

Hystérésis1 est le tueur invisible qui se cache dans chaque système d'actionneur proportionnel, détruisant silencieusement la précision de positionnement jusqu'à 15%, tandis que les ingénieurs rejettent la faute sur tout sauf le véritable coupable. Ce phénomène fait que les actionneurs “ mémorisent ” leurs positions précédentes, créant des zones mortes imprévisibles qui transforment un contrôle fluide en une incohérence frustrante. 😠
L'hystérésis dans la commande proportionnelle de l'actionneur génère des erreurs de positionnement de 2 à 151 TP3T de la course totale en raison du jeu mécanique, du frottement des joints, des effets magnétiques et des bandes mortes de la vanne de commande, ce qui nécessite une compensation par des algorithmes logiciels, une précharge mécanique, un retour d'information à plus haute résolution et une sélection appropriée des composants pour obtenir une précision de positionnement inférieure à 11 TP3T.
Il y a deux mois, j'ai travaillé avec Jennifer, ingénieure en contrôle-commande dans une usine de fabrication aérospatiale à Seattle, dont les robots d'assemblage de précision manquaient systématiquement leurs cibles de 3 mm, non pas de manière aléatoire, mais selon un schéma prévisible qui trahissait une hystérésis. Après avoir mis en œuvre nos solutions anti-hystérésis Bepto, ses erreurs de positionnement sont tombées à moins de 0,5 mm. ✈️
Table des matières
- Qu'est-ce que l'hystérésis exactement et pourquoi se produit-elle dans les actionneurs proportionnels ?
- Quel est l'impact de l'hystérésis sur les différents types de systèmes de régulation proportionnelle ?
- Quelles techniques de mesure permettent le mieux d'identifier et de quantifier les effets d'hystérésis ?
- Quelles sont les méthodes les plus efficaces pour minimiser l'hystérésis dans votre système ?
Qu'est-ce que l'hystérésis exactement et pourquoi se produit-elle dans les actionneurs proportionnels ?
Il est essentiel de comprendre les mécanismes d'hystérésis pour obtenir un contrôle proportionnel précis dans les systèmes d'actionneurs pneumatiques et hydrauliques.
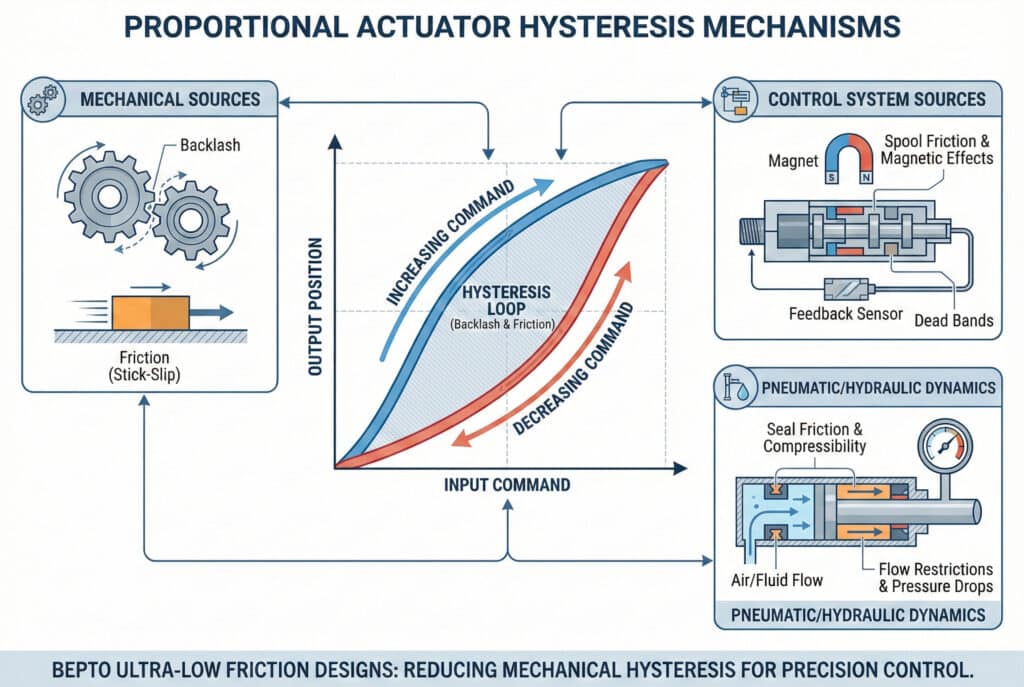
L'hystérésis se produit lorsque la position de sortie de l'actionneur dépend à la fois de la commande d'entrée actuelle et de l'historique des positions précédentes, créant ainsi des chemins de réponse différents pour les commandes d'augmentation et de diminution en raison du jeu mécanique, des forces de frottement, des effets magnétiques et des bandes mortes des vannes de régulation qui s'accumulent tout au long de la boucle de régulation.
Mécanismes fondamentaux de l'hystérésis
Sources mécaniques
Les composants physiques contribuent de manière significative à l'hystérésis du système :
- Retour de flamme2: Les trains d'engrenages, les accouplements et les raccords créent des zones mortes.
- Friction : Les différences entre frottement statique et frottement cinétique provoquent un comportement de glissement saccadé.
- Conformité : Déformation élastique dans les liaisons mécaniques
- Modèles d'usure : L'usure des composants crée des surfaces de contact irrégulières.
Sources du système de contrôle
Les éléments de commande électroniques et pneumatiques ajoutent une hystérésis :
| Type de composant | Hystérésis typique | Cause première | Stratégie d'atténuation |
|---|---|---|---|
| Servovalves | 0.1-0.5% | Friction de la bobine | Dither haute fréquence |
| Vannes proportionnelles3 | 0.5-2% | Hystérésis magnétique | Compensation de rétroaction |
| Capteurs de position | 0.05-0.2% | Bruit électronique | Filtrage du signal |
| Amplificateurs | 0.1-0.3% | Réglages de la bande morte | Réglage de l'étalonnage |
Origines physiques dans les systèmes pneumatiques
Effets de frottement des joints
Les joints pneumatiques créent d'importantes sources d'hystérésis :
- Friction de rupture : Force plus élevée nécessaire pour initier le mouvement
- Friction de roulement : Force réduite pendant le mouvement continu
- comportement de collage et de glissement4: Mouvement irrégulier à faible vitesse
- Dépendance à la température : La friction varie en fonction de la température de fonctionnement.
Dynamique de la pression
Les effets de la pression du système pneumatique contribuent à l'hystérésis :
- Compressibilité : La compression de l'air crée un comportement semblable à celui d'un ressort.
- Restrictions de débit : Les restrictions relatives aux vannes et aux raccords entraînent des retards
- Chutes de pression : Les pertes en ligne créent des forces dépendantes de la position
- Effets de la température : La dilatation thermique affecte la rigidité du système.
Chez Bepto, nous avons conçu nos vérins sans tige avec des joints à très faible frottement et des systèmes de guidage usinés avec précision qui réduisent l'hystérésis mécanique de 60% par rapport aux modèles standard, ce qui est essentiel pour les applications de contrôle proportionnel de haute précision. 🎯
Hystérésis dépendante de la charge
Effets des charges variables
Les charges externes influencent considérablement les caractéristiques d'hystérésis :
- Charges gravitationnelles : Variations de force dépendantes de la position
- Charges inertielles : Exigences en matière de force dépendante de l'accélération
- Charges de traitement : Forces externes variables pendant le fonctionnement
- Charges de frottement : Variations de la force de contact superficielle
Interactions dynamiques des charges
Les charges en mouvement créent des modèles d'hystérésis complexes :
- Effets d'accélération : Forces d'inertie lors des changements de vitesse
- Accouplement à vibration : Les vibrations externes affectent le positionnement
- Interactions de résonance : Excitation à fréquence naturelle
- Variations d'amortissement : Caractéristiques d'amortissement dépendantes de la charge
Quel est l'impact de l'hystérésis sur les différents types de systèmes de régulation proportionnelle ?
Les effets d'hystérésis varient considérablement selon les différentes technologies d'actionneurs et architectures de commande, ce qui nécessite des stratégies de compensation sur mesure.
Les systèmes proportionnels en boucle ouverte présentent des erreurs d'hystérésis de 5 à 151 TP3T sans capacité de correction, tandis que les systèmes en boucle fermée peuvent réduire l'hystérésis à 0,5-21 TP3T grâce à la compensation par rétroaction. Les systèmes servo avancés atteignent une précision inférieure à 0,11 TP3T à l'aide d'encodeurs haute résolution et d'algorithmes de contrôle sophistiqués.
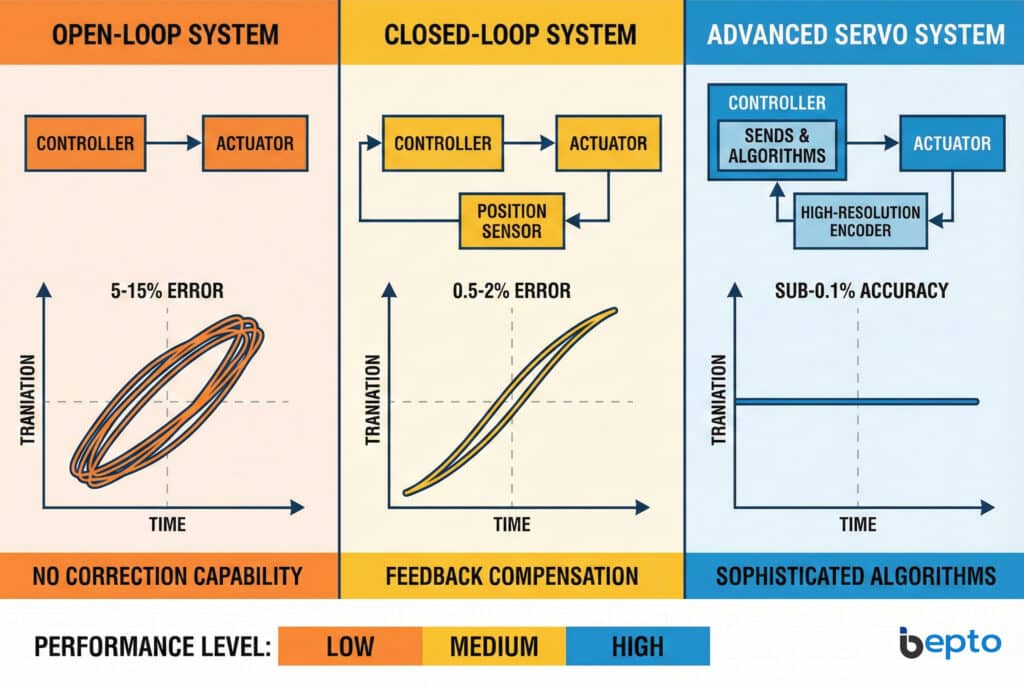
Systèmes de commande en boucle ouverte
Limites inhérentes
Les systèmes en boucle ouverte ne peuvent pas compenser les effets d'hystérésis :
- Aucune correction des commentaires : Les erreurs s'accumulent sans être détectées.
- Modèles prévisibles : L'hystérésis génère des erreurs de positionnement répétitives.
- Sensibilité à la température : Les performances varient en fonction des conditions d'utilisation.
- Dépendance à l'égard de la charge : Différentes charges créent différents modèles d'hystérésis.
Caractéristiques de performance typiques
Les performances d'hystérésis du système en boucle ouverte varient selon l'application :
| Type d'application | Plage d'hystérésis | Utilisations acceptables | Limitations des performances |
|---|---|---|---|
| Un positionnement simple | 5-15% | Tâches non critiques | Faible répétabilité |
| Contrôle de la vitesse | 3-8% | Régulation approximative de la vitesse | Performance variable |
| Contrôle des forces | 10-25% | Applications de la force de base | Sortie incohérente |
| Systèmes multiaxes | 8-20% | Automatisation simple | Erreurs cumulées |
Systèmes de contrôle en boucle fermée
Avantages liés à la compensation des commentaires
Les systèmes en boucle fermée peuvent compenser activement l'hystérésis :
- Détection d'erreurs : Surveillance continue de la position
- Correction en temps réel : Réponse immédiate aux erreurs de positionnement
- Contrôle adaptatif : Les algorithmes d'apprentissage améliorent les performances
- Rejet des perturbations : Compensation des forces externes
Efficacité de l'algorithme de contrôle
Différentes stratégies de contrôle gèrent l'hystérésis avec plus ou moins de succès :
- régulation PID5: Compensation de base, hystérésis résiduelle 2-5%
- Contrôle par anticipation : Compensation prédictive, résiduel 1-3%
- Contrôle adaptatif : Apprentissage de la compensation, résiduel 0,5-2%
- Contrôle basé sur un modèle : Compensation théorique, résidu 0,1-1%
Systèmes de commande asservie
Techniques avancées de rémunération
Les servosystèmes haute performance utilisent une compensation d'hystérésis sophistiquée :
- Cartographie de l'hystérésis : Caractérisation du système et tableaux de compensation
- Techniques de précharge : Biais mécanique pour éliminer les zones mortes
- Signaux de tramage : Excitation à haute fréquence pour surmonter la friction
- Algorithmes prédictifs : Prévision de l'hystérésis basée sur un modèle
Michael, ingénieur en robotique dans une usine de fabrication de précision en Caroline du Nord, a mis en œuvre les mises à niveau recommandées pour le servocontrôle sur sa chaîne de montage. La précision de positionnement est passée de ±2,5 mm à ±0,3 mm, ce qui a permis de réduire les défauts de fabrication de 75% et d'économiser $50 000 dollars par mois en coûts de retouche. 🤖
Les défis liés aux systèmes multiaxes
Effets cumulatifs
Les actionneurs multiples aggravent les problèmes d'hystérésis :
- Accumulation d'erreurs : Les erreurs individuelles des axes se combinent
- Effets de couplage : Les interactions entre les axes créent des motifs complexes.
- Problèmes de synchronisation : Différents modèles d'hystérésis causent des problèmes de coordination.
- Complexité de l'étalonnage : Plusieurs systèmes nécessitent un réglage individuel
Stratégies de coordination
Les systèmes multiaxes avancés utilisent des techniques spécialisées :
- Commande maître-esclave : Un axe montre la voie, les autres suivent
- Compensation du couplage croisé : Correction de l'interaction des axes
- Positionnement synchronisé : Profils de mouvement coordonnés
- Optimisation globale : Optimisation des performances à l'échelle du système
Quelles techniques de mesure permettent le mieux d'identifier et de quantifier les effets d'hystérésis ?
Une mesure et une caractérisation précises de l'hystérésis permettent de développer une stratégie de compensation efficace et d'optimiser le système.
La mesure de l'hystérésis nécessite des tests de positionnement bidirectionnels avec des codeurs haute résolution, l'enregistrement des relations entre la position et la commande tout au long des cycles complets, l'analyse de la largeur de boucle et des modèles d'asymétrie, ainsi que la documentation des dépendances à la température et à la charge afin de créer des cartes de compensation complètes pour une performance de contrôle optimale.
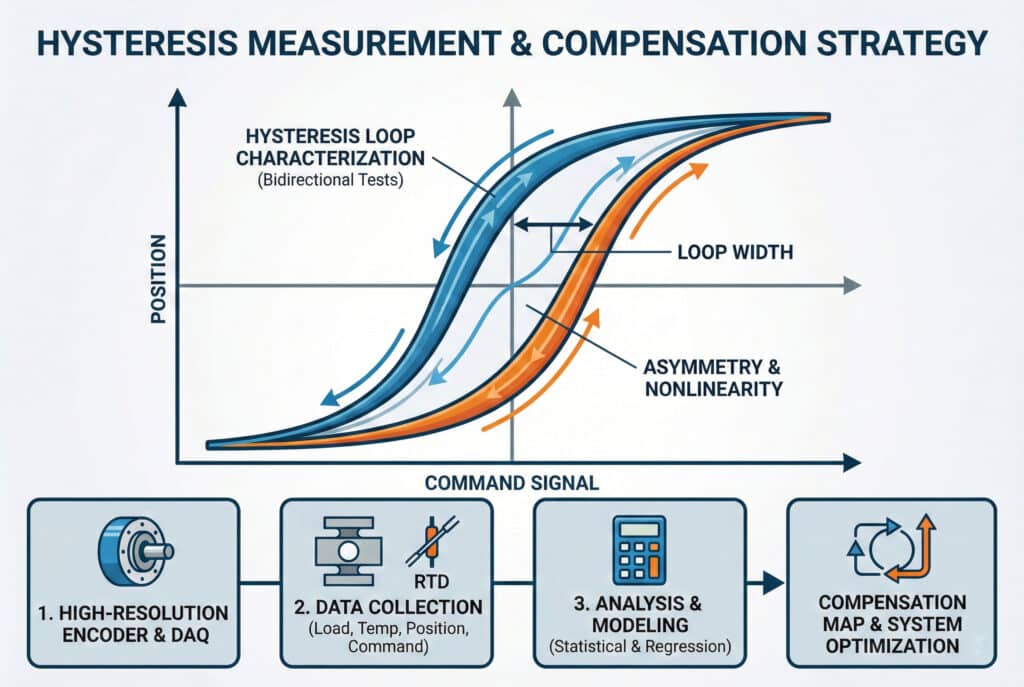
Protocoles de mesure standard
Tests de positionnement bidirectionnels
Une caractérisation complète de l'hystérésis nécessite des essais systématiques :
- Cycles complets : Séquences complètes d'extension et de rétraction
- Plusieurs vitesses : Différents profils de vitesse pour identifier les dépendances de vitesse
- Variations de charge : Différentes charges externes pour cartographier les effets de charge
- Plages de température : Évaluation de l'impact de la température de fonctionnement
Exigences en matière de collecte de données
Une mesure précise de l'hystérésis nécessite des instruments de haute qualité :
| Paramètre de mesure | Résolution requise | Équipement typique | Cible de précision |
|---|---|---|---|
| Retour d'information sur la position | 0,011 TP3T de course | Codeur linéaire | ±0,0051 TP3T |
| Signal de commande | 12 bits minimum | système d'acquisition de données | ±0,1% |
| Mesure de charge | 1% de force nominale | Cellule de charge | ±0,5% |
| Température | ±1°C | Capteur RTD | ±0.5°C |
Techniques d'analyse
Caractérisation de la boucle d'hystérésis
L'analyse mathématique révèle des caractéristiques d'hystérésis :
- Largeur de boucle : Différence de position maximale pour une même commande
- Asymétrie : Biais directionnel dans les erreurs de positionnement
- Non-linéarité : Écart par rapport à la réponse linéaire idéale
- Répétabilité : Cohérence entre plusieurs cycles
Méthodes d'analyse statistique
Des techniques d'analyse avancées quantifient les effets d'hystérésis :
- Écart type : Mesure de la répétabilité du positionnement
- Analyse de corrélation : Force de la relation entre les intrants et les extrants
- Analyse de fréquence : Caractéristiques de réponse dynamique
- Analyse de régression : Développement de modèles mathématiques
Systèmes de surveillance en temps réel
Suivi continu de l'hystérésis
Les systèmes de production bénéficient d'une surveillance continue de l'hystérésis :
- Capteurs intégrés : Systèmes intégrés de rétroaction de position
- Enregistrement des données : Enregistrement continu des performances
- Analyse des tendances : Suivi de la dégradation des performances à long terme
- Maintenance prédictive : Avertissement précoce de l'usure des composants
Nos systèmes de diagnostic Bepto incluent une surveillance en temps réel de l'hystérésis qui alerte les opérateurs lorsque les erreurs de positionnement dépassent les seuils de 0,51 TP3T, permettant ainsi une maintenance proactive avant que la précision ne se dégrade à des niveaux inacceptables. 📊
Évaluation de l'impact environnemental
Effets de la température
La température influence considérablement les caractéristiques d'hystérésis :
- Dilatation thermique : Modifications des dimensions mécaniques
- Changements de viscosité : Variations des propriétés des fluides
- Propriétés du matériau : Dépendance de la température du module d'élasticité
- Performance des joints : Variations du coefficient de frottement
Analyse de la dépendance à la charge
Les charges externes créent des modèles d'hystérésis complexes :
- Charges statiques : Effets d'une force constante sur le positionnement
- Charges dynamiques : Impact à force variable pendant le mouvement
- Effets inertiels : Erreurs de positionnement dépendantes de l'accélération
- Variations de friction : Impact de l'état de surface sur les performances
Quelles sont les méthodes les plus efficaces pour minimiser l'hystérésis dans votre système ?
La mise en œuvre de stratégies complètes de réduction de l'hystérésis permet d'atteindre une précision de positionnement inférieure à 11 TP3T dans les applications exigeantes de contrôle proportionnel.
Une minimisation efficace de l'hystérésis combine des améliorations mécaniques, notamment des composants à faible frottement et l'élimination du jeu, des améliorations du système de contrôle avec compensation anticipative et des algorithmes adaptatifs, ainsi que des contrôles environnementaux pour la stabilité de la température et de la charge, réduisant généralement l'hystérésis de 5-15% à moins de 1% de la pleine échelle.
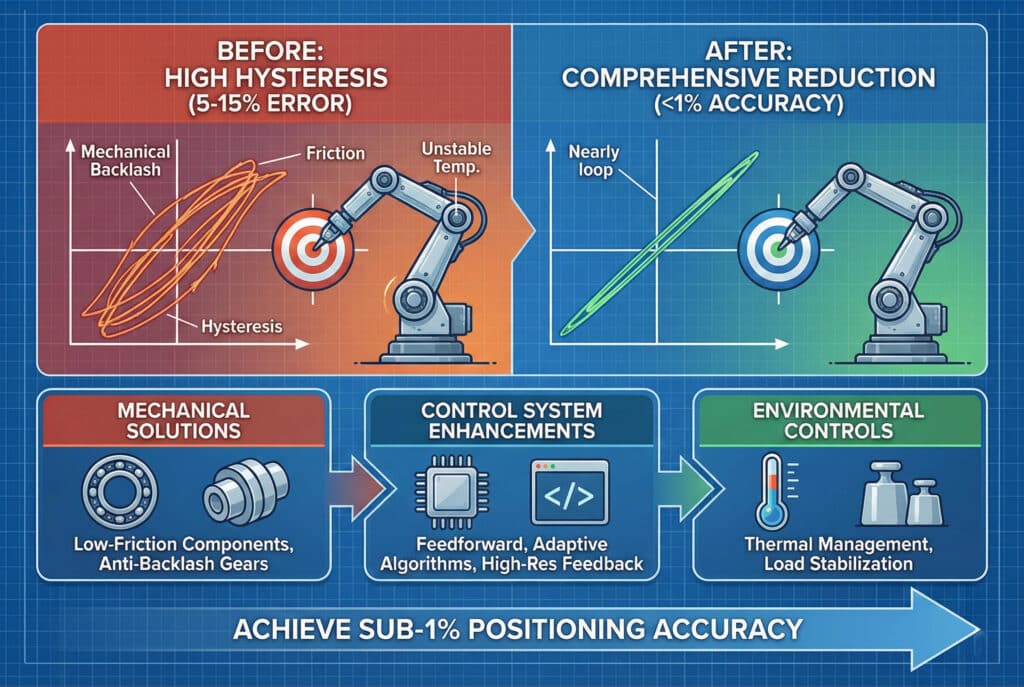
Solutions mécaniques
Sélection et conception des composants
Choisissez des composants spécialement conçus pour une faible hystérésis :
- Roulements de précision : Guides linéaires de haute qualité avec un jeu minimal
- Joints à faible friction : Matériaux et conceptions avancés pour joints d'étanchéité
- Accouplements rigides : Éliminer les sources de jeu mécanique
- Systèmes préchargés : Biais mécanique pour éliminer les zones mortes
Améliorations de l'architecture du système
Concevoir des systèmes mécaniques afin de minimiser les sources d'hystérésis :
| Caractéristiques de la conception | Réduction de l'hystérésis | Coût de la mise en œuvre | Impact de la maintenance |
|---|---|---|---|
| Entraînement direct | 80-90% | Haut | Faible |
| Guides préchargés | 60-70% | Moyen | Moyen |
| Accouplements de précision | 40-50% | Faible | Faible |
| Engrenages anti-recul | 70-80% | Moyen | Haut |
Amélioration du système de contrôle
Techniques de compensation logicielle
Des algorithmes de contrôle avancés peuvent réduire considérablement les effets d'hystérésis :
- Cartographie de l'hystérésis : Tables de consultation pour la correction de position
- Contrôle par anticipation : Compensation prédictive basée sur la direction de commande
- Algorithmes adaptatifs : Compensation d'hystérésis par auto-apprentissage
- Contrôle basé sur un modèle : Prévision de l'hystérésis basée sur la physique
Améliorations apportées au système de rétroaction
Des systèmes de rétroaction améliorés permettent une meilleure compensation de l'hystérésis :
- Encodeurs à haute résolution : Amélioration de la précision de la mesure de position
- Capteurs de rétroaction multiples : Mesure redondante de position
- Retour de vitesse : Algorithmes de rémunération basés sur les taux
- Retour de force : Compensation d'hystérésis dépendante de la charge
Stratégies de contrôle environnemental
Gestion de la température
Des températures de fonctionnement stables réduisent les variations d'hystérésis :
- Isolation thermique : Protéger les actionneurs contre les variations de température
- Refroidissement actif : Maintenir des températures de fonctionnement constantes
- Compensation de la température : Correction logicielle des effets thermiques
- Préconditionnement thermique : Permettre aux systèmes d'atteindre l'équilibre thermique
Stabilisation de la charge
Des conditions de chargement constantes minimisent les variations d'hystérésis :
- Isolation de charge : Découpler les perturbations externes
- Contrepoids : Réduire les effets de la charge gravitationnelle
- Amortissement des vibrations : Réduire au minimum les variations de charge dynamiques
- Optimisation des processus : Réduire les forces externes variables
Sarah, ingénieure des procédés dans une usine d'emballage pharmaceutique du Colorado, a mis en œuvre notre programme complet de réduction de l'hystérésis. La précision de son comptage de comprimés est passée de 98,51 TP3T à 99,81 TP3T, répondant ainsi aux exigences de la FDA tout en réduisant les déchets de 1 TP4T25 000 par mois. 💊
Techniques avancées de rémunération
Application du signal de tramage
L'excitation à haute fréquence peut surmonter l'hystérésis due au frottement :
- Sélection de la fréquence : Choisissez des fréquences supérieures à la bande passante du système.
- Optimisation de l'amplitude : Équilibrer l'efficacité et la stabilité du système
- Conception de la forme d'onde : Signaux sinusoïdaux, triangulaires ou aléatoires
- Méthodes de mise en œuvre : Génération matérielle ou logicielle
Méthodes de contrôle prédictif
Les approches basées sur des modèles offrent une compensation d'hystérésis supérieure :
- Identification du système : Développement de modèles mathématiques
- Filtrage de Kalman : Estimation optimale de l'état
- Contrôle prédictif du modèle : Optimisation de l'état futur
- Modélisation adaptative : Mises à jour en temps réel des paramètres du modèle
Maintenance et étalonnage
Procédures d'étalonnage régulières
L'étalonnage systématique maintient des performances à faible hystérésis :
- Cartographie périodique de l'hystérésis : Documenter les changements de performance
- Inspection des composants : Identifier la dégradation liée à l'usure
- Entretien de la lubrification : Maintenir des niveaux de friction optimaux
- Vérification de l'alignement : Garantir la précision mécanique
Stratégies de maintenance prédictive
La maintenance proactive empêche la dégradation par hystérésis :
- Tendance en matière de performances : Suivre les changements d'hystérésis au fil du temps
- Suivi de la durée de vie des composants : Remplacer les composants avant qu'ils ne tombent en panne
- Surveillance de l'état : Évaluation continue de l'état du système
- Remplacement préventif : Planifier la maintenance en fonction de l'utilisation
Chez Bepto, nos solutions de réduction de l'hystérésis permettent généralement d'améliorer la précision de positionnement de 70 à 851 TP3T. De nombreux clients font état de niveaux d'hystérésis inférieurs à 0,51 TP3T dans leurs applications les plus exigeantes, ce qui se traduit directement par une meilleure qualité des produits et une réduction des déchets. 🎯
Conclusion
Il est essentiel de comprendre et de contrôler l'hystérésis pour obtenir un contrôle proportionnel précis des actionneurs, ce qui nécessite des mesures systématiques, une compensation ciblée et une maintenance continue pour des performances optimales.
FAQ sur l'hystérésis dans la commande proportionnelle des actionneurs
Q : Quelle est la valeur acceptable pour l'hystérésis dans les systèmes d'actionneurs proportionnels ?
L'hystérésis acceptable dépend des exigences de l'application : l'automatisation générale tolère 2-5%, l'assemblage de précision nécessite moins de 1% et les applications ultra-précises exigent des niveaux d'hystérésis inférieurs à 0,5%. Nos systèmes Bepto atteignent généralement une hystérésis de 0,3-0,8% lorsqu'ils sont correctement mis en œuvre.
Q : La compensation logicielle peut-elle éliminer complètement l'hystérésis mécanique ?
La compensation logicielle peut réduire l'hystérésis de 60 à 80%, mais ne peut pas éliminer complètement les sources mécaniques telles que le jeu et le frottement. La combinaison d'améliorations mécaniques et d'une compensation logicielle permet d'obtenir les meilleurs résultats, généralement avec une hystérésis totale du système inférieure à 1%.
Q : À quelle fréquence dois-je recalibrer mon système de contrôle proportionnel pour l'hystérésis ?
La fréquence d'étalonnage dépend de l'intensité d'utilisation et des exigences de précision : les systèmes de haute précision doivent être étalonnés tous les mois, les applications générales nécessitent des contrôles trimestriels et les systèmes de faible précision peuvent être étalonnés une fois par an, avec une surveillance continue des performances.
Q : Quelle est la différence entre l'hystérésis et le jeu dans les systèmes d'actionneurs ?
Le jeu mécanique correspond au jeu présent dans les connexions et les engrenages, tandis que l'hystérésis englobe tous les effets liés à la position, notamment le frottement, les effets magnétiques et les bandes mortes du système de commande. Le jeu mécanique est l'un des composants de l'hystérésis totale du système.
Q : Comment savoir si l'hystérésis est à l'origine de mes problèmes de positionnement ?
L'hystérésis crée des schémas caractéristiques : des erreurs de positionnement constantes qui dépendent de la direction d'approche, une précision différente lors des mouvements ascendants et descendants, et des schémas d'erreurs répétitifs. Les tests de positionnement bidirectionnels révèlent des boucles d'hystérésis qui confirment le diagnostic.
-
Découvrez les principes physiques de l'hystérésis et son impact sur la précision dans différentes disciplines de l'ingénierie. ↩
-
Comprendre les causes et les solutions techniques permettant d'éliminer le jeu dans les liaisons mécaniques. ↩
-
Découvrez le fonctionnement interne et les principes opérationnels des vannes de régulation pneumatiques proportionnelles. ↩
-
Découvrez les mécanismes à l'origine du phénomène de glissement saccadé et son incidence sur le mouvement des actionneurs à faible vitesse. ↩
-
Approfondissez vos connaissances sur la théorie du contrôle PID et son application dans l'automatisation industrielle. ↩
