

Pendahuluan
Apakah Anda kesulitan memilih strategi kontrol yang tepat untuk aplikasi silinder pneumatik cerdas Anda? 🤔 Banyak insinyur mengalami kebingungan saat memilih antara mode kontrol gaya dan mode kontrol posisi, yang dapat menyebabkan kinerja yang kurang optimal, kerusakan produk, atau proses yang tidak efisien. Pilihan yang salah dapat berarti perbedaan antara operasi yang lancar dan kegagalan yang mahal.
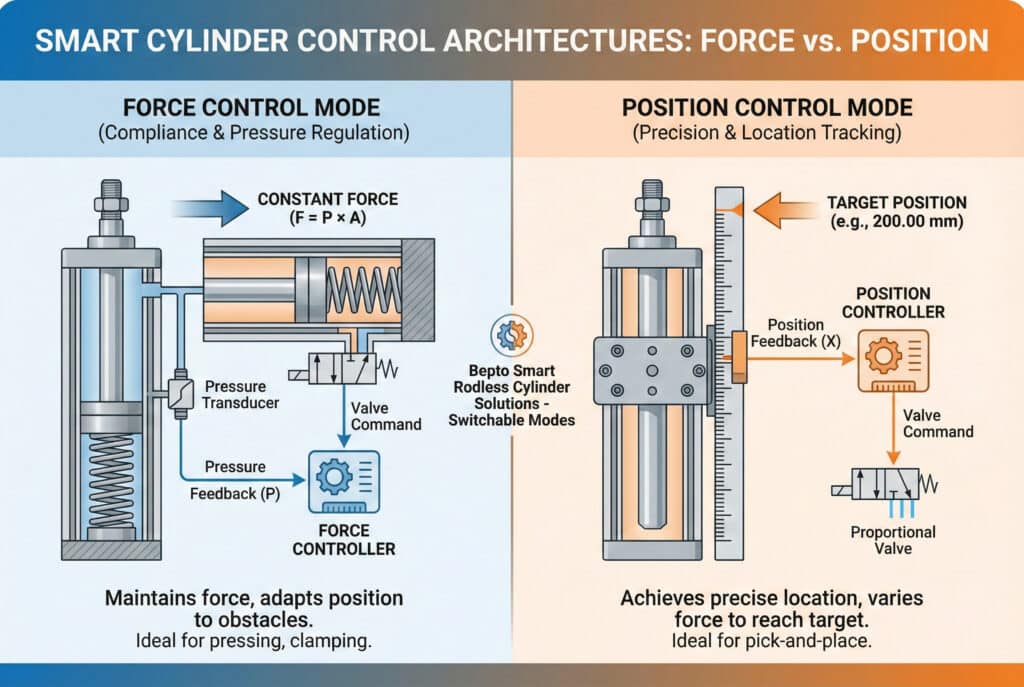
Mode kontrol gaya mengatur tekanan atau output gaya silinder pintar untuk menjaga gaya dorong/tarik yang konsisten terlepas dari posisi, ideal untuk operasi penekanan, penjepitan, dan perakitan. Mode kontrol posisi berfokus pada pencapaian dan pemeliharaan lokasi kereta yang presisi sepanjang stroke, sempurna untuk tugas-tugas pick-and-place, penyortiran, dan penempatan. Pilihan tergantung pada apakah aplikasi Anda memprioritaskan “seberapa kuat” (gaya) atau “di mana tepatnya” (posisi) silinder beroperasi.
Bulan lalu, saya berkonsultasi dengan Rachel, seorang insinyur proses di pabrik perakitan mobil di Cleveland, Ohio. Timnya menggunakan kontrol posisi untuk proses pemasangan panel pintu, tetapi panel-panel tersebut retak akibat penerapan kekuatan yang tidak konsisten. Setelah kami mengganti silinder pintar tanpa batang Bepto miliknya ke mode kontrol kekuatan dengan umpan balik tekanan, tingkat cacat turun dari 8% menjadi kurang dari 0,5%. Memahami kapan harus menggunakan masing-masing mode sangat penting untuk kesuksesan aplikasi. 💡
Daftar Isi
- Apa Perbedaan Dasar Antara Pengendalian Gaya dan Pengendalian Posisi?
- Kapan Anda Harus Menggunakan Mode Kontrol Tenaga dalam Aplikasi Pneumatik?
- Kapan Mode Kontrol Posisi Lebih Baik Dipilih?
- Apakah Anda dapat menggabungkan kedua mode kontrol dalam aplikasi hibrida?
Apa Perbedaan Dasar Antara Pengendalian Gaya dan Pengendalian Posisi?
Memahami perbedaan mendasar antara filosofi kontrol ini sangat penting untuk penerapan teknik yang tepat. ⚙️
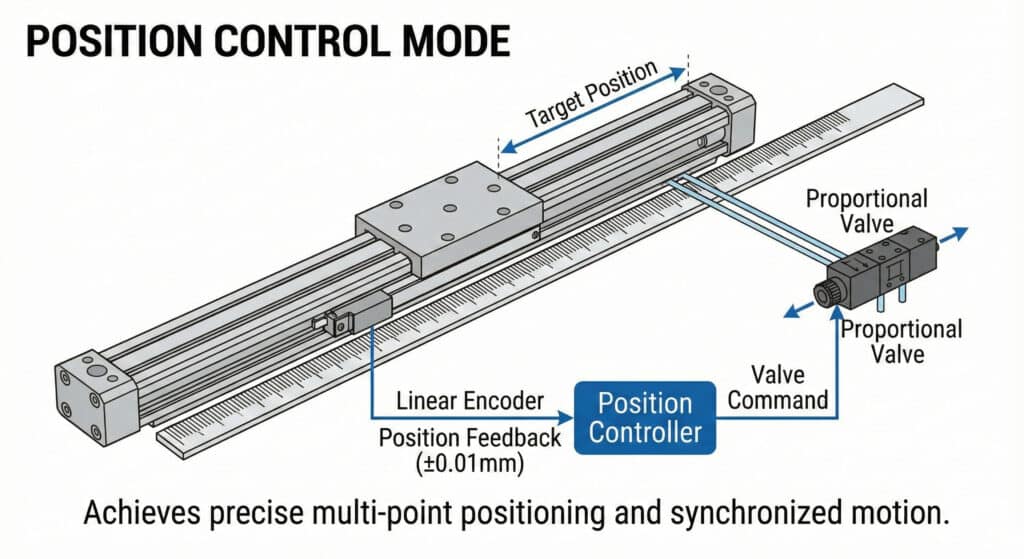
Mode kontrol gaya menggunakan sensor tekanan atau pemantauan arus untuk mengatur gaya keluaran silinder, menjaga gaya dorong/tarik konstan meskipun posisi berubah atau hambatan ditemui. Mode kontrol posisi menggunakan penyandi linier1 atau sensor magnetik untuk melacak dan mengontrol posisi kereta dengan presisi biasanya antara 0,01-0,5 mm, dengan memprioritaskan akurasi posisi daripada konsistensi gaya. Setiap mode mengoptimalkan parameter kinerja yang berbeda berdasarkan persyaratan aplikasi.
Dasar-Dasar Loop Kontrol
Arsitektur Pengendalian Tenaga
Dalam mode kontrol daya, sistem secara terus-menerus memantau:
- Sensor tekananUkur tekanan ruang secara real-time
- Perhitungan gayaF = P × A (tekanan × luas piston)
- Siklus umpan balikMenyesuaikan posisi katup untuk mempertahankan gaya target.
- KepatuhanPosisi silinder bervariasi tergantung pada karakteristik benda kerja.
Pengontrol tidak peduli di mana silinder berada—yang penting adalah silinder tersebut menerapkan gaya yang benar.
Arsitektur Pengendalian Posisi
Sistem kendali posisi berfokus pada lokasi:
- Encoder linierMelacak posisi absolut atau incremental
- Kesalahan posisiMenghitung selisih dari target
- Profil kecepatanMengontrol percepatan dan perlambatan
- Variasi gayaGaya keluaran berubah berdasarkan beban dan gesekan.
Perbandingan Kinerja Utama
| Karakteristik | Kontrol Kekuatan | Kontrol Posisi |
|---|---|---|
| Umpan Balik Utama | Tekanan/Gaya | Posisi/Lokasi |
| Akurasi Khas | ±2-5% gaya target | ±0,01–0,5 mm |
| Tanggapan terhadap Hambatan | Menjaga kekuatan, menghentikan pergerakan | Meningkatkan kekuatan untuk mencapai posisi |
| Terbaik untuk Kepatuhan | Luar biasa | Miskin |
| Pengulangan | Kekuatan: Sangat Baik / Posisi: Variabel | Posisi: Baik / Kekuatan: Variabel |
| Biaya Sistem | Sedang | Sedang-Tinggi |
Di Bepto, kami menyediakan solusi silinder tanpa batang yang cerdas dengan dua mode kontrol, memungkinkan insinyur untuk memilih strategi optimal sesuai dengan aplikasi spesifik mereka. Sistem kami bahkan dapat beralih antara mode selama fase yang berbeda dalam siklus yang sama. 🔄
Persyaratan Sensor
Kebutuhan Pengendalian Tenaga:
- Transduser tekanan (rentang 0-10 bar, tipikal)
- Katup proporsional atau katup servo2 untuk pengaturan tekanan yang presisi
- Siklus kontrol cepat (waktu siklus 1-5 milidetik)
Kebutuhan Pengendalian Posisi:
- Sensor posisi linier (magnetik, optik, atau magnetostriktif)
- Umpan balik beresolusi tinggi (0,01–0,1 mm)
- Profil gerak prediktif untuk percepatan yang halus
Kapan Anda Harus Menggunakan Mode Kontrol Tenaga dalam Aplikasi Pneumatik?
Beberapa aplikasi mutlak memerlukan pengendalian kekuatan untuk kualitas dan keamanan. 🛡️
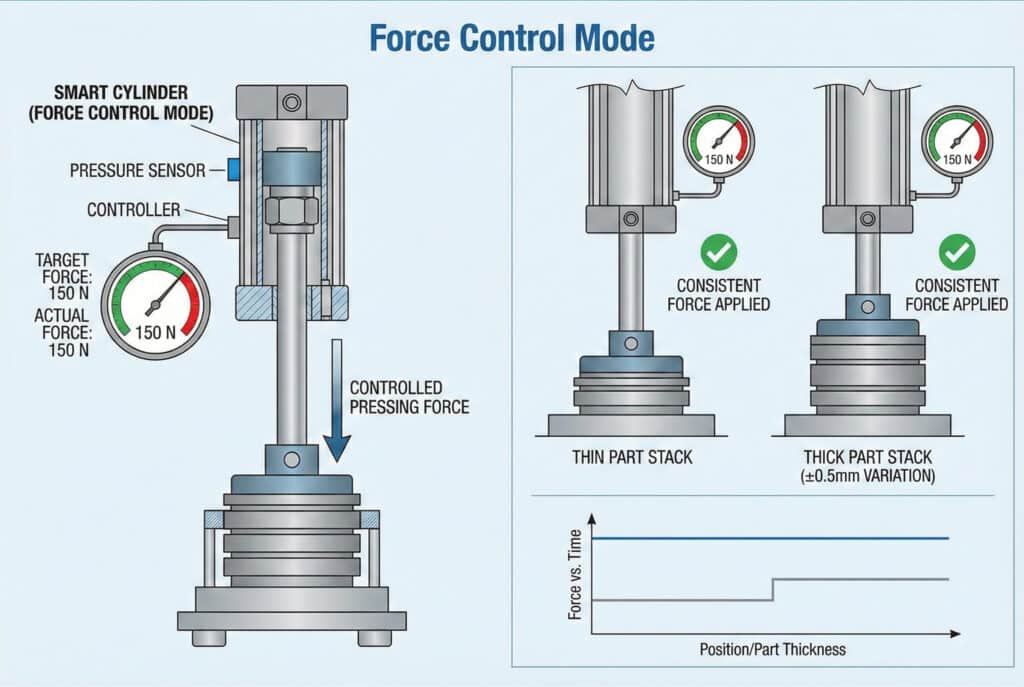
Mode kontrol gaya unggul dalam aplikasi yang memerlukan: gaya tekan yang konsisten terlepas dari variasi ketebalan bagian (toleransi ±0,5 mm), operasi perakitan yang memerlukan fleksibilitas di mana gaya berlebihan dapat menyebabkan kerusakan, dan pengujian jaminan kualitas yang mengukur Kurva gaya-pergeseran3, Penggunaan material dengan sentuhan lembut untuk penanganan produk yang rentan, serta proses adaptif di mana sifat bahan kerja bervariasi. Setiap aplikasi di mana “seberapa keras” lebih penting daripada “tepat di mana” akan diuntungkan oleh pengendalian gaya.
Aplikasi Pengendalian Gaya Ideal
Operasi Perakitan dan Pemampatan
Perakitan press-fit: Pemasangan bantalan, bushing, atau konektor memerlukan kekuatan yang terkontrol untuk menghindari kerusakan. Pengendalian kekuatan memastikan pemasangan yang konsisten tanpa tekanan berlebihan.
Perakitan snap-fitKomponen plastik memerlukan kekuatan yang tepat untuk mengunci klip tanpa merusaknya. Pengendalian kekuatan memberikan “perasaan” yang mencegah cacat.
Tekanan dispensing perekatMenjaga tekanan yang konsisten pada piston dispenser memastikan aliran material yang merata meskipun terjadi perubahan viskositas.
Kisah Sukses Dunia Nyata
Thomas, seorang manajer produksi di pabrik elektronik konsumen di San Jose, California, mengalami tingkat kegagalan 12% pada proses perakitan komponen smartphone. Silinder yang dikendalikan posisi yang digunakannya mendorong komponen ke kedalaman tetap, tetapi variasi ketebalan komponen menyebabkan beberapa bagian menerima gaya yang tidak cukup sementara yang lain retak akibat gaya berlebihan. Setelah beralih ke silinder tanpa batang yang dikendalikan oleh gaya Bepto dengan pengaturan 150N, prosesnya secara otomatis menyesuaikan diri dengan variasi bagian—tingkat cacat turun menjadi 0,8% dan waktu siklus sebenarnya meningkat sebesar 0,2 detik. 📱
Keunggulan Kontrol Tenaga
- Beradaptasi dengan variasi: Secara otomatis menyesuaikan bagian Penumpukan toleransi4
- Mencegah kerusakan: Berhenti meningkatkan gaya saat target tercapai
- Umpan balik yang berkualitasData paksa menyediakan kemampuan pemantauan proses.
- Penanganan yang lembut: Ideal untuk bahan-bahan yang rapuh (kaca, keramik, elektronik)
Kategori Aplikasi
| Industri | Aplikasi Khas | Jarak Jangkauan Pasukan Sasaran | Manfaat Utama |
|---|---|---|---|
| Otomotif | Pemasangan weatherstrip | 50-200 N | Segel yang konsisten tanpa kerusakan |
| Elektronik | Pemasangan komponen PCB | 10-80 N | Mencegah retak pada papan |
| Pengemasan | Penutupan karton | 100-400 N | Menyesuaikan diri dengan variasi tingkat isi |
| Perangkat Medis | Perakitan kateter | 5-30 N | Menjamin integritas tanpa deformasi |
| Pengolahan Makanan | Pengepresan/pembentukan produk | 50-500 N | Pengendalian kepadatan seragam |
Kapan Mode Kontrol Posisi Lebih Baik Dipilih?
Kontrol posisi mendominasi aplikasi di mana presisi lokasi menjadi hal yang paling penting. 🎯
Mode kontrol posisi sangat penting ketika: akurasi posisi absolut dalam rentang ±0.1mm diperlukan, beberapa posisi henti sepanjang stroke dibutuhkan, gerakan sinkron dengan sumbu lain sangat kritis, gerakan titik ke titik berkecepatan tinggi memerlukan profil kecepatan yang dioptimalkan, atau aplikasi melibatkan pengambilan, penempatan, penyortiran, atau transfer material yang presisi. Proses manufaktur yang memerlukan lokasi yang dapat diulang terlepas dari variasi beban akan mendapatkan manfaat terbesar dari kontrol posisi.
Area Keunggulan Pengendalian Posisi
Operasi Pemilihan dan Penempatan
Perakitan robotik dan penanganan material memerlukan silinder untuk bergerak ke lokasi yang tepat secara berulang-ulang:
- Penghenti multi-posisiSatu silinder melayani beberapa stasiun sepanjang pergerakannya.
- Gerakan yang disinkronkan: Berkoordinasi dengan konveyor, robot, atau sumbu lainnya
- Ketepatan tinggi kecepatan: Tetap akurat bahkan pada kecepatan 2+ m/s.
Aplikasi Pemosisian Presisi
Pemuatan mesin perkakas CNCBahan kerja harus sejajar dengan toleransi 0,05 mm untuk akurasi pemesinan.
Perakitan optikPenempatan lensa memerlukan ketepatan pengulangan di bawah 0,1 mm untuk kualitas fokus.
Sistem inspeksiPenempatan kamera memerlukan lokasi yang konsisten untuk analisis gambar.
Optimasi Profil Gerak
Kontrol posisi memungkinkan strategi gerak yang canggih:
- Percepatan kurva S5: Pergerakan mulus saat mulai/berhenti mengurangi guncangan mekanis.
- Pencampuran kecepatanTransisi antara gerakan tanpa berhenti
- Perlengkapan elektronik: Sinkronisasi secara matematis dengan sumbu utama
- Gunting terbangMenyesuaikan kecepatan pemotongan dengan kecepatan pergerakan web.
Keuntungan Pengendalian Posisi
- Ketepatan mutlakMencapai target dalam mikron.
- Kemampuan multi-titik: Tanpa batas pemberhentian sepanjang panjang stroke
- Waktu yang dapat diprediksiKonsistensi waktu siklus untuk perencanaan throughput
- Sinkronisasi: Mengkoordinasikan gerakan multi-sumbu yang kompleks
Spesifikasi Umum
Silinder cerdas tanpa batang modern dengan kontrol posisi menyediakan:
- Akurasi pemosisian±0,05 mm hingga ±0,5 mm tergantung pada sensor
- Pengulangan±0,01 mm untuk sistem magnetostriktif
- Kecepatan maksimum2-3 m/s dengan perlambatan terkendali
- Resolusi0,01 mm atau lebih baik dengan encoder kelas atas.
Silinder tanpa batang yang dikendalikan posisi Bepto kami menawarkan kinerja setara OEM dengan biaya yang jauh lebih rendah, serta kompatibilitas penuh untuk penggantian langsung merek-merek utama. Kami telah membantu puluhan fasilitas meng-upgrade sistem yang sudah tua sambil mengurangi biaya persediaan suku cadang sebesar 35%. 💰
Apakah Anda dapat menggabungkan kedua mode kontrol dalam aplikasi hibrida?
Aplikasi canggih seringkali memerlukan perpindahan antara mode kontrol selama fase siklus yang berbeda. 🔀
Kontrol gaya-posisi hibrida memungkinkan silinder pintar menggunakan kontrol posisi untuk gerakan pendekatan cepat, kemudian beralih ke kontrol gaya untuk operasi kerja sebenarnya, dan kembali ke kontrol posisi untuk penarikan. Kombinasi ini memberikan waktu siklus optimal (posisi cepat) dengan jaminan kualitas (penerapan gaya yang terkontrol). Implementasi memerlukan silinder yang dilengkapi dengan sensor tekanan dan posisi, serta pengontrol yang mampu beralih mode dalam waktu 10-50 milidetik.

Strategi Pengendalian Hibrida
Pengalihan Mode Berurutan
Fase 1 – Pendekatan Cepat (Pengendalian Posisi):
- Bergerak cepat ke posisi hampir bersentuhan.
- Kecepatan tinggi (1,5-2 m/s) untuk optimasi waktu siklus
- Berhenti 2-5 mm sebelum kontak dengan benda kerja.
Fase 2 – Operasi Kerja (Pengendalian Tenaga):
- Beralih ke mode kontrol paksa
- Terapkan gaya tekan/perakitan yang terkontrol
- Monitor kurva gaya-pergeseran untuk kualitas
Fase 3 – Penarikan (Pengendalian Posisi):
- Kembali ke posisi awal atau posisi antara.
- Profil kecepatan yang dioptimalkan untuk siklus berikutnya
Aplikasi Hybrid di Dunia Nyata
Sebuah produsen perangkat medis di Minneapolis, Minnesota, menggunakan strategi yang sama persis untuk perakitan ujung kateter. Silinder pintar Bepto secara cepat berpindah ke stasiun perakitan dalam 0,4 detik (mode posisi), beralih ke mode kekuatan untuk menerapkan tekanan tepat 18N untuk pengelasan panas ujung kateter (0,6 detik), lalu menarik kembali di bawah kendali posisi (0,3 detik). Waktu siklus total: 1,3 detik dengan nol cacat selama lebih dari 2 juta siklus. 🏥
Persyaratan Pelaksanaan
| Komponen | Spesifikasi | Tujuan |
|---|---|---|
| Sensor Ganda | Tekanan + Posisi | Aktifkan kedua mode kontrol |
| Pengendali Cepat | Mode peralihan dalam waktu kurang dari 10 milidetik | Transisi yang mulus |
| Katup Servo/Proporsional | Respon frekuensi tinggi | Mendukung kedua jenis kontrol |
| Perangkat Lunak Lanjutan | Logika mesin negara | Mengelola transisi mode |
Manfaat Pendekatan Hibrida
- Waktu siklus yang dioptimalkanGerakan cepat di mana ketepatan tidak menjadi hal yang kritis.
- Jaminan kualitas: Kekuatan yang terkendali di tempat yang penting
- Pemantauan prosesData posisi dan gaya yang terekam
- Fleksibilitas: Menyesuaikan secara otomatis dengan variasi produk
Kerangka Kerja Keputusan
Gunakan Kontrol Kekuatan Saat:
- Ketebalan/tinggi bagian bervariasi >0,5 mm
- Sifat material tidak konsisten
- Kerusakan akibat penggunaan kekuatan berlebihan mungkin terjadi.
- Kualitas proses bergantung pada penerapan gaya.
Gunakan Kontrol Posisi Saat:
- Ketepatan lokasi absolut sangat penting.
- Diperlukan beberapa posisi pemberhentian.
- Sinkronisasi dengan peralatan lain diperlukan.
- Optimasi waktu siklus memerlukan kecepatan tinggi.
Gunakan Kontrol Hybrid Saat:
- Aplikasi memiliki fase penempatan dan operasional yang terpisah.
- Baik kecepatan maupun kualitas sangat penting.
- Pemantauan proses memerlukan data gaya dan posisi.
- Anggaran memungkinkan penggunaan sistem silinder pintar canggih.
Kesimpulan
Pemilihan antara mode kontrol gaya dan mode kontrol posisi—atau penerapan strategi hibrida—secara langsung memengaruhi kualitas produk, efisiensi siklus, dan kemampuan proses, menjadikan keputusan fundamental ini salah satu yang paling penting dalam desain sistem pneumatik untuk manufaktur modern. 🚀
Pertanyaan Umum tentang Mode Pengendalian Silinder Cerdas
Q: Apakah saya dapat memodifikasi silinder yang sudah ada untuk menambahkan kontrol gaya atau posisi?
Peningkatan sistem tergantung pada desain silinder saat ini. Silinder standar dapat ditingkatkan dengan sensor posisi eksternal (pita magnetik, encoder kabel tarik) untuk pengendalian posisi, tetapi pengendalian gaya memerlukan transduser tekanan di port silinder ditambah pengendalian katup proporsional. Biaya retrofit lengkap biasanya berkisar 60-80% dari harga silinder pintar baru, sehingga penggantian seringkali lebih ekonomis. Bepto menawarkan penggantian silinder pintar tanpa batang yang hemat biaya dan kompatibel dengan antarmuka pemasangan OEM utama.
Q: Seberapa besar akurasi pengendalian gaya bergantung pada stabilitas tekanan udara?
Ketepatan pengendalian gaya berbanding lurus dengan stabilitas tekanan suplai, karena F = P × A. Fluktuasi tekanan ±0,2 bar pada tekanan suplai 6 bar menyebabkan variasi gaya ±3,3%. Untuk aplikasi kritis yang memerlukan ketepatan gaya ±1%, gunakan regulator tekanan dengan stabilitas ±0,05 bar dan pertimbangkan pengendalian tekanan loop tertutup. Pengendalian posisi kurang sensitif terhadap fluktuasi tekanan karena menyesuaikan posisi katup untuk mencapai lokasi target terlepas dari tekanan.
Q: Berapa lama waktu respons yang dapat saya harapkan saat beralih antara mode kontrol?
Pengendali silinder pintar modern beralih mode dalam waktu 10-50 milidetik tergantung pada arsitektur sistem. Respons fisik aktual (perubahan gerakan silinder) membutuhkan waktu tambahan 20-100 milidetik berdasarkan waktu respons katup dan dinamika sistem pneumatik. Untuk aplikasi yang memerlukan peralihan mode yang sering (>5 kali per detik), pastikan pengendali dan katup Anda dirancang untuk operasi frekuensi tinggi guna menghindari penurunan kinerja.
Q: Apakah silinder yang dikendalikan oleh gaya mengonsumsi lebih banyak udara daripada yang dikendalikan oleh posisi?
Kontrol gaya biasanya mengonsumsi 10-20% lebih banyak udara karena secara terus-menerus mengatur tekanan untuk mempertahankan gaya target, sementara kontrol posisi menggunakan tekanan penuh saat bergerak dan kemudian mempertahankan posisi dengan aliran minimal. Namun, kontrol gaya mencegah pemborosan energi akibat tekanan berlebihan, yang dapat mengimbangi perbedaan ini. Konsumsi aktual sangat bergantung pada siklus kerja aplikasi—silakan berkonsultasi dengan tim teknik Bepto kami untuk perhitungan spesifik berdasarkan parameter proses Anda.
Q: Apakah satu silinder pintar dapat mengendalikan baik gaya tarik (menarik) maupun gaya tekan (mendorong)?
Ya, silinder pintar canggih dengan sensor tekanan di kedua ruang dapat mengontrol gaya dalam kedua arah. Hal ini memerlukan dua transduser tekanan dan perhitungan gaya dua arah (F = P₁×A₁ – P₂×A₂ dengan memperhitungkan perbedaan luas batang). Aplikasi seperti pengujian material, pengendalian tegangan web, dan perakitan dua arah dapat memanfaatkan kemampuan ini. Implementasi standar umumnya hanya mengontrol gaya dalam satu arah (biasanya mendorong) untuk mengurangi biaya dan kompleksitas.
-
Panduan yang menjelaskan cara pengkodean linier mengubah gerakan mekanis menjadi sinyal listrik untuk penempatan yang presisi. ↩
-
Ringkasan tentang cara katup proporsional dan katup servo mengatur aliran dan tekanan dalam sistem tenaga fluida. ↩
-
Sumber daya teknis tentang interpretasi kurva gaya-pergeseran untuk menganalisis sifat material dan perilaku mekanis. ↩
-
Panduan teknik tentang analisis penumpukan toleransi dan dampaknya terhadap kesesuaian dan fungsi perakitan. ↩
-
Perbandingan profil gerak yang menjelaskan bagaimana percepatan kurva S mengurangi getaran mekanis dan jerk. ↩
