

I cilindri standard a due posizioni limitano la flessibilità dell'automazione, costringendo gli ingegneri a utilizzare sistemi meccanici complessi o costosi. soluzioni servo1aumentando i costi di 200-400% e la complessità della manutenzione. I cilindri multiposizione raggiungono arresti intermedi attraverso fermi meccanici, sequenze pneumatiche o sistemi elettronici di controllo della posizione che posizionano con precisione il pistone in posizioni predeterminate lungo la lunghezza della corsa, consentendo complesse sequenze di automazione con singoli attuatori. La scorsa settimana ho aiutato Marcus, un ingegnere dell'imballaggio del Wisconsin, il cui sistema di smistamento necessitava di tre posizioni distinte, ma era alle prese con la complessità e il costo della disposizione di più cilindri. 🎯
Indice dei contenuti
- Quali sono i diversi tipi di tecnologie per cilindri multiposizione?
- In che modo i sistemi di ritenuta meccanica forniscono un controllo affidabile della posizione?
- Perché i cilindri multiposizione Bepto sono la scelta intelligente per l'automazione complessa?
Quali sono i diversi tipi di tecnologie per cilindri multiposizione?
La comprensione delle varie tecnologie di cilindri multiposizione aiuta i progettisti a scegliere la soluzione ottimale per i loro specifici requisiti di automazione e di precisione.
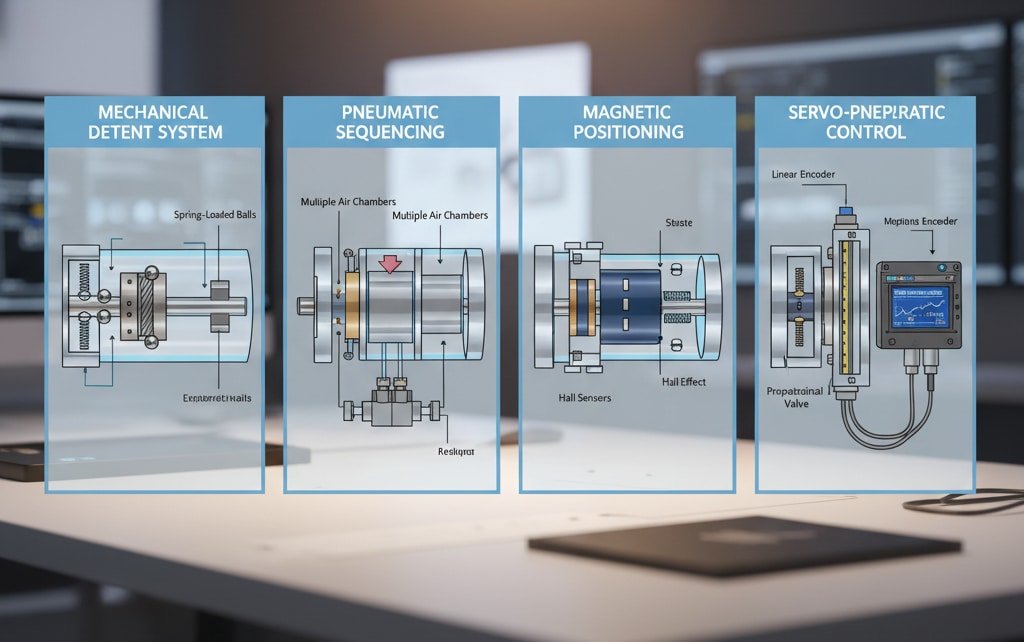
I cilindri multiposizione utilizzano sistemi di fermo meccanico con sfere caricate a molla, sequenze pneumatiche con camere d'aria multiple, posizionamento magnetico con sensori di Hall o controllo servo-pneumatico con feedback elettronico per ottenere arresti intermedi precisi lungo la corsa del cilindro.
Sistemi di ritenuta meccanica
Rilevamenti a sfera con carica a molla:
- Scanalature di precisione nello stelo del pistone
- Le sfere caricate a molla si innestano nelle posizioni di fermo
- Possibilità di comando meccanico per il funzionamento di emergenza
- Non è necessaria alcuna alimentazione esterna per il mantenimento della posizione
Rilevamenti a camme:
- Il meccanismo a camme rotanti controlla la selezione della posizione
- Posizioni di blocco multiple per giro
- Elevata capacità di tenuta
- Adatto per applicazioni pesanti
Fermagli a cuneo:
- Elementi a cuneo affusolati per il posizionamento
- Il design autobloccante impedisce la deriva
- Alta precisione e ripetibilità
- Design compatto per applicazioni con limiti di spazio
Sistemi di sequenziamento pneumatici
Design multi-camera:
- Camere d'aria separate per ogni posizione
- Controllo sequenziale della valvola per la selezione della posizione
- Controllo indipendente della pressione per ogni camera
- Transizioni fluide tra le posizioni
Sequenziamento pilotato:
- Piccoli cilindri pilota controllano le posizioni dei cilindri principali
- Consumo d'aria ridotto rispetto alla multicamera
- Tempi di risposta più rapidi
- Costo inferiore rispetto ai sistemi multicamera completi
Controllo elettronico della posizione
| Tipo di tecnologia | Precisione della posizione | Tempo di risposta | Requisiti di alimentazione | Applicazioni tipiche |
|---|---|---|---|---|
| Fermo meccanico | ±0,1 mm | 0,5-1,0 secondi | Nessuno | Montaggio, smistamento |
| Sequenza pneumatica | ±0,5 mm | 0,3-0,8 secondi | Aria compressa | Movimentazione dei materiali |
| Posizione magnetica | ±0,05 mm | 0,2-0,5 secondi | 24 V CC | Assemblaggio di precisione |
| Servo-pneumatico | ±0,01 mm | 0,1-0,3 secondi | 24 V CC + feedback | Applicazioni di alta precisione |
Tecnologia di posizionamento magnetico
- Rilevamento della posizione senza contatto
- Obiettivi magnetici multipli sul pistone
- Verifica elettronica della posizione
- Punti di posizione programmabili
Schiere di interruttori Reed:
- Semplice rilevamento della posizione on/off
- Interruttori multipli lungo la lunghezza del cilindro
- Economico per il posizionamento di base
- Affidabile in ambienti difficili
Integrazione servo-pneumatica
Sistemi di retroazione della posizione:
- Encoder lineari3 fornire dati precisi sulla posizione
- Controllo ad anello chiuso per una maggiore precisione
- Posizioni intermedie programmabili
- Capacità di regolazione dinamica della posizione
Controllo proporzionale della valvola:
- Controllo del flusso variabile per un posizionamento fluido
- Regolazione elettronica della pressione
- Programmazione di più posizioni
- Integrazione con Sistemi PLC4
L'applicazione di confezionamento di Marcus ha dimostrato perfettamente la necessità di una tecnologia multiposizione. Il suo sistema richiedeva tre posizioni precise: prelievo del prodotto (25 mm), stazione di ispezione (75 mm) e posizionamento finale (125 mm). Le soluzioni tradizionali avrebbero richiesto tre cilindri separati o complessi collegamenti meccanici. Il nostro cilindro a fermo meccanico Bepto ha fornito tutte e tre le posizioni in un'unica unità affidabile! 📦
In che modo i sistemi di ritenuta meccanica forniscono un controllo affidabile della posizione?
I sistemi di bloccaggio meccanico offrono un posizionamento robusto e indipendente dall'alimentazione grazie a interfacce meccaniche di precisione che bloccano il cilindro in posizioni predeterminate.
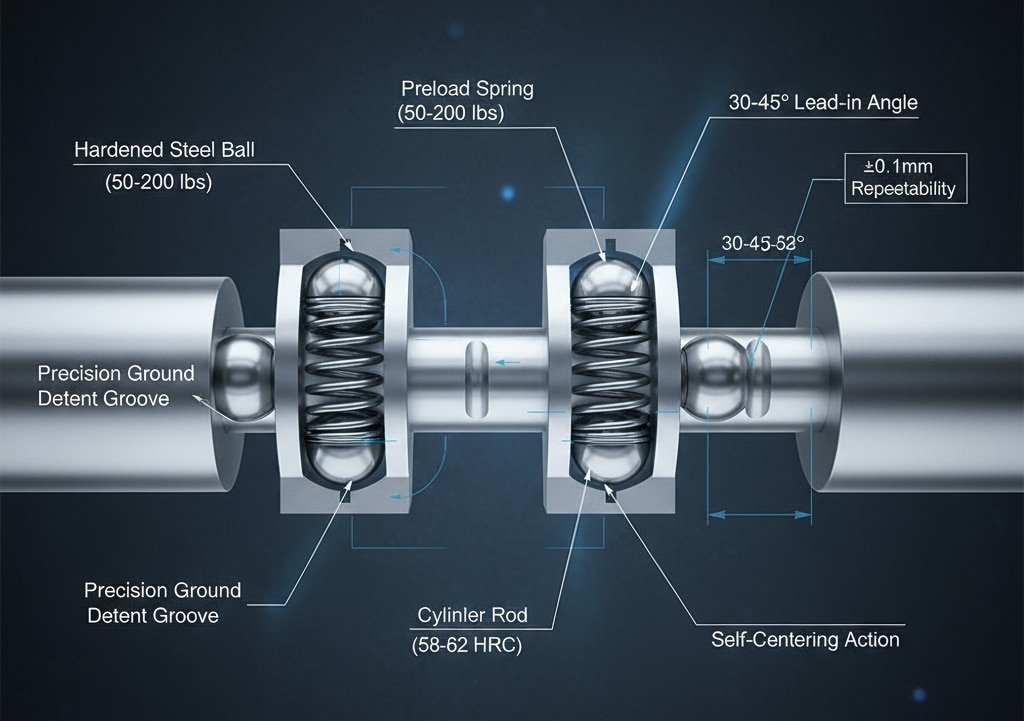
I sistemi di bloccaggio meccanico utilizzano sfere o cunei caricati a molla che si innestano in scanalature o intagli di precisione nello stelo del cilindro, garantendo un bloccaggio meccanico positivo in posizioni intermedie con elevata ripetibilità e forza di tenuta senza richiedere alimentazione esterna o controlli complessi.
Design del meccanismo di blocco
Configurazione del fermo a sfera:
- Sfere in acciaio temprato (in genere 6-12 mm di diametro)
- Forza di precarico della molla 50-200 libbre
- Scanalature di arresto rettificate di precisione
- Azione autocentrante per la ripetibilità
Geometria del fidanzamento:
- Angoli di ingresso di 30-45 gradi per un innesto morbido
- Profilo della scanalatura a raggio pieno per il massimo contatto
- Superfici temprate (58-62 HRC) per la resistenza all'usura
- Distanze adeguate per un funzionamento affidabile
Precisione e ripetibilità della posizione
Precisione meccanica:
- Tolleranza di lavorazione della scanalatura ±0,025 mm
- Tolleranza del diametro della sfera ±0,0025 mm
- Consistenza della forza della molla ±5%
- Ripetibilità della posizione complessiva ±0,1 mm
Fattori che influenzano l'accuratezza:
- Tolleranze di fabbricazione dei componenti del fermo
- Modelli di usura in caso di funzionamento prolungato
- Variazioni di carico che influenzano la forza di innesto
- Effetti della temperatura sulle dimensioni del materiale
Analisi della forza e potenza di tenuta
Forze di ingaggio:
- Il precarico della molla determina la forza d'innesto
- L'area di contatto della sfera influisce sulla distribuzione delle sollecitazioni
- La geometria della scanalatura influenza la forza di tenuta
- La forza di annullamento è in genere pari a 2-3 volte la forza di innesto
Calcoli della forza di tenuta:
- Forza di tenuta assiale = Forza della molla × sin(angolo della scanalatura)
- Fattore di sicurezza tipicamente 3:1 per carichi dinamici
- Compensazione della temperatura per la variazione della forza della molla
- Verifica della capacità di carico tramite test
Variazioni e configurazioni di design
| Tipo di fermo | Posizioni disponibili | Forza di tenuta | Forza di annullamento | Le migliori applicazioni |
|---|---|---|---|---|
| Rilevatore a sfera | 2-8 posizioni | 100-500 libbre | 200-1000 libbre | Automazione generale |
| Blocco a cuneo | 2-4 posizioni | 500-2000 libbre | 1000-4000 libbre | Applicazioni per impieghi gravosi |
| Rilevamento della camma | 3-12 posizioni | 200-800 libbre | 400-1600 libbre | Processi a più fasi |
| Fermo magnetico | 2-6 posizioni | 50-300 libbre | 100-600 libbre | Ambienti puliti |
Procedure di installazione e regolazione
Impostazione iniziale:
- Verificare l'allineamento della posizione del fermo con i requisiti dell'applicazione
- Regolare il precarico della molla per ottenere una forza d'innesto adeguata
- Test della forza di comando per il funzionamento in emergenza
- Documenta le impostazioni di posizione come riferimento per la manutenzione
Requisiti di manutenzione:
- Ispezione periodica dell'usura della scanalatura del fermo
- Verifica annuale della forza di primavera
- Lubrificazione dei componenti in movimento
- Sostituzione degli elementi di arresto usurati
Risoluzione dei problemi comuni
Deriva di posizione:
- Controllare l'usura della scanalatura del fermo
- Verificare le specifiche della forza della molla
- Ispezione della presenza di contaminazione nel meccanismo di blocco
- Valutare le condizioni di carico rispetto alla forza di tenuta
Problemi di fidanzamento:
- Esaminare l'usura della sfera o del cuneo
- Controllare la finitura superficiale della scanalatura
- Verificare la corretta lubrificazione
- Valutare l'allineamento tra i componenti
Considerazioni ambientali
Effetti della temperatura:
- Variazione della forza della molla con la temperatura
- Espansione termica dei componenti del fermo
- Selezione del materiale per l'intervallo di temperatura
- Tecniche di compensazione per condizioni estreme
Protezione dalla contaminazione:
- Meccanismi di bloccaggio sigillati per ambienti sporchi
- Requisiti di filtrazione per l'alimentazione dell'aria
- Coperchi di protezione per i componenti esterni
- Procedure di pulizia per la manutenzione
Jennifer, progettista di macchine della Carolina del Nord, aveva bisogno di un posizionamento affidabile per la sua attrezzatura di saldatura che operava in un ambiente di produzione difficile. I sistemi di posizionamento pneumatici standard non funzionavano a causa della contaminazione e delle interruzioni di corrente. Il nostro sistema meccanico di bloccaggio ha fornito un posizionamento costante, indipendentemente dallo stato di alimentazione, e si è dimostrato immune alle condizioni dell'ambiente di saldatura. interferenze elettromagnetiche5! ⚡
Perché i cilindri multiposizione Bepto sono la scelta intelligente per l'automazione complessa?
La nostra avanzata tecnologia di cilindri multiposizione combina ingegneria di precisione, opzioni di configurazione flessibili e soluzioni economiche per semplificare le complesse sfide dell'automazione.
I cilindri multiposizione Bepto sono caratterizzati da sistemi di aggancio lavorati con precisione, configurazioni di posizione personalizzabili, costruzione robusta per ambienti industriali e assistenza tecnica completa, che garantiscono un funzionamento multiposizione affidabile a un costo 60% inferiore rispetto alle alternative servo, pur mantenendo precisione e durata superiori.
Caratteristiche tecniche avanzate
Produzione di precisione:
- Scanalature di distacco lavorate a CNC con tolleranza di ±0,01 mm
- Superfici dei fermi temprate e rettificate (60+ HRC)
- Gruppi di molle di precisione
- Ripetibilità della posizione testata dalla qualità
Capacità di personalizzazione:
- Sono disponibili configurazioni da 2 a 8 posizioni
- Spaziatura di posizione personalizzata da 10 mm a 500 mm
- Forze di tenuta variabili da 50 a 2000 libbre
- Materiali speciali per ambienti difficili
Opzioni di configurazione e flessibilità
Configurazioni standard:
- Cilindri a 3 posizioni (i più diffusi)
- Spaziatura uguale o intervalli di posizione personalizzati
- Alesaggio multiplo da 1,5″ a 8″.
- Lunghezza della corsa fino a 60 pollici
Soluzioni personalizzate:
- Spaziatura di posizione asimmetrica
- Forze di arresto variabili per posizione
- Configurazioni di montaggio speciali
- Sensori e sistemi di feedback integrati
Specifiche delle prestazioni
| Foro del cilindro | Posizioni massime | Precisione della posizione | Forza di tenuta | Pressione di esercizio |
|---|---|---|---|---|
| 1,5″ (40 mm) | 6 posizioni | ±0,1 mm | 200 libbre | 80-150 PSI |
| 2,5″ (63 mm) | 8 posizioni | ±0,1 mm | 400 libbre | 80-150 PSI |
| 4″ (100 mm) | 6 posizioni | ±0,05 mm | 800 libbre | 80-150 PSI |
| 6″ (160 mm) | 4 posizioni | ±0,05 mm | 1500 libbre | 80-150 PSI |
Vantaggi in termini di qualità e affidabilità
Standard di test:
- Test di durata di 5 milioni di cicli
- Verifica della ripetibilità della posizione
- Convalida della forza di tenuta
- Test di durata ambientale
Caratteristiche di affidabilità:
- Meccanismi di blocco a tenuta stagna
- Materiali resistenti alla corrosione
- Molle stabili alla temperatura
- Design resistente alla contaminazione
Analisi costo-efficacia
Risparmio sull'investimento iniziale:
- 60% costo inferiore rispetto ai sistemi servo-pneumatici
- 40% meno di disposizioni a più cilindri
- Riduzione della complessità di installazione
- Requisiti ridotti del sistema di controllo
Vantaggi in termini di costi operativi:
- Non è necessaria alcuna alimentazione esterna per il mantenimento della posizione
- Requisiti minimi di manutenzione
- Riduzione delle scorte di ricambi
- Minor consumo di energia
Assistenza tecnica e servizi
Assistenza tecnica:
- Analisi dell'applicazione e dimensionamento del cilindro
- Progettazione della configurazione di posizione personalizzata
- Guida all'installazione e alla configurazione
- Supporto per la risoluzione dei problemi e l'ottimizzazione
Documentazione e formazione:
- Manuali di installazione completi
- Documentazione delle procedure di manutenzione
- Programmi di formazione tecnica
- Risorse di supporto online
Integrazione e compatibilità
Integrazione del sistema di controllo:
- Compatibile con le valvole pneumatiche standard
- Sensori di feedback di posizione opzionali
- Capacità di integrazione del PLC
- Interfacce di montaggio industriali standard
Applicazioni di retrofit:
- Sostituzione diretta dei cilindri esistenti
- Compatibilità di montaggio con le principali marche
- Opzioni di filettatura dell'attacco (NPT, G, M5)
- Sono disponibili soluzioni di adattamento personalizzate
Storie di successo e applicazioni
Applicazioni comprovate:
- Sistemi di posizionamento in linea di montaggio
- Attrezzature per la movimentazione dei materiali
- Automazione delle macchine per l'imballaggio
- Apparecchiature di test e ispezione
Risultati dei clienti:
- 95% riduzione della complessità del sistema di posizionamento
- 80% miglioramento della coerenza dei tempi di ciclo
- 70% riduzione dei requisiti di manutenzione
- 99,9% ripetibilità della posizione
La nostra tecnologia di cilindri multiposizione ha rivoluzionato l'automazione per oltre 800 clienti in tutto il mondo, eliminando la necessità di sistemi meccanici complessi e offrendo un posizionamento di precisione a costi da cilindro pneumatico. Non produciamo solo cilindri, ma progettiamo soluzioni di posizionamento complete che semplificano l'automazione e migliorano la produttività! 🚀
Conclusione
I cilindri multiposizione eliminano i sistemi meccanici complessi e le costose soluzioni di asservimento, fornendo un posizionamento intermedio preciso con un semplice controllo pneumatico e un funzionamento meccanico affidabile.
Domande frequenti sui cilindri multiposizione
D: Quante posizioni può fornire un singolo cilindro multiposizione?
I cilindri multiposizione Bepto possono fornire da 2 a 8 posizioni distinte a seconda delle dimensioni dell'alesaggio e della lunghezza della corsa. La maggior parte delle applicazioni utilizza 3-4 posizioni per un equilibrio ottimale tra funzionalità e affidabilità, con configurazioni personalizzate disponibili per requisiti specifici.
D: Cosa succede se il cilindro si blocca tra le posizioni?
I nostri sistemi di bloccaggio meccanico includono una funzione di override che consente alla forza manuale o pneumatica di spostare il cilindro nella posizione successiva. Il design del fermo a molla guida naturalmente il pistone verso la posizione stabile più vicina durante il funzionamento.
D: I cilindri multiposizione possono gestire gli stessi carichi dei cilindri standard?
Sì, i cilindri multiposizione Bepto mantengono la piena capacità di forza in tutte le posizioni. Il meccanismo di fermo aggiunge forza di tenuta anziché ridurla, con forze di tenuta che vanno da 200 a 2000 libbre a seconda della configurazione.
D: Come posso programmare diverse posizioni con il mio sistema di controllo esistente?
I cilindri multiposizione funzionano con valvole pneumatiche standard e controlli di temporizzazione. Ogni posizione richiede una sequenza di valvole e una temporizzazione specifiche. Forniamo guide di programmazione dettagliate e possiamo assistere nell'integrazione del sistema di controllo per la vostra applicazione specifica.
D: Quale manutenzione è necessaria per i sistemi di bloccaggio dei cilindri a più posizioni?
La manutenzione è minima: ispezione annuale dell'innesto del fermo, lubrificazione periodica delle parti mobili e verifica della precisione della posizione. Il design meccanico elimina i componenti elettronici che richiedono frequenti calibrazioni o sostituzioni.
-
Scoprite come i servosistemi forniscono un controllo del movimento di alta precisione nell'automazione industriale. ↩
-
Scoprite i principi dei sensori a effetto Hall e il loro utilizzo nel posizionamento senza contatto. ↩
-
Scoprite come gli encoder lineari forniscono un feedback di posizione preciso nei sistemi di controllo ad anello chiuso. ↩
-
Comprendere il ruolo dei controllori logici programmabili (PLC) nella gestione e nell'automazione dei processi industriali. ↩
-
Leggete le cause e gli effetti dell'interferenza elettromagnetica (EMI) negli ambienti industriali. ↩
