

Histéresis1 Es el asesino invisible de la precisión que acecha en todos los sistemas de actuadores proporcionales, destruyendo silenciosamente la precisión de posicionamiento hasta en 15%, mientras los ingenieros culpan a todo menos al verdadero culpable. Este fenómeno hace que los actuadores “recuerden” sus posiciones anteriores, creando zonas muertas impredecibles que convierten el control suave en una frustrante inconsistencia. 😠
La histéresis en el control del actuador proporcional crea errores de posicionamiento de 2-15% de carrera completa debido al juego mecánico, la fricción de las juntas, los efectos magnéticos y las bandas muertas de la válvula de control, lo que requiere una compensación mediante algoritmos de software, precarga mecánica, retroalimentación de mayor resolución y una selección adecuada de los componentes para lograr una precisión de posicionamiento inferior a 1%.
Hace dos meses, trabajé con Jennifer, ingeniera de controles en una planta de fabricación aeroespacial en Seattle, cuyos robots de montaje de precisión fallaban los objetivos por 3 mm de forma sistemática, no aleatoria, sino siguiendo un patrón predecible que indicaba claramente la presencia de histéresis. Tras implementar nuestras soluciones antihistéresis Bepto, sus errores de posicionamiento se redujeron a menos de 0,5 mm. ✈️
Índice
- ¿Qué es exactamente la histéresis y por qué se produce en los actuadores proporcionales?
- ¿Cómo afecta la histéresis a los diferentes tipos de sistemas de control proporcional?
- ¿Qué técnicas de medición identifican y cuantifican mejor los efectos de histéresis?
- ¿Cuáles son los métodos más eficaces para minimizar la histéresis en su sistema?
¿Qué es exactamente la histéresis y por qué se produce en los actuadores proporcionales?
Comprender los mecanismos de histéresis es esencial para lograr un control proporcional preciso en los sistemas de actuadores neumáticos e hidráulicos.
La histéresis se produce cuando la posición de salida del actuador depende tanto de la orden de entrada actual como del historial de posiciones anteriores, lo que crea diferentes trayectorias de respuesta para las órdenes de aumento y disminución debido al juego mecánico, las fuerzas de fricción, los efectos magnéticos y las bandas muertas de la válvula de control que se acumulan a lo largo del bucle de control.
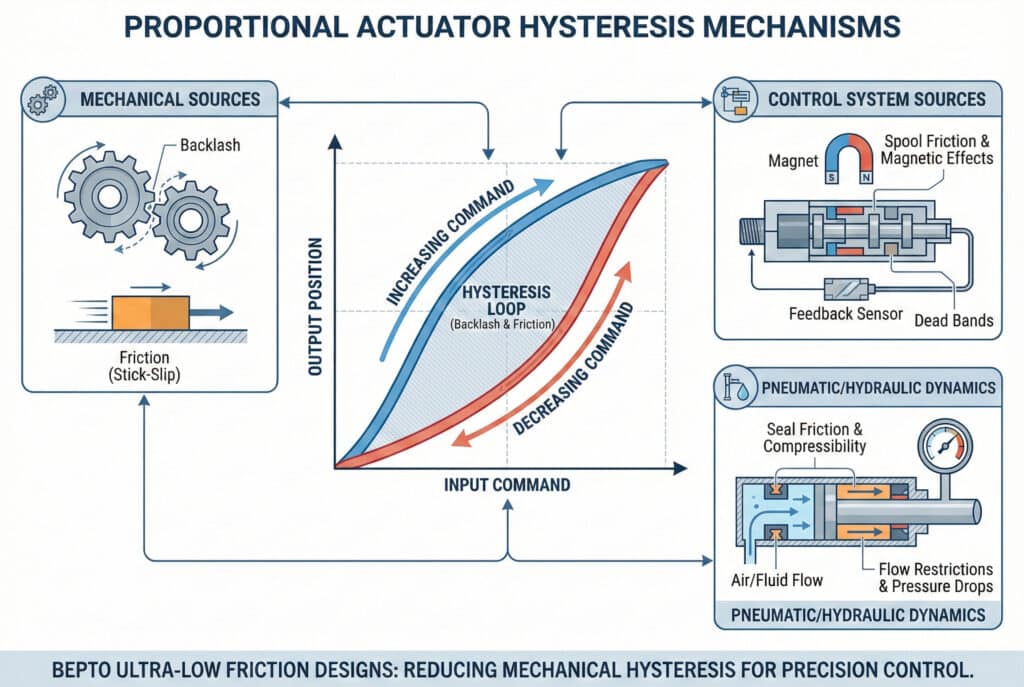
Mecanismos fundamentales de histéresis
Fuentes mecánicas
Los componentes físicos contribuyen significativamente a la histéresis del sistema:
- Contragolpe2: Los trenes de engranajes, los acoplamientos y las conexiones crean zonas muertas.
- Fricción: Las diferencias entre la fricción estática y la cinética provocan un comportamiento de adherencia-deslizamiento.
- Cumplimiento: Deformación elástica en articulaciones mecánicas
- Patrones de desgaste: El desgaste de los componentes crea superficies de contacto irregulares.
Fuentes del sistema de control
Los elementos de control electrónicos y neumáticos añaden histéresis:
| Tipo de componente | Histeresis típica | Causa principal | Estrategia de mitigación |
|---|---|---|---|
| Servoválvulas | 0.1-0.5% | Fricción del carrete | Dither de alta frecuencia |
| Válvulas proporcionales3 | 0.5-2% | Histéresis magnética | Compensación de retroalimentación |
| Sensores de posición | 0.05-0.2% | Ruido electrónico | Filtrado de señales |
| Amplificadores | 0.1-0.3% | Ajustes de banda muerta | Ajuste de calibración |
Orígenes físicos en los sistemas neumáticos
Efectos de la fricción de los sellos
Los sellos neumáticos crean fuentes significativas de histéresis:
- Fricción de separación: Se necesita una mayor fuerza para iniciar el movimiento.
- Fricción por deslizamiento: Menor fuerza durante el movimiento continuo
- comportamiento stick-slip4: Movimiento irregular a bajas velocidades
- Dependencia de la temperatura: La fricción cambia con la temperatura de funcionamiento.
Dinámica de la presión
Los efectos de la presión del sistema neumático contribuyen a la histéresis:
- Compresibilidad: La compresión del aire crea un comportamiento similar al de un resorte.
- Restricciones de caudal: Las restricciones en válvulas y accesorios provocan retrasos.
- Caídas de presión: Las pérdidas de línea crean fuerzas dependientes de la posición.
- Efectos de la temperatura: La expansión térmica afecta a la rigidez del sistema.
En Bepto, hemos diseñado nuestros cilindros sin vástago con juntas de fricción ultrabaja y sistemas de guía mecanizados con precisión que reducen la histéresis mecánica en un 60% en comparación con los diseños estándar, lo cual es fundamental para aplicaciones de control proporcional de alta precisión. 🎯
Histéresis dependiente de la carga
Efectos de carga variable
Las cargas externas influyen significativamente en las características de histéresis:
- Cargas gravitacionales: Variaciones de fuerza dependientes de la posición
- Cargas inerciales: Requisitos de fuerza dependientes de la aceleración
- Cargas de proceso: Fuerzas externas variables durante el funcionamiento
- Cargas por fricción: Variaciones de la fuerza de contacto superficial
Interacciones de carga dinámica
Las cargas en movimiento crean patrones de histéresis complejos:
- Efectos de aceleración: Fuerzas inerciales durante los cambios de velocidad
- Acoplamiento por vibración: Las vibraciones externas afectan al posicionamiento.
- Interacciones de resonancia: Excitación por frecuencia natural
- Variaciones de amortiguación: Características de amortiguación dependientes de la carga
¿Cómo afecta la histéresis a los diferentes tipos de sistemas de control proporcional?
Los efectos de histéresis varían significativamente entre las diferentes tecnologías de actuadores y arquitecturas de control, lo que requiere estrategias de compensación personalizadas.
Los sistemas proporcionales de bucle abierto experimentan errores de histéresis de 5-15% sin capacidad de corrección, mientras que los sistemas de bucle cerrado pueden reducir la histéresis a 0,5-2% mediante la compensación de retroalimentación, y los sistemas servo avanzados alcanzan una precisión inferior a 0,1% utilizando codificadores de alta resolución y sofisticados algoritmos de control.
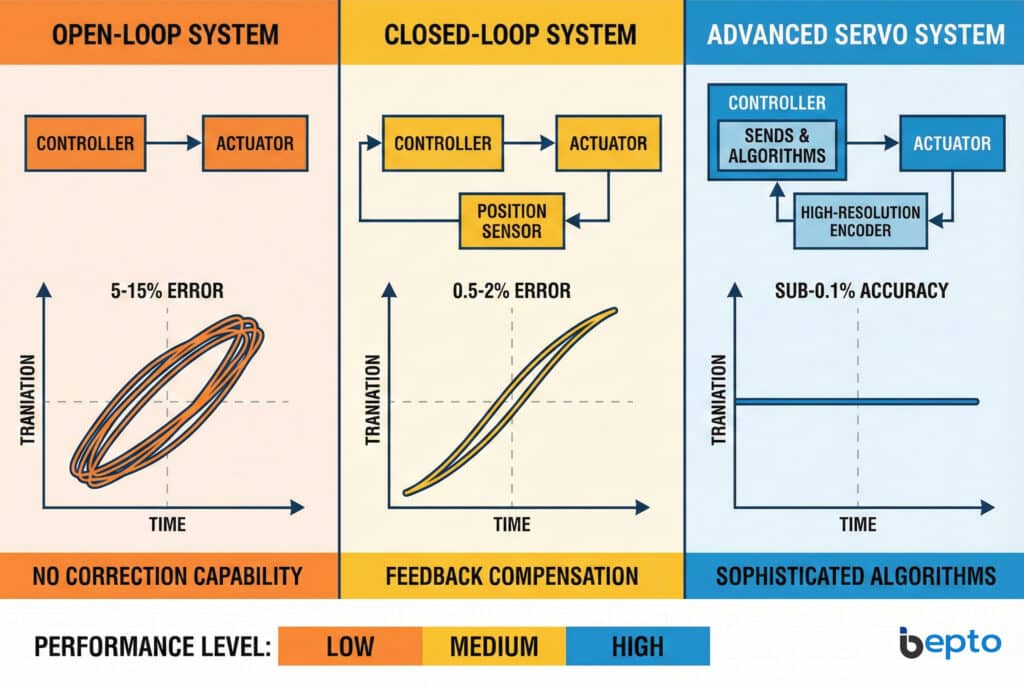
Sistemas de control de bucle abierto
Limitaciones inherentes
Los sistemas de bucle abierto no pueden compensar los efectos de histéresis:
- Sin corrección de retroalimentación: Los errores se acumulan sin ser detectados.
- Patrones predecibles: La histéresis crea errores de posicionamiento repetibles.
- Sensibilidad a la temperatura: El rendimiento varía según las condiciones de funcionamiento.
- Dependencia de la carga: Las diferentes cargas crean diferentes patrones de histéresis.
Características típicas de rendimiento
El rendimiento de la histéresis del sistema de bucle abierto varía según la aplicación:
| Tipo de aplicación | Rango de histéresis | Usos aceptables | Limitaciones de rendimiento |
|---|---|---|---|
| Posicionamiento sencillo | 5-15% | Tareas no críticas | Repetibilidad deficiente |
| Control de velocidad | 3-8% | Regulación aproximada de la velocidad | Rendimiento variable |
| Control de la fuerza | 10-25% | Aplicaciones básicas de la fuerza | Resultados inconsistentes |
| Sistemas multieje | 8-20% | Automatización sencilla | Errores acumulativos |
Sistemas de control de bucle cerrado
Beneficios de compensación por comentarios
Los sistemas de bucle cerrado pueden compensar activamente la histéresis:
- Detección de errores: Monitorización continua de la posición
- Corrección en tiempo real: Respuesta inmediata a los errores de posicionamiento
- Control adaptativo: Los algoritmos de aprendizaje mejoran el rendimiento.
- Rechazo de perturbaciones: Compensación de fuerzas externas
Eficacia del algoritmo de control
Las diferentes estrategias de control gestionan la histéresis con distintos grados de éxito:
- Control PID5: Compensación básica, histéresis residual 2-5%
- Control de avance: Compensación predictiva, residual 1-3%
- Control adaptativo: Compensación de aprendizaje, 0,5-2% residual
- Control basado en modelos: Compensación teórica, 0,1-11 TP3T residual
Sistemas de control servo
Técnicas avanzadas de compensación
Los sistemas servo de alto rendimiento emplean una sofisticada compensación de histéresis:
- Mapeo de histéresis: Caracterización del sistema y tablas de compensación
- Técnicas de precarga: Sesgo mecánico para eliminar zonas muertas
- Señales de difuminado: Excitación de alta frecuencia para superar la fricción.
- Algoritmos predictivos: Predicción de histéresis basada en modelos
Michael, ingeniero robótico en una planta de fabricación de precisión en Carolina del Norte, implementó las actualizaciones de control servo que le recomendamos en su línea de montaje. La precisión de posicionamiento mejoró de ±2,5 mm a ±0,3 mm, lo que redujo los defectos del producto en un 75% y ahorró $50 000 al mes en costes de reelaboración. 🤖
Desafíos del sistema multieje
Efectos acumulativos
Los actuadores múltiples agravan los problemas de histéresis:
- Acumulación de errores: Los errores de los ejes individuales se combinan
- Efectos de acoplamiento: Las interacciones entre ejes crean patrones complejos.
- Problemas de sincronización: Los diferentes patrones de histéresis causan problemas de coordinación.
- Complejidad de la calibración: Los sistemas múltiples requieren un ajuste individual.
Estrategias de coordinación
Los sistemas multieje avanzados utilizan técnicas especializadas:
- Control maestro-esclavo: Un eje lidera, los demás siguen.
- Compensación de acoplamiento cruzado: Corrección de la interacción entre ejes
- Posicionamiento sincronizado: Perfiles de movimiento coordinados
- Optimización global: Optimización del rendimiento en todo el sistema
¿Qué técnicas de medición identifican y cuantifican mejor los efectos de histéresis?
La medición y caracterización precisas de la histéresis permiten desarrollar estrategias de compensación eficaces y optimizar el sistema.
La medición de la histéresis requiere pruebas de posicionamiento bidireccionales con codificadores de alta resolución, el registro de las relaciones entre la posición y el comando a lo largo de ciclos completos, el análisis de la amplitud del bucle y los patrones de asimetría, y la documentación de las dependencias de temperatura y carga para crear mapas de compensación completos que permitan un rendimiento de control óptimo.
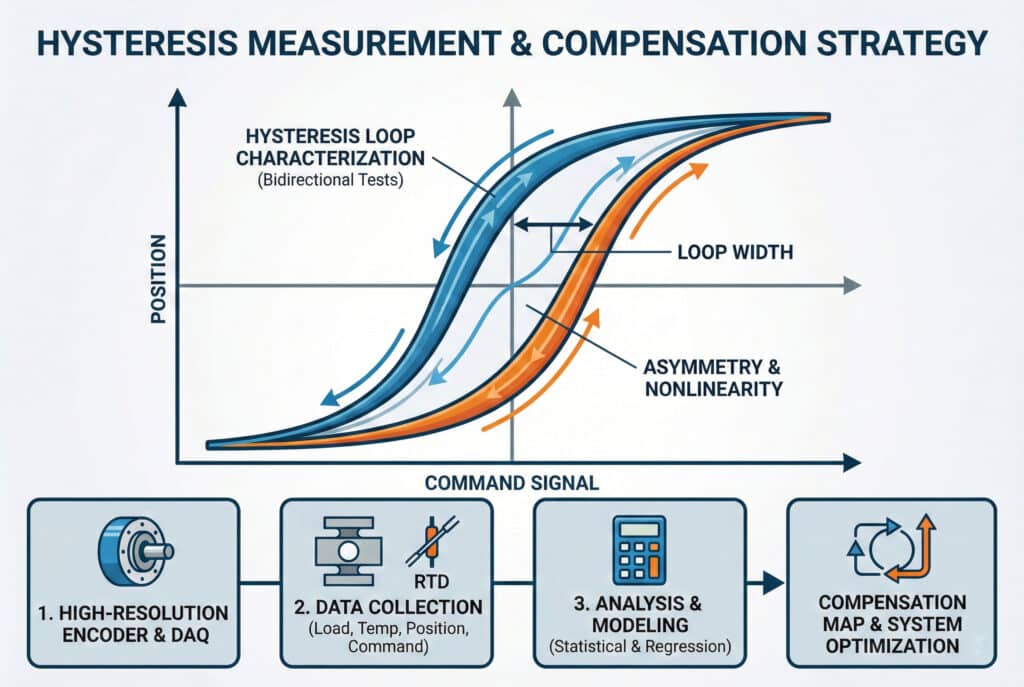
Protocolos de medición estándar
Pruebas de posicionamiento bidireccionales
La caracterización exhaustiva de la histéresis requiere pruebas sistemáticas:
- Ciclos completos: Secuencias completas de extensión y retracción
- Múltiples velocidades: Varios perfiles de velocidad para identificar dependencias de velocidad.
- Variaciones de carga: Diferentes cargas externas para mapear los efectos de la carga
- Rangos de temperatura: Evaluación del impacto de la temperatura de funcionamiento
Requisitos para la recopilación de datos
La medición precisa de la histéresis exige instrumentos de alta calidad:
| Parámetro de medición | Resolución requerida | Equipamiento típico | Objetivo de precisión |
|---|---|---|---|
| Comentarios sobre la posición | 0,011 TP3T de accidente cerebrovascular | Codificador lineal | ±0,0051 TP3T |
| Señal de comando | 12 bits mínimo | Sistema DAQ | ±0,1% |
| Medición de carga | 1% de fuerza nominal | Célula de carga | ±0,5% |
| Temperatura | ±1°C | Sensor RTD | ±0.5°C |
Técnicas de análisis
Caracterización del bucle de histéresis
El análisis matemático revela características de histéresis:
- Ancho del bucle: Diferencia máxima de posición con el mismo comando
- Asimetría: Sesgo direccional en los errores de posicionamiento
- No linealidad: Desviación de la respuesta lineal ideal
- Repetibilidad: Consistencia a lo largo de múltiples ciclos
Métodos de análisis estadístico
Las técnicas avanzadas de análisis cuantifican los efectos de histéresis:
- Desviación estándar: Medición de la repetibilidad del posicionamiento
- Análisis de correlación: Fortaleza de la relación entre insumos y productos
- Análisis de frecuencias: Características de respuesta dinámica
- Análisis de regresión: Desarrollo de modelos matemáticos
Sistemas de vigilancia en tiempo real
Seguimiento continuo de histéresis
Los sistemas de producción se benefician de la supervisión continua de la histéresis:
- Sensores integrados: Sistemas integrados de retroalimentación de posición
- Registro de datos: Registro continuo del rendimiento
- Análisis de tendencias: Seguimiento de la degradación del rendimiento a largo plazo
- Mantenimiento predictivo: Alerta temprana del desgaste de los componentes
Nuestros sistemas de diagnóstico Bepto incluyen supervisión de histéresis en tiempo real que avisa a los operadores cuando los errores de posicionamiento superan los umbrales de 0,5%, lo que permite realizar un mantenimiento proactivo antes de que la precisión se deteriore hasta niveles inaceptables. 📊
Evaluación del impacto ambiental
Efectos de la temperatura
La temperatura influye significativamente en las características de histéresis:
- Expansión térmica: Cambios en las dimensiones mecánicas
- Cambios en la viscosidad: Variaciones en las propiedades de los fluidos
- Propiedades del material: Dependencia de la temperatura del módulo de elasticidad
- Rendimiento de la junta: Variaciones del coeficiente de fricción
Análisis de dependencia de la carga
Las cargas externas crean patrones de histéresis complejos:
- Cargas estáticas: Efectos de la fuerza constante sobre el posicionamiento
- Cargas dinámicas: Impacto de fuerza variable durante el movimiento
- Efectos inerciales: Errores de posicionamiento dependientes de la aceleración
- Variaciones de fricción: El impacto de las condiciones de la superficie en el rendimiento
¿Cuáles son los métodos más eficaces para minimizar la histéresis en su sistema?
La implementación de estrategias integrales de reducción de histéresis permite alcanzar una precisión de posicionamiento inferior a 11 TP3T en aplicaciones exigentes de control proporcional.
La minimización eficaz de la histéresis combina mejoras mecánicas, como componentes de baja fricción y eliminación del juego, mejoras en el sistema de control con compensación anticipada y algoritmos adaptativos, además de controles ambientales para la estabilidad de la temperatura y la carga, lo que suele reducir la histéresis de 5-15% a menos de 1% de escala completa.
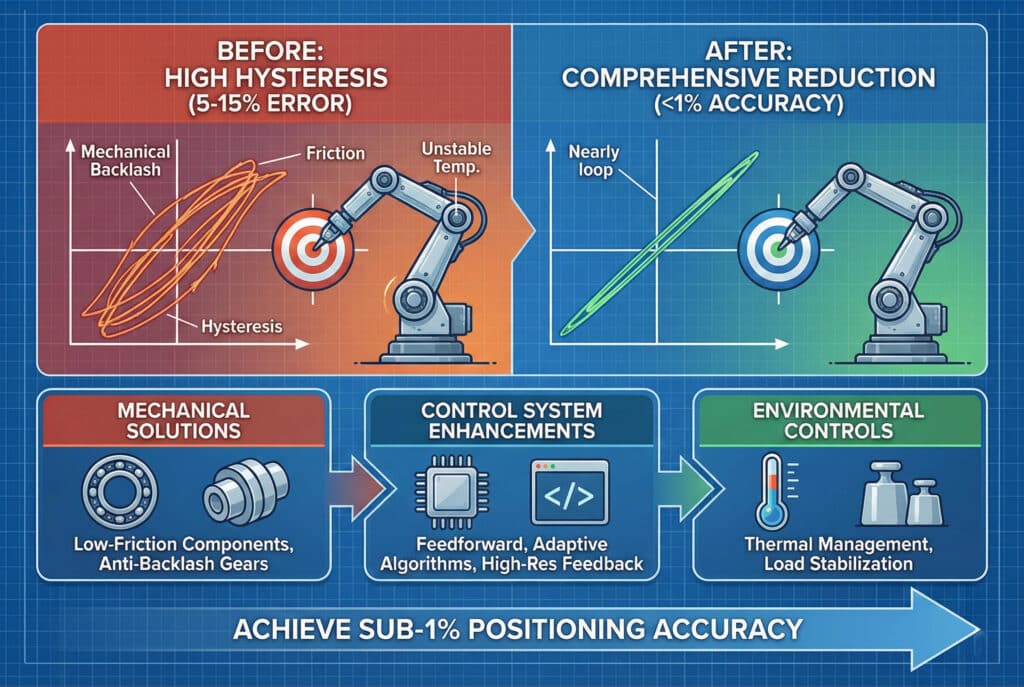
Soluciones mecánicas
Selección y diseño de componentes
Elija componentes diseñados específicamente para baja histéresis:
- Rodamientos de precisión: Guías lineales de alta calidad con un juego mínimo.
- Juntas de baja fricción: Materiales y diseños avanzados para juntas
- Acoplamientos rígidos: Elimine las fuentes de holgura mecánica.
- Sistemas precargados: Sesgo mecánico para eliminar zonas muertas
Mejoras en la arquitectura del sistema
Diseñar sistemas mecánicos para minimizar las fuentes de histéresis:
| Característica de diseño | Reducción de la histéresis | Coste de aplicación | Impacto del mantenimiento |
|---|---|---|---|
| Accionamiento directo | 80-90% | Alta | Bajo |
| Guías precargadas | 60-70% | Medio | Medio |
| Acoplamientos de precisión | 40-50% | Bajo | Bajo |
| Engranajes antirretroceso | 70-80% | Medio | Alta |
Mejoras del sistema de control
Técnicas de compensación de software
Los algoritmos de control avanzados pueden reducir significativamente los efectos de histéresis:
- Mapeo de histéresis: Tablas de consulta para la corrección de la posición
- Control de avance: Compensación predictiva basada en la dirección del comando
- Algoritmos adaptativos: Compensación de histéresis con autoaprendizaje
- Control basado en modelos: Predicción de histéresis basada en la física
Mejoras en el sistema de comentarios
Los sistemas de retroalimentación mejorados permiten una mejor compensación de la histéresis:
- Codificadores de mayor resolución: Mayor precisión en la medición de la posición
- Sensores de retroalimentación múltiples: Medición redundante de la posición
- Retroalimentación de velocidad: Algoritmos de compensación basados en tasas
- Retroalimentación de fuerza: Compensación de histéresis dependiente de la carga
Estrategias de control medioambiental
Gestión de la temperatura
Las temperaturas de funcionamiento estables reducen las variaciones de histéresis:
- Aislamiento térmico: Proteja los actuadores de los cambios bruscos de temperatura.
- Refrigeración activa: Mantenga temperaturas de funcionamiento constantes.
- Compensación de temperatura: Corrección por software de los efectos térmicos
- Preacondicionamiento térmico: Permitir que los sistemas alcancen el equilibrio térmico.
Estabilización de la carga
Las condiciones de carga constantes minimizan las variaciones de histéresis:
- Aislamiento de carga: Desacoplar las perturbaciones externas
- Contrapeso: Reducir los efectos de la carga gravitacional.
- Amortiguación de vibraciones: Minimizar las variaciones dinámicas de carga.
- Optimización de procesos: Reducir las fuerzas externas variables
Sarah, ingeniera de procesos en una planta de envasado farmacéutico de Colorado, implementó nuestro programa integral de reducción de histéresis. La precisión en el recuento de comprimidos mejoró de 98,51 TP3T a 99,81 TP3T, cumpliendo los requisitos de la FDA y reduciendo los residuos en 1 TP4T 25 000 al mes. 💊
Técnicas avanzadas de compensación
Aplicación de la señal de difuminado
La excitación de alta frecuencia puede superar la histéresis basada en la fricción:
- Selección de frecuencia: Elija frecuencias por encima del ancho de banda del sistema.
- Optimización de la amplitud: Equilibrar la eficacia con la estabilidad del sistema.
- Diseño de forma de onda: Señales sinusoidales, triangulares o aleatorias
- Métodos de implementación: Generación de hardware o software
Métodos de control predictivo
Los enfoques basados en modelos proporcionan una compensación de histéresis superior:
- Identificación del sistema: Desarrollo de modelos matemáticos
- Filtro de Kalman: Estimación óptima del estado
- Control predictivo de modelos: Optimización del estado futuro
- Modelado adaptativo: Actualizaciones de parámetros del modelo en tiempo real
Mantenimiento y calibración
Procedimientos de calibración periódicos
La calibración sistemática mantiene un rendimiento de baja histéresis:
- Mapeo periódico de histéresis: Documentar los cambios de rendimiento
- Inspección de componentes: Identificar el deterioro relacionado con el desgaste.
- Mantenimiento de la lubricación: Mantener niveles óptimos de fricción.
- Verificación de la alineación: Garantizar la precisión mecánica
Estrategias de mantenimiento predictivo
El mantenimiento proactivo evita la degradación por histéresis:
- Tendencia del rendimiento: Seguimiento de los cambios de histéresis a lo largo del tiempo
- Seguimiento de la vida útil de los componentes: Sustituya los componentes antes de que fallen
- Monitorización del estado: Evaluación continua del estado del sistema
- Sustitución preventiva: Programar el mantenimiento en función del uso.
En Bepto, nuestros paquetes de reducción de histéresis suelen lograr una mejora de entre 70 y 851 TP3T en la precisión de posicionamiento, y muchos clientes informan de niveles de histéresis inferiores a 0,51 TP3T en sus aplicaciones más exigentes, un rendimiento que se traduce directamente en una mayor calidad del producto y una reducción de los residuos. 🎯
Conclusión
Comprender y controlar la histéresis es esencial para lograr un control preciso y proporcional del actuador, lo que requiere mediciones sistemáticas, compensaciones específicas y un mantenimiento continuo para obtener un rendimiento óptimo.
Preguntas frecuentes sobre la histéresis en el control de actuadores proporcionales
P: ¿Qué se considera una histéresis aceptable en los sistemas de actuadores proporcionales?
La histéresis aceptable depende de los requisitos de la aplicación: la automatización general tolera entre 2 y 51 TP3T, el montaje de precisión necesita menos de 11 TP3T y las aplicaciones de ultraprecisión requieren niveles de histéresis inferiores a 0,51 TP3T. Nuestros sistemas Bepto suelen alcanzar una histéresis de entre 0,3 y 0,81 TP3T con una implementación adecuada.
P: ¿Puede la compensación por software eliminar por completo la histéresis mecánica?
La compensación por software puede reducir la histéresis entre un 60 % y un 80 % (TP3T), pero no puede eliminar por completo las fuentes mecánicas, como el juego y la fricción. La combinación de mejoras mecánicas con la compensación por software permite obtener los mejores resultados, normalmente con una histéresis total del sistema inferior a 11 TP3T.
P: ¿Con qué frecuencia debo recalibrar mi sistema de control proporcional para la histéresis?
La frecuencia de calibración depende de la intensidad de uso y los requisitos de precisión: los sistemas de alta precisión necesitan una calibración mensual, las aplicaciones generales requieren comprobaciones trimestrales y los sistemas de baja precisión pueden utilizar programas de calibración anuales con supervisión continua del rendimiento.
P: ¿Cuál es la diferencia entre histéresis y holgura en los sistemas de actuadores?
El juego mecánico es el juego mecánico en las conexiones y engranajes, mientras que la histéresis incluye todos los efectos dependientes de la posición, incluyendo la fricción, los efectos magnéticos y las bandas muertas del sistema de control. El juego mecánico es un componente de la histéresis total del sistema.
P: ¿Cómo puedo saber si la histéresis es la causa de mis problemas de posicionamiento?
La histéresis crea patrones característicos: errores de posicionamiento constantes que dependen de la dirección de aproximación, diferente precisión al moverse hacia arriba y hacia abajo, y patrones de error repetibles. Las pruebas de posicionamiento bidireccionales revelan bucles de histéresis que confirman el diagnóstico.
-
Conozca los principios físicos de la histéresis y su impacto en la precisión en diferentes disciplinas de la ingeniería. ↩
-
Comprender las causas y las soluciones de ingeniería para eliminar el juego en los enlaces mecánicos. ↩
-
Explora la mecánica interna y los principios operativos de las válvulas de control neumáticas proporcionales. ↩
-
Descubra la mecánica que hay detrás del fenómeno del deslizamiento intermitente y cómo afecta al movimiento de los actuadores a baja velocidad. ↩
-
Adquiera un conocimiento más profundo de la teoría del control PID y su aplicación en la automatización industrial. ↩
