

Гістерезис1 є невидимим вбивцею точності, що причаївся в кожній пропорційній системі приводу, тихо знищуючи точність позиціонування на 15%, в той час як інженери звинувачують у всьому, крім справжнього винуватця. Це явище змушує приводи “запам'ятовувати” свої попередні положення, створюючи непередбачувані мертві зони, які перетворюють плавне управління на розчаровуючу нестабільність. 😠
Гістерезис у пропорційному керуванні приводом створює похибки позиціонування в розмірі 2-15% повного ходу через механічний люфт, тертя ущільнення, магнітні ефекти та мертві зони регулювального клапана, що вимагає компенсації за допомогою програмних алгоритмів, механічного попереднього навантаження, зворотного зв'язку з вищою роздільною здатністю та правильного вибору компонентів для досягнення точності позиціонування нижче 1%.
Два місяці тому я працював з Дженніфер, інженером з управління на аерокосмічному виробництві в Сіетлі, чиї прецизійні складальні роботи постійно промахувалися на 3 мм — не випадково, а за передбачуваною схемою, що вказувала на гістерезис. Після впровадження наших рішень Bepto проти гістерезису її похибки позиціонування знизилися до менше ніж 0,5 мм. ✈️
Зміст
- Що таке гістерезис і чому він виникає в пропорційних приводах?
- Як гістерезис впливає на різні типи пропорційних систем управління?
- Які методи вимірювання найкраще визначають та кількісно оцінюють ефекти гістерезису?
- Які найефективніші методи мінімізації гістерезису у вашій системі?
Що таке гістерезис і чому він виникає в пропорційних приводах?
Розуміння механізмів гістерезису є необхідним для досягнення точного пропорційного регулювання в пневматичних і гідравлічних системах приводів.
Гістерезис виникає, коли вихідне положення приводу залежить як від поточної команди входу, так і від історії попередніх положень, створюючи різні шляхи реагування на команди збільшення та зменшення через механічний люфт, сили тертя, магнітні ефекти та мертві зони регулювального клапана, які накопичуються протягом усього контуру регулювання.
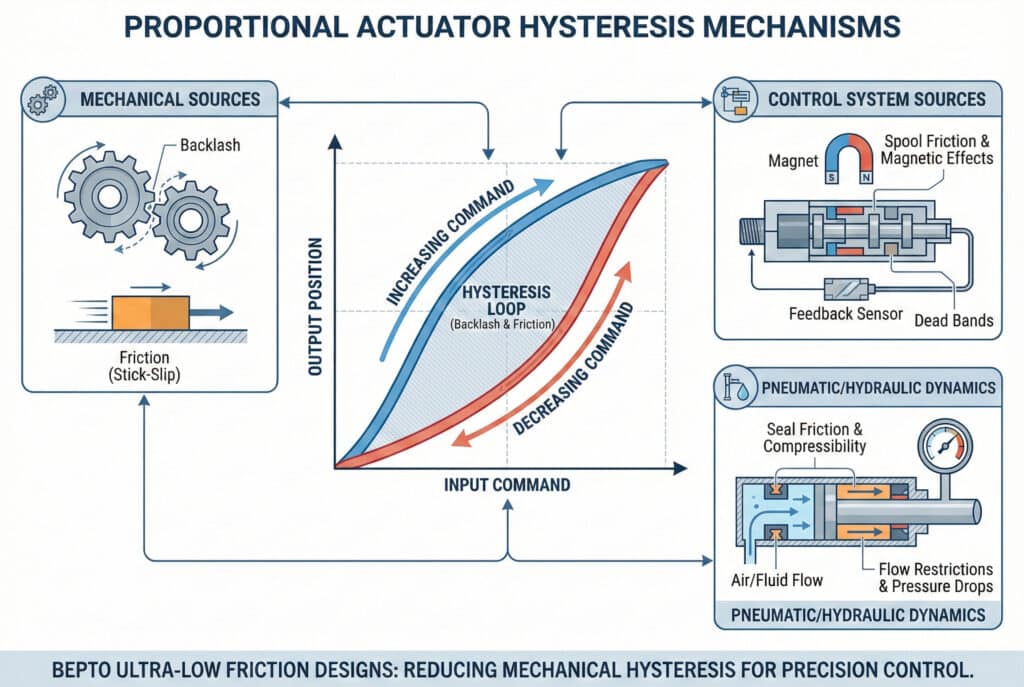
Основні механізми гістерезису
Механічні джерела
Фізичні компоненти значно впливають на гістерезис системи:
- Люфт2: Зубчасті передачі, муфти та з'єднання створюють мертві зони
- Тертя: Статичні та кінетичні відмінності тертя спричиняють явище «прилипання-ковзання»
- Відповідність: Еластична деформація в механічних з'єднаннях
- Зразки одягу: Знос компонентів створює нерівні контактні поверхні
Джерела системи управління
Електронні та пневматичні елементи управління додають гістерезис:
| Тип компонента | Типовий гістерезис | Основна причина | Стратегія пом'якшення наслідків |
|---|---|---|---|
| Сервоклапани | 0.1-0.5% | Тертя котушки | Високочастотний дрожання |
| Пропорційні клапани3 | 0.5-2% | Магнітний гістерезис | Компенсація зворотного зв'язку |
| Датчики положення | 0.05-0.2% | Електронний шум | Фільтрування сигналу |
| Підсилювачі | 0.1-0.3% | Налаштування мертвої зони | Регулювання калібрування |
Фізичні джерела в пневматичних системах
Ефекти тертя ущільнення
Пневматичні ущільнення створюють значні джерела гістерезису:
- Тертя відриву: Для початку руху потрібна більша сила
- Тертя при бігу: Менша сила під час безперервного руху
- поведінка "stick-slip4: Нерівномірний рух на низьких швидкостях
- Залежність від температури: Зміна тертя залежно від робочої температури
Динаміка тиску
Вплив тиску пневматичної системи сприяє гістерезису:
- Стисливість: Стиснення повітря створює пружину
- Обмеження потоку: Обмеження щодо клапанів та фітингів спричиняють затримки
- Падіння тиску: Втрати в лінії створюють сили, що залежать від положення
- Вплив температури: Теплове розширення впливає на жорсткість системи
У компанії Bepto ми розробили безштокні циліндри з ущільненнями з наднизьким коефіцієнтом тертя та прецизійно обробленими направляючими системами, які зменшують механічний гістерезис на 60% порівняно зі стандартними конструкціями, що є критично важливим для високоточних пропорційних систем управління. 🎯
Залежний від навантаження гістерезис
Вплив змінного навантаження
Зовнішні навантаження значно впливають на характеристики гістерезису:
- Гравітаційні навантаження: Зміни сили залежно від положення
- Інерційні навантаження: Вимоги до сили, що залежать від прискорення
- Навантаження процесу: Змінні зовнішні сили під час роботи
- Навантаження від тертя: Зміни сили контакту з поверхнею
Взаємодія динамічних навантажень
Рухомі вантажі створюють складні гістерезисні залежності:
- Ефекти прискорення: Інерційні сили під час зміни швидкості
- Вібраційна муфта: Зовнішні вібрації впливають на позиціонування
- Резонансні взаємодії: Збудження власної частоти
- Варіації демпфірування: Характеристики демпфірування, що залежать від навантаження
Як гістерезис впливає на різні типи пропорційних систем управління?
Ефекти гістерезису значно різняться залежно від різних технологій приводів та архітектур управління, що вимагає індивідуальних стратегій компенсації.
Системи з відкритим контуром мають похибки гістерезису 5-15% без можливості корекції, тоді як системи із замкнутим контуром можуть зменшити гістерезис до 0,5-2% за допомогою компенсації зворотного зв'язку, а сучасні сервосистеми досягають точності нижче 0,1% завдяки використанню енкодерів з високою роздільною здатністю та складних алгоритмів керування.
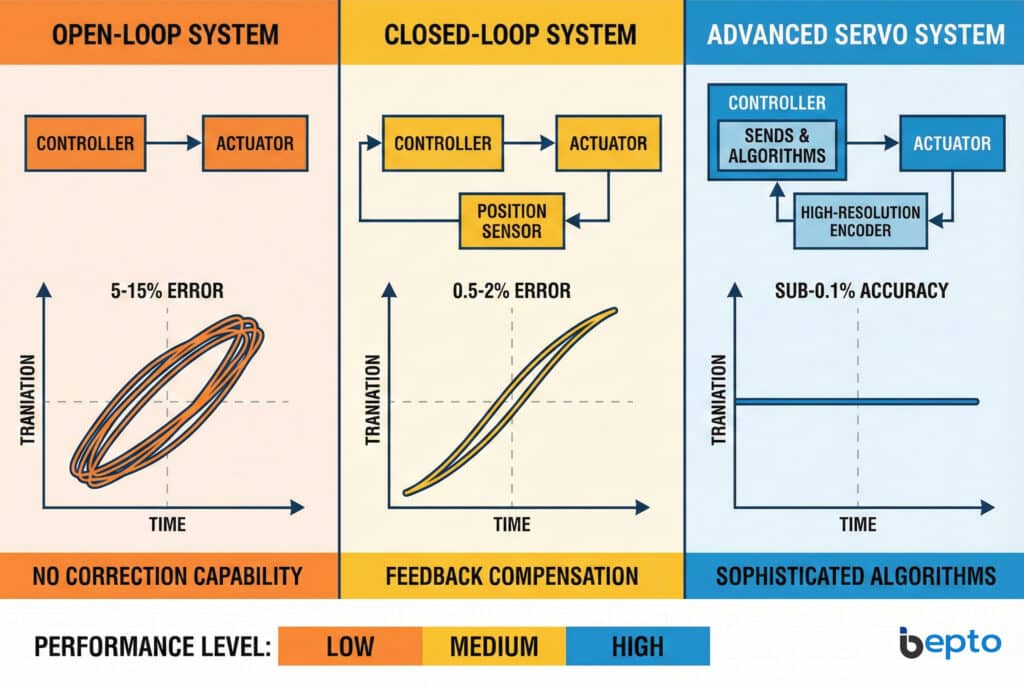
Системи управління з відкритим контуром
Внутрішні обмеження
Системи з відкритим контуром не можуть компенсувати ефекти гістерезису:
- Без корекції зворотного зв'язку: Помилки накопичуються без виявлення
- Передбачувані закономірності: Гістерезис створює повторювані помилки позиціонування
- Чутливість до температури: Продуктивність залежить від умов експлуатації
- Залежність від навантаження: Різні навантаження створюють різні моделі гістерезису
Типові характеристики продуктивності
Характеристики гістерезису системи з розімкнутим контуром залежать від застосування:
| Тип програми | Діапазон гістерезису | Прийнятні види використання | Обмеження продуктивності |
|---|---|---|---|
| Просте позиціонування | 5-15% | Некритичні завдання | Погана повторюваність |
| Регулювання швидкості | 3-8% | Грубе регулювання швидкості | Змінна продуктивність |
| Контроль сили | 10-25% | Основні застосування сили | Непослідовний результат |
| Багатоосьові системи | 8-20% | Проста автоматизація | Кумулятивні помилки |
Системи управління із замкнутим контуром
Компенсація за зворотний зв'язок
Системи із замкнутим контуром можуть активно компенсувати гістерезис:
- Виявлення помилок: Постійний моніторинг положення
- Корекція в режимі реального часу: Негайна реакція на помилки позиціонування
- Адаптивне управління: Алгоритми навчання покращують продуктивність
- Відкидання перешкод: Компенсація зовнішньої сили
Ефективність алгоритму управління
Різні стратегії управління по-різному справляються з гістерезисом:
- ПІД-регулювання5: Базова компенсація, залишкова гістерезис 2-5%
- Прямий контроль: Прогнозна компенсація, залишок 1-3%
- Адаптивне управління: Компенсація навчання, залишок 0,5-2%
- Модельно-орієнтоване управління: Теоретична компенсація, залишок 0,1-1%
Системи сервоуправління
Передові методи компенсації
Високоефективні сервосистеми використовують складну компенсацію гістерезису:
- Картування гістерезису: Характеристика системи та таблиці компенсації
- Техніки попереднього завантаження: Механічне зміщення для усунення мертвих зон
- Сигнали дроберизації: Високочастотне збудження для подолання тертя
- Алгоритми прогнозування: Модельний прогноз гістерезису
Майкл, інженер-робототехнік на заводі точного машинобудування в Північній Кароліні, впровадив на своїй складальній лінії рекомендовані нами оновлення сервоуправління. Точність позиціонування покращилася з ±2,5 мм до ±0,3 мм, що дозволило зменшити кількість дефектів продукції на 75% і заощадити $50 000 щомісяця на витратах на переробку. 🤖
Виклики багатоосьової системи
Кумулятивні ефекти
Проблеми гістерезису, пов'язані з використанням декількох приводів:
- Накопичення помилок: Помилки окремих осей комбінуються
- Ефекти зчеплення: Взаємодії осей створюють складні візерунки
- Проблеми з синхронізацією: Різні моделі гістерезису спричиняють проблеми з координацією
- Складність калібрування: Багато систем вимагають індивідуального налаштування
Стратегії координації
У сучасних багатоосьових системах використовуються спеціалізовані технології:
- Управління «майстер-підлеглий»: Одна вісь веде, інші слідують
- Компенсація перехресного зв'язку: Корекція взаємодії осей
- Синхронізоване позиціонування: Координовані профілі руху
- Глобальна оптимізація: Оптимізація продуктивності всієї системи
Які методи вимірювання найкраще визначають та кількісно оцінюють ефекти гістерезису?
Точне вимірювання та характеристика гістерезису дозволяє розробляти ефективні стратегії компенсації та оптимізувати систему.
Вимірювання гістерезису вимагає двонаправлених випробувань позиціонування з використанням енкодерів з високою роздільною здатністю, реєстрації взаємозв'язку між положенням і командою протягом повних циклів, аналізу ширини петлі та асиметричних моделей, а також документування залежності від температури та навантаження для створення комплексних карт компенсації з метою досягнення оптимальної ефективності управління.
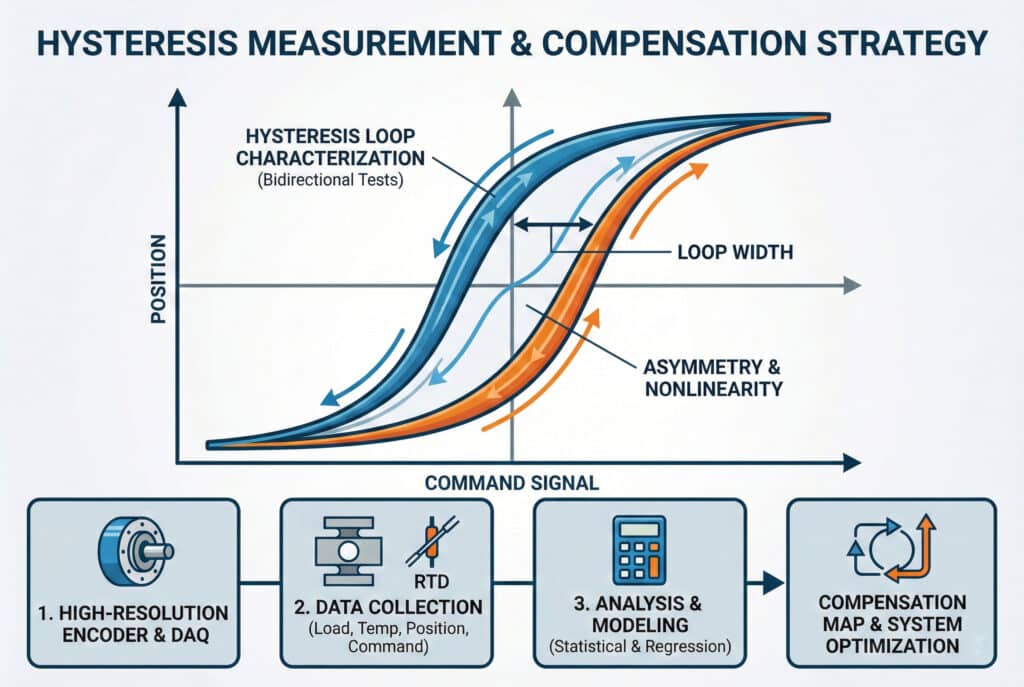
Стандартні протоколи вимірювання
Двонаправлені тести позиціонування
Комплексна характеристика гістерезису вимагає систематичного тестування:
- Повні цикли ходу: Повні послідовності розширення та втягування
- Кілька швидкостей: Різні профілі швидкості для визначення залежності від швидкості
- Варіації навантаження: Різні зовнішні навантаження для відображення ефектів навантаження
- Діапазони температур: Оцінка впливу робочої температури
Вимоги до збору даних
Точне вимірювання гістерезису вимагає високоякісних приладів:
| Параметр вимірювання | Необхідна роздільна здатність | Типове обладнання | Ціль точності |
|---|---|---|---|
| Зворотній зв'язок з позицією | 0,01% ходу | Лінійний енкодер | ±0,0051 ТП3Т |
| Командний сигнал | Мінімум 12 біт | Система DAQ | ±0.1% |
| Вимірювання навантаження | 1% номінальної сили | Тензодатчик | ±0.5% |
| Температура | ±1°C | Датчик RTD | ±0.5°C |
Методи аналізу
Характеристика петлі гістерезису
Математичний аналіз виявляє характеристики гістерезису:
- Ширина петлі: Максимальна різниця положень при однаковій команді
- Асиметрія: Напрямлена похибка в помилках позиціонування
- Нелінійність: Відхилення від ідеальної лінійної характеристики
- Повторюваність: Послідовність протягом декількох циклів
Методи статистичного аналізу
Сучасні методи аналізу дозволяють кількісно оцінити ефекти гістерезису:
- Стандартне відхилення: Вимірювання повторюваності позиціонування
- Кореляційний аналіз: Сила взаємозв'язку між вхідними та вихідними даними
- Частотний аналіз: Характеристики динамічної реакції
- Регресійний аналіз: Розробка математичної моделі
Системи моніторингу в реальному часі
Безперервне відстеження гістерезису
Виробничі системи отримують переваги від постійного моніторингу гістерезису:
- Вбудовані датчики: Вбудовані системи зворотного зв'язку щодо положення
- Реєстрація даних: Безперервна реєстрація показників
- Аналіз тенденцій: Довгострокове відстеження зниження продуктивності
- Профілактичне технічне обслуговування: Раннє попередження про знос компонентів
Наші діагностичні системи Bepto включають моніторинг гістерезису в режимі реального часу, який попереджає операторів, коли помилки позиціонування перевищують порогові значення 0,5%, що дозволяє проводити профілактичне обслуговування до того, як точність погіршиться до неприйнятного рівня. 📊
Оцінка впливу на навколишнє середовище
Температурні ефекти
Температура значно впливає на характеристики гістерезису:
- Теплове розширення: Зміни механічних розмірів
- Зміни в'язкості: Зміни властивостей рідини
- Властивості матеріалу: Залежність модуля пружності від температури
- Продуктивність ущільнення: Зміни коефіцієнта тертя
Аналіз залежності від навантаження
Зовнішні навантаження створюють складні гістерезисні залежності:
- Статичні навантаження: Вплив постійної сили на позиціонування
- Динамічні навантаження: Змінна сила удару під час руху
- Інерційні ефекти: Похибки позиціонування, що залежать від прискорення
- Варіації тертя: Вплив стану поверхні на продуктивність
Які найефективніші методи мінімізації гістерезису у вашій системі?
Застосування комплексних стратегій зменшення гістерезису дозволяє досягти точності позиціонування нижче 1% у складних системах пропорційного керування.
Ефективна мінімізація гістерезису поєднує механічні вдосконалення, включаючи компоненти з низьким коефіцієнтом тертя та усунення люфту, вдосконалення системи управління з компенсацією випередження та адаптивними алгоритмами, а також контроль температури та стабільності навантаження, що зазвичай зменшує гістерезис з 5-15% до менше ніж 1% від повної шкали.
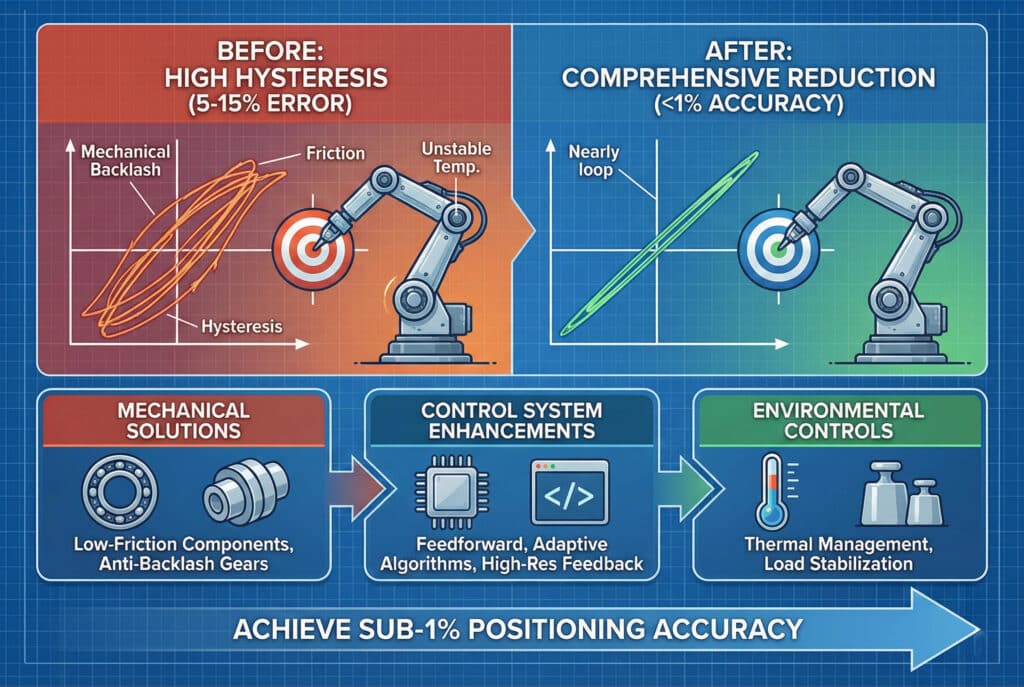
Механічні рішення
Вибір і проектування компонентів
Вибирайте компоненти, спеціально розроблені для низького гістерезису:
- Прецизійні підшипники: Високоякісні лінійні напрямні з мінімальним люфтом
- Ущільнення з низьким коефіцієнтом тертя: Сучасні матеріали та конструкції ущільнень
- Жорсткі муфти: Усунути джерела механічного люфту
- Попередньо завантажені системи: Механічне зміщення для усунення мертвих зон
Вдосконалення архітектури системи
Проектуйте механічні системи таким чином, щоб мінімізувати джерела гістерезису:
| Конструктивна особливість | Зменшення гістерезису | Вартість реалізації | Вплив на технічне обслуговування |
|---|---|---|---|
| Прямий привід | 80-90% | Високий | Низький |
| Завантажені посібники | 60-70% | Середній | Середній |
| Прецизійні муфти | 40-50% | Низький | Низький |
| Протизазорні шестерні | 70-80% | Середній | Високий |
Удосконалення системи управління
Методи компенсації програмного забезпечення
Удосконалені алгоритми управління можуть значно зменшити ефекти гістерезису:
- Картування гістерезису: Таблиці пошуку для корекції положення
- Прямий контроль: Прогнозна компенсація на основі напрямку команди
- Адаптивні алгоритми: Самонавчальна компенсація гістерезису
- Модельно-орієнтоване управління: Прогнозування гістерезису на основі фізичних законів
Вдосконалення системи зворотного зв'язку
Покращені системи зворотного зв'язку забезпечують кращу компенсацію гістерезису:
- Кодери з більш високою роздільною здатністю: Покращена точність вимірювання положення
- Кілька датчиків зворотного зв'язку: Резервне вимірювання положення
- Зворотний зв'язок по швидкості: Алгоритми компенсації на основі ставки
- Силовий зворотний зв'язок: Компенсація гістерезису, що залежить від навантаження
Стратегії контролю навколишнього середовища
Управління температурою
Стабільні робочі температури зменшують коливання гістерезису:
- Теплоізоляція: Захищайте приводи від перепадів температури
- Активне охолодження: Підтримуйте стабільну робочу температуру
- Компенсація температури: Програмне корегування теплових ефектів
- Термічна попередня обробка: Дозвольте системам досягти теплової рівноваги
Стабілізація навантаження
Постійні умови навантаження мінімізують коливання гістерезису:
- Ізоляція навантаження: Відокремлення зовнішніх перешкод
- Врівноваження: Зменшити вплив гравітаційного навантаження
- Гальмування вібрації: Мінімізуйте динамічні коливання навантаження
- Оптимізація процесів: Зменшити змінні зовнішні сили
Сара, інженер-технолог на фармацевтичному пакувальному підприємстві в Колорадо, впровадила нашу комплексну програму зменшення гістерезису. Точність підрахунку таблеток покращилася з 98,51 TP3T до 99,81 TP3T, що відповідає вимогам FDA, а також дозволило зменшити відходи на 1 TP4T25 000 щомісяця. 💊
Передові методи компенсації
Застосування сигналу дрожання
Високочастотне збудження може подолати гістерезис, спричинений тертям:
- Вибір частоти: Виберіть частоти вище пропускної здатності системи
- Оптимізація амплітуди: Збалансуйте ефективність та стабільність системи
- Дизайн хвильової форми: Синусоїдальні, трикутні або випадкові сигнали
- Методи реалізації: Генерація апаратного або програмного забезпечення
Методи прогнозного управління
Модельно-орієнтовані підходи забезпечують чудову компенсацію гістерезису:
- Ідентифікація системи: Розробка математичної моделі
- Фільтрація Калмана: Оцінка оптимального стану
- Модельне прогнозне управління: Оптимізація майбутнього стану
- Адаптивне моделювання: Оновлення параметрів моделі в режимі реального часу
Технічне обслуговування та калібрування
Регулярні процедури калібрування
Систематична калібрування підтримує низький рівень гістерезису:
- Періодичне відображення гістерезису: Зміни в роботі з документами
- Перевірка компонентів: Визначити погіршення стану, пов'язане із зносом
- Технічне обслуговування змащення: Підтримуйте оптимальний рівень тертя
- Перевірка вирівнювання: Забезпечте механічну точність
Стратегії прогнозованого технічного обслуговування
Профілактичне обслуговування запобігає погіршенню гістерезису:
- Тренд продуктивності: Відстежуйте зміни гістерезису з часом
- Відстеження терміну служби компонентів: Замінюйте компоненти до виходу з ладу
- Моніторинг стану: Постійна оцінка стану системи
- Профілактична заміна: Плануйте технічне обслуговування на основі використання
У Bepto наші пакети для зменшення гістерезису зазвичай забезпечують поліпшення точності позиціонування на 70-85%, а багато клієнтів повідомляють про рівні гістерезису нижче 0,5% у своїх найвимогливіших застосуваннях — це продуктивність, яка безпосередньо перетворюється на вищу якість продукції та зменшення відходів. 🎯
Висновок
Розуміння та контроль гістерезису є необхідними для досягнення точного пропорційного управління приводом, що вимагає систематичних вимірювань, цілеспрямованої компенсації та постійного технічного обслуговування для забезпечення оптимальної роботи.
Часті запитання про гістерезис у пропорційному керуванні приводом
Питання: Що вважається прийнятним гістерезисом у пропорційних системах приводів?
Прийнятний рівень гістерезису залежить від вимог застосування: загальна автоматизація допускає 2-5%, точне складання вимагає менше 1%, а надточні застосування вимагають рівня гістерезису менше 0,5%. Наші системи Bepto зазвичай досягають гістерезису 0,3-0,8% при правильному впровадженні.
Питання: Чи може програмне забезпечення повністю усунути механічний гістерезис?
Програмна компенсація може зменшити гістерезис на 60-80%, але не може повністю усунути механічні джерела, такі як люфт і тертя. Поєднання механічних удосконалень із програмною компенсацією дозволяє досягти найкращих результатів, як правило, загальний гістерезис системи становить менше 1%.
Питання: Як часто слід перекалібрувати пропорційну систему управління для гістерезису?
Частота калібрування залежить від інтенсивності використання та вимог до точності: високоточні системи потребують щомісячного калібрування, загальні застосування вимагають щоквартальних перевірок, а системи з низькою точністю можуть використовувати щорічні графіки калібрування з постійним моніторингом продуктивності.
Питання: Яка різниця між гістерезисом і люфтом в системах приводів?
Люфт — це механічний зазор у з'єднаннях і шестернях, тоді як гістерезис включає всі ефекти, що залежать від положення, включаючи тертя, магнітні ефекти та мертві зони системи управління. Люфт є одним із компонентів загального гістерезису системи.
Питання: Як дізнатися, чи є гістерезис причиною проблем з позиціонуванням?
Гістерезис створює характерні закономірності: постійні помилки позиціонування, що залежать від напрямку наближення, різну точність при русі вгору та вниз, а також повторювані закономірності помилок. Тести двонаправленого позиціонування виявляють петлі гістерезису, що підтверджують діагноз.
-
Дізнайтеся про фізичні принципи гістерезису та його вплив на точність у різних галузях інженерії. ↩
-
Розуміти причини та інженерні рішення для усунення люфту в механічних з'єднаннях. ↩
-
Вивчіть внутрішню механіку та принципи роботи пропорційних пневматичних регулювальних клапанів. ↩
-
Дізнайтеся про механізми, що лежать в основі явища «stick-slip», та про те, як воно впливає на рух приводу на низькій швидкості. ↩
-
Отримайте глибше розуміння теорії ПІД-регулювання та її застосування в промисловій автоматизації. ↩
