

Εισαγωγή
Δυσκολεύεστε να επιλέξετε τη σωστή στρατηγική ελέγχου για την εφαρμογή του έξυπνου πνευματικού κυλίνδρου σας; 🤔 Πολλοί μηχανικοί αντιμετωπίζουν σύγχυση όταν πρέπει να επιλέξουν μεταξύ των τρόπων ελέγχου δύναμης και ελέγχου θέσης, με αποτέλεσμα μη βέλτιστη απόδοση, ζημιά στο προϊόν ή αναποτελεσματικές διαδικασίες. Η λάθος επιλογή μπορεί να σημαίνει τη διαφορά μεταξύ ομαλής λειτουργίας και δαπανηρών βλαβών.
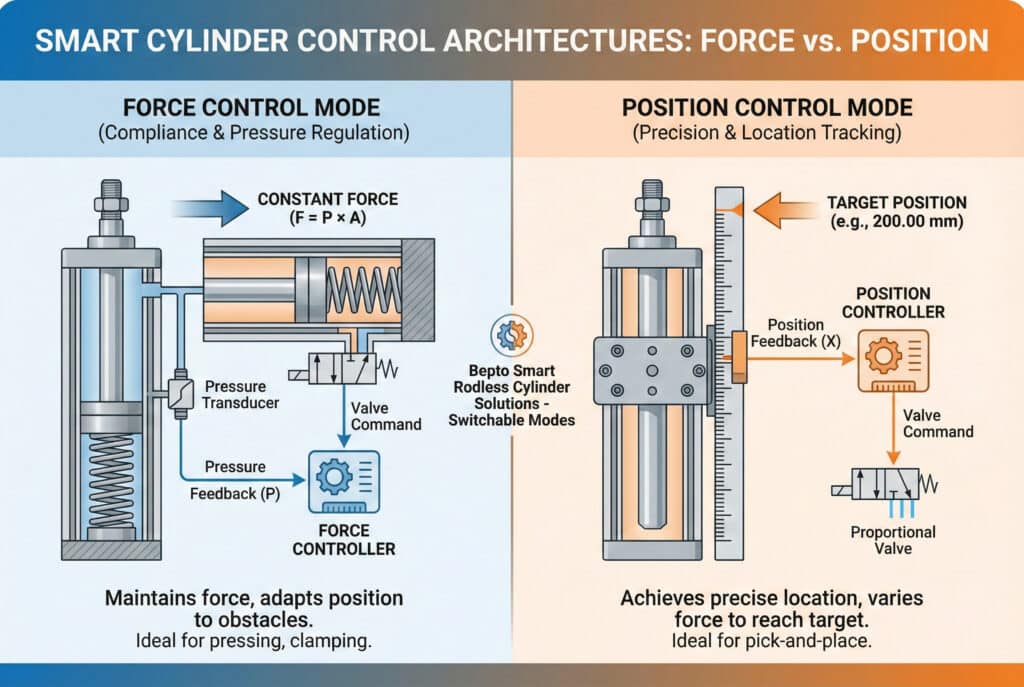
Η λειτουργία ελέγχου δύναμης ρυθμίζει την πίεση ή την ισχύ ενός έξυπνου κυλίνδρου για να διατηρεί σταθερή τη δύναμη ώθησης/έλξης ανεξάρτητα από τη θέση, ιδανική για εργασίες πίεσης, σύσφιξης και συναρμολόγησης. Η λειτουργία ελέγχου θέσης εστιάζει στην επίτευξη και διατήρηση της ακριβούς θέσης του φορείου κατά μήκος της διαδρομής, ιδανική για εργασίες συλλογής και τοποθέτησης, ταξινόμησης και τοποθέτησης. Η επιλογή εξαρτάται από το αν η εφαρμογή σας δίνει προτεραιότητα στο “πόσο σκληρά” (δύναμη) ή “πού ακριβώς” (θέση) ενεργεί ο κύλινδρος.
Τον περασμένο μήνα, συμβουλεύτηκα τη Rachel, μηχανικό διεργασιών σε ένα εργοστάσιο συναρμολόγησης αυτοκινήτων στο Κλίβελαντ του Οχάιο. Η ομάδα της χρησιμοποιούσε έλεγχο θέσης για τη διαδικασία εγκατάστασης πάνελ πορτών, αλλά τα πάνελ ράγιζαν λόγω της ασυνεπούς εφαρμογής δύναμης. Αφού αλλάξαμε τον έξυπνο κύλινδρο χωρίς ράβδο Bepto σε λειτουργία ελέγχου δύναμης με ανάδραση πίεσης, τα ποσοστά ελαττωμάτων μειώθηκαν από 8% σε λιγότερο από 0,5%. Η κατανόηση του πότε πρέπει να χρησιμοποιείται κάθε λειτουργία είναι κρίσιμη για την επιτυχία της εφαρμογής. 💡
Πίνακας περιεχομένων
- Ποια είναι η θεμελιώδης διαφορά μεταξύ ελέγχου δύναμης και ελέγχου θέσης;
- Πότε πρέπει να χρησιμοποιείτε τη λειτουργία ελέγχου δύναμης σε πνευματικές εφαρμογές;
- Πότε είναι η λειτουργία ελέγχου θέσης η καλύτερη επιλογή;
- Μπορείτε να συνδυάσετε και τους δύο τρόπους ελέγχου σε υβριδικές εφαρμογές;
Ποια είναι η θεμελιώδης διαφορά μεταξύ ελέγχου δύναμης και ελέγχου θέσης;
Η κατανόηση της βασικής διαφοράς μεταξύ αυτών των φιλοσοφιών ελέγχου είναι απαραίτητη για τη σωστή εφαρμογή της μηχανικής. ⚙️
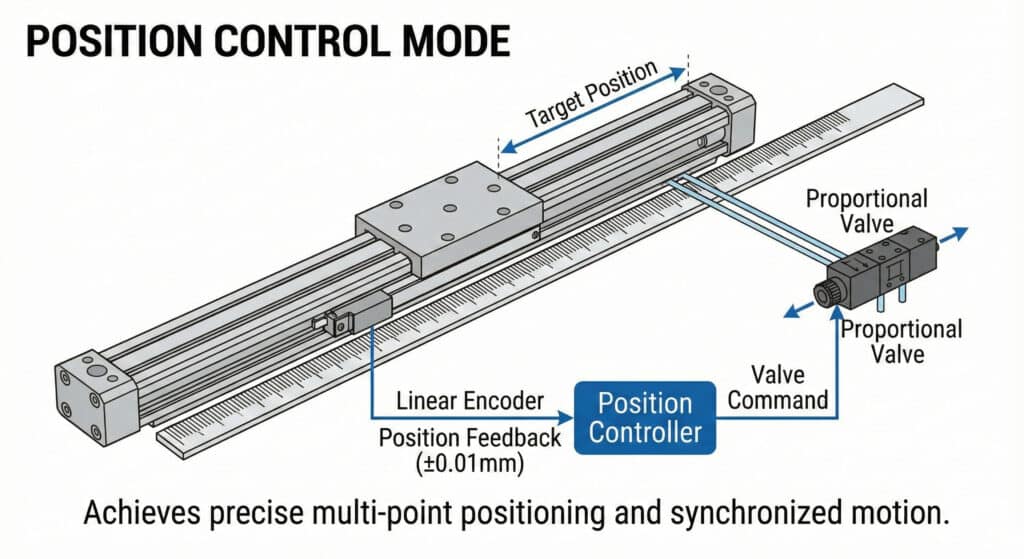
Η λειτουργία ελέγχου δύναμης χρησιμοποιεί αισθητήρες πίεσης ή παρακολούθηση ρεύματος για τη ρύθμιση της δύναμης εξόδου του κυλίνδρου, διατηρώντας σταθερή τη δύναμη ώθησης/έλξης ακόμη και όταν αλλάζει η θέση ή συναντώνται εμπόδια. Η λειτουργία ελέγχου θέσης χρησιμοποιεί γραμμικοί κωδικοποιητές1 ή μαγνητικούς αισθητήρες για την παρακολούθηση και τον έλεγχο της θέσης του φορείου με ακρίβεια συνήθως μεταξύ 0,01-0,5 mm, δίνοντας προτεραιότητα στην ακριβή τοποθέτηση έναντι της συνέπειας της δύναμης. Κάθε λειτουργία βελτιστοποιεί διαφορετικές παραμέτρους απόδοσης με βάση τις απαιτήσεις της εφαρμογής.
Βασικές αρχές του βρόχου ελέγχου
Αρχιτεκτονική ελέγχου δύναμης
Στη λειτουργία ελέγχου ισχύος, το σύστημα παρακολουθεί συνεχώς:
- Αισθητήρες πίεσης: Μέτρηση της πίεσης του θαλάμου σε πραγματικό χρόνο
- Υπολογισμός δύναμης: F = P × A (πίεση × εμβαδόν εμβόλου)
- Βρόχος ανατροφοδότησης: Ρυθμίζει τη θέση της βαλβίδας για να διατηρήσει τη δύναμη-στόχο
- Συμμόρφωση: Η θέση του κυλίνδρου ποικίλλει ανάλογα με τα χαρακτηριστικά του τεμαχίου εργασίας.
Ο ελεγκτής δεν ενδιαφέρεται για τη θέση του κυλίνδρου, αλλά μόνο για το αν εφαρμόζει τη σωστή δύναμη.
Αρχιτεκτονική ελέγχου θέσης
Τα συστήματα ελέγχου θέσης εστιάζουν στην τοποθεσία:
- Γραμμικός κωδικοποιητής: Παρακολουθεί την απόλυτη ή την επαυξητική θέση
- Σφάλμα θέσης: Υπολογίζει τη διαφορά από τον στόχο
- Προφίλ ταχύτητας: Ελέγχει την επιτάχυνση και την επιβράδυνση
- Μεταβολή της δύναμης: Η δύναμη εξόδου μεταβάλλεται ανάλογα με το φορτίο και την τριβή.
Σύγκριση βασικών επιδόσεων
| Χαρακτηριστικό | Έλεγχος δύναμης | Έλεγχος θέσης |
|---|---|---|
| Πρωτογενής ανατροφοδότηση | Πίεση/Δύναμη | Θέση/Τοποθεσία |
| Τυπική ακρίβεια | ±2-5% της δύναμης στόχου | ±0,01-0,5 mm |
| Αντιμετώπιση εμποδίων | Διατηρεί τη δύναμη, σταματά την κίνηση | Αυξάνει τη δύναμη για να φτάσει στη θέση |
| Καλύτερο για συμμόρφωση | Εξαιρετικό | Φτωχό |
| Επαναληψιμότητα | Δύναμη: Εξαιρετική / Θέση: Μεταβλητή | Θέση: Άριστη / Δύναμη: Μεταβλητή |
| Κόστος συστήματος | Μέτρια | Μέτρια-Υψηλή |
Στην Bepto, προσφέρουμε έξυπνες λύσεις κυλίνδρων χωρίς ράβδο με δύο τρόπους ελέγχου, επιτρέποντας στους μηχανικούς να επιλέξουν τη βέλτιστη στρατηγική για τη συγκεκριμένη εφαρμογή τους. Τα συστήματά μας μπορούν ακόμη και να εναλλάσσονται μεταξύ των δύο τρόπων κατά τη διάρκεια διαφορετικών φάσεων του ίδιου κύκλου. 🔄
Απαιτήσεις αισθητήρων
Απαιτήσεις ελέγχου δύναμης:
- Μετατροπείς πίεσης (τυπική περιοχή 0-10 bar)
- Αναλογικές ή σερβοβαλβίδες2 για ακριβή ρύθμιση της πίεσης
- Γρήγοροι βρόχοι ελέγχου (χρόνος κύκλου 1-5 ms)
Απαιτήσεις ελέγχου θέσης:
- Αισθητήρες γραμμικής θέσης (μαγνητικοί, οπτικοί ή μαγνητοσυσταλτικοί)
- Ανατροφοδότηση υψηλής ανάλυσης (0,01-0,1 mm)
- Προγνωστικά προφίλ κίνησης για ομαλή επιτάχυνση
Πότε πρέπει να χρησιμοποιείτε τη λειτουργία ελέγχου δύναμης σε πνευματικές εφαρμογές;
Ορισμένες εφαρμογές απαιτούν απολύτως έλεγχο δύναμης για λόγους ποιότητας και ασφάλειας. 🛡️
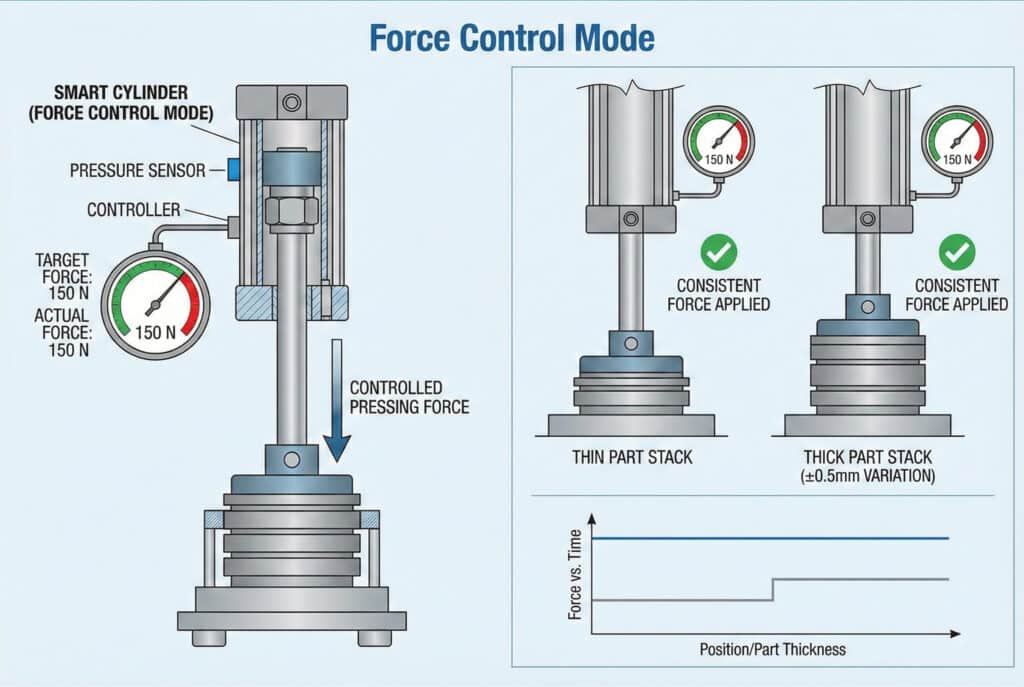
Η λειτουργία ελέγχου δύναμης υπερέχει σε εφαρμογές που απαιτούν: σταθερή δύναμη πίεσης ανεξάρτητα από τη διακύμανση του πάχους του εξαρτήματος (ανοχή ±0,5 mm), συμβατές εργασίες συναρμολόγησης όπου η υπερβολική δύναμη προκαλεί ζημιά, δοκιμές διασφάλισης ποιότητας που μετρούν καμπύλες δύναμης-μετατόπισης3, χειρισμός ευαίσθητων προϊόντων με απαλό άγγιγμα και προσαρμοστικές διαδικασίες όπου οι ιδιότητες του τεμαχίου ποικίλλουν. Οποιαδήποτε εφαρμογή όπου το “πόσο σκληρά” έχει μεγαλύτερη σημασία από το “ακριβώς πού” επωφελείται από τον έλεγχο δύναμης.
Ιδανικές εφαρμογές ελέγχου δύναμης
Συναρμολόγηση και πιεστικές εργασίες
Συναρμολόγηση με πίεση: Η εισαγωγή ρουλεμάν, δακτυλίων ή συνδετήρων απαιτεί ελεγχόμενη δύναμη για την αποφυγή ζημιών. Ο έλεγχος της δύναμης εξασφαλίζει ομοιόμορφη εισαγωγή χωρίς υπερβολική πίεση.
Συναρμολόγηση με κουμπώματα: Τα πλαστικά εξαρτήματα χρειάζονται ακριβή δύναμη για να κουμπώσουν τα κλιπ χωρίς να σπάσουν. Ο έλεγχος της δύναμης παρέχει την “αίσθηση” που αποτρέπει τα ελαττώματα.
Πίεση διανομής κόλλας: Η διατήρηση σταθερής δύναμης στα έμβολα διανομής εξασφαλίζει ομοιόμορφη ροή υλικού ανεξάρτητα από τις αλλαγές στο ιξώδες.
Πραγματική ιστορία επιτυχίας
Ο Thomas, διευθυντής παραγωγής σε μια μονάδα ηλεκτρονικών ειδών ευρείας κατανάλωσης στο Σαν Χοσέ της Καλιφόρνια, αντιμετώπιζε ποσοστά αστοχίας 12% σε μια διαδικασία συναρμολόγησης εξαρτημάτων smartphone. Οι κύλινδροι με έλεγχο θέσης που χρησιμοποιούσε οδηγούσαν τα εξαρτήματα σε ένα σταθερό βάθος, αλλά οι διακυμάνσεις στο πάχος των εξαρτημάτων είχαν ως αποτέλεσμα ορισμένα εξαρτήματα να δέχονται ανεπαρκή δύναμη, ενώ άλλα να σπάνε από υπερβολική δύναμη. Μετά τη μετάβαση σε κυλίνδρους χωρίς ράβδο με έλεγχο δύναμης Bepto ρυθμισμένους στα 150N, η διαδικασία του προσαρμόστηκε αυτόματα στις διακυμάνσεις των εξαρτημάτων — τα ελαττώματα μειώθηκαν στα 0,8% και ο χρόνος κύκλου βελτιώθηκε κατά 0,2 δευτερόλεπτα. 📱
Πλεονεκτήματα ελέγχου δύναμης
- Προσαρμοστικό στις μεταβολές: Αντισταθμίζει αυτόματα το μέρος συσσώρευση ανοχών4
- Αποτρέπει τη ζημιά: Σταματά την αύξηση της δύναμης όταν επιτευχθεί ο στόχος
- Ανατροφοδότηση ποιότητας: Τα δεδομένα δύναμης παρέχουν δυνατότητα παρακολούθησης της διαδικασίας
- Απαλός χειρισμός: Ιδανικό για εύθραυστα υλικά (γυαλί, κεραμικά, ηλεκτρονικά)
Κατηγορίες εφαρμογών
| Βιομηχανία | Τυπική εφαρμογή | Εύρος δύναμης στόχου | Βασικό όφελος |
|---|---|---|---|
| Αυτοκίνητο | Εγκατάσταση στεγανοποιητικών λωρίδων | 50-200N | Σταθερή σφράγιση χωρίς ζημιά |
| Ηλεκτρονική | Εισαγωγή εξαρτημάτων PCB | 10-80N | Αποτρέπει το σπάσιμο των σανίδων |
| Συσκευασία | Σφράγιση χαρτοκιβωτίων | 100-400N | Προσαρμόζεται στις διακυμάνσεις της στάθμης πλήρωσης |
| Ιατρική συσκευή | Συγκρότημα καθετήρα | 5-30N | Εξασφαλίζει ακεραιότητα χωρίς παραμόρφωση |
| Επεξεργασία τροφίμων | Πίεση/διαμόρφωση προϊόντος | 50-500N | Ομοιόμορφος έλεγχος πυκνότητας |
Πότε είναι η λειτουργία ελέγχου θέσης η καλύτερη επιλογή;
Ο έλεγχος θέσης κυριαρχεί σε εφαρμογές όπου η ακρίβεια της θέσης είναι υψίστης σημασίας. 🎯
Η λειτουργία ελέγχου θέσης είναι απαραίτητη όταν: απαιτείται απόλυτη ακρίβεια θέσης εντός ±0,1 mm, απαιτούνται πολλαπλές θέσεις στάσης κατά μήκος της διαδρομής, η συγχρονισμένη κίνηση με άλλους άξονες είναι κρίσιμη, οι κινήσεις υψηλής ταχύτητας από σημείο σε σημείο απαιτούν βελτιστοποιημένα προφίλ ταχύτητας ή η εφαρμογή περιλαμβάνει συλλογή, τοποθέτηση, ταξινόμηση ή ακριβή μεταφορά υλικών. Οι διαδικασίες κατασκευής που απαιτούν επαναλαμβανόμενες θέσεις ανεξάρτητα από τις διακυμάνσεις του φορτίου επωφελούνται περισσότερο από τον έλεγχο θέσης.
Περιοχές αριστείας στον έλεγχο θέσης
Λειτουργίες συλλογής και τοποθέτησης
Η ρομποτική συναρμολόγηση και η διακίνηση υλικών απαιτούν την επαναλαμβανόμενη μετακίνηση των κυλίνδρων σε ακριβείς θέσεις:
- Πολλαπλές θέσεις στάσης: Ένας κύλινδρος εξυπηρετεί πολλαπλές θέσεις κατά μήκος της διαδρομής του.
- Συγχρονισμένη κίνηση: Συντονίζεται με μεταφορείς, ρομπότ ή άλλους άξονες
- Ακρίβεια υψηλής ταχύτητας: Διατηρεί την ακρίβεια ακόμη και σε ταχύτητες άνω των 2 m/s
Εφαρμογές εντοπισμού θέσης ακριβείας
Φόρτωση εργαλειομηχανής CNC: Τα τεμάχια εργασίας πρέπει να ευθυγραμμίζονται με ακρίβεια 0,05 mm για ακρίβεια κατεργασίας.
Οπτική διάταξη: Η τοποθέτηση του φακού απαιτεί επαναληψιμότητα κάτω του 0,1 mm για την ποιότητα της εστίασης.
Συστήματα επιθεώρησης: Η τοποθέτηση της κάμερας απαιτεί σταθερή θέση για την ανάλυση της εικόνας.
Βελτιστοποίηση προφίλ κίνησης
Ο έλεγχος θέσης επιτρέπει εξελιγμένες στρατηγικές κίνησης:
- Επιτάχυνση S-καμπύλης5: Ομαλή εκκίνηση/διακοπή μειώνει τους μηχανικούς κραδασμούς
- Ανάμειξη ταχύτητας: Μεταβάσεις μεταξύ κινήσεων χωρίς διακοπή
- Ηλεκτρονικό σύστημα μετάδοσης κίνησης: Συγχρονίζεται μαθηματικά με τον κύριο άξονα
- Ιπτάμενη ψαλίδα: Αντιστοιχεί στην ταχύτητα κίνησης του ιστού κατά την κοπή
Πλεονεκτήματα ελέγχου θέσης
- Απόλυτη ακρίβεια: Φτάνει τον στόχο με ακρίβεια μικρομέτρων
- Δυνατότητα πολλαπλών σημείων: Απεριόριστες στάσεις κατά μήκος του διαδρομής
- Προβλέψιμο χρονοδιάγραμμα: Συνέπεια χρόνου κύκλου για τον προγραμματισμό της απόδοσης
- Συγχρονισμός: Συντονίζει πολύπλοκες κινήσεις πολλαπλών αξόνων
Τυπικές προδιαγραφές
Οι σύγχρονοι έξυπνοι κύλινδροι χωρίς ράβδο με έλεγχο θέσης προσφέρουν:
- Ακρίβεια εντοπισμού θέσης: ±0,05 mm έως ±0,5 mm ανάλογα με τον αισθητήρα
- Επαναληψιμότητα: ±0,01 mm για μαγνητοσυσταλτικά συστήματα
- Μέγιστη ταχύτητα: 2-3 m/s με ελεγχόμενη επιβράδυνση
- Ψήφισμα: 0,01 mm ή καλύτερη με κωδικοποιητές υψηλής τεχνολογίας
Οι κύλινδροι χωρίς ράβδο με έλεγχο θέσης Bepto παρέχουν απόδοση ισοδύναμη με αυτή των OEM σε σημαντικά χαμηλότερο κόστος, με πλήρη συμβατότητα για άμεση αντικατάσταση των κύριων εμπορικών σημάτων. Έχουμε βοηθήσει δεκάδες εγκαταστάσεις να αναβαθμίσουν τα παλαιά συστήματά τους, μειώνοντας ταυτόχρονα το κόστος αποθεμάτων ανταλλακτικών κατά 35%. 💰
Μπορείτε να συνδυάσετε και τους δύο τρόπους ελέγχου σε υβριδικές εφαρμογές;
Οι προηγμένες εφαρμογές συχνά απαιτούν εναλλαγή μεταξύ των τρόπων ελέγχου κατά τη διάρκεια διαφορετικών φάσεων του κύκλου. 🔀
Ο υβριδικός έλεγχος δύναμης-θέσης επιτρέπει στους έξυπνους κυλίνδρους να χρησιμοποιούν τον έλεγχο θέσης για γρήγορες κινήσεις προσέγγισης, στη συνέχεια να μεταβαίνουν στον έλεγχο δύναμης για την πραγματική λειτουργία εργασίας και να επιστρέφουν στον έλεγχο θέσης για την ανάκληση. Αυτός ο συνδυασμός προσφέρει βέλτιστο χρόνο κύκλου (γρήγορη τοποθέτηση) με διασφάλιση ποιότητας (ελεγχόμενη εφαρμογή δύναμης). Η εφαρμογή απαιτεί κυλίνδρους με αισθητήρες πίεσης και θέσης, καθώς και ελεγκτές ικανούς να αλλάζουν λειτουργία εντός 10-50 ms.

Υβριδικές στρατηγικές ελέγχου
Διαδοχική εναλλαγή λειτουργιών
Φάση 1 – Ταχεία προσέγγιση (έλεγχος θέσης):
- Μετακινήσου γρήγορα σε θέση σχεδόν επαφής
- Υψηλή ταχύτητα (1,5-2 m/s) για βελτιστοποίηση του χρόνου κύκλου
- Σταματήστε 2-5 mm πριν από την επαφή με το τεμάχιο εργασίας.
Φάση 2 – Λειτουργία εργασίας (έλεγχος δύναμης):
- Μετάβαση σε λειτουργία ελέγχου δύναμης
- Εφαρμόστε ελεγχόμενη δύναμη πίεσης/συναρμολόγησης
- Παρακολούθηση καμπύλης δύναμης-μετατόπισης για την ποιότητα
Φάση 3 – Ανάκληση (έλεγχος θέσης):
- Επιστροφή στην αρχική ή ενδιάμεση θέση
- Βελτιστοποιημένο προφίλ ταχύτητας για τον επόμενο κύκλο
Υβριδική εφαρμογή στον πραγματικό κόσμο
Ένας κατασκευαστής ιατρικών συσκευών στο Μινεάπολη της Μινεσότα χρησιμοποιεί ακριβώς αυτή τη στρατηγική για τη συναρμολόγηση των ακρών καθετήρων. Ο έξυπνος κύλινδρος Bepto τοποθετείται γρήγορα (λειτουργία θέσης) στο σταθμό συναρμολόγησης σε 0,4 δευτερόλεπτα, μεταβαίνει σε λειτουργία δύναμης για να εφαρμόσει με ακρίβεια 18N για τη θερμική στερέωση της άκρης (0,6 δευτερόλεπτα) και στη συνέχεια υποχωρεί υπό έλεγχο θέσης (0,3 δευτερόλεπτα). Συνολικός χρόνος κύκλου: 1,3 δευτερόλεπτα με μηδενικά ελαττώματα σε πάνω από 2 εκατομμύρια κύκλους. 🏥
Απαιτήσεις εφαρμογής
| Στοιχείο | Προδιαγραφές | Σκοπός |
|---|---|---|
| Διπλοί αισθητήρες | Πίεση + Θέση | Ενεργοποίηση και των δύο τρόπων ελέγχου |
| Γρήγορος ελεγκτής | <10ms αλλαγή λειτουργίας | Ομαλή μετάβαση |
| Σερβο/Αναλογική βαλβίδα | Απόκριση υψηλής συχνότητας | Υποστηρίζει και τους δύο τύπους ελέγχου |
| Προηγμένο λογισμικό | Λογική κρατικής μηχανής | Διαχειρίζεται τις μεταβάσεις λειτουργίας |
Οφέλη της υβριδικής προσέγγισης
- Βελτιστοποιημένος χρόνος κύκλου: Γρήγορες κινήσεις όπου η ακρίβεια δεν είναι κρίσιμη
- Διασφάλιση ποιότητας: Ελεγχόμενη δύναμη όπου χρειάζεται
- Παρακολούθηση της διαδικασίας: Καταγραφή δεδομένων θέσης και δύναμης
- Ευελιξία: Προσαρμογή στις παραλλαγές του προϊόντος αυτόματα
Πλαίσιο απόφασης
Χρησιμοποιήστε τον έλεγχο δύναμης όταν:
- Το πάχος/ύψος του εξαρτήματος ποικίλλει >0,5 mm
- Οι ιδιότητες των υλικών είναι ασυνεπείς
- Είναι πιθανή η πρόκληση ζημιάς από υπερβολική δύναμη.
- Η ποιότητα της διαδικασίας εξαρτάται από την εφαρμογή δύναμης
Χρησιμοποιήστε τον έλεγχο θέσης όταν:
- Η απόλυτη ακρίβεια της θέσης είναι κρίσιμη
- Απαιτούνται πολλαπλές θέσεις στάσης
- Απαιτείται συγχρονισμός με άλλο εξοπλισμό
- Η βελτιστοποίηση του χρόνου κύκλου απαιτεί υψηλή ταχύτητα
Χρησιμοποιήστε τον υβριδικό έλεγχο όταν:
- Η εφαρμογή έχει ξεχωριστές φάσεις τοποθέτησης και λειτουργίας
- Τόσο η ταχύτητα όσο και η ποιότητα είναι κρίσιμης σημασίας
- Η παρακολούθηση της διαδικασίας απαιτεί δεδομένα τόσο για τη δύναμη όσο και για τη θέση.
- Ο προϋπολογισμός επιτρέπει την εγκατάσταση προηγμένων συστημάτων έξυπνων κυλίνδρων
Συμπέρασμα
Η επιλογή μεταξύ των τρόπων ελέγχου δύναμης και ελέγχου θέσης — ή η εφαρμογή υβριδικών στρατηγικών — επηρεάζει άμεσα την ποιότητα του προϊόντος, την αποδοτικότητα του κύκλου και την ικανότητα της διαδικασίας, καθιστώντας αυτή τη θεμελιώδη απόφαση μία από τις πιο σημαντικές στον σχεδιασμό πνευματικών συστημάτων για τη σύγχρονη κατασκευή. 🚀
Συχνές ερωτήσεις σχετικά με τις λειτουργίες ελέγχου του Smart Cylinder
Ε: Μπορώ να αναβαθμίσω τους υπάρχοντες κυλίνδρους μου για να προσθέσω έλεγχο δύναμης ή θέσης;
Η αναβάθμιση εξαρτάται από τον τρέχοντα σχεδιασμό του κυλίνδρου σας. Οι τυπικοί κύλινδροι μπορούν να αναβαθμιστούν με εξωτερικούς αισθητήρες θέσης (μαγνητικές ταινίες, κωδικοποιητές σύρματος έλξης) για έλεγχο θέσης, αλλά ο έλεγχος δύναμης απαιτεί μετατροπείς πίεσης στις θύρες του κυλίνδρου καθώς και έλεγχο αναλογικής βαλβίδας. Το συνολικό κόστος αναβάθμισης κυμαίνεται συνήθως στο 60-80% της τιμής ενός νέου έξυπνου κυλίνδρου, οπότε η αντικατάσταση είναι συχνά πιο οικονομική. Η Bepto προσφέρει οικονομικά αποδοτικές αντικαταστάσεις έξυπνων κυλίνδρων χωρίς ράβδο, συμβατές με τις κύριες διεπαφές στήριξης OEM.
Ε: Πόσο εξαρτάται η ακρίβεια του ελέγχου της δύναμης από τη σταθερότητα της πίεσης του αέρα;
Η ακρίβεια του ελέγχου δύναμης είναι άμεσα ανάλογη με τη σταθερότητα της πίεσης τροφοδοσίας, καθώς F = P × A. Μια διακύμανση πίεσης ±0,2 bar σε τροφοδοσία 6 bar προκαλεί διακύμανση δύναμης ±3,3%. Για κρίσιμες εφαρμογές που απαιτούν ακρίβεια δύναμης ±1%, χρησιμοποιήστε ρυθμιστές πίεσης με σταθερότητα ±0,05 bar και εξετάστε το ενδεχόμενο ελέγχου πίεσης κλειστού βρόχου. Ο έλεγχος θέσης είναι λιγότερο ευαίσθητος στις διακυμάνσεις πίεσης, καθώς ρυθμίζει τη θέση της βαλβίδας για να επιτύχει τη θέση-στόχο ανεξάρτητα από την πίεση.
Ε: Πόσος χρόνος απόκρισης μπορώ να περιμένω κατά την εναλλαγή μεταξύ των τρόπων ελέγχου;
Οι σύγχρονοι έξυπνοι ελεγκτές κυλίνδρων αλλάζουν λειτουργία σε 10-50 ms, ανάλογα με την αρχιτεκτονική του συστήματος. Η πραγματική φυσική απόκριση (αλλαγή κίνησης του κυλίνδρου) διαρκεί επιπλέον 20-100 ms, ανάλογα με τον χρόνο απόκρισης της βαλβίδας και τη δυναμική του πνευματικού συστήματος. Για εφαρμογές που απαιτούν συχνή αλλαγή λειτουργίας (>5 φορές ανά δευτερόλεπτο), βεβαιωθείτε ότι ο ελεγκτής και οι βαλβίδες σας είναι κατάλληλοι για λειτουργία υψηλής συχνότητας, ώστε να αποφύγετε την υποβάθμιση της απόδοσης.
Ε: Οι κύλινδροι με έλεγχο δύναμης καταναλώνουν περισσότερο αέρα από τους κυλίνδρους με έλεγχο θέσης;
Ο έλεγχος δύναμης καταναλώνει συνήθως 10-20% περισσότερο αέρα, επειδή ρυθμίζει συνεχώς την πίεση για να διατηρήσει τη δύναμη-στόχο, ενώ ο έλεγχος θέσης χρησιμοποιεί πλήρη πίεση για τις κινήσεις και στη συνέχεια διατηρεί τη θέση με ελάχιστη ροή. Ωστόσο, ο έλεγχος δύναμης αποτρέπει τη σπατάλη ενέργειας από την υπερβολική πίεση, η οποία μπορεί να αντισταθμίσει αυτή τη διαφορά. Η πραγματική κατανάλωση εξαρτάται σε μεγάλο βαθμό από τον κύκλο λειτουργίας της εφαρμογής. Συμβουλευτείτε την ομάδα μηχανικών της Bepto για συγκεκριμένους υπολογισμούς με βάση τις παραμέτρους της διαδικασίας σας.
Ε: Μπορεί ένας έξυπνος κύλινδρος να χειριστεί τόσο τον έλεγχο της εφελκυστικής (έλξη) όσο και της συμπιεστικής (ώθηση) δύναμης;
Ναι, οι προηγμένοι έξυπνοι κύλινδροι με αισθητήρες πίεσης και στους δύο θαλάμους μπορούν να ελέγχουν τη δύναμη και στις δύο κατευθύνσεις. Αυτό απαιτεί διπλούς μετατροπείς πίεσης και υπολογισμό αμφίδρομης δύναμης (F = P₁×A₁ – P₂×A₂ λαμβάνοντας υπόψη τις διαφορές στην επιφάνεια της ράβδου). Εφαρμογές όπως η δοκιμή υλικών, ο έλεγχος της τάσης του ιστού και η αμφίδρομη συναρμολόγηση επωφελούνται από αυτή τη δυνατότητα. Οι τυπικές εφαρμογές ελέγχουν συνήθως τη δύναμη μόνο σε μία κατεύθυνση (συνήθως ώθηση) για να μειώσουν το κόστος και την πολυπλοκότητα.
-
Ένας οδηγός που εξηγεί πώς οι γραμμικοί κωδικοποιητές μετατρέπουν τη μηχανική κίνηση σε ηλεκτρικά σήματα για ακριβή τοποθέτηση. ↩
-
Μια επισκόπηση του τρόπου με τον οποίο οι αναλογικές και οι σερβοβαλβίδες ρυθμίζουν τη ροή και την πίεση στα υδραυλικά συστήματα. ↩
-
Ένας τεχνικός πόρος για την ερμηνεία καμπυλών δύναμης-μετατόπισης για την ανάλυση των ιδιοτήτων των υλικών και της μηχανικής συμπεριφοράς τους. ↩
-
Ένας τεχνικός οδηγός για την ανάλυση συσσώρευσης ανοχών και την επίδρασή της στην προσαρμογή και τη λειτουργία των συγκροτημάτων. ↩
-
Σύγκριση προφίλ κίνησης που εξηγεί πώς η επιτάχυνση της καμπύλης S μειώνει τους μηχανικούς κραδασμούς και τις απότομες κινήσεις. ↩
