาณ | 1% ของแรงที่กำหนด | โหลดเซลล์ | ±0.5% |
| อุณหภูมิ | ±1°C | เซ็นเซอร์ RTD | ±0.5°C |
เทคนิคการวิเคราะห์
การวิเคราะห์ลักษณะของลูปฮิสเทอรีซิส
การวิเคราะห์ทางคณิตศาสตร์เผยให้เห็นลักษณะฮิสเทอรีซิส:
- ความกว้างของลูป: ความแตกต่างของตำแหน่งสูงสุดที่คำสั่งเดียวกัน
- ความไม่สมมาตร: ความเอนเอียงเชิงทิศทางในข้อผิดพลาดของการกำหนดตำแหน่ง
- ความไม่เชิงเส้น: การเบี่ยงเบนจากการตอบสนองเชิงเส้นที่เหมาะสม
- ความสามารถในการทำซ้ำ: ความสม่ำเสมอในหลายรอบ
วิธีการวิเคราะห์ทางสถิติ
เทคนิคการวิเคราะห์ขั้นสูงวัดผลกระทบของฮิสเทอรีซิส:
- ค่าเบี่ยงเบนมาตรฐาน: การวัดความซ้ำซ้อนของการจัดตำแหน่ง
- การวิเคราะห์ความสัมพันธ์ ความสัมพันธ์ระหว่างอินพุตและเอาต์พุต
- การวิเคราะห์ความถี่: ลักษณะการตอบสนองแบบไดนามิก
- การวิเคราะห์การถดถอย การพัฒนาแบบจำลองทางคณิตศาสตร์
ระบบการตรวจสอบแบบเรียลไทม์
การติดตามฮิสเทอรีซิสอย่างต่อเนื่อง
ระบบการผลิตได้รับประโยชน์จากการตรวจสอบฮิสเทรีซิสอย่างต่อเนื่อง:
- เซ็นเซอร์ฝังตัว: ระบบป้อนกลับตำแหน่งในตัว
- การบันทึกข้อมูล: การบันทึกผลการปฏิบัติงานอย่างต่อเนื่อง
- การวิเคราะห์แนวโน้ม: การติดตามการเสื่อมประสิทธิภาพในระยะยาว
- การบำรุงรักษาเชิงคาดการณ์: การแจ้งเตือนล่วงหน้าเกี่ยวกับการสึกหรอของชิ้นส่วน
ระบบวินิจฉัย Bepto ของเราประกอบด้วยระบบตรวจสอบฮีสเทอรีซิสแบบเรียลไทม์ ซึ่งแจ้งเตือนผู้ปฏิบัติงานเมื่อเกิดข้อผิดพลาดในการจัดตำแหน่งเกินเกณฑ์ 0.5% ช่วยให้สามารถบำรุงรักษาเชิงป้องกันได้ก่อนที่ความแม่นยำจะลดลงถึงระดับที่ยอมรับไม่ได้ 📊
การประเมินผลกระทบสิ่งแวดล้อม
ผลกระทบของอุณหภูมิ
อุณหภูมิมีอิทธิพลอย่างมากต่อลักษณะฮิสเทอรีซิส:
- การขยายตัวทางความร้อน: การเปลี่ยนแปลงขนาดเชิงกล
- การเปลี่ยนแปลงความหนืด: การเปลี่ยนแปลงสมบัติของของไหล
- คุณสมบัติของวัสดุ: การพึ่งพาอุณหภูมิของโมดูลัสยืดหยุ่น
- ประสิทธิภาพของซีล: การเปลี่ยนแปลงของสัมประสิทธิ์ความเสียดทาน
การวิเคราะห์การพึ่งพาของโหลด
โหลดภายนอกสร้างรูปแบบฮิสเทอรีซิสที่ซับซ้อน:
- น้ำหนักคงที่: ผลกระทบของแรงคงที่ต่อการกำหนดตำแหน่ง
- โหลดแบบไดนามิก: แรงกระแทกที่แปรผันระหว่างการเคลื่อนไหว
- ผลกระทบจากความเฉื่อย: ข้อผิดพลาดในการระบุตำแหน่งที่ขึ้นอยู่กับความเร่ง
- การเปลี่ยนแปลงของความเสียดทาน: ผลกระทบของสภาพพื้นผิวต่อประสิทธิภาพ
วิธีการที่มีประสิทธิภาพมากที่สุดในการลดฮิสเทอรีซิสในระบบของคุณคืออะไร?
การนำกลยุทธ์การลดฮิสเทอรีซิสแบบครอบคลุมมาใช้สามารถบรรลุความแม่นยำในการกำหนดตำแหน่งต่ำกว่า 1% ในแอปพลิเคชันการควบคุมแบบสัดส่วนที่ต้องการความแม่นยำสูง.
การลดฮิสเทอรีซิสอย่างมีประสิทธิภาพผสานการปรับปรุงทางกลศาสตร์ เช่น การใช้ชิ้นส่วนที่มีแรงเสียดทานต่ำและการกำจัดแบ็คแลช การปรับปรุงระบบควบคุมด้วยการชดเชยแบบฟีดฟอร์เวิร์ดและอัลกอริทึมแบบปรับตัว รวมถึงการควบคุมสภาพแวดล้อมเพื่อความเสถียรของอุณหภูมิและโหลด โดยทั่วไปสามารถลดฮิสเทอรีซิสจาก 5-15% ให้เหลือน้อยกว่า 1% ของสเกลเต็ม.
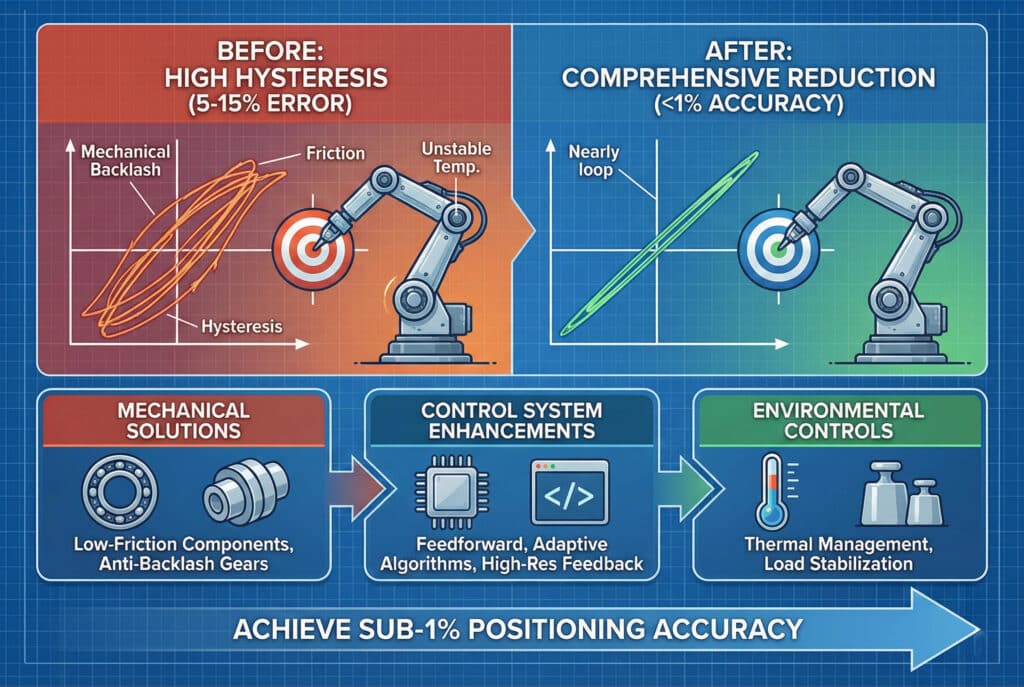
โซลูชันทางกล
การเลือกและการออกแบบส่วนประกอบ
เลือกส่วนประกอบที่ออกแบบมาโดยเฉพาะสำหรับฮิสเทอรีซิสต่ำ:
- ลูกปืนความแม่นยำสูง: รางนำเชิงเส้นคุณภาพสูงที่มีการเคลื่อนที่น้อยมาก
- ซีลแรงเสียดทานต่ำ: วัสดุและรูปแบบการซีลขั้นสูง
- ข้อต่อแบบแข็ง: กำจัดแหล่งที่มาของการย้อนกลับเชิงกล
- ระบบที่ติดตั้งไว้ล่วงหน้า: ความเอนเอียงเชิงกลเพื่อกำจัดโซนที่ตรวจไม่พบ
การปรับปรุงสถาปัตยกรรมระบบ
ออกแบบระบบกลไกเพื่อลดแหล่งที่มาของความล่าช้า:
| คุณสมบัติการออกแบบ | การลดฮิสเทอรีซิส | ค่าใช้จ่ายในการดำเนินการ | ผลกระทบจากการบำรุงรักษา |
|---|---|---|---|
| ขับเคลื่อนโดยตรง | 80-90% | สูง | ต่ำ |
| คู่มือที่ติดตั้งไว้ล่วงหน้า | 60-70% | ระดับกลาง | ระดับกลาง |
| ข้อต่อความแม่นยำสูง | 40-50% | ต่ำ | ต่ำ |
| เฟืองป้องกันการย้อนกลับ | 70-80% | ระดับกลาง | สูง |
การปรับปรุงระบบควบคุม
เทคนิคการชดเชยซอฟต์แวร์
อัลกอริทึมการควบคุมขั้นสูงสามารถลดผลกระทบของฮิสเทอรีซิสได้อย่างมีนัยสำคัญ:
- การแมปฮิสเทอรีซิส: ตารางค้นหาสำหรับการแก้ไขตำแหน่ง
- การควบคุมแบบป้อนกลับล่วงหน้า การจ่ายค่าตอบแทนเชิงคาดการณ์ตามคำสั่งที่ได้รับมอบหมาย
- อัลกอริทึมแบบปรับตัวได้: การชดเชยฮิสเทรีซิสแบบเรียนรู้ด้วยตนเอง
- การควบคุมแบบจำลอง: การทำนายฮิสเทอรีซิสโดยใช้พื้นฐานทางฟิสิกส์
การปรับปรุงระบบการให้ข้อเสนอแนะ
ระบบป้อนกลับที่ได้รับการปรับปรุงช่วยให้การชดเชยฮิสเทอรีซิสมีประสิทธิภาพยิ่งขึ้น:
- ตัวเข้ารหัสความละเอียดสูง: การวัดตำแหน่งที่แม่นยำยิ่งขึ้น
- เซ็นเซอร์ป้อนกลับหลายตัว: การวัดตำแหน่งที่ซ้ำซ้อน
- การตอบสนองความเร็ว: อัลกอริทึมการจ่ายค่าตอบแทนตามอัตรา
- การตอบสนองแบบแรง: การชดเชยฮิสเทอรีซิสที่ขึ้นอยู่กับโหลด
กลยุทธ์การควบคุมสิ่งแวดล้อม
การจัดการอุณหภูมิ
อุณหภูมิการทำงานที่คงที่ช่วยลดความแปรปรวนของฮิสเทรีซิส:
- ฉนวนกันความร้อน: ป้องกันแอคชูเอเตอร์จากความผันผวนของอุณหภูมิ
- การระบายความร้อนแบบแอคทีฟ: รักษาอุณหภูมิการทำงานให้คงที่
- การชดเชยอุณหภูมิ: การแก้ไขซอฟต์แวร์สำหรับผลกระทบจากความร้อน
- การปรับสภาพความร้อนล่วงหน้า อนุญาตให้ระบบเข้าสู่สมดุลความร้อน
การปรับเสถียรของโหลด
เงื่อนไขการโหลดที่สม่ำเสมอช่วยลดความแปรปรวนของฮีสเทอรีซิส:
- การแยกโหลด: แยกตัวจากความวุ่นวายภายนอก
- การถ่วงดุล: ลดผลกระทบจากแรงโน้มถ่วง
- การลดการสั่นสะเทือน: ลดความแปรปรวนของโหลดแบบไดนามิกให้เหลือน้อยที่สุด
- การเพิ่มประสิทธิภาพกระบวนการ: ลดแรงภายนอกที่แปรผัน
ซาร่าห์ วิศวกรกระบวนการที่โรงงานบรรจุภัณฑ์ยาในโคโลราโด ได้ดำเนินการตามโปรแกรมลดฮิสเทอรีซิสอย่างครอบคลุมของเรา ความแม่นยำในการนับเม็ดยาของเธอเพิ่มขึ้นจาก 98.5% เป็น 99.8% ซึ่งตรงตามข้อกำหนดของ FDA พร้อมทั้งลดของเสียลงได้ $25,000 ต่อเดือน 💊
เทคนิคการจ่ายค่าตอบแทนขั้นสูง
การประยุกต์ใช้สัญญาณดิทเธอร์
การกระตุ้นความถี่สูงสามารถเอาชนะการหน่วงแบบฮิสเทอรีซิสที่เกิดจากแรงเสียดทานได้:
- การเลือกความถี่: เลือกความถี่ที่สูงกว่าแบนด์วิดท์ของระบบ
- การเพิ่มประสิทธิภาพแอมพลิจูด: สมดุลประสิทธิภาพกับความเสถียรของระบบ
- การออกแบบรูปคลื่น: สัญญาณไซน์, สัญญาณรูปสามเหลี่ยม หรือสัญญาณสุ่ม
- วิธีการดำเนินการ: การผลิตฮาร์ดแวร์หรือซอฟต์แวร์
วิธีการควบคุมเชิงทำนาย
วิธีการที่ใช้แบบจำลองให้การชดเชยฮิสเทอรีซิสที่เหนือกว่า:
- การระบุระบบ: การพัฒนาแบบจำลองทางคณิตศาสตร์
- การกรองแบบคัลมาน: การประมาณค่าสถานะที่เหมาะสมที่สุด
- การควบคุมเชิงคาดการณ์แบบจำลอง: การเพิ่มประสิทธิภาพในอนาคต
- การจำลองแบบปรับตัวได้: การอัปเดตพารามิเตอร์ของแบบจำลองแบบเรียลไทม์
การบำรุงรักษาและการสอบเทียบ
ขั้นตอนการสอบเทียบเป็นประจำ
การสอบเทียบอย่างเป็นระบบช่วยรักษาประสิทธิภาพการเกิดฮิสเทอรีซิสต่ำ:
- การทำแผนที่ฮิสเทอรีซิสแบบเป็นระยะ บันทึกการเปลี่ยนแปลงประสิทธิภาพของเอกสาร
- การตรวจสอบชิ้นส่วน: ระบุการเสื่อมสภาพที่เกี่ยวข้องกับการสึกหรอ
- การบำรุงรักษาการหล่อลื่น: รักษาค่าความเสียดทานให้อยู่ในระดับที่เหมาะสม
- การตรวจสอบความสอดคล้อง: ตรวจสอบความแม่นยำทางกล
กลยุทธ์การบำรุงรักษาเชิงคาดการณ์
การบำรุงรักษาเชิงรุกช่วยป้องกันการเสื่อมสภาพแบบฮิสเทอรีซิส:
- แนวโน้มประสิทธิภาพ: ติดตามการเปลี่ยนแปลงของฮิสเทอรีซิสตามเวลา
- การติดตามอายุการใช้งานของชิ้นส่วน: เปลี่ยนชิ้นส่วนก่อนที่มันจะเสีย
- การตรวจสอบสภาพ: การประเมินสุขภาพระบบอย่างต่อเนื่อง
- การเปลี่ยนทดแทนเชิงป้องกัน: กำหนดตารางการบำรุงรักษาตามการใช้งาน
ที่ Bepto แพ็กเกจการลดฮิสเทอรีซิสของเราสามารถปรับปรุงความแม่นยำในการวางตำแหน่งได้ถึง 70-85% โดยลูกค้าหลายรายรายงานว่ามีระดับฮิสเทอรีซิสต่ำกว่า 0.5% ในการใช้งานที่ต้องการความแม่นยำสูงที่สุด—ประสิทธิภาพที่ส่งผลโดยตรงต่อคุณภาพผลิตภัณฑ์ที่สูงขึ้นและลดของเสีย 🎯
สรุป
การเข้าใจและควบคุมฮิสเทอรีซิสเป็นสิ่งจำเป็นสำหรับการควบคุมตัวกระตุ้นแบบสัดส่วนอย่างแม่นยำ ซึ่งต้องการการวัดอย่างเป็นระบบ การชดเชยที่ตรงจุด และการบำรุงรักษาอย่างต่อเนื่องเพื่อให้ได้ประสิทธิภาพที่ดีที่สุด.
คำถามที่พบบ่อยเกี่ยวกับฮิสเทอรีซิสในการควบคุมแอคชูเอเตอร์แบบสัดส่วน
ถาม: อะไรถือว่าเป็นการฮิสเทอรีซิสที่ยอมรับได้ในระบบแอคชูเอเตอร์แบบสัดส่วน?
ฮิสเทอรีซิสที่ยอมรับได้ขึ้นอยู่กับข้อกำหนดของการใช้งาน: ระบบอัตโนมัติทั่วไปสามารถทนได้ 2-5%, การประกอบที่มีความแม่นยำต้องการต่ำกว่า 1%, และการใช้งานที่ต้องการความแม่นยำสูงมากต้องการระดับฮิสเทอรีซิสต่ำกว่า 0.5% ระบบ Bepto ของเราสามารถทำได้โดยทั่วไปที่ 0.3-0.8% เมื่อมีการนำไปใช้อย่างถูกต้อง.
ถาม: การชดเชยด้วยซอฟต์แวร์สามารถกำจัดความล่าช้าเชิงกลได้อย่างสมบูรณ์หรือไม่?
การชดเชยด้วยซอฟต์แวร์สามารถลดความล่าช้า (hysteresis) ได้ถึง 60-80% แต่ไม่สามารถกำจัดแหล่งที่มาทางกลอย่างสมบูรณ์ เช่น การย้อนกลับ (backlash) และแรงเสียดทาน (friction) ได้ การผสมผสานการปรับปรุงทางกลกับการชดเชยด้วยซอฟต์แวร์จะให้ผลลัพธ์ที่ดีที่สุด โดยทั่วไปจะมีความล่าช้าของระบบทั้งหมดต่ำกว่า 1%.
ถาม: ควรปรับเทียบระบบควบคุมแบบสัดส่วนสำหรับฮิสเทอรีซิสบ่อยแค่ไหน?
ความถี่ในการสอบเทียบขึ้นอยู่กับระดับการใช้งานและความต้องการความแม่นยำ: ระบบที่ต้องการความแม่นยำสูงจำเป็นต้องสอบเทียบทุกเดือน การใช้งานทั่วไปควรตรวจสอบทุกไตรมาส และระบบที่มีความแม่นยำต่ำสามารถใช้ตารางสอบเทียบรายปีร่วมกับการตรวจสอบประสิทธิภาพอย่างต่อเนื่อง.
ถาม: ความแตกต่างระหว่างฮิสเทอรีซิสและแบ็คแลชในระบบแอคชูเอเตอร์คืออะไร?
แบ็คแลช (Backlash) คือการเคลื่อนที่เชิงกลที่เกิดขึ้นในข้อต่อและเฟือง ในขณะที่ฮิสเทอรีซิส (Hysteresis) ครอบคลุมผลกระทบทั้งหมดที่ขึ้นอยู่กับตำแหน่ง รวมถึงแรงเสียดทาน ผลกระทบทางแม่เหล็ก และแถบความไวต่ำของระบบควบคุม แบ็คแลชเป็นองค์ประกอบหนึ่งของฮิสเทอรีซิสทั้งหมดของระบบ.
ถาม: ฉันจะรู้ได้อย่างไรว่าฮิสเทอรีซิสเป็นสาเหตุของปัญหาการกำหนดตำแหน่งของฉัน?
ฮิสเทอรีซิสสร้างรูปแบบลักษณะเฉพาะ: ข้อผิดพลาดในการวางตำแหน่งที่คงที่ซึ่งขึ้นอยู่กับทิศทางการเข้าใกล้, ความแม่นยำที่แตกต่างกันเมื่อเคลื่อนที่ขึ้นเทียบกับลง, และรูปแบบข้อผิดพลาดที่เกิดซ้ำได้ การทดสอบการวางตำแหน่งสองทิศทางเผยให้เห็นลูปฮิสเทอรีซิสที่ยืนยันการวินิจฉัย.
-
เรียนรู้เกี่ยวกับหลักการทางกายภาพของฮิสเทอรีซิสและผลกระทบต่อความแม่นยำในสาขาวิศวกรรมต่างๆ. ↩
-
เข้าใจสาเหตุและวิธีการทางวิศวกรรมเพื่อกำจัดผลกระทบย้อนกลับในระบบเชื่อมโยงเชิงกล. ↩
-
สำรวจกลไกภายในและหลักการการทำงานของวาล์วควบคุมนิวเมติกแบบสัดส่วน. ↩
-
ค้นพบกลไกเบื้องหลังปรากฏการณ์การลื่นไถลของแท่งและผลกระทบต่อการเคลื่อนไหวของตัวกระตุ้นที่ความเร็วต่ำ. ↩
-
ทำความเข้าใจอย่างลึกซึ้งเกี่ยวกับทฤษฎีการควบคุมแบบ PID และการประยุกต์ใช้ในระบบอัตโนมัติอุตสาหกรรม. ↩
