

ロングストローク自動化システムで予測不能な遅延やタイミング変動が発生し、生産工程全体が乱れる場合、それは過渡圧力応答遅延の影響です。この現象は各サイクルに200~500msの予測不能な遅延を付加します。この目に見えないタイミングの敵は、定常状態の計算に基づいて設計したエンジニアを苛立たせ、現実の動的挙動に直面させます。⏱️
バルブにおける圧力変化が空気量中を伝播しシリンダピストンに到達するまでに時間を要する場合、過渡圧力応答遅延が発生する。この遅延時間は 空気の圧縮性1, システム容量、流量制限、および空気回路を通る圧力波の伝播速度。.
先週、デトロイトのシステムインテグレーターであるケビンと協力した。彼の自動車組立ラインでは、2メートルのストロークシリンダーが同期の問題を引き起こしており、最大400ミリ秒のタイミング変動が発生し、高価な部品が廃棄されていた。.
目次
- 空気圧システムにおける一過性の圧力応答遅延の原因は何か?
- 圧力遅延時間をどのように測定し定量化するのですか?
- なぜロングストロークシリンダーは遅れが生じやすいのか?
- 過渡応答の遅れを最小限に抑える方法にはどのようなものがあるか?
空気圧システムにおける一過性の圧力応答遅延の原因は何か?
圧力波の伝播の背後にある物理を理解することは、システムの応答時間を予測するために不可欠である。🌊
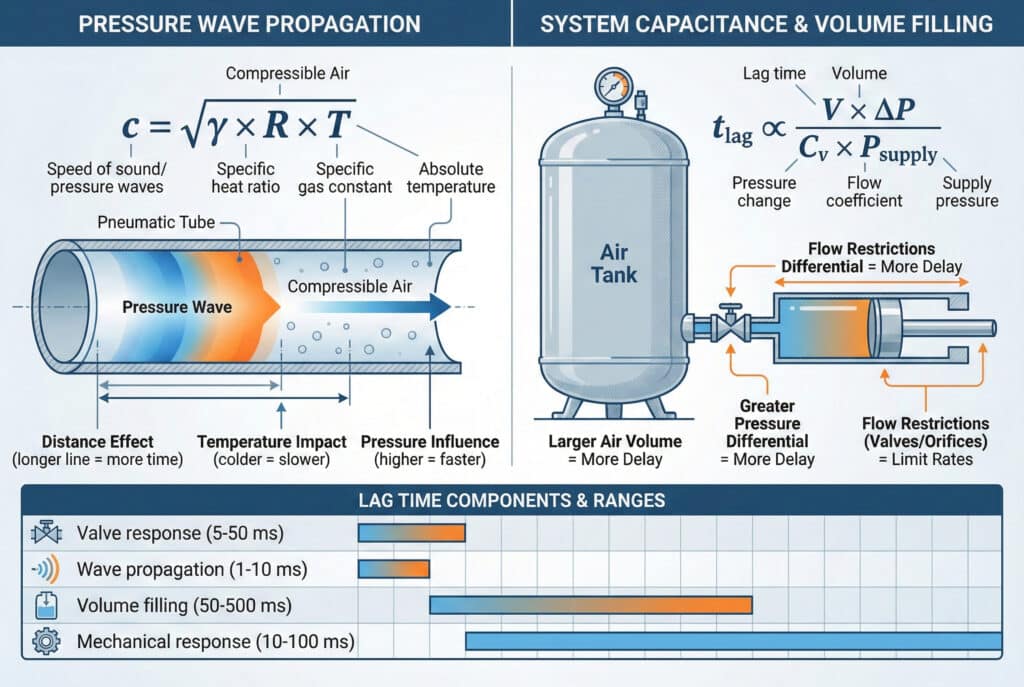
過渡圧力応答の遅れは、有限の速度に起因する。 圧力波の伝播2 圧縮性のある空気(標準状態で約343 m/s)を通し、それに加えて システム容量3 動作開始前に大量の空気を加圧または減圧する必要がある効果。.
圧力伝播の基礎物理学
空気中における圧力波の速度は、以下の式によって規定される:
場所:
- = 音速/圧力波の速度 (m/s)
- 比熱比(空気の場合1.4)
- = 気体固有定数(空気の場合 287 J/kg・K)
- 絶対温度 (K)
主要な遅延要因
波動伝播遅延:
- 距離効果より長い空気配管は伝播時間を増加させる
- 温度の影響冷たい空気は波の速度を低下させる
- 圧力の影響より高い圧力は波の速度をわずかに増加させる
システム容量:
- 空気量より大きな体積には、より多くの空気の物質移動が必要となる
- 圧力差より大きな圧力変化にはより長い時間が必要である
- 流量制限開口部と弁は充填/排出速度を制限する
遅延時間要素
| コンポーネント | 標準範囲 | 主要要因 |
|---|---|---|
| バルブ応答 | 5~50ミリ秒 | バルブ技術 |
| 波の伝播 | 1~10ミリ秒 | 行の長さ |
| 容積充填 | 50~500ミリ秒 | システム容量 |
| 機械的応答 | 10~100ミリ秒 | 負荷慣性 |
システムボリュームへの影響
体積と遅延時間との関係は次の通りである:
より大きな体積()および圧力変化(遅延を増加させる一方、より高い流量係数()と供給圧力がそれを減少させる。.
圧力遅延時間をどのように測定し定量化するのですか?
過渡応答の正確な測定には、適切な計測機器と解析技術が必要です。📊
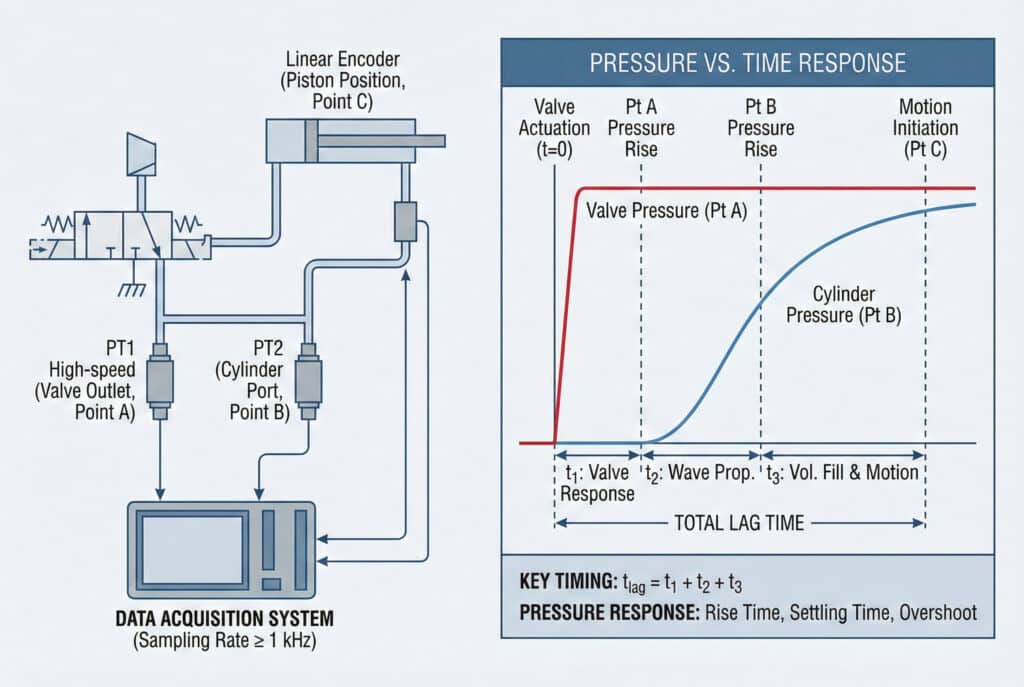
高速測定による圧力遅延時間の計測 圧力トランスデューサ4 バルブ出口とシリンダポートに配置され、バルブ作動からシリンダ動作開始までの完全な過渡応答を捕捉するため、1~10kHzのサンプリングレートで圧力対時間データを記録する。.
測定セットアップ要件
必須の計測機器:
- 圧力トランスデューサ応答時間 <1ms、精度 ±0.1%
- データ収集サンプリングレート ≥1 kHz
- 位置センサー直線エンコーダまたはLVDTによる動作検出
- バルブ制御試験の再現性を確保するための精密なタイミング制御
測定ポイント:
- 点Aバルブ出口(基準タイミング)
- ポイントBシリンダポート(吸気タイミング)
- 点Cピストン位置(動作開始)
分析方法論
主要なタイミングパラメータ:
- t₁バルブ作動から出口圧力変化まで
- t₂: アウトレット圧力変化からシリンダポート圧力変化へ
- t₃シリンダポート圧力変化による動作開始
- 完全な遅れt₁ + t₂ + t₃
圧力応答特性:
- 上昇時間10-90% 圧力変化持続時間
- 沈静時間最終圧力±2%に到達するまでの時間
- オーバーシュートピーク圧力が定常状態値を上回る
データ分析手法
| 分析法 | 申請 | 精度 |
|---|---|---|
| ステップ応答 | 標準的な遅延測定 | ±5ミリ秒 |
| 周波数特性 | 動的システム特性評価 | ±2ミリ秒 |
| 統計分析 | 変動の定量化 | ±1ミリ秒 |
事例研究:ケビンの自動車ライン
ケビンの2メートルストロークシステムを測定したとき:
- バルブ応答: 15ミリ秒
- 波の伝播: 8ミリ秒(総線長2.7m)
- 容積充填: 285ミリ秒(大型シリンダー室)
- 動作開始: 45ミリ秒(高慣性負荷)
- 測定された総遅延: 353 ミリ秒
これにより、圧力供給の変動と組み合わさった際の彼の400ミリ秒のタイミング変動が説明された。.
なぜロングストロークシリンダーは遅れが生じやすいのか?
ロングストロークシリンダーは、過渡応答の問題を増幅させる特有の課題をもたらす。📏
ロングストロークシリンダーは、より大きな内部空気容積による空気質量移動量の増加、伝播遅延を増加させる長い空気配管、および動作開始に対する慣性抵抗を大きくする高い可動質量により、より大きな遅延の影響を受けやすい。.
容積とストロークの関係
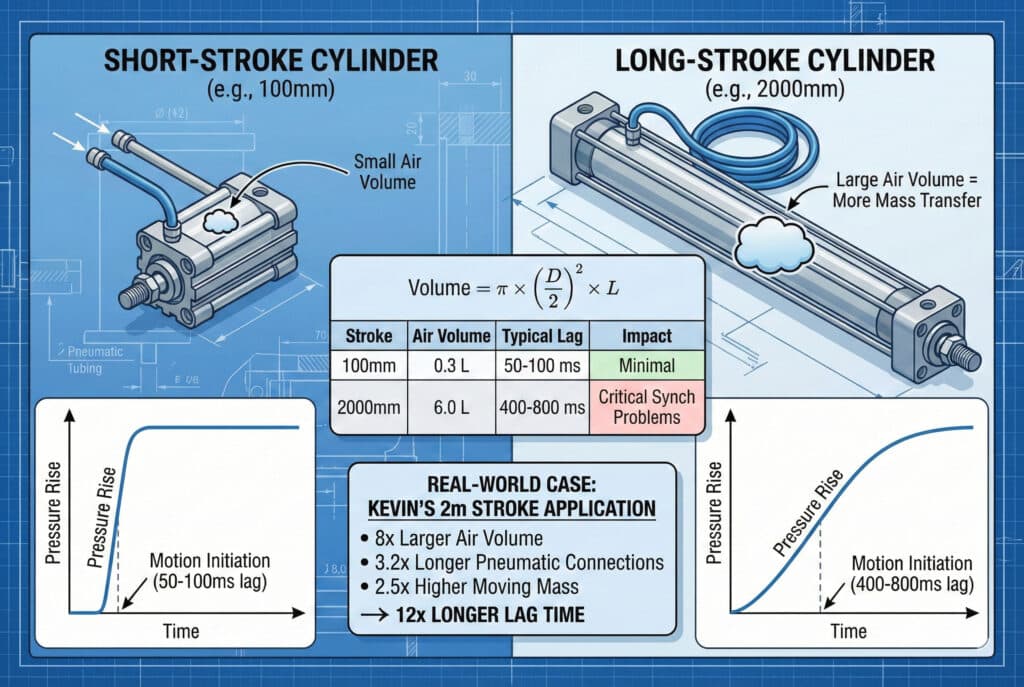
内径 D、ストローク長 L のシリンダーの場合:
空気量はストローク長に比例して変化し、遅延時間に直接影響を与える。.
ストローク長の影響分析
| ストローク長 | 空気量 | 典型的なラグ | アプリケーションの影響 |
|---|---|---|---|
| 100ミリメートル | 0.3 L | 50~100ミリ秒 | 最小限の影響 |
| 500ミリメートル | 1.5 L | 150~300ミリ秒 | 顕著な遅延 |
| 1000ミリメートル | 3.0 L | 250~500ミリ秒 | 重大なタイミングの問題 |
| 2000ミリメートル | 6.0 L | 400~800ミリ秒 | 重大な同期の問題 |
ロングストロークシステムにおける複合要因
空気配管の長さ:
- 距離の増加長いストロークには、より長い供給ラインが必要となることが多い
- 複数の接続より多くのフィッティングと潜在的な制限
- 圧力降下より大きな累積圧力損失
機械的考慮事項:
- より高い慣性長いシリンダーは、より重い荷重を動かすことが多い
- 構造適合性より長いシステムでは機械的なたわみが生じる可能性がある
- 増大する課題サポート要件は対応に影響します
動的挙動の違い
ロングストロークシリンダーは異なる動的特性を示す:
圧力波の反射:
- 定在波長い空気柱の中で発生することがある
- 共鳴効果固有振動数は動作周波数と一致する場合がある
- 圧力振動: ハンティングや不安定性を引き起こす可能性があります
非一様な圧力分布:
- 圧力勾配過渡現象中の円筒長に沿って
- 局所加速度: ストローク位置による異なる応答
- 終端効果: ストロークの極限における異なる挙動
実例:自動車組立
ケビンの申請書において、彼の2メートルストロークシリンダーには以下の特徴があることが判明した:
- 8倍の空気量 同等の250mmストロークシリンダよりも
- 3.2倍長い空気配管接続 機械の配置のため
- 2.5倍の移動質量 拡張ツールから
- 複合効果: ショートストローク方式の代替品と比べて12倍長い遅延時間
過渡応答の遅れを最小限に抑える方法にはどのようなものがあるか?
過渡応答の遅れを低減するには、各遅延要素を対象とした体系的なアプローチが必要である。🚀
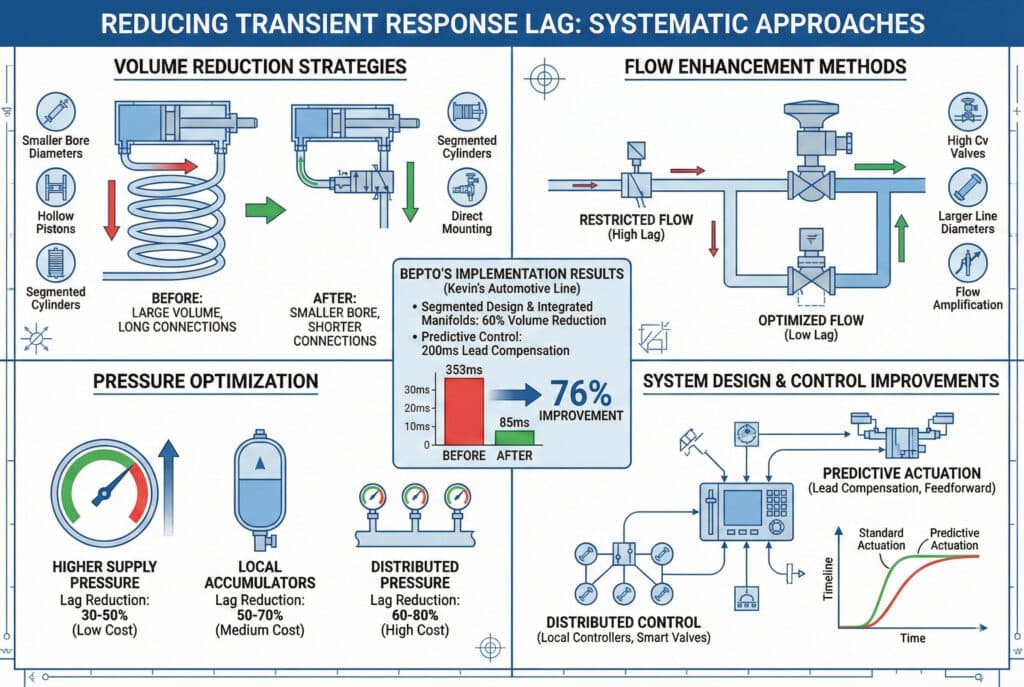
過渡応答の遅れを最小化するため、容積削減(小径シリンダ、短接続)、流量向上(大口径バルブ、抵抗低減)、圧力最適化(高供給圧力、アキュムレータ)、システム設計改善(分散制御、予測作動)を実施する。.
減容化戦略
シリンダー設計最適化:
- より小さい内径: 力を維持しながら空気量を減らす
- 中空ピストン内部の空気量を最小限に抑える
- セグメント化された円筒長い円筒1本ではなく、複数の短い円筒
接続の最小化:
- 直接取付シリンダーに直接取り付けられたバルブ
- 統合マニホールド中間接続を排除する
- 最適化されたルーティング最短の実用的な空気圧経路
流動促進法
バルブ選択:
- 高Cvバルブより速い容量充填/排出
- 高速応答弁バルブ作動時間の短縮
- 複数のバルブ大容量用並列流路
システム設計:
- より大きな線径流量制限の緩和
- 最小限の付属品各接続ごとに制限が追加される
- フロー増幅大流量用パイロット作動式システム
圧力システムの最適化
| 方法 | 遅延低減 | 導入コスト |
|---|---|---|
| 供給圧力の上昇 | 30-50% | 低 |
| ローカルアキュムレータ | 50-70% | 中 |
| 分散圧力 | 60-80% | 高 |
| 予測制御 | 70-90% | 非常に高い |
高度制御技術
予測作動:
- リード報酬動作前にバルブを作動させる
- フィードフォワード制御5モデルに基づいてシステムの応答を予測する
- 適応タイミングシステム変動を学習し、調整する
分散制御:
- ローカルコントローラー通信遅延を削減する
- スマートバルブ統合制御と作動
- エッジコンピューティングリアルタイム応答最適化
ベプトの遅延最小化ソリューション
ベプト・ニューマティクスでは、ロングストローク用途向けに専門的なアプローチを開発しました:
デザイン・イノベーションズ:
- セグメント式ロッドレスシリンダー複数の短いセクションと協調制御
- 統合バルブマニホールド接続量を最小限に抑える
- 最適化されたポート形状強化された流動特性
制御統合:
- 予測アルゴリズム既知の遅延特性を補正する
- 適応システム: 変化する条件への自己調整
- 分散型センシング複数の位置フィードバックポイント
実施結果
ケビンの自動車組立ライン向けに、我々は以下を実施しました:
- セグメント化されたシリンダー設計有効体積を60%削減
- 統合バルブマニホールド接続容量40%を削減
- 予測制御200ミリ秒のリード補償
- 結果遅延を353msから85msに削減(761%の改善)
費用便益分析
| ソリューションカテゴリ | 遅延低減 | コスト要因 | ROIのタイムライン |
|---|---|---|---|
| 設計最適化 | 40-60% | 1.2~1.5倍 | 6~12か月 |
| 流動促進 | 30-50% | 1.1~1.3倍 | 3~6か月 |
| 高度な制御 | 60-80% | 2.0-3.0倍 | 12~24か月 |
成功の鍵は、過渡応答の遅れが単なるタイミングの問題ではなく、最適な性能を実現するために根本から設計すべきシステムの基本特性であることを理解することにある。🎯
過渡圧力応答遅延に関するよくある質問
異なるシリンダストローク長における典型的な遅延時間はどれくらいですか?
遅延時間は一般的にストローク長に比例する:100mmストロークでは50~100ms、500mmストロークでは150~300ms、2000mmストロークでは400~800ms。ただし、システム設計、バルブ選定、作動圧力がこれらの値に大きく影響する。.
作動圧力は過渡応答の遅れにどのように影響しますか?
作動圧力を高くすると、空気流の駆動力が増加し、必要な相対圧力変化が減少するため、遅延時間が短縮される。供給圧力を2倍にすると、通常30~40%の遅延低減効果が得られるが、絞流制限のためこの関係は直線的ではない。.
過渡応答の遅れを完全に除去できますか?
圧力波の伝播速度が有限であること、および空気の圧縮性のため、完全な除去は不可能である。ただし、適切なシステム設計により遅延を無視できるレベル(10~20ms)まで低減するか、予測制御技術によって補償することが可能である。.
なぜ一部のシリンダーは遅延時間が一定でないように見えるのか?
遅延時間の変動は、供給圧力の変動、空気密度に影響を与える温度変化、バルブの応答性のばらつき、およびシステムの負荷差によって生じます。これらの要因により、サイクルごとに遅延時間が±20~50%変動する可能性があります。.
ロッドレスシリンダーはロッド付きシリンダーとは異なる遅延特性を持つのか?
ロッドレスシリンダーは、設計の柔軟性により内部容積の最適化やバルブの統合マウントが可能となるため、より優れた遅延特性を発揮できる。ただし、設計によっては内部容積が大きくなる場合もあり、最終的な効果は具体的な実装方法と用途要件に依存する。.
