

Introdução
Está com dificuldades para escolher a estratégia de controle correta para a sua aplicação de cilindro pneumático inteligente? Muitos engenheiros se confundem ao decidir entre os modos de controle de força e controle de posição, o que leva a um desempenho abaixo do ideal, danos ao produto ou processos ineficientes. A escolha errada pode significar a diferença entre uma operação tranquila e falhas dispendiosas.
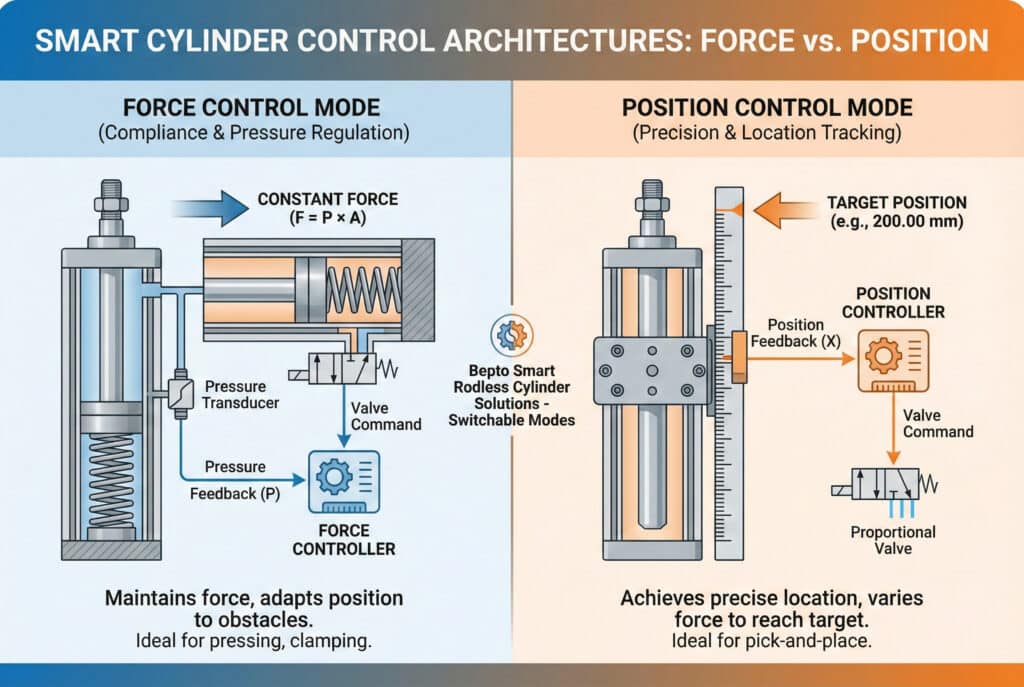
O modo de controle de força regula a pressão ou a saída de força de um cilindro inteligente para manter uma força de empurrar/puxar consistente, independentemente da posição, ideal para operações de prensagem, fixação e montagem. O modo de controle de posição concentra-se em alcançar e manter a localização precisa do carro ao longo do curso, perfeito para tarefas de coleta e colocação, classificação e posicionamento. A escolha depende se sua aplicação prioriza “quão forte” (força) ou “onde exatamente” (posição) o cilindro atua.
No mês passado, prestei consultoria a Rachel, uma engenheira de processos de uma fábrica de montagem automotiva em Cleveland, Ohio. Sua equipe estava usando o controle de posição para um processo de instalação de painel de porta, mas os painéis estavam rachando devido à aplicação inconsistente de força. Depois que mudamos seu cilindro sem haste inteligente Bepto para o modo de controle de força com feedback de pressão, as taxas de defeitos caíram de 8% para menos de 0,5%. Entender quando usar cada modo é fundamental para o sucesso da aplicação. 💡
Índice
- Qual é a diferença fundamental entre o controle de força e o controle de posição?
- Quando se deve usar o modo de controle de força em aplicações pneumáticas?
- Quando o modo de controle de posição é a melhor opção?
- É possível combinar os dois modos de controle em aplicações híbridas?
Qual é a diferença fundamental entre o controle de força e o controle de posição?
Compreender a distinção fundamental entre essas filosofias de controle é essencial para a engenharia de aplicação adequada. ⚙️
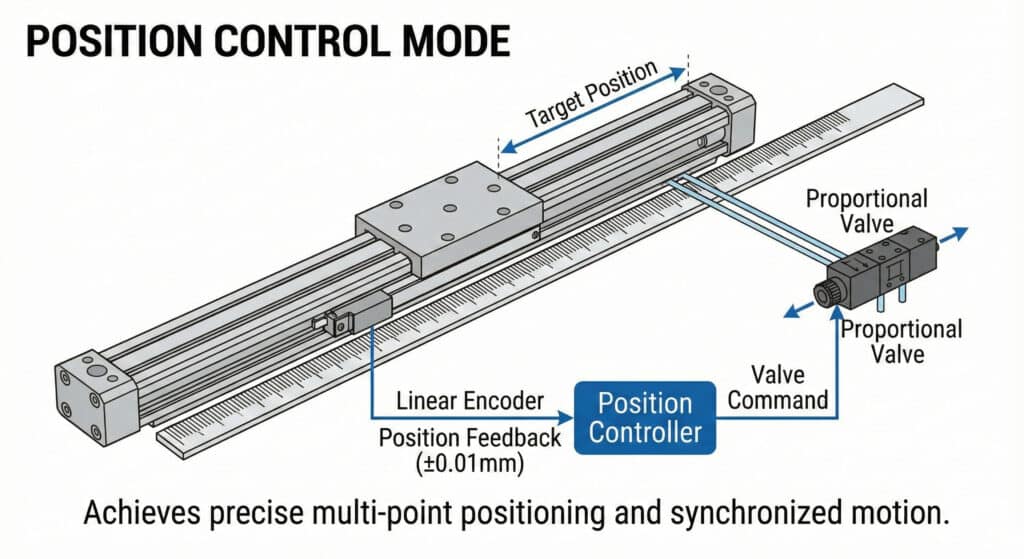
O modo de controle de força usa sensores de pressão ou monitoramento de corrente para regular a força de saída do cilindro, mantendo a força constante de empurrar/puxar mesmo quando há mudanças de posição ou obstáculos. O modo de controle de posição usa codificadores lineares1 ou sensores magnéticos para rastrear e controlar a localização do carro com precisão normalmente entre 0,01 e 0,5 mm, priorizando o posicionamento preciso em relação à consistência da força. Cada modo otimiza diferentes parâmetros de desempenho com base nos requisitos da aplicação.
Fundamentos do circuito de controle
Arquitetura de controle de força
No modo de controle de força, o sistema monitora continuamente:
- Sensores de pressão: Medição da pressão da câmara em tempo real
- Cálculo da força: F = P × A (pressão × área do pistão)
- Loop de feedback: Ajusta a posição da válvula para manter a força-alvo
- Conformidade: A posição do cilindro varia de acordo com as características da peça de trabalho
O controlador não se importa com a localização do cilindro, apenas que ele esteja aplicando a força correta.
Arquitetura de controle de posição
Os sistemas de controle de posição concentram-se na localização:
- Codificador linear: Rastreia a posição absoluta ou incremental
- Erro de posição: Calcula a diferença em relação à meta
- Perfil de velocidade: Controla a aceleração e a desaceleração
- Variação de força: A força de saída muda com base na carga e no atrito
Comparação dos principais desempenhos
| Característica | Controle de força | Controle de posição |
|---|---|---|
| Feedback primário | Pressão/Força | Cargo/Localização |
| Precisão típica | ±2-5% da força alvo | ±0,01-0,5 mm |
| Resposta a obstáculos | Mantém a força, para de se mover | Aumenta a força para alcançar a posição |
| Melhor para conformidade | Excelente | Pobre |
| Repetibilidade | Força: Excelente / Posição: Variável | Posição: Excelente / Força: Variável |
| Custo do sistema | Moderado | Moderado-Alto |
Na Bepto, oferecemos soluções inteligentes de cilindros sem haste com ambos os modos de controle, permitindo que os engenheiros selecionem a estratégia ideal para sua aplicação específica. Nossos sistemas podem até mesmo alternar entre os modos durante diferentes fases do mesmo ciclo. 🔄
Requisitos do sensor
Necessidades de controle da força:
- Transdutores de pressão (faixa típica de 0 a 10 bar)
- Válvulas proporcionais ou servo2 para regulagem precisa da pressão
- Loops de controle rápidos (tempo de ciclo de 1 a 5 ms)
Necessidades de controle de posição:
- Sensores de posição linear (magnéticos, ópticos ou magnetostrictivos)
- Feedback de alta resolução (0,01-0,1 mm)
- Perfis de movimento preditivos para aceleração suave
Quando se deve usar o modo de controle de força em aplicações pneumáticas?
Certas aplicações exigem absolutamente o controle de força para garantir a qualidade e a segurança. 🛡️
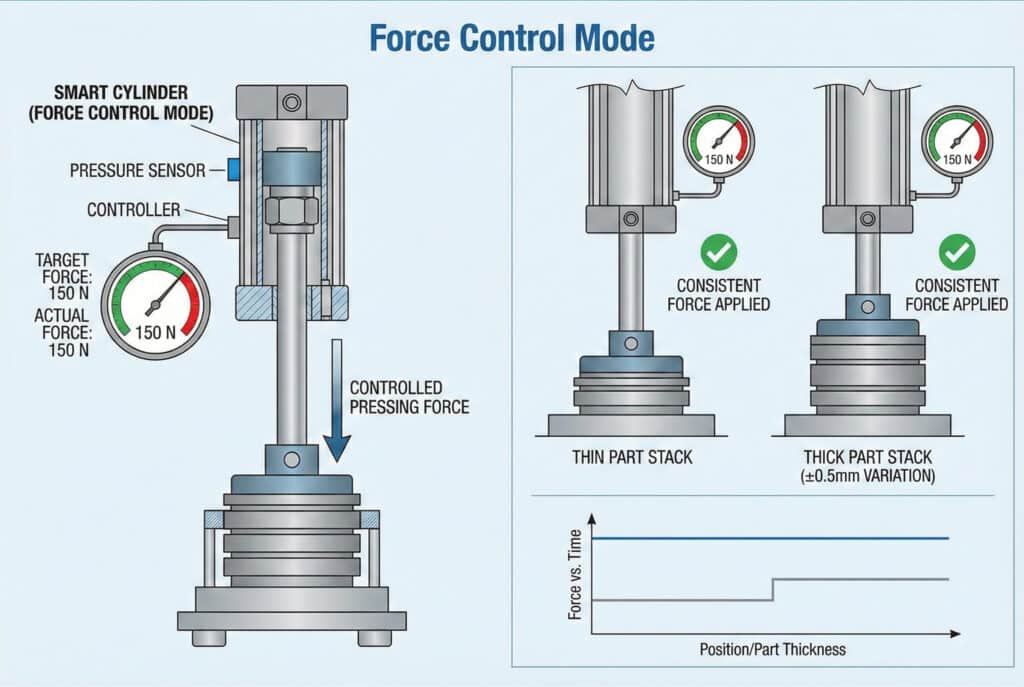
O modo de controle de força é excelente em aplicações que exigem: força de prensagem consistente, independentemente da variação da espessura da peça (tolerância de ±0,5 mm), operações de montagem compatíveis em que a força excessiva causa danos, testes de garantia de qualidade que medem curvas de força-deslocamento3, O controle de força é uma ferramenta de controle de força que pode ser usada em aplicações de controle de força, manuseio de material de toque suave de produtos delicados e processos adaptativos em que as propriedades da peça variam. Qualquer aplicação em que “a força” é mais importante do que “exatamente onde” se beneficia do controle de força.
Aplicações ideais de controle de força
Operações de montagem e prensagem
Montagem com encaixe por pressão: A inserção de rolamentos, buchas ou conectores requer força controlada para evitar danos. O controle de força garante uma inserção consistente sem pressionar demais.
Montagem por encaixe: Os componentes plásticos precisam de força precisa para encaixar os clipes sem quebrar. O controle de força proporciona a “sensação” que evita defeitos.
Pressão de dosagem do adesivo: A manutenção de uma força consistente nos pistões de distribuição garante um fluxo uniforme de material, independentemente das mudanças de viscosidade.
História de sucesso no mundo real
Thomas, gerente de produção de uma fábrica de produtos eletrônicos de consumo em San Jose, Califórnia, estava enfrentando taxas de falha de 12% em um processo de montagem de componentes de smartphones. Seus cilindros controlados por posição estavam conduzindo os componentes a uma profundidade fixa, mas as variações de espessura dos componentes significavam que algumas peças recebiam força insuficiente, enquanto outras rachavam devido à força excessiva. Depois de mudar para cilindros sem haste controlados por força Bepto ajustados para 150N, seu processo se adaptou automaticamente às variações das peças - os defeitos caíram para 0,8% e o tempo de ciclo melhorou em 0,2 segundos. 📱
Vantagens do controle de força
- Adaptação à variação: Compensa automaticamente a peça empilhamento de tolerância4
- Previne danos: Interrompe o aumento da força quando a meta é atingida
- Feedback de qualidade: Os dados de força fornecem capacidade de monitoramento do processo
- Manuseio cuidadoso: Ideal para materiais frágeis (vidro, cerâmica, eletrônicos)
Categorias de aplicativos
| Indústria | Aplicação típica | Faixa de força-alvo | Benefício principal |
|---|---|---|---|
| Automotivo | Instalação de calafetagem | 50-200N | Vedação consistente sem danos |
| Eletrônica | Inserção de componentes de PCB | 10-80N | Evita rachaduras na placa |
| Embalagem | Selagem de caixas de papelão | 100-400N | Adapta-se à variação do nível de enchimento |
| Dispositivo médico | Montagem do cateter | 5-30N | Garante a integridade sem deformação |
| Processamento de Alimentos | Prensagem/formação de produtos | 50-500N | Controle de densidade uniforme |
Quando o modo de controle de posição é a melhor opção?
O controle de posição domina as aplicações em que a precisão da localização é fundamental. 🎯
O modo de controle de posição é essencial quando: é necessária uma precisão de posicionamento absoluta de ±0,1 mm, são necessárias várias posições de parada ao longo do curso, o movimento sincronizado com outros eixos é fundamental, os movimentos ponto a ponto de alta velocidade exigem perfis de velocidade otimizados ou a aplicação envolve coleta, colocação, classificação ou transferência precisa de material. Os processos de fabricação que exigem locais repetíveis, independentemente das variações de carga, são os que mais se beneficiam do controle de posição.
Áreas de excelência de controle de posição
Operações de retirada e colocação
A montagem robótica e o manuseio de materiais exigem que os cilindros se movam repetidamente para locais exatos:
- Batentes de várias posições: Um cilindro atende a várias estações ao longo de seu curso
- Movimento sincronizado: Coordena com transportadores, robôs ou outros eixos
- Precisão em alta velocidade: Mantém a precisão mesmo em velocidades de mais de 2 m/s
Aplicações de posicionamento de precisão
Carregamento de máquinas-ferramentas CNC: As peças de trabalho devem estar alinhadas dentro de 0,05 mm para garantir a precisão da usinagem
Montagem óptica: O posicionamento da lente requer repetibilidade abaixo de 0,1 mm para a qualidade do foco
Sistemas de inspeção: O posicionamento da câmera precisa de um local consistente para a análise da imagem
Otimização do perfil de movimento
O controle de posição permite estratégias de movimento sofisticadas:
- Aceleração da curva S5: A partida/parada suave reduz o choque mecânico
- Combinação de velocidade: Transições entre movimentos sem parar
- Engrenagem eletrônica: Sincroniza matematicamente com o eixo mestre
- Tesoura voadora: Corresponde à velocidade da banda em movimento durante o corte
Vantagens do controle de posição
- Precisão absoluta: Atinge o alvo em mícrons
- Capacidade multiponto: Paradas ilimitadas ao longo do comprimento do curso
- Tempo previsível: Consistência do tempo de ciclo para planejamento da produção
- Sincronização: Coordena movimentos complexos de vários eixos
Especificações típicas
Os modernos cilindros sem haste inteligentes com controle de posição oferecem:
- Precisão de posicionamento: ±0,05mm a ±0,5mm, dependendo do sensor
- Repetibilidade: ±0,01 mm para sistemas magnetostrictivos
- Velocidade máxima2-3 m/s com desaceleração controlada
- Resolução: 0,01 mm ou melhor com codificadores de ponta
Nossos cilindros sem haste com controle de posição Bepto proporcionam desempenho equivalente ao do OEM a um custo significativamente menor, com compatibilidade total para substituição das principais marcas. Ajudamos dezenas de instalações a atualizar sistemas antigos, reduzindo os custos de estoque de peças de reposição em 35%. 💰
É possível combinar os dois modos de controle em aplicações híbridas?
As aplicações avançadas geralmente exigem a alternância entre os modos de controle durante diferentes fases do ciclo. 🔀
O controle híbrido de força e posição permite que os cilindros inteligentes usem o controle de posição para movimentos rápidos de aproximação, depois mudem para o controle de força para a operação de trabalho real e retornem ao controle de posição para retração. Essa combinação proporciona um tempo de ciclo ideal (posicionamento rápido) com garantia de qualidade (aplicação de força controlada). A implementação requer cilindros com sensores de pressão e posição, além de controladores capazes de alternar o modo em 10 a 50 ms.

Estratégias de controle híbrido
Comutação de modo sequencial
Fase 1 - Abordagem rápida (controle de posição):
- Mova-se rapidamente para a posição de quase-contato
- Alta velocidade (1,5-2 m/s) para otimização do tempo de ciclo
- Pare 2-5 mm antes do contato com a peça de trabalho
Fase 2 - Operação de trabalho (controle de força):
- Mudar para o modo de controle de força
- Aplicar força de prensagem/montagem controlada
- Monitorar a curva de força-deslocamento quanto à qualidade
Fase 3 - Retração (controle de posição):
- Retorno à posição inicial ou intermediária
- Perfil de velocidade otimizado para o próximo ciclo
Aplicativo híbrido do mundo real
Um fabricante de dispositivos médicos em Minneapolis, Minnesota, usa essa estratégia exata para a montagem da ponta do cateter. O cilindro inteligente Bepto se posiciona rapidamente (modo de posição) na estação de montagem em 0,4 segundo, muda para o modo de força para aplicar precisamente 18N para fixar a ponta com calor (0,6 segundo) e, em seguida, retrai-se sob controle de posição (0,3 segundo). Tempo total do ciclo: 1,3 segundos com zero defeitos em 2 milhões de ciclos. 🏥
Requisitos de implementação
| Componente | Especificação | Objetivo |
|---|---|---|
| Sensores duplos | Pressão + posição | Habilite os dois modos de controle |
| Controlador rápido | Troca de modo <10ms | Transição perfeita |
| Válvula Servo/Proporcional | Resposta de alta frequência | Suporta ambos os tipos de controle |
| Software avançado | Lógica de máquina de estado | Gerencia as transições de modo |
Benefícios da abordagem híbrida
- Tempo de ciclo otimizado: Movimentos rápidos em que a precisão não é essencial
- Garantia de qualidade: Força controlada onde é importante
- Monitoramento de processos: Dados de posição e força registrados
- Flexibilidade: Adapte-se automaticamente às variações do produto
Estrutura de decisão
Use o controle de força quando:
- A espessura/altura da peça varia >0,5 mm
- As propriedades do material são inconsistentes
- É possível que haja danos causados por força excessiva
- A qualidade do processo depende da aplicação da força
Use o controle de posição quando:
- A precisão absoluta da localização é fundamental
- São necessárias várias posições de parada
- É necessária a sincronização com outros equipamentos
- A otimização do tempo de ciclo exige alta velocidade
Use o controle híbrido quando:
- O aplicativo tem fases distintas de posicionamento e funcionamento
- Tanto a velocidade quanto a qualidade são fundamentais
- O monitoramento do processo requer dados de força e posição
- Orçamento permite sistemas avançados de cilindros inteligentes
Conclusão
A seleção entre os modos de controle de força e de controle de posição - ou a implementação de estratégias híbridas - afeta diretamente a qualidade do produto, a eficiência do ciclo e a capacidade do processo, tornando essa decisão fundamental uma das mais importantes no projeto de sistemas pneumáticos para a fabricação moderna. 🚀
Perguntas frequentes sobre os modos de controle do cilindro inteligente
P: Posso adaptar meus cilindros existentes para adicionar controle de força ou posição?
A adaptação depende do projeto atual de seu cilindro. Os cilindros padrão podem ser atualizados com sensores de posição externos (tiras magnéticas, codificadores de fio de tração) para controle de posição, mas o controle de força exige transdutores de pressão nas portas do cilindro e controle proporcional da válvula. Os custos completos de retrofit normalmente são 60-80% do preço do novo cilindro inteligente, portanto, a substituição geralmente faz mais sentido do ponto de vista econômico. A Bepto oferece substituições econômicas de cilindros inteligentes sem haste compatíveis com as principais interfaces de montagem de OEM.
P: Até que ponto a precisão do controle de força depende da estabilidade da pressão do ar?
A precisão do controle de força é diretamente proporcional à estabilidade da pressão de alimentação, uma vez que F = P × A. Uma flutuação de pressão de ±0,2 bar em uma alimentação de 6 bar causa uma variação de força de ±3,3%. Para aplicações críticas que exigem precisão de força de ±1%, use reguladores de pressão com estabilidade de ±0,05 bar e considere o controle de pressão em circuito fechado. O controle de posição é menos sensível às variações de pressão, pois ajusta a posição da válvula para atingir o local desejado, independentemente da pressão.
P: Qual é o tempo de resposta que posso esperar ao alternar entre os modos de controle?
Os modernos controladores inteligentes de cilindros mudam de modo em 10 a 50 ms, dependendo da arquitetura do sistema. A resposta física real (mudança de movimento do cilindro) leva de 20 a 100 ms adicionais com base no tempo de resposta da válvula e na dinâmica do sistema pneumático. Para aplicações que exigem alternância frequente de modo (>5 vezes por segundo), certifique-se de que seu controlador e suas válvulas sejam classificados para operação em alta frequência para evitar a degradação do desempenho.
P: Os cilindros com controle de força consomem mais ar do que os cilindros com controle de posição?
O controle de força normalmente consome 10-20% mais ar porque modula continuamente a pressão para manter a força-alvo, enquanto o controle de posição usa pressão total para movimentos e, em seguida, mantém a posição com fluxo mínimo. No entanto, o controle de força evita o desperdício de energia da pressão excessiva, o que pode compensar essa diferença. O consumo real depende muito do ciclo de trabalho da aplicação - consulte nossa equipe de engenharia da Bepto para obter cálculos específicos com base nos parâmetros do seu processo.
P: Um cilindro inteligente pode lidar com o controle de força de tração (puxar) e compressão (empurrar)?
Sim, os cilindros inteligentes avançados com sensores de pressão em ambas as câmaras podem controlar a força em ambas as direções. Isso requer transdutores de pressão duplos e cálculo de força bidirecional (F = P₁×A₁ - P₂×A₂ levando em conta as diferenças de área da haste). Aplicativos como teste de materiais, controle de tensão da trama e montagem bidirecional se beneficiam desse recurso. As implementações padrão normalmente controlam a força em apenas uma direção (geralmente empurrando) para reduzir o custo e a complexidade.
-
Um guia que explica como os codificadores lineares convertem o movimento mecânico em sinais elétricos para um posicionamento preciso. ↩
-
Uma visão geral de como as válvulas proporcionais e servo regulam o fluxo e a pressão em sistemas de potência de fluidos. ↩
-
Um recurso técnico sobre a interpretação de curvas de força-deslocamento para analisar propriedades de materiais e comportamentos mecânicos. ↩
-
Um guia de engenharia sobre análise de empilhamento de tolerância e seu impacto no ajuste e na função da montagem. ↩
-
Uma comparação de perfis de movimento que explica como a aceleração da curva S reduz a vibração mecânica e os solavancos. ↩
