

Innledning
Har du problemer med å velge riktig kontrollstrategi for din smarte pneumatiske sylinderapplikasjon? 🤔 Mange ingeniører blir forvirret når de skal velge mellom kraftkontroll og posisjonskontroll, noe som kan føre til suboptimal ytelse, produktskader eller ineffektive prosesser. Feil valg kan bety forskjellen mellom jevn drift og kostbare feil.
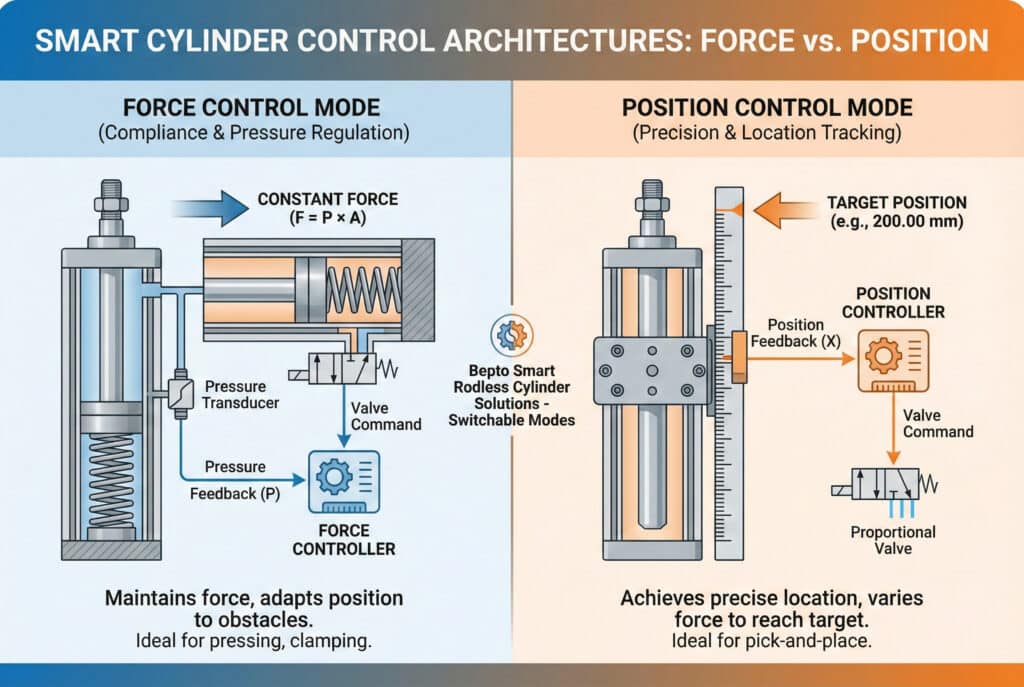
Kraftkontrollmodus regulerer trykket eller kraften som utøves av en smart sylinder for å opprettholde en jevn skyve-/trekkraft uavhengig av posisjon, noe som er ideelt for press-, klem- og monteringsoperasjoner. Posisjonskontrollmodus fokuserer på å oppnå og opprettholde en presis plassering av vognen langs slaglengden, noe som er perfekt for plukk-og-plasser-, sorterings- og posisjoneringsoppgaver. Valget avhenger av om applikasjonen din prioriterer “hvor hardt” (kraft) eller “nøyaktig hvor” (posisjon) sylinderen skal virke.
I forrige måned rådførte jeg meg med Rachel, en prosessingeniør ved en bilfabrikken i Cleveland, Ohio. Teamet hennes brukte posisjonskontroll for montering av dørpaneler, men panelene sprakk på grunn av ujevn kraftpåvirkning. Etter at vi byttet ut hennes Bepto smarte stangløse sylinder til kraftkontrollmodus med trykkfeedback, falt feilprosenten fra 8% til under 0,5%. Det er avgjørende for suksess å forstå når man skal bruke hver modus. 💡
Innholdsfortegnelse
- Hva er den grunnleggende forskjellen mellom kraft- og posisjonskontroll?
- Når bør du bruke kraftkontrollmodus i pneumatiske applikasjoner?
- Når er posisjonskontrollmodus det beste valget?
- Kan du kombinere begge kontrollmodusene i hybridapplikasjoner?
Hva er den grunnleggende forskjellen mellom kraft- og posisjonskontroll?
Det er viktig å forstå den grunnleggende forskjellen mellom disse kontrollfilosofiene for å kunne utføre riktig applikasjonsutvikling. ⚙️
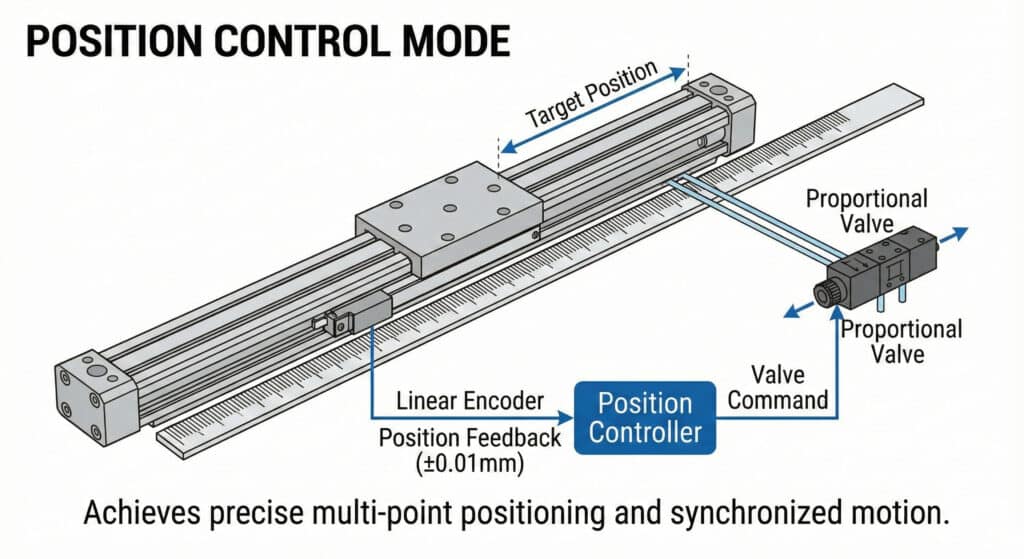
Kraftkontrollmodus bruker trykksensorer eller strømovervåking for å regulere sylinderens utgangskraft, og opprettholder konstant skyvekraft/trekkraft selv når posisjonen endres eller det oppstår hindringer. Posisjonskontrollmodus bruker lineære kodere1 eller magnetiske sensorer for å spore og kontrollere vognens posisjon med en presisjon på typisk mellom 0,01 og 0,5 mm, hvor nøyaktig posisjonering prioriteres fremfor jevn kraft. Hver modus optimaliserer ulike ytelsesparametere basert på applikasjonskravene.
Grunnleggende om reguleringssløyfer
Kraftkontrollarkitektur
I kraftkontrollmodus overvåker systemet kontinuerlig:
- Trykksensorer: Mål kammertrykket i sanntid
- Kraftberegning: F = P × A (trykk × stempelareal)
- Tilbakemeldingssløyfe: Justerer ventilposisjonen for å opprettholde målkraften
- Etterlevelse: Sylinderposisjonen varierer avhengig av arbeidsstykkets egenskaper.
Kontrolleren bryr seg ikke om hvor sylinderen er – bare at den bruker riktig kraft.
Posisjonskontrollarkitektur
Posisjonskontrollsystemer fokuserer på plassering:
- Lineær enkoder: Sporer absolutt eller inkrementell posisjon
- Posisjonsfeil: Beregner forskjellen fra målet
- Hastighetsprofilering: Kontrollerer akselerasjon og retardasjon
- Kraftvariasjon: Utgangskraften endres basert på belastning og friksjon
Sammenligning av nøkkelprestasjoner
| Karakteristisk | Styrkekontroll | Posisjonskontroll |
|---|---|---|
| Primær tilbakemelding | Trykk/kraft | Posisjon/Plassering |
| Typisk nøyaktighet | ±2-5% av målkraft | ±0,01–0,5 mm |
| Respons på hindringer | Opprettholder kraft, slutter å bevege seg | Øker kraften for å nå posisjonen |
| Best for samsvar | Utmerket | Dårlig |
| Repeterbarhet | Kraft: Utmerket / Posisjon: Variabel | Posisjon: Utmerket / Kraft: Variabel |
| Systemkostnad | Moderat | Moderat-høy |
Hos Bepto tilbyr vi smarte stangløse sylinderløsninger med begge kontrollmodusene, slik at ingeniører kan velge den optimale strategien for deres spesifikke anvendelse. Våre systemer kan til og med bytte mellom modusene i forskjellige faser av samme syklus. 🔄
Krav til sensorer
Behov for kraftkontroll:
- Trykktransdusere (typisk område 0–10 bar)
- Proportional- eller servoventiler2 for presis trykkregulering
- Raske reguleringssløyfer (syklustid 1–5 ms)
Behov for posisjonskontroll:
- Lineære posisjonssensorer (magnetiske, optiske eller magnetostriktive)
- Høyoppløselig tilbakemelding (0,01–0,1 mm)
- Prediktive bevegelsesprofiler for jevn akselerasjon
Når bør du bruke kraftkontrollmodus i pneumatiske applikasjoner?
Visse applikasjoner krever absolutt kraftkontroll for kvalitet og sikkerhet. 🛡️
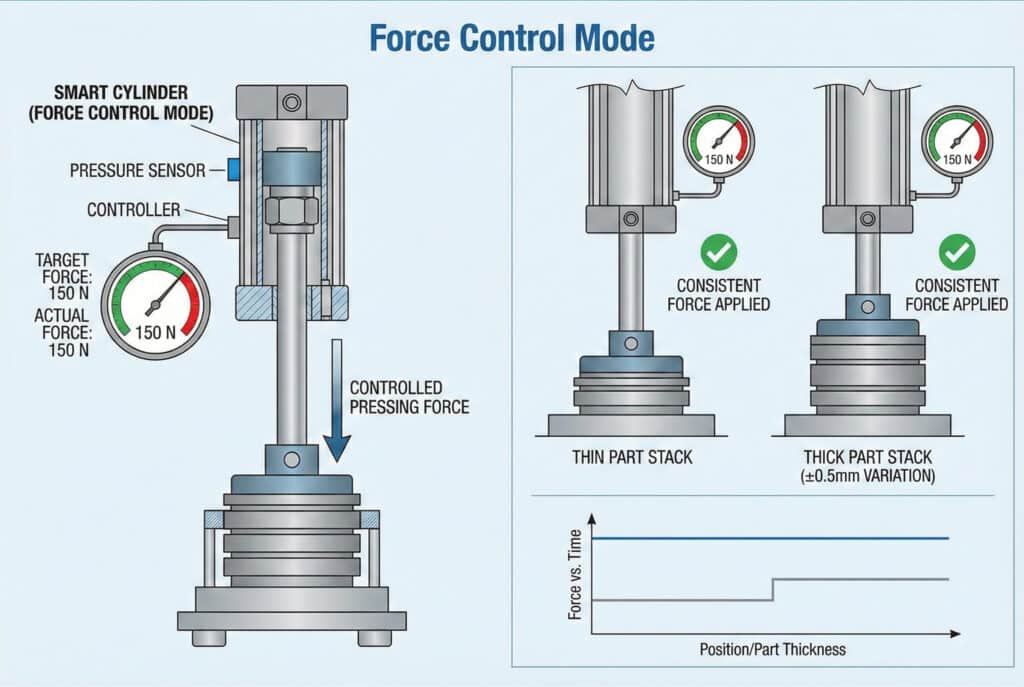
Kraftkontrollmodus er ideell i applikasjoner som krever: jevn trykkraft uavhengig av variasjoner i deltykkelse (±0,5 mm toleranse), kompatible monteringsoperasjoner der overdreven kraft forårsaker skade, kvalitetssikringstesting som måler kraft-forskyvningskurver3, håndtering av delikate produkter med myk berøring og adaptive prosesser der arbeidsstykkets egenskaper varierer. Alle anvendelser der “hvor hardt” er viktigere enn “nøyaktig hvor” drar nytte av kraftkontroll.
Ideelle kraftkontrollapplikasjoner
Montering og pressing
Press-fit-montering: Innsetting av lagre, foringer eller koblinger krever kontrollert kraft for å unngå skader. Kraftkontroll sikrer jevn innsetting uten overpressing.
Snap-fit-montering: Plastkomponenter krever presis kraft for å feste klipsene uten å gå i stykker. Kraftkontroll gir den “følelsen” som forhindrer feil.
Limdoseringstrykk: Ved å opprettholde jevn kraft på dispenseringsstemplene sikres en jevn materialstrøm uavhengig av endringer i viskositeten.
Suksesshistorie fra den virkelige verden
Thomas, produksjonssjef ved en fabrikk for forbrukerelektronikk i San Jose, California, opplevde 12%-feilfrekvenser i en monteringsprosess for smarttelefonkomponenter. Hans posisjonsstyrte sylindere drev komponentene til en fast dybde, men variasjoner i komponenttykkelsen førte til at noen deler ikke fikk tilstrekkelig kraft, mens andre sprakk på grunn av for stor kraft. Etter å ha byttet til Bepto kraftstyrte stangløse sylindere innstilt på 150 N, tilpasset prosessen seg automatisk til delvariasjonene – feilene falt til 0,81 TP3T og syklustiden ble faktisk forbedret med 0,2 sekunder. 📱
Fordeler med kraftkontroll
- Tilpasningsdyktig til variasjon: Kompenserer automatisk for del toleranseakkumuleringer4
- Forhindrer skader: Slutter å øke kraften når målet er nådd
- Tilbakemeldinger om kvalitet: Force-data gir mulighet for prosessovervåking
- Skånsom håndtering: Ideell for skjøre materialer (glass, keramikk, elektronikk)
Applikasjonskategorier
| Industri | Typisk bruksområde | Målkraftområde | Nøkkelfordel |
|---|---|---|---|
| Bilindustrien | Montering av værstriper | 50–200 N | Jevn forsegling uten skader |
| Elektronikk | Innsetting av PCB-komponenter | 10–80 N | Forhindrer sprekker i platen |
| Emballasje | Kartongforsegling | 100–400 N | Tilpasser seg til variasjoner i fyllingsnivået |
| Medisinsk utstyr | Kateteranordning | 5-30N | Sikrer integritet uten deformasjon |
| Matvareforedling | Produktpressing/forming | 50–500 N | Ensartet tetthetskontroll |
Når er posisjonskontrollmodus det beste valget?
Posisjonskontroll dominerer applikasjoner hvor posisjonsnøyaktighet er avgjørende. 🎯
Posisjonskontrollmodus er avgjørende når: absolutt posisjonsnøyaktighet innenfor ±0,1 mm er påkrevd, flere stopp posisjoner langs slaget er nødvendig, synkronisert bevegelse med andre akser er avgjørende, høyhastighets punkt-til-punkt bevegelser krever optimaliserte hastighetsprofiler, eller applikasjonen involverer plukking, plassering, sortering eller presis materialoverføring. Produksjonsprosesser som krever repeterbare posisjoner uavhengig av belastningsvariasjoner, har størst nytte av posisjonskontroll.
Områder med fremragende posisjonskontroll
Pick-and-Place-operasjoner
Robotmontering og materialhåndtering krever at sylindere beveger seg til nøyaktige posisjoner gjentatte ganger:
- Stopp i flere posisjoner: Én sylinder betjener flere stasjoner langs hele slaglengden.
- Synkronisert bevegelse: Koordinater med transportbånd, roboter eller andre akser
- Høy hastighet og nøyaktighet: Opprettholder presisjon selv ved hastigheter på over 2 m/s
Presisjonsposisjoneringsapplikasjoner
CNC-maskinverktøybelastning: Arbeidsstykkene må være justert innenfor 0,05 mm for å oppnå maskineringnøyaktighet.
Optisk montering: Objektivposisjonering krever repeterbarhet på under 0,1 mm for fokusering av høy kvalitet.
Inspeksjonssystemer: Kameraets plassering krever en fast posisjon for bildeanalyse.
Optimalisering av bevegelsesprofil
Posisjonskontroll muliggjør sofistikerte bevegelsesstrategier:
- S-kurveakselerasjon5: Jevn start/stopp reduserer mekanisk støt
- Hastighetsblanding: Overganger mellom bevegelser uten å stoppe
- Elektronisk giring: Synkroniserer matematisk med hovedaksen
- Flygende skjær: Tilpasser seg bevegelseshastigheten til banen under skjæring
Fordeler med posisjonskontroll
- Absolutt nøyaktighet: Når målet innenfor mikrometer
- Flerpunktsfunksjonalitet: Ubegrenset antall stopp langs slaglengden
- Forutsigbar timing: Konsistens i syklustid for gjennomstrømningsplanlegging
- Synkronisering: Koordinerer komplekse bevegelser langs flere akser
Typiske spesifikasjoner
Moderne smarte stangløse sylindere med posisjonskontroll gir:
- Posisjoneringsnøyaktighet: ±0,05 mm til ±0,5 mm, avhengig av sensor
- Repeterbarhet: ±0,01 mm for magnetostriktive systemer
- Maksimal hastighet: 2-3 m/s med kontrollert retardasjon
- Oppløsning: 0,01 mm eller bedre med avanserte kodere
Våre posisjonsstyrte stangløse sylindere fra Bepto gir OEM-ekvivalent ytelse til betydelig lavere kostnader, og er fullt kompatible for direkte erstatning av store merker. Vi har hjulpet dusinvis av anlegg med å oppgradere gamle systemer og samtidig redusere kostnadene for reservedelslager med 35%. 💰
Kan du kombinere begge kontrollmodusene i hybridapplikasjoner?
Avanserte applikasjoner krever ofte bytte mellom kontrollmoduser under ulike sykluser. 🔀
Hybrid kraft-posisjonskontroll gjør det mulig for smarte sylindere å bruke posisjonskontroll for raske tilnærmingsbevegelser, deretter bytte til kraftkontroll for selve arbeidsoperasjonen, og gå tilbake til posisjonskontroll for tilbaketrekking. Denne kombinasjonen gir optimal syklustid (rask posisjonering) med kvalitetssikring (kontrollert kraftpåføring). Implementering krever sylindere med både trykk- og posisjonssensorer samt kontrollere som kan bytte modus innen 10-50 ms.

Hybride kontrollstrategier
Sekvensiell modusbytte
Fase 1 – Rask tilnærming (posisjonskontroll):
- Beveg deg raskt til nærkontaktposisjon
- Høy hastighet (1,5–2 m/s) for optimalisering av syklustiden
- Stopp 2-5 mm før kontakt med arbeidsstykket
Fase 2 – Arbeidsoperasjon (kraftkontroll):
- Bytt til tvangskontrollmodus
- Påfør kontrollert press-/monteringskraft
- Overvåk kraft-forskyvningskurven for kvalitet
Fase 3 – Tilbaketrekking (posisjonskontroll):
- Gå tilbake til startposisjon eller mellomposisjon
- Optimalisert hastighetsprofil for neste syklus
Hybridapplikasjon i virkeligheten
En produsent av medisinsk utstyr i Minneapolis, Minnesota, bruker akkurat denne strategien for montering av kateterspisser. Bepto smart cylinder posisjonerer seg raskt (posisjonsmodus) til monteringsstasjonen på 0,4 sekunder, bytter til kraftmodus for å påføre nøyaktig 18 N for varmestaking av spissen (0,6 sekunder) og trekker seg deretter tilbake under posisjonskontroll (0,3 sekunder). Total syklustid: 1,3 sekunder uten feil over 2 millioner sykluser. 🏥
Implementeringskrav
| Komponent | Spesifikasjon | Formål |
|---|---|---|
| Doble sensorer | Trykk + Posisjon | Aktiver begge kontrollmodusene |
| Rask kontroller | <10 ms modusbytte | Sømløs overgang |
| Servo-/proportjonalventil | Høyfrekvensrespons | Støtter begge kontrolltyper |
| Avansert programvare | Statemaskinlogikk | Administrerer modusoverganger |
Fordeler med hybridtilnærming
- Optimalisert syklustid: Raske bevegelser der presisjon ikke er avgjørende
- Kvalitetssikring: Kontrollert kraft der det teller
- Overvåking av prosesser: Både posisjons- og kraftdata loggført
- Fleksibilitet: Tilpass automatisk til produktvariasjoner
Rammeverk for beslutninger
Bruk kraftkontroll når:
- Delens tykkelse/høyde varierer >0,5 mm
- Materialegenskapene er inkonsekvente
- Skader fra overdreven kraft er mulig
- Prosesskvaliteten avhenger av kraftpåvirkningen
Bruk posisjonskontroll når:
- Absolutt posisjonsnøyaktighet er avgjørende
- Det kreves flere stoppeposisjoner
- Synkronisering med annet utstyr er nødvendig
- Optimalisering av syklustiden krever høy hastighet
Bruk hybridkontroll når:
- Søknaden har tydelige posisjonerings- og arbeidsfaser
- Både hastighet og kvalitet er avgjørende
- Prosessovervåking krever både kraft- og posisjonsdata
- Budsjettet gir rom for avanserte smarte sylindersystemer
Konklusjon
Valget mellom kraftkontroll og posisjonskontroll – eller implementering av hybridstrategier – har direkte innvirkning på produktkvalitet, sykluseffektivitet og prosesskapasitet, noe som gjør denne grunnleggende beslutningen til en av de viktigste i utformingen av pneumatiske systemer for moderne produksjon. 🚀
Ofte stilte spørsmål om smarte sylinderstyringsmoduser
Spørsmål: Kan jeg ettermontere mine eksisterende sylindere for å legge til kraft- eller posisjonskontroll?
Ettermontering avhenger av din nåværende sylinderkonstruksjon. Standard sylindere kan oppgraderes med eksterne posisjonssensorer (magnetiske striper, trådkodere) for posisjonskontroll, men kraftkontroll krever trykktransdusere i sylinderportene samt proporsjonal ventilkontroll. Komplette ettermonteringskostnader utgjør vanligvis 60-80 % av prisen for en ny smart sylinder, så det er ofte mer økonomisk fornuftig å bytte ut den gamle. Bepto tilbyr kostnadseffektive, smarte stangløse sylindererstatninger som er kompatible med de fleste OEM-monteringsgrensesnitt.
Spørsmål: I hvor stor grad avhenger nøyaktigheten av kraftkontrollen av lufttrykkets stabilitet?
Kraftkontrollens nøyaktighet er direkte proporsjonal med tilførselstrykkets stabilitet, siden F = P × A. En trykkvariasjon på ±0,2 bar ved 6 bar tilførsel forårsaker en kraftvariasjon på ±3,31 TP3T. For kritiske applikasjoner som krever en kraftnøyaktighet på ±11 TP3T, bør du bruke trykkregulatorer med en stabilitet på ±0,05 bar og vurdere lukket trykkregulering. Posisjonskontrollen er mindre følsom for trykkvariasjoner, siden den justerer ventilposisjonen for å oppnå målposisjonen uavhengig av trykket.
Spørsmål: Hvilken responstid kan jeg forvente når jeg bytter mellom kontrollmodusene?
Moderne smarte sylinderkontrollere bytter modus på 10–50 ms, avhengig av systemarkitekturen. Den faktiske fysiske responsen (endring i sylinderbevegelse) tar ytterligere 20–100 ms, avhengig av ventilens responstid og det pneumatiske systemets dynamikk. For applikasjoner som krever hyppig modusbytte (>5 ganger per sekund), må du sørge for at kontrolleren og ventilene er klassifisert for høyfrekvent drift for å unngå ytelsesforringelse.
Spørsmål: Bruker kraftstyrte sylindere mer luft enn posisjonsstyrte sylindere?
Kraftkontroll bruker vanligvis 10-20% mer luft fordi den kontinuerlig modulerer trykket for å opprettholde målkraften, mens posisjonskontroll bruker fullt trykk for bevegelser og deretter holder posisjonen med minimal strømning. Kraftkontroll forhindrer imidlertid energisvinn ved overtrykk, noe som kan oppveie denne forskjellen. Det faktiske forbruket avhenger i stor grad av applikasjonens driftssyklus. Kontakt vårt Bepto-ingeniørteam for spesifikke beregninger basert på dine prosessparametere.
Spørsmål: Kan én smart sylinder håndtere både strekkraft (trekkraft) og trykkraft (skyvekraft)?
Ja, avanserte smarte sylindere med trykksensorer i begge kamre kan kontrollere kraften i begge retninger. Dette krever doble trykktransdusere og toveis kraftberegning (F = P₁×A₁ – P₂×A₂ som tar hensyn til forskjeller i stangarealet). Applikasjoner som materialtesting, spenningskontroll og toveis montering drar nytte av denne funksjonen. Standardimplementeringer kontrollerer vanligvis kraften i bare én retning (vanligvis skyving) for å redusere kostnader og kompleksitet.
-
En guide som forklarer hvordan lineære kodere konverterer mekanisk bevegelse til elektriske signaler for presis posisjonering. ↩
-
En oversikt over hvordan proporsjonal- og servoventiler regulerer strømning og trykk i fluidkraftsystemer. ↩
-
En teknisk ressurs for tolkning av kraft-forskyvningskurver for å analysere materialegenskaper og mekanisk oppførsel. ↩
-
En teknisk veiledning om toleranseakkumuleringsanalyse og dens innvirkning på monteringens passform og funksjon. ↩
-
En sammenligning av bevegelsesprofiler som forklarer hvordan S-kurveakselerasjon reduserer mekaniske vibrasjoner og rykk. ↩
