

Isteresi1 è l'invisibile killer della precisione che si nasconde in ogni sistema di attuatori proporzionali, distruggendo silenziosamente la precisione di posizionamento fino a 15%, mentre gli ingegneri danno la colpa a tutto tranne che al vero colpevole. Questo fenomeno fa sì che gli attuatori “ricordino” le loro posizioni precedenti, creando zone morte imprevedibili che trasformano il controllo fluido in una frustrante inconsistenza. 😠
L'isteresi nel controllo proporzionale dell'attuatore crea errori di posizionamento pari a 2-15% della corsa completa dovuti a gioco meccanico, attrito delle guarnizioni, effetti magnetici e bande morte della valvola di controllo, che richiedono una compensazione tramite algoritmi software, precarico meccanico, feedback ad alta risoluzione e una corretta selezione dei componenti per ottenere una precisione di posizionamento inferiore a 1%.
Due mesi fa ho lavorato con Jennifer, ingegnere di controllo presso uno stabilimento di produzione aerospaziale a Seattle, i cui robot di assemblaggio di precisione mancavano costantemente il bersaglio di 3 mm, non in modo casuale, ma secondo uno schema prevedibile che indicava chiaramente la presenza di isteresi. Dopo aver implementato le nostre soluzioni anti-isteresi Bepto, i suoi errori di posizionamento sono scesi a meno di 0,5 mm. ✈️
Indice dei contenuti
- Che cos'è esattamente l'isteresi e perché si verifica negli attuatori proporzionali?
- In che modo l'isteresi influisce sui diversi tipi di sistemi di controllo proporzionale?
- Quali tecniche di misurazione consentono di identificare e quantificare al meglio gli effetti di isteresi?
- Quali sono i metodi più efficaci per ridurre al minimo l'isteresi nel vostro sistema?
Che cos'è esattamente l'isteresi e perché si verifica negli attuatori proporzionali?
Comprendere i meccanismi di isteresi è essenziale per ottenere un controllo proporzionale preciso nei sistemi di attuatori pneumatici e idraulici.
L'isteresi si verifica quando la posizione di uscita dell'attuatore dipende sia dal comando di ingresso corrente che dalla cronologia delle posizioni precedenti, creando percorsi di risposta diversi per i comandi di aumento e diminuzione a causa del gioco meccanico, delle forze di attrito, degli effetti magnetici e delle bande morte della valvola di controllo che si accumulano durante il ciclo di controllo.
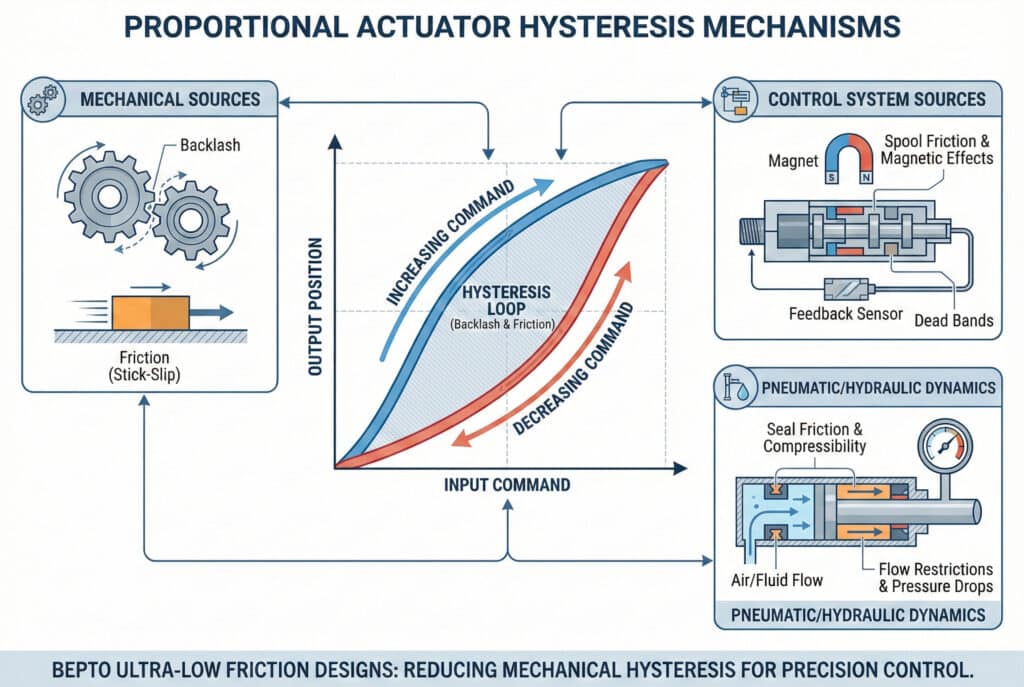
Meccanismi fondamentali dell'isteresi
Fonti meccaniche
I componenti fisici contribuiscono in modo significativo all'isteresi del sistema:
- Colpo di scena2: I treni di ingranaggi, gli accoppiamenti e i collegamenti creano zone morte
- Attrito: Le differenze tra attrito statico e cinetico causano il comportamento stick-slip
- Conformità: Deformazione elastica nei collegamenti meccanici
- Modelli di usura: L'usura dei componenti crea superfici di contatto irregolari
Fonti del sistema di controllo
Gli elementi di controllo elettronici e pneumatici aggiungono isteresi:
| Tipo di componente | Isteresi tipica | Causa primaria | Strategia di mitigazione |
|---|---|---|---|
| Servovalvole | 0.1-0.5% | Attrito della bobina | Dither ad alta frequenza |
| Valvole proporzionali3 | 0.5-2% | Isteresi magnetica | Compensazione del feedback |
| Sensori di posizione | 0.05-0.2% | Rumore elettronico | Filtraggio del segnale |
| Amplificatori | 0.1-0.3% | Impostazioni della banda morta | Regolazione della calibrazione |
Origini fisiche nei sistemi pneumatici
Effetti dell'attrito delle guarnizioni
Le guarnizioni pneumatiche creano significative fonti di isteresi:
- Attrito di stacco: Forza maggiore necessaria per avviare il movimento
- Attrito di scorrimento: Forza inferiore durante il movimento continuo
- comportamento stick-slip4: Movimento irregolare a basse velocità
- Dipendenza dalla temperatura: L'attrito varia con la temperatura di esercizio
Dinamica della pressione
Gli effetti della pressione del sistema pneumatico contribuiscono all'isteresi:
- Compressibilità: La compressione dell'aria crea un comportamento simile a quello di una molla
- Limitazioni di flusso: Le restrizioni relative alle valvole e ai raccordi causano ritardi
- Cadute di pressione: Le perdite di linea creano forze dipendenti dalla posizione
- Effetti della temperatura: L'espansione termica influisce sulla rigidità del sistema
Noi di Bepto abbiamo progettato i nostri cilindri senza stelo con guarnizioni a bassissimo attrito e sistemi di guida lavorati con precisione che riducono l'isteresi meccanica del 60% rispetto ai modelli standard, un fattore fondamentale per le applicazioni di controllo proporzionale ad alta precisione. 🎯
Isteresi dipendente dal carico
Effetti del carico variabile
I carichi esterni influenzano in modo significativo le caratteristiche di isteresi:
- Carichi gravitazionali: Variazioni di forza dipendenti dalla posizione
- Carichi inerziali: Requisiti di forza dipendenti dall'accelerazione
- Carichi di processo: Forze esterne variabili durante il funzionamento
- Carichi di attrito: Variazioni della forza di contatto superficiale
Interazioni dinamiche dei carichi
I carichi in movimento creano complessi modelli di isteresi:
- Effetti dell'accelerazione: Forze inerziali durante i cambiamenti di velocità
- Accoppiamento a vibrazione: Le vibrazioni esterne influenzano il posizionamento
- Interazioni di risonanza: Eccitazione della frequenza naturale
- Variazioni di smorzamento: Caratteristiche di smorzamento dipendenti dal carico
In che modo l'isteresi influisce sui diversi tipi di sistemi di controllo proporzionale?
Gli effetti di isteresi variano in modo significativo a seconda delle diverse tecnologie degli attuatori e delle architetture di controllo, richiedendo strategie di compensazione personalizzate.
I sistemi proporzionali a ciclo aperto presentano errori di isteresi compresi tra 5 e 151 TP3T senza possibilità di correzione, mentre i sistemi a ciclo chiuso possono ridurre l'isteresi a 0,5-21 TP3T attraverso la compensazione di retroazione. I sistemi servo avanzati raggiungono una precisione inferiore a 0,11 TP3T utilizzando encoder ad alta risoluzione e sofisticati algoritmi di controllo.
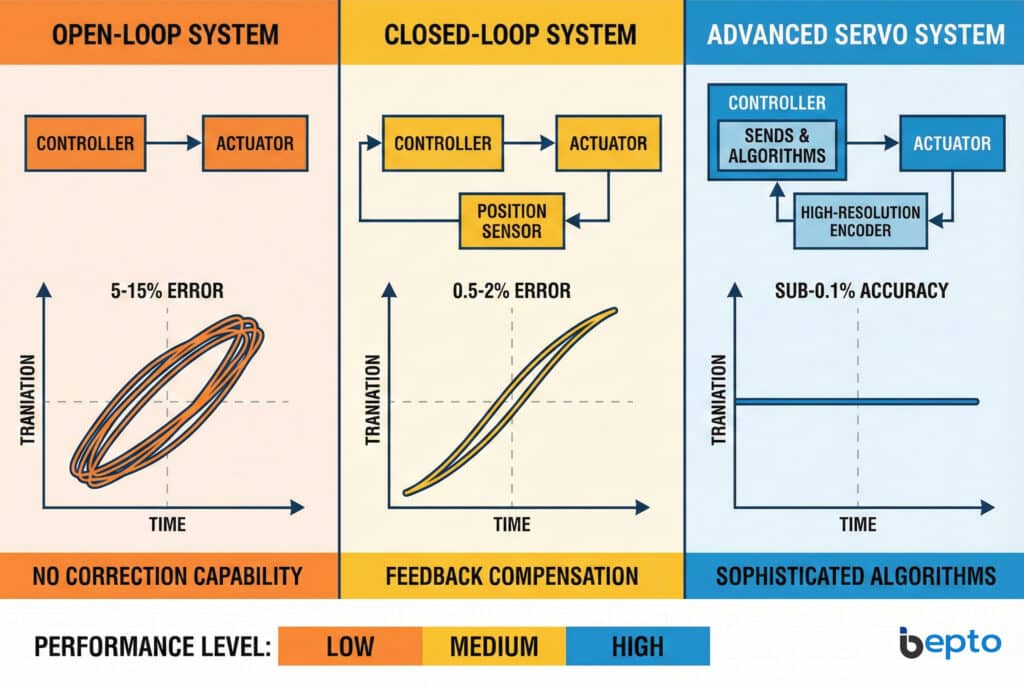
Sistemi di controllo a ciclo aperto
Limiti intrinseci
I sistemi a ciclo aperto non sono in grado di compensare gli effetti di isteresi:
- Nessuna correzione del feedback: Gli errori si accumulano senza essere rilevati
- Modelli prevedibili: L'isteresi crea errori di posizionamento ripetibili
- Sensibilità alla temperatura: Le prestazioni variano a seconda delle condizioni operative.
- Dipendenza dal carico: Carichi diversi creano modelli di isteresi diversi
Caratteristiche prestazionali tipiche
Le prestazioni dell'isteresi del sistema a ciclo aperto variano a seconda dell'applicazione:
| Tipo di applicazione | Gamma di isteresi | Usi accettabili | Limiti prestazionali |
|---|---|---|---|
| Posizionamento semplice | 5-15% | Attività non critiche | Scarsa ripetibilità |
| Controllo della velocità | 3-8% | Regolazione approssimativa della velocità | Prestazioni variabili |
| Controllo della forza | 10-25% | Applicazioni di forza di base | Output incoerente |
| Sistemi multiasse | 8-20% | Automazione semplice | Errori cumulativi |
Sistemi di controllo a circuito chiuso
Benefici della compensazione del feedback
I sistemi a circuito chiuso possono compensare attivamente l'isteresi:
- Rilevamento degli errori: Monitoraggio continuo della posizione
- Correzione in tempo reale: Risposta immediata agli errori di posizionamento
- Controllo adattivo: Gli algoritmi di apprendimento migliorano le prestazioni
- Rifiuto dei disturbi: Compensazione della forza esterna
Efficacia dell'algoritmo di controllo
Diverse strategie di controllo gestiscono l'isteresi con risultati variabili:
- Controllo PID5: Compensazione di base, isteresi residua 2-5%
- Controllo feedforward: Compensazione predittiva, residuo 1-3%
- Controllo adattivo: Compensazione dell'apprendimento, residuo 0,5-2%
- Controllo basato su modelli: Compensazione teorica, residuo 0,1-1%
Sistemi di controllo servoassistito
Tecniche avanzate di compensazione
I servosistemi ad alte prestazioni utilizzano una sofisticata compensazione dell'isteresi:
- Mappatura dell'isteresi: Caratterizzazione del sistema e tabelle di compensazione
- Tecniche di precarico: Precarico meccanico per eliminare le zone morte
- Segnali di dithering: Eccitazione ad alta frequenza per superare l'attrito
- Algoritmi predittivi: Previsione dell'isteresi basata su modelli
Michael, ingegnere robotico presso uno stabilimento di produzione di precisione nella Carolina del Nord, ha implementato gli aggiornamenti del servocomando da noi consigliati sulla sua linea di assemblaggio. La precisione di posizionamento è migliorata da ±2,5 mm a ±0,3 mm, riducendo i difetti dei prodotti del 75% e risparmiando $50.000 al mese in costi di rilavorazione. 🤖
Sfide dei sistemi multiasse
Effetti cumulativi
I problemi di isteresi composti da attuatori multipli:
- Accumulo di errori: Errori individuali degli assi combinati
- Effetti di accoppiamento: Le interazioni tra gli assi creano modelli complessi
- Problemi di sincronizzazione: Diversi modelli di isteresi causano problemi di coordinamento
- Complessità della calibrazione: I sistemi multipli richiedono una regolazione individuale
Strategie di coordinamento
I sistemi multiasse avanzati utilizzano tecniche specializzate:
- Controllo master-slave: Un asse guida, gli altri seguono
- Compensazione dell'accoppiamento incrociato: Correzione dell'interazione degli assi
- Posizionamento sincronizzato: Profili di movimento coordinati
- Ottimizzazione globale: Ottimizzazione delle prestazioni a livello di sistema
Quali tecniche di misurazione consentono di identificare e quantificare al meglio gli effetti di isteresi?
Una misurazione accurata dell'isteresi e la sua caratterizzazione consentono lo sviluppo di strategie di compensazione efficaci e l'ottimizzazione del sistema.
La misurazione dell'isteresi richiede test di posizionamento bidirezionali con encoder ad alta risoluzione, la registrazione delle relazioni tra posizione e comando attraverso cicli completi, l'analisi dell'ampiezza del loop e dei modelli di asimmetria e la documentazione delle dipendenze da temperatura e carico per creare mappe di compensazione complete per prestazioni di controllo ottimali.
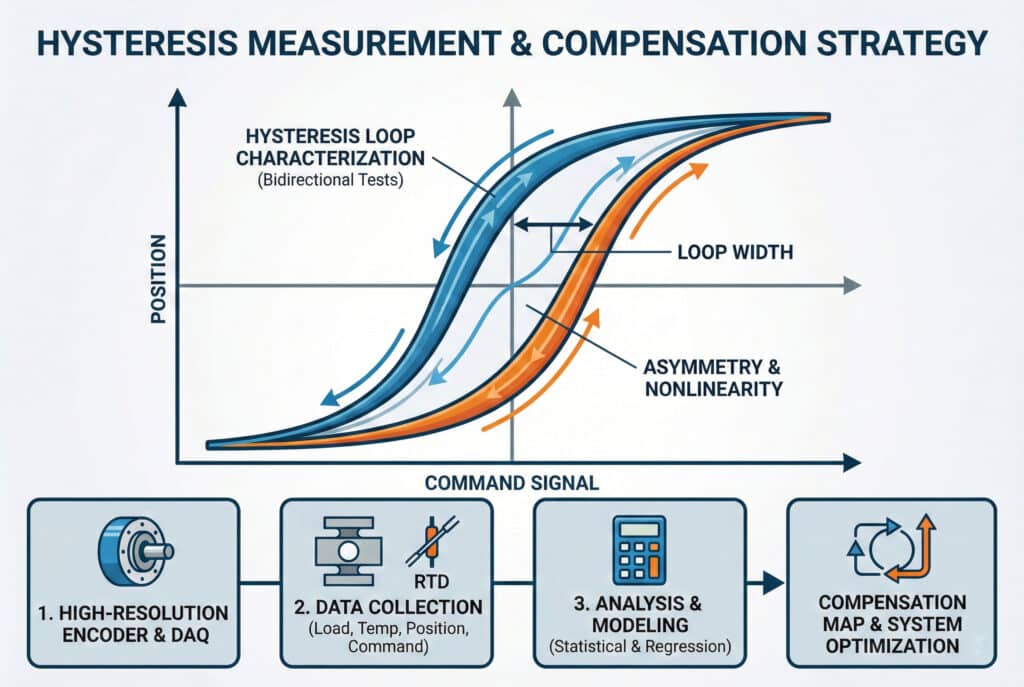
Protocolli di misurazione standard
Test di posizionamento bidirezionale
Una caratterizzazione completa dell'isteresi richiede test sistematici:
- Cicli completi: Sequenze complete di estensione e retrazione
- Velocità multiple: Vari profili di velocità per identificare le dipendenze dal tasso
- Variazioni di carico: Carichi esterni diversi per mappare gli effetti del carico
- Intervalli di temperatura: Valutazione dell'impatto della temperatura di esercizio
Requisiti per la raccolta dei dati
Una misurazione accurata dell'isteresi richiede strumenti di alta qualità:
| Parametro di misurazione | Risoluzione richiesta | Attrezzatura tipica | Obiettivo di precisione |
|---|---|---|---|
| Feedback sulla posizione | 0,011 TP3T di corsa | Encoder lineare | ±0,0051 TP3T |
| Segnale di comando | Minimo 12 bit | sistema DAQ | ±0,1% |
| Misurazione del carico | 1% di forza nominale | Cella di carico | ±0,5% |
| Temperatura | ±1°C | Sensore RTD | ±0.5°C |
Tecniche di analisi
Caratterizzazione del ciclo di isteresi
L'analisi matematica rivela caratteristiche di isteresi:
- Larghezza del ciclo: Differenza massima di posizione a parità di comando
- Asimmetria: Distorsione direzionale negli errori di posizionamento
- Non linearità: Deviazione dalla risposta lineare ideale
- Ripetibilità: Coerenza tra più cicli
Metodi di analisi statistica
Tecniche di analisi avanzate quantificano gli effetti di isteresi:
- Deviazione standard: Misurazione della ripetibilità del posizionamento
- Analisi di correlazione: Forza della relazione input-output
- Analisi di frequenza: Caratteristiche di risposta dinamica
- Analisi di regressione: Sviluppo di modelli matematici
Sistemi di monitoraggio in tempo reale
Monitoraggio continuo dell'isteresi
I sistemi di produzione traggono vantaggio dal monitoraggio continuo dell'isteresi:
- Sensori integrati: Sistemi di feedback di posizione integrati
- Registrazione dei dati: Registrazione continua delle prestazioni
- Analisi delle tendenze: Monitoraggio del degrado delle prestazioni a lungo termine
- Manutenzione predittiva: Allarme preventivo dell'usura dei componenti
I nostri sistemi diagnostici Bepto includono il monitoraggio in tempo reale dell'isteresi che avvisa gli operatori quando gli errori di posizionamento superano le soglie di 0,5%, consentendo una manutenzione proattiva prima che la precisione si riduca a livelli inaccettabili. 📊
Valutazione dell'impatto ambientale
Effetti della temperatura
La temperatura influenza in modo significativo le caratteristiche di isteresi:
- Espansione termica: Modifiche delle dimensioni meccaniche
- Variazioni di viscosità: Variazioni delle proprietà dei fluidi
- Proprietà del materiale: Dipendenza della temperatura dal modulo elastico
- Prestazioni delle guarnizioni: Variazioni del coefficiente di attrito
Analisi della dipendenza dal carico
I carichi esterni creano complessi modelli di isteresi:
- Carichi statici: Effetti della forza costante sul posizionamento
- Carichi dinamici: Impatto a forza variabile durante il movimento
- Effetti inerziali: Errori di posizionamento dipendenti dall'accelerazione
- Variazioni di attrito: Influenza delle condizioni della superficie sulle prestazioni
Quali sono i metodi più efficaci per ridurre al minimo l'isteresi nel vostro sistema?
L'implementazione di strategie complete di riduzione dell'isteresi consente di ottenere una precisione di posizionamento inferiore a 1% in applicazioni di controllo proporzionale particolarmente esigenti.
L'efficace minimizzazione dell'isteresi combina miglioramenti meccanici, tra cui componenti a basso attrito ed eliminazione del gioco, potenziamenti del sistema di controllo con compensazione feedforward e algoritmi adattivi, oltre a controlli ambientali per la stabilità della temperatura e del carico, riducendo tipicamente l'isteresi da 5-15% a meno di 1% del fondo scala.
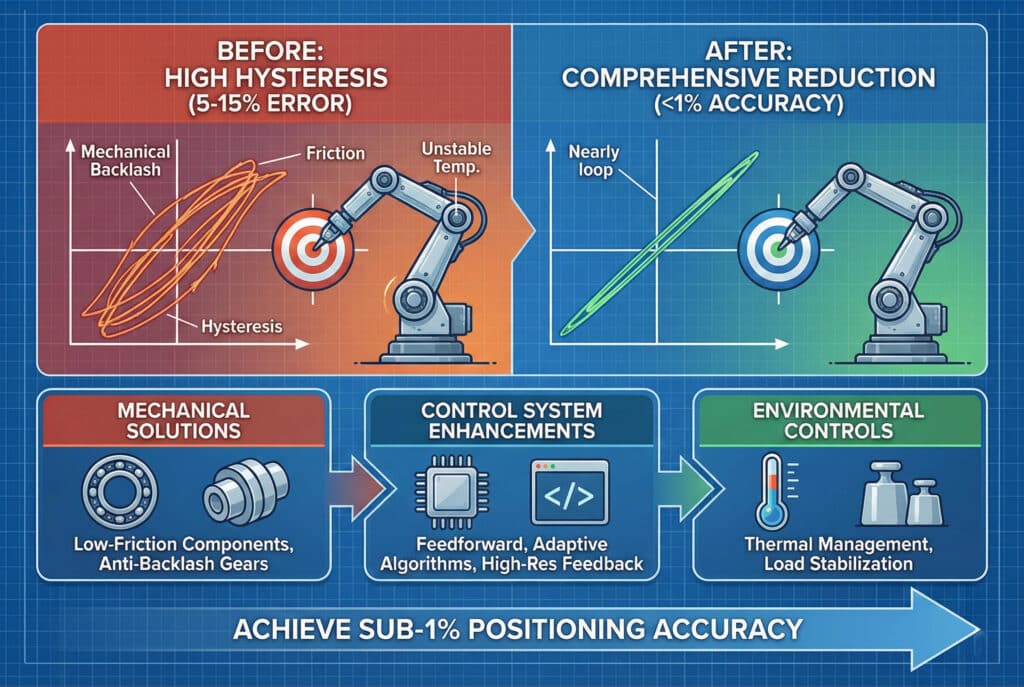
Soluzioni meccaniche
Selezione e progettazione dei componenti
Scegli componenti progettati specificamente per una bassa isteresi:
- Cuscinetti di precisione: Guide lineari di alta qualità con gioco minimo
- Guarnizioni a basso attrito: Materiali e design avanzati per guarnizioni
- Giunti rigidi: Eliminare le fonti di gioco meccanico
- Sistemi precaricati: Precarico meccanico per eliminare le zone morte
Miglioramenti all'architettura di sistema
Progettare sistemi meccanici per ridurre al minimo le fonti di isteresi:
| Caratteristica del design | Riduzione dell'isteresi | Costo di implementazione | Impatto della manutenzione |
|---|---|---|---|
| Azionamento diretto | 80-90% | Alto | Basso |
| Guide precaricate | 60-70% | Medio | Medio |
| Giunti di precisione | 40-50% | Basso | Basso |
| Ingranaggi antiritorno | 70-80% | Medio | Alto |
Miglioramenti del sistema di controllo
Tecniche di compensazione software
Gli algoritmi di controllo avanzati possono ridurre significativamente gli effetti di isteresi:
- Mappatura dell'isteresi: Tabelle di ricerca per la correzione della posizione
- Controllo feedforward: Compensazione predittiva basata sulla direzione del comando
- Algoritmi adattivi: Compensazione dell'isteresi con autoapprendimento
- Controllo basato su modelli: Previsione dell'isteresi basata sulla fisica
Miglioramenti al sistema di feedback
I sistemi di feedback potenziati consentono una migliore compensazione dell'isteresi:
- Encoder ad alta risoluzione: Miglioramento della precisione nella misurazione della posizione
- Sensori di feedback multipli: Misurazione ridondante della posizione
- Feedback sulla velocità: Algoritmi di compensazione basati sul tasso
- Force feedback: Compensazione dell'isteresi dipendente dal carico
Strategie di controllo ambientale
Gestione della temperatura
Le temperature di esercizio stabili riducono le variazioni di isteresi:
- Isolamento termico: Proteggere gli attuatori dagli sbalzi di temperatura
- Raffreddamento attivo: Mantenere temperature di esercizio costanti
- Compensazione della temperatura: Correzione software degli effetti termici
- Precondizionamento termico: Consentire ai sistemi di raggiungere l'equilibrio termico
Stabilizzazione del carico
Condizioni di carico costanti riducono al minimo le variazioni di isteresi:
- Isolamento del carico: Disaccoppiare i disturbi esterni
- Controbalancamento: Ridurre gli effetti del carico gravitazionale
- Smorzamento delle vibrazioni: Ridurre al minimo le variazioni dinamiche del carico
- Ottimizzazione dei processi: Ridurre le forze esterne variabili
Sarah, ingegnere di processo presso uno stabilimento di confezionamento farmaceutico in Colorado, ha implementato il nostro programma completo di riduzione dell'isteresi. La precisione del conteggio delle compresse è migliorata da 98,5% a 99,8%, soddisfacendo i requisiti della FDA e riducendo gli sprechi di $25.000 al mese. 💊
Tecniche avanzate di compensazione
Applicazione del segnale di dithering
L'eccitazione ad alta frequenza può superare l'isteresi dovuta all'attrito:
- Selezione della frequenza: Scegliere frequenze superiori alla larghezza di banda del sistema
- Ottimizzazione dell'ampiezza: Equilibrare l'efficacia con la stabilità del sistema
- Progettazione della forma d'onda: Segnali sinusoidali, triangolari o casuali
- Metodi di attuazione: Generazione hardware o software
Metodi di controllo predittivo
Gli approcci basati su modelli offrono una compensazione dell'isteresi superiore:
- Identificazione del sistema: Sviluppo di modelli matematici
- Filtraggio di Kalman: Stima dello stato ottimale
- Controllo predittivo del modello: Ottimizzazione dello stato futuro
- Modellizzazione adattiva: Aggiornamenti in tempo reale dei parametri del modello
Manutenzione e calibrazione
Procedure di calibrazione periodica
La calibrazione sistematica mantiene basse le prestazioni di isteresi:
- Mappatura periodica dell'isteresi: Documentare le modifiche alle prestazioni
- Ispezione dei componenti: Identificare il degrado dovuto all'usura
- Manutenzione della lubrificazione: Mantenere livelli di attrito ottimali
- Verifica dell'allineamento: Garantire la precisione meccanica
Strategie di manutenzione predittiva
La manutenzione proattiva previene il degrado da isteresi:
- Andamento delle prestazioni: Monitorare i cambiamenti dell'isteresi nel tempo
- Monitoraggio della durata dei componenti: Sostituire i componenti prima del guasto
- Monitoraggio delle condizioni: Valutazione continua dello stato di salute del sistema
- Sostituzione preventiva: Pianificare la manutenzione in base all'utilizzo
Alla Bepto, i nostri pacchetti di riduzione dell'isteresi consentono in genere un miglioramento della precisione di posizionamento pari a 70-85%, con molti clienti che segnalano livelli di isteresi inferiori a 0,5% nelle loro applicazioni più esigenti: prestazioni che si traducono direttamente in una maggiore qualità del prodotto e una riduzione degli scarti. 🎯
Conclusione
Comprendere e controllare l'isteresi è essenziale per ottenere un controllo proporzionale preciso dell'attuatore, che richiede misurazioni sistematiche, compensazioni mirate e una manutenzione continua per garantire prestazioni ottimali.
Domande frequenti sull'isteresi nel controllo degli attuatori proporzionali
D: Qual è il valore di isteresi considerato accettabile nei sistemi di attuatori proporzionali?
L'isteresi accettabile dipende dai requisiti dell'applicazione: l'automazione generale tollera valori compresi tra 2 e 51 TP3T, l'assemblaggio di precisione richiede valori inferiori a 11 TP3T, mentre le applicazioni di ultraprecisione richiedono livelli di isteresi inferiori a 0,51 TP3T. I nostri sistemi Bepto raggiungono in genere un'isteresi compresa tra 0,3 e 0,81 TP3T con una corretta implementazione.
D: Il software di compensazione può eliminare completamente l'isteresi meccanica?
La compensazione software può ridurre l'isteresi del 60-80%, ma non può eliminare completamente le cause meccaniche quali il gioco e l'attrito. Combinando miglioramenti meccanici e compensazione software si ottengono i risultati migliori, con un'isteresi totale del sistema solitamente inferiore a 1%.
D: Con quale frequenza devo ricalibrare il mio sistema di controllo proporzionale per l'isteresi?
La frequenza della calibrazione dipende dall'intensità di utilizzo e dai requisiti di precisione: i sistemi ad alta precisione richiedono una calibrazione mensile, le applicazioni generiche richiedono controlli trimestrali, mentre i sistemi a bassa precisione possono essere sottoposti a calibrazioni annuali con monitoraggio continuo delle prestazioni.
D: Qual è la differenza tra isteresi e gioco nei sistemi di attuatori?
Il gioco meccanico è il gioco meccanico presente nei collegamenti e negli ingranaggi, mentre l'isteresi comprende tutti gli effetti dipendenti dalla posizione, inclusi l'attrito, gli effetti magnetici e le bande morte del sistema di controllo. Il gioco meccanico è una componente dell'isteresi totale del sistema.
D: Come faccio a sapere se l'isteresi è la causa dei miei problemi di posizionamento?
L'isteresi crea modelli caratteristici: errori di posizionamento costanti che dipendono dalla direzione di avvicinamento, precisione diversa quando ci si sposta verso l'alto rispetto a quando ci si sposta verso il basso e modelli di errore ripetibili. I test di posizionamento bidirezionali rivelano cicli di isteresi che confermano la diagnosi.
-
Scopri i principi fisici dell'isteresi e il suo impatto sulla precisione in diverse discipline ingegneristiche. ↩
-
Comprendere le cause e le soluzioni ingegneristiche per eliminare il gioco nei collegamenti meccanici. ↩
-
Esplora i meccanismi interni e i principi di funzionamento delle valvole di controllo pneumatiche proporzionali. ↩
-
Scopri i meccanismi alla base del fenomeno dello stick-slip e come influisce sul movimento degli attuatori a bassa velocità. ↩
-
Acquisisci una comprensione più approfondita della teoria del controllo PID e della sua applicazione nell'automazione industriale. ↩
