

Introduction
Vos vérins pneumatiques traitent différentes charges tout au long du cycle de production, parfois en déplaçant des fixations vides, parfois en transportant des charges pleines de produits. Avec un amortissement fixe, les charges légères décélèrent trop brusquement tandis que les charges lourdes heurtent violemment les butées d'extrémité. Vous êtes obligé de choisir entre un amortissement excessif des charges légères ou un amortissement insuffisant des charges lourdes, et aucune de ces options n'offre des performances acceptables sur toute votre plage de fonctionnement. 🔄
Les coefficients d'amortissement des amortisseurs déterminent la force de décélération par rapport à la vitesse, avec des coefficients réglables permettant une optimisation pour des charges variables allant de 5 à 50 kg sur le même cylindre. Un réglage approprié permet d'adapter la force d'amortissement à l'énergie cinétique sur toute la plage de charge, évitant ainsi à la fois un rebond excessif (amortissement excessif des charges légères) et une décélération insuffisante (amortissement insuffisant des charges lourdes), avec des plages de réglage s'étendant généralement de 3:1 à 10:1 selon la conception et la qualité de l'amortisseur.
Le mois dernier, j'ai consulté Sarah, ingénieure des procédés dans une usine d'emballage pharmaceutique en Caroline du Nord. Sa chaîne de remplissage traitait des conteneurs de 2 à 18 kg en utilisant le même cylindre sans tige système de positionnement. Avec un amortissement fixe standard, les conteneurs légers rebondissaient et oscillaient pendant plus de 0,5 seconde, tandis que les conteneurs lourds subissaient des chocs suffisamment violents pour endommager les produits. L'efficacité de sa ligne souffrait de temps de stabilisation prolongés, et les dommages causés aux produits dépassaient 2% sur les conteneurs lourds. Elle avait besoin d'un amortissement variable capable de s'adapter à sa plage de charge de 9:1. 📊
Table des matières
- Que sont les coefficients d'amortissement et comment fonctionnent-ils ?
- Comment calculer l'amortissement requis pour différentes charges ?
- Quelles méthodes de réglage permettent un contrôle variable de l'amortissement ?
- Comment régler l'amortissement pour obtenir des performances optimales sur toutes les plages de charge ?
- Conclusion
- FAQ sur l'amortissement des amortisseurs
Que sont les coefficients d'amortissement et comment fonctionnent-ils ?
Comprendre la physique de l'amortissement permet de comprendre pourquoi l'ajustement des coefficients est essentiel pour les applications à charge variable. ⚙️
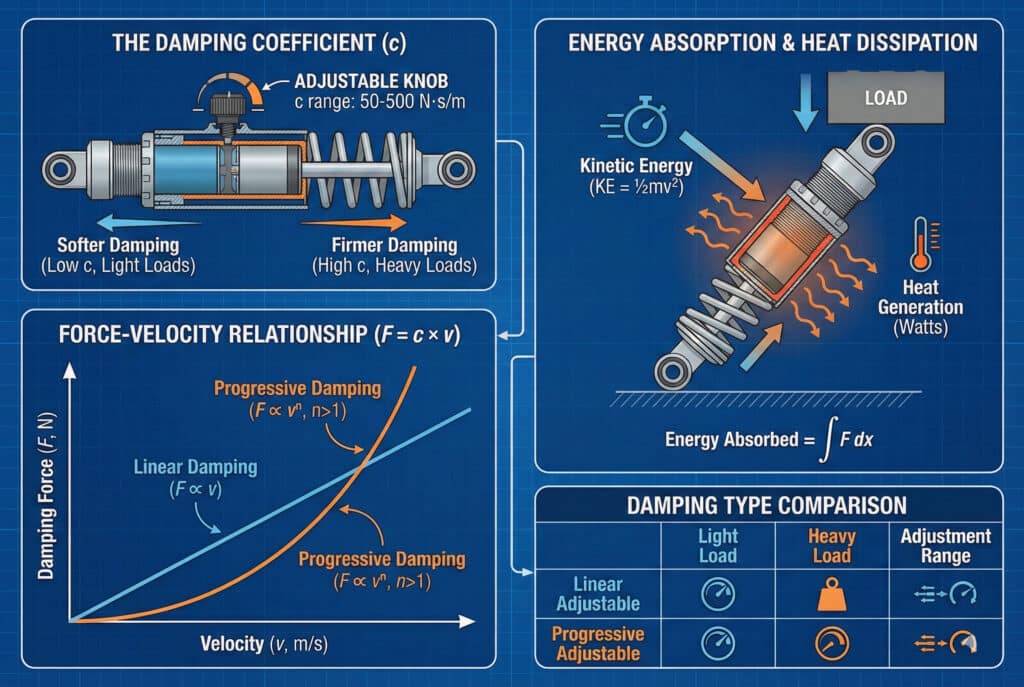
Le coefficient d'amortissement (c) définit la relation entre force d'amortissement1 et la vitesse par F = c × v, où la force augmente proportionnellement à la vitesse pour les amortisseurs linéaires ou de manière exponentielle pour les modèles progressifs. Les coefficients typiques varient entre 50 et 500 N·s/m pour les amortisseurs pneumatiques, les coefficients plus élevés produisant un amortissement plus ferme qui convient aux charges lourdes, tandis que les coefficients plus faibles offrent un amortissement plus souple pour les charges légères. Les amortisseurs réglables permettent des variations de coefficient de 3 à 10 fois afin de s'adapter à des énergies cinétiques variables sans remplacement de composants.
L'équation de la force d'amortissement
La force d'amortissement obéit aux principes fondamentaux de la physique :
$$
F_{amortissement} = c \times v
$$
Où ?
- F = Force d'amortissement (Newtons)
- c = Coefficient d'amortissement (N·s/m)
- v = Vitesse (m/s)
Exemple de calcul :
- Coefficient d'amortissement : 200 N·s/m
- Vitesse d'impact : 1,5 m/s
- Force d'amortissement : 200 × 1,5 = 300N
Cette relation linéaire signifie que doubler la vitesse double la force d'amortissement, ce qui permet une adaptation naturelle à l'énergie d'impact.
Amortissement linéaire vs amortissement progressif
Différents profils d'amortissement conviennent à différentes applications :
Amortissement linéaire (F = c × v) :
- Coefficient constant tout au long de la course
- Comportement prévisible et cohérent
- Idéal pour : applications à charge constante
- La force augmente proportionnellement à la vitesse.
Amortissement progressif (F = c × v^n, où n > 1) :
- Le coefficient augmente avec la compression
- Contact initial plus doux, finition plus ferme
- Idéal pour : applications à charge variable
- La force augmente de manière exponentielle avec la vitesse.
| Type d'amortissement | Réponse à charge légère | Réponse aux charges lourdes | Plage de réglage | Meilleure application |
|---|---|---|---|---|
| Linéaire fixe | Trop ferme | Trop mou | Aucun | Charge unique uniquement |
| Réglable linéairement | Réglable | Réglable | 3-5:1 | Variation modérée |
| Progressif fixe | Bon | Bon | Aucun | Plage de charge 2-3:1 |
| Réglable progressivement | Excellent | Excellent | 5-10:1 | Large variation de charge |
Capacité d'absorption d'énergie
Le coefficient d'amortissement détermine l'absorption totale d'énergie :
$$
Énergie_{absorbée}
= \int F \, dx
= \int (c \times v) \, dx
$$
Pour une longueur de course donnée, des coefficients d'amortissement plus élevés absorbent plus d'énergie, mais génèrent des forces maximales plus importantes. L'art du réglage consiste à adapter le coefficient aux besoins énergétiques sans dépasser les limites de force.
Directives pour la sélection des coefficients :
- Charges légères (5-10 kg) : c = 50-150 N·s/m
- Charges moyennes (10-25 kg) : c = 150-300 N·s/m
- Charges lourdes (25-50 kg) : c = 300-500 N·s/m
- Charges variables : plage réglable de 100 à 400 N·s/m
Efficacité d'amortissement et dissipation thermique
Convertisseurs à absorption d'énergie énergie cinétique2 pour chauffer :
Taux de production de chaleur :
- Énergie par cycle = ½mv²
- Cycles par minute = fréquence de fonctionnement
- Chaleur = Énergie × Fréquence
- Les applications à haute fréquence nécessitent de prendre en compte la dissipation thermique.
Pour l'application de Sarah en Caroline du Nord, fonctionnant à 45 cycles/minute avec des charges de 18 kg à 1,2 m/s :
- Énergie par cycle : ½ × 18 × 1,2² = 13 joules
- Production de chaleur : 13 J × 45/min = 585 watts
- Chaleur importante nécessitant un boîtier en aluminium pour la dissipation 🔥
Comment calculer l'amortissement requis pour différentes charges ?
Un calcul correct de l'amortissement garantit des performances optimales sur toute la plage de charge. 🔬
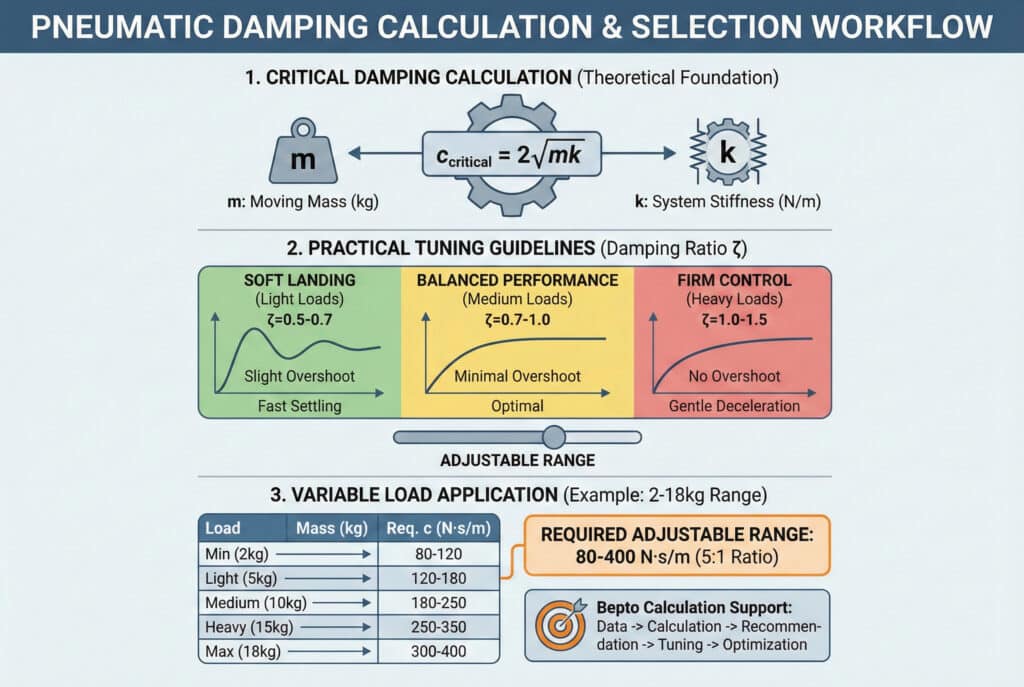
Calculez le coefficient d'amortissement requis en utilisant c = 2√(mk) pour amortissement critique3, où m est la masse mobile et k la rigidité du système, puis ajustez en fonction de la réponse souhaitée : 50-70% pour un atterrissage en douceur (charges légères), 80-100% pour des performances équilibrées (charges moyennes) ou 120-150% pour un contrôle ferme (charges lourdes). Pour les systèmes à charge variable, calculez les coefficients pour les charges minimales et maximales, puis sélectionnez des amortisseurs réglables couvrant cette plage avec une marge de 20-30%.
Calcul de l'amortissement critique
L'amortissement critique assure une stabilisation rapide sans oscillation :
$$
c_{critique} = 2 \sqrt{m k}
$$
Où ?
- m = Masse mobile (kg)
- k = Rigidité du système (N/m)
- c_critical = Coefficient d'amortissement critique (N·s/m)
Exemple – Charge légère :
- Masse : 8 kg
- Rigidité : 50 000 N/m (typique pour un amortisseur)
- c_critique = 2√(8 × 50 000) = 2√400 000 = 2 × 632 = 1 264 N·s/m
Pour les applications pneumatiques pratiques, utilisez un amortissement critique de 50-80% afin de permettre un léger dépassement pour un stabilisation plus rapide.
Sélection pratique de l'amortissement
Les applications concrètes nécessitent un ajustement par rapport aux valeurs théoriques :
Rapport d'amortissement4 (ζ) Lignes directrices :
- ζ = 0,3-0,5 (critique 30-50%) : sous-amorti, rapide mais avec dépassement
- ζ = 0,5-0,7 (50-70% critique) : Légèrement sous-amorti, bon équilibre
- ζ = 0,7-1,0 (70-100% critique) : quasi critique, dépassement minimal
- ζ = 1,0-1,5 (critique 100-150%) : suramortissement, lent mais sans dépassement
Sélection en fonction de l'application :
- Emballage à grande vitesse : ζ = 0,5-0,7 (décantation rapide)
- Positionnement de précision : ζ = 0,8-1,0 (dépassement minimal)
- Produits délicats : ζ = 1,0-1,5 (décélération douce)
Matrice de calcul de charge variable
Pour l'application pharmaceutique de Sarah avec une plage de 2 à 18 kg :
| Condition de charge | Masse (kg) | Vitesse (m/s) | KE (J) | Requis c (N·s/m) | Rapport d'amortissement |
|---|---|---|---|---|---|
| Charge minimale | 2 | 1.2 | 1.4 | 80-120 | 0.6-0.7 |
| Charge légère | 5 | 1.2 | 3.6 | 120-180 | 0.6-0.7 |
| Charge moyenne | 10 | 1.2 | 7.2 | 180-250 | 0.6-0.7 |
| Charge lourde | 15 | 1.2 | 10.8 | 250-350 | 0.6-0.7 |
| Charge maximale | 18 | 1.2 | 13.0 | 300-400 | 0.6-0.7 |
Conclusion : Plage de réglage requise = 80-400 N·s/m (rapport de réglage 5:1)
Estimation du coefficient basé sur l'énergie
Approche alternative utilisant l'énergie cinétique :
$$
c \approx \frac{2 \times KE}{v \times course}
$$
Où ?
- KE = Énergie cinétique (joules)
- v = Vitesse d'impact (m/s)
- course = longueur de course de l'absorbeur (m)
Exemple pour une charge de 18 kg :
- KE = 13 joules
- Vitesse = 1,2 m/s
- Course = 0,05 m (absorbeur de 50 mm)
- c ≈ (2 × 13) / (1,2 × 0,05) = 26 / 0,06 = 433 N·s/m
Cette formule simplifiée permet d'obtenir rapidement des estimations pour la sélection d'un absorbeur. 📐
Assistance au calcul Bepto
Chez Bepto, nous fournissons des services de calcul d'amortissement à nos clients :
Notre processus :
- Collecter les données d'application (plage de masse, vitesse, fréquence)
- Calculer la plage de coefficients requise
- Recommander des amortisseurs réglables appropriés
- Fournir les paramètres de réglage initiaux
- Optimisation du domaine de support
Nous avons développé des outils de calcul basés sur des centaines d'installations réussies, garantissant des recommandations précises pour votre application spécifique. 🎯
Quelles méthodes de réglage permettent un contrôle variable de l'amortissement ?
Différents modèles d'amortisseurs offrent différents niveaux de réglage de l'amortissement. 🔧
Le contrôle variable de l'amortissement est obtenu grâce à trois méthodes principales : le réglage manuel de la soupape à pointeau (modifie la taille de l'orifice, plage de 3-5:1, nécessite un arrêt pour le réglage), le réglage par molette rotative (un bouton externe modifie la restriction interne, plage de 5-8:1, réglable pendant le fonctionnement) ou les conceptions à détection automatique de charge (auto-ajustement en fonction de la force d'impact, plage de 8-12:1, aucune intervention manuelle). Le choix dépend de la fréquence de variation de la charge, des exigences en matière d'accessibilité pour le réglage et des contraintes budgétaires, les coûts allant de $80 pour les systèmes manuels à $400+ pour les systèmes automatiques.

Réglage manuel de la soupape à pointeau
Approche traditionnelle et la plus économique :
Caractéristiques de la conception :
- Une soupape à aiguille filetée contrôle la restriction du débit d'huile.
- Réglage type : 10 à 20 tours de la position fermée à la position ouverte
- Nécessite une clé hexagonale ou un tournevis pour le réglage.
- Il faut arrêter le fonctionnement pour régler
Plage de réglage :
- Amortissement minimal : soupape complètement ouverte
- Amortissement maximal : soupape presque fermée (ne jamais fermer complètement)
- Rapport de force typique : 3-5:1
- Précision : répétabilité ±10-15%
Idéal pour :
- Changements de charge peu fréquents (quotidiens ou hebdomadaires)
- Emplacements de montage accessibles
- Applications économiques
- Coût : $80-150 par absorbeur
Réglage externe à cadran rotatif
Plus pratique pour les changements fréquents :
Caractéristiques de la conception :
- Le bouton externe contrôle directement l'amortissement.
- Échelle numérotée (généralement de 1 à 10 ou de 1 à 20)
- Réglable sans outils
- Peut être réglé pendant le fonctionnement (avec précaution)
Plage de réglage :
- Les positions de l'échelle correspondent aux niveaux d'amortissement.
- Rapport de force typique : 5-8:1
- Précision : répétabilité ±5-8%
- Réglage plus rapide qu'une vanne à pointeau
Idéal pour :
- Changements fréquents de charge (toutes les heures ou par équipe)
- Emplacements accessibles à l'opérateur
- Exigences en matière de flexibilité de production
- Coût : $150-280 par absorbeur
Conceptions à détection automatique de charge
Solution haut de gamme pour les charges très variables :
| Fonctionnalité | Réglage automatique hydraulique | Compensation pneumatique | Servo-commandé |
|---|---|---|---|
| Méthode d'ajustement | Soupape sensible à la pression | Piston à ressort | Actionneur électronique |
| Temps de réponse | Instantané | <0,1 seconde | 0,2 à 0,5 seconde |
| Plage de réglage | 8-10:1 | 6-8:1 | 10-15:1 |
| Précision | ±5% | ±8% | ±2% |
| Coût | $280-400 | $200-320 | $500-800 |
| Maintenance | Faible | Moyen | Moyenne-élevée |
Idéal pour :
- Variation continue de la charge (cycle à cycle)
- Opérations sans pilote
- Applications critiques nécessitant une optimisation
- Production à grand volume justifiant l'investissement
Comparaison des mécanismes d'ajustement
Considérations pratiques pour la sélection :
Valve à pointeau manuelle :
- ✅ Coût le plus bas
- ✅ Simple, fiable
- ✅ Aucune alimentation externe requise
- ❌ Nécessite un arrêt pour réglage
- ❌ Portée limitée
- ❌ Réglage fastidieux
Cadran rotatif :
- ✅ Réglage rapide
- ✅ Aucun outil nécessaire
- ✅ Bonne autonomie
- ❌ Coût modéré
- ❌ Le bouton externe peut être heurté.
- ❌ Nécessite toujours une intervention manuelle
Automatique :
- ✅ Aucun réglage manuel nécessaire
- ✅ Optimise chaque cycle
- ✅ Portée maximale
- ❌ Coût le plus élevé
- ❌ Plus complexe
- ❌ Besoins potentiels en matière d'entretien
Pour l'application pharmaceutique de Sarah, qui nécessite des changements fréquents de taille de conteneur (toutes les 15 à 30 minutes), nous avons recommandé des absorbeurs réglables à cadran rotatif, qui permettent un réglage rapide sans arrêter la production, à un coût raisonnable. 💡
Comment régler l'amortissement pour obtenir des performances optimales sur toutes les plages de charge ?
Une méthodologie de réglage systématique garantit des performances optimales dans toutes les conditions de charge. 🎯
Réglez l'amortissement en commençant par les réglages moyens calculés, puis testez les charges minimales et maximales tout en mesurant le temps de stabilisation, le rebond et les forces de décélération maximales. Un réglage optimal permet d'obtenir des temps de stabilisation inférieurs à 0,3 seconde, une amplitude de rebond inférieure à 10% de course et des forces maximales inférieures aux limites structurelles (généralement 500-1000 N). Pour les plages de charge étendues, créez des tableaux de réglage qui établissent une correspondance entre les conditions de charge et les réglages d'amortissement, ce qui permet aux opérateurs d'optimiser rapidement les exigences de production actuelles sans avoir recours à des essais et des erreurs.
Procédure de configuration initiale
Commencez par les paramètres de base calculés :
Étape 1 : Calculer le réglage moyen
- Déterminer la charge moyenne : (Min + Max) / 2
- Calculer le coefficient requis pour la charge moyenne
- Régler l'absorbeur sur la position de réglage correspondante.
- Pour la demande de Sarah : (2 kg + 18 kg) / 2 = 10 kg de référence
Étape 2 : Tester la charge minimale
- Faire fonctionner le cylindre avec la charge la plus légère prévue.
- Observer le comportement de décélération
- Mesurer le temps de stabilisation et le rebond
- En cas de rebond excessif : réduire l'amortissement de 20 à 30%.
Étape 3 : Tester la charge maximale
- Faites fonctionner le cylindre avec la charge la plus lourde prévue.
- Observer le comportement de décélération
- Vérifier s'il y a eu des chocs violents ou une décélération insuffisante.
- Si insuffisant : augmenter l'amortissement 20-30%
Étape 4 : Répéter
- Ajustez les paramètres progressivement.
- Tester les charges intermédiaires
- Documenter les réglages optimaux pour chaque plage de charge
Critères de mesure du rendement
Définir les indicateurs de réussite pour l'optimisation :
| Mesure de la performance | Valeur cible | Méthode de mesure | Fourchette acceptable |
|---|---|---|---|
| Temps d'installation5 | <0,3 secondes | Minuterie ou caméra haute vitesse | 0,2 à 0,4 seconde |
| Amplitude de rebond | <5 mm | Capteur visuel ou de proximité | <10 mm |
| Décélération maximale | 8-15 m/s² | Accéléromètre | 5-20 m/s² |
| Niveau sonore | <75 dB | Sonomètre | <80 dB |
| Précision du positionnement | ±0,2 mm | Système de mesure | ±0,5 mm |
Tableau d'ajustement en fonction de la charge
Créer une référence opérateur pour une optimisation rapide :
Gamme pharmaceutique Sarah – Paramètres d'amortissement :
| Type de conteneur | Masse totale | Réglage de l'amortissement | Position du cadran | Notes |
|---|---|---|---|---|
| Petit flacon | 2 à 4 kg | Minimum | Position 2-3 | Empêcher les rebonds |
| Flacon moyen | 5 à 8 kg | Faible-moyen | Position 4-5 | Équilibré |
| Grand flacon | 9-12 kg | Moyen | Position 6-7 | Standard |
| Petite bouteille | 13-15 kg | Moyenne-élevée | Position 8-9 | Contrôle ferme |
| Grande bouteille | 16-18 kg | Maximum | Position 9-10 | Prévenir les chocs |
Ce tableau a éliminé les approximations et réduit le temps de changement de 15 minutes à moins de 2 minutes. 📋
Techniques de réglage fin
Méthodes d'optimisation avancées :
Technique 1 : Optimisation du temps de stabilisation
- Augmentez progressivement l'amortissement jusqu'à ce que le rebond disparaisse.
- Réduire ensuite 10-15% pour un tassement plus rapide.
- Un léger sous-amortissement (ζ = 0,6-0,7) se stabilise plus rapidement que le niveau critique.
Technique 2 : Vérification de la limite de force
- Installer un capteur de force ou un manomètre
- Mesurer la force de décélération maximale
- Veiller à ce que les forces restent inférieures aux limites structurelles
- Limite typique : 500-800 N pour les vérins standard
Technique 3 : Vérification de l'équilibre énergétique
- Calculer l'apport en énergie cinétique
- Vérifier l'utilisation de la course de l'absorbeur (utiliser 70-90%).
- Sous-utilisation : augmenter l'amortissement
- Surcharge (toucher le fond) : réduire l'amortissement ou ajouter une capacité d'absorption.
Systèmes de réglage automatisés
Pour les applications à forte valeur ajoutée, envisagez l'optimisation automatisée :
Amortisseurs à servocommande :
- Les capteurs de charge détectent la masse d'impact.
- Le contrôleur calcule l'amortissement optimal.
- Le servomoteur ajuste l'amortissement en temps réel.
- Coût : $500-800 par absorbeur
- Retour sur investissement : 6 à 18 mois dans les applications à haut volume
Solution d'amortissement intelligent Bepto :
Nous développons des amortisseurs intelligents avec :
- Détection de charge intégrée
- Optimisation basée sur un microcontrôleur
- Algorithmes d'auto-apprentissage
- Capacité de surveillance à distance
- Date de sortie prévue : troisième trimestre 2026 🚀
Résultats de l'accordage de Sarah
Après avoir systématiquement optimisé sa gamme pharmaceutique en Caroline du Nord :
Amélioration des performances :
- Temps de stabilisation : réduit de 0,5-0,8 s à 0,15-0,25 s (amélioration de 70%)
- Rebond : éliminé sur toutes les tailles de conteneurs
- Dégâts infligés aux objets : réduits de 2,11 TP3T à 0,31 TP3T (réduction de 861 TP3T)
- Temps de commutation : réduit de 15 min à <2 min (réduction de 87%)
- Efficacité de la ligne : augmentation de 121 TP3T grâce à une stabilisation plus rapide
Impact financier :
- Économies réalisées grâce à la réduction des dommages causés aux produits : $48 000/an
- Valeur de l'amélioration de l'efficacité : $35 000/an
- Investissement absorbé : $4 200 (14 unités × $300)
- Période de récupération : 18 jours 💰
La clé résidait dans un calcul systématique, une sélection adéquate des absorbeurs et un réglage méthodique sur toute la plage de charge.
Conclusion
Les coefficients d'amortissement des amortisseurs sont des paramètres de réglage essentiels pour les systèmes pneumatiques à charge variable. Ils déterminent si vos vérins offrent des performances constantes ou s'ils sont soumis à des rebonds et des chocs lors des variations de charge. En calculant les coefficients requis pour votre plage de charge, en sélectionnant des amortisseurs réglables de manière appropriée et en effectuant un réglage systématique pour obtenir des performances optimales, vous pouvez obtenir un fonctionnement rapide, précis et fiable, quelles que soient les variations de charge. Chez Bepto, nous fournissons l'expertise technique, l'aide au calcul et des amortisseurs réglables de qualité pour optimiser vos applications à charge variable et obtenir des performances et une fiabilité maximales.
FAQ sur l'amortissement des amortisseurs
Quelle est la différence entre le coefficient d'amortissement et le rapport d'amortissement ?
Le coefficient d'amortissement (c) est la force absolue par unité de vitesse mesurée en N·s/m, tandis que le rapport d'amortissement (ζ) est le rapport sans dimension entre l'amortissement réel et l'amortissement critique, exprimé en pourcentage ou en décimale (ζ = c / c_critique). Le coefficient est la propriété physique de l'absorbeur, tandis que le rapport décrit le comportement du système. Par exemple, c = 200 N·s/m peut représenter ζ = 0,7 (70% de critique) pour une masse, mais ζ = 0,4 pour une autre masse. Les ingénieurs utilisent le coefficient pour sélectionner l'absorbeur et le rapport pour prédire la réponse du système.
Quelle plage de réglage vous faut-il pour les applications à charge variable ?
La plage de réglage requise correspond au rapport entre l'énergie cinétique maximale et minimale, généralement de 3 à 5:1 pour une variation modérée (plage de masse de 2:1) ou de 8 à 12:1 pour une variation importante (plage de masse de 4:1+). Calculez en déterminant l'énergie cinétique (KE) pour les charges les plus légères et les plus lourdes : si l'énergie cinétique minimale est de 3 J et l'énergie cinétique maximale de 27 J, vous avez besoin d'une plage de réglage de 9:1. Ajoutez une marge de 20-30% pour les variations de vitesse et les tolérances des composants. Bepto propose des amortisseurs réglables avec des plages de 5:1 (standard), 8:1 (améliorée) et 12:1 (premium) pour s'adapter à différentes applications.
Peut-on utiliser plusieurs amortisseurs pour augmenter la capacité ?
Oui, plusieurs absorbeurs en parallèle multiplient la capacité tout en faisant la moyenne des coefficients d'amortissement : deux absorbeurs identiques fournissent une capacité énergétique deux fois supérieure avec le même coefficient, ou différents réglages peuvent être utilisés pour créer des profils d'amortissement personnalisés. Par exemple, la combinaison d'amortisseurs souples (c = 100) et rigides (c = 300) crée un amortissement progressif : les charges légères compriment uniquement l'amortisseur souple, tandis que les charges lourdes sollicitent les deux pour un c combiné de 400. Cette technique convient aux applications présentant des variations de charge extrêmes. Assurez-vous que les amortisseurs sont correctement alignés et synchronisés pour une répartition uniforme de la charge.
À quelle fréquence faut-il régler les paramètres d'amortissement pour des charges variables ?
La fréquence de réglage dépend de la fréquence des changements de charge et des exigences de performance : réglez chaque commutation pour une performance optimale (opération de 2 à 5 minutes avec le cadran rotatif) ou utilisez des réglages intermédiaires pour des charges similaires si les commutations sont très fréquentes. Pour les charges variant dans une plage de 2:1, un réglage unique à mi-course offre souvent des performances acceptables. Pour les charges variant au-delà de 3:1, le réglage améliore considérablement les performances et réduit l'usure des composants. Les amortisseurs à détection automatique de charge éliminent le réglage manuel pour les variations d'un cycle à l'autre.
Qu'est-ce qui fait que les amortisseurs perdent leur force d'amortissement au fil du temps ?
La dégradation de la force d'amortissement résulte de l'usure des joints, qui entraîne des fuites internes (cas le plus fréquent), de la contamination du fluide d'amortissement, de l'usure des composants de dosage internes ou de la perte de charge de gaz dans les modèles à ressort à gaz. Elle survient généralement après 500 000 à 2 000 000 de cycles, selon la qualité et la sévérité de la charge. Les symptômes comprennent un temps de stabilisation accru, la réapparition du rebond et une réduction de la force maximale. Les amortisseurs de qualité, tels que ceux de Bepto, comprennent des kits de joints remplaçables ($25-60) qui prolongent leur durée de vie, tandis que les amortisseurs économiques doivent être remplacés dans leur intégralité ($80-150). Un réglage initial approprié (évitant une compression excessive) prolonge la durée de vie de 2 à 3 fois en réduisant les contraintes internes.
-
Découvrez la physique de l'amortissement visqueux, où la force est proportionnelle à la vitesse. ↩
-
Réviser le concept physique fondamental de l'énergie possédée par un objet en raison de son mouvement. ↩
-
Comprendre le niveau d'amortissement spécifique qui ramène un système à l'équilibre dans les plus brefs délais sans oscillation. ↩
-
Découvrez le paramètre sans dimension qui décrit comment les oscillations d'un système s'atténuent. ↩
-
Découvrez le temps nécessaire pour qu'un système réponde en restant dans une bande d'erreur spécifiée. ↩
