

Sissejuhatus
Kas teil on raskusi õige juhtimisstrateegia valimisega oma nutika pneumaatilise silindri rakenduse jaoks? 🤔 Paljud insenerid on segaduses, kui nad peavad valima jõu juhtimise ja asendi juhtimise režiimi vahel, mis viib ebaoptimaalse jõudluse, toote kahjustuste või ebaefektiivsete protsessideni. Vale valik võib tähendada vahet sujuva töö ja kulukate rikete vahel.
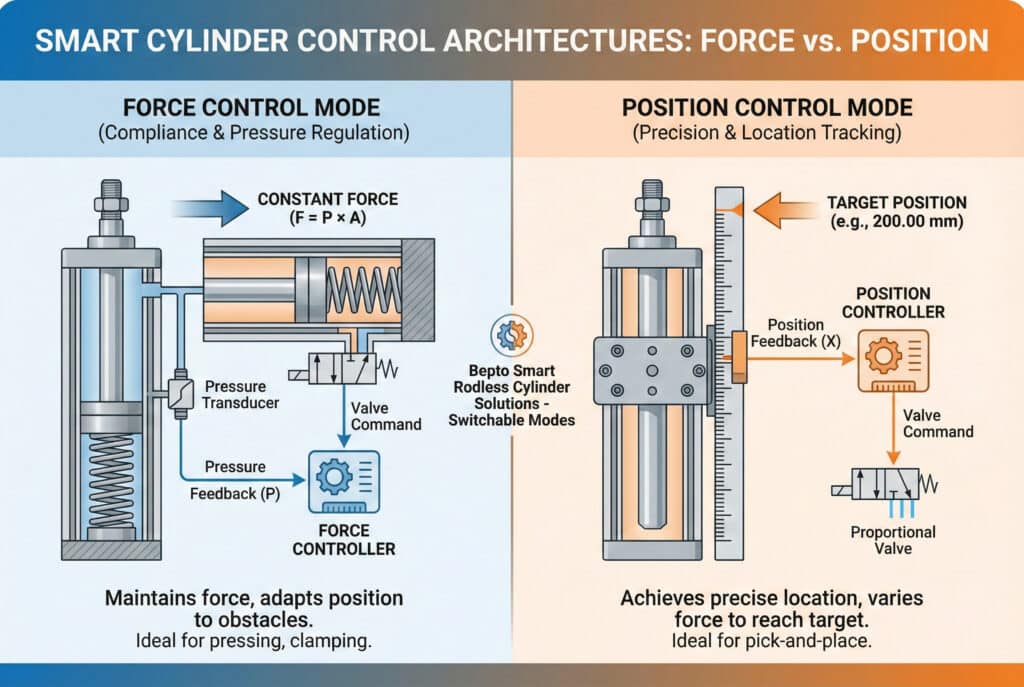
Jõukontrolli režiim reguleerib nutika silindri rõhku või jõudu, et säilitada ühtlane tõuke-/tõmbejõud olenemata asendist, mis on ideaalne pressimis-, kinnitus- ja kokkupanekutoiminguteks. Asukohakontrolli režiim keskendub täpse kanduri asukoha saavutamisele ja säilitamisele töötsükli jooksul, mis on ideaalne korjamis-, sorteerimis- ja positsioneerimistöödeks. Valik sõltub sellest, kas teie rakendus eelistab silindri toimimise “tugevust” (jõudu) või “täpset asukohta” (asukohta).
Eelmisel kuul konsulteerisin Racheliga, protsessiinseneriga autotehases Clevelandis, Ohio osariigis. Tema meeskond kasutas ukse paneeli paigaldamisel positsioonikontrolli, kuid paneelid murdusid ebajärjekindla jõu rakendamise tõttu. Pärast seda, kui vahetasime tema Bepto nutika vardaeta silindri jõukontrolli režiimile rõhu tagasisidega, langes defektide määr 8%-lt alla 0,5%. Rakenduse edukuse seisukohalt on oluline mõista, millal kasutada iga režiimi. 💡
Sisukord
- Mis on jõu ja asendi juhtimise põhiline erinevus?
- Millal tuleks pneumaatilistes rakendustes kasutada jõukontrolli režiimi?
- Millal on positsioonikontrolli režiim parem valik?
- Kas hübriidrakendustes on võimalik kombineerida mõlemat juhtimisrežiimi?
Mis on jõu ja asendi juhtimise põhiline erinevus?
Nende juhtimisfilosoofiate põhilise erinevuse mõistmine on oluline õige rakendusinseneritöö jaoks. ⚙️
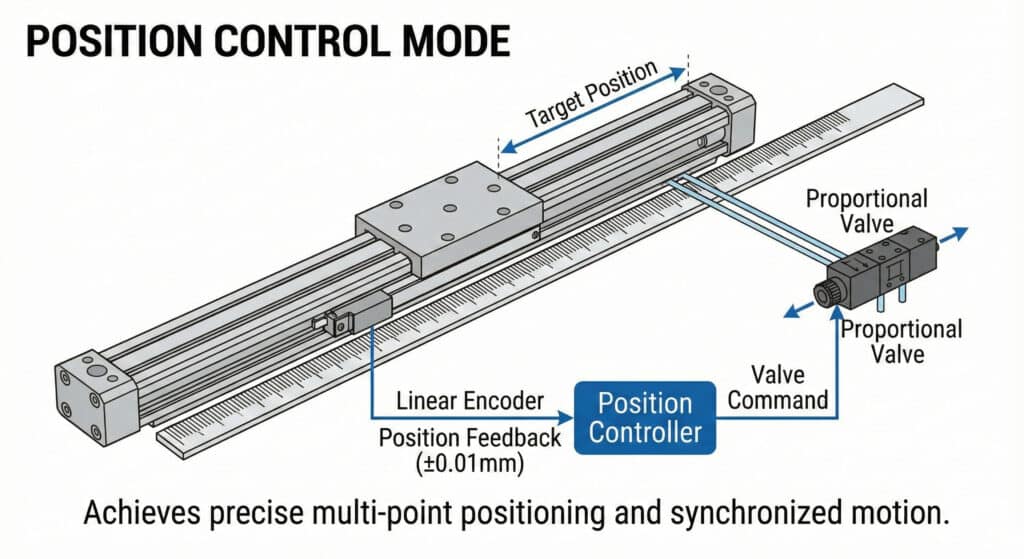
Jõukontrolli režiim kasutab rõhuandureid või voolu jälgimist, et reguleerida silindri väljundjõudu, säilitades konstantse tõuke-/tõmbejõu isegi siis, kui asend muutub või tekivad takistused. Asendikontrolli režiim kasutab lineaarkoodrid1 või magnetandurid, et jälgida ja kontrollida kanduri asukohta täpsusega tavaliselt 0,01–0,5 mm, eelistades täpset positsioneerimist jõu ühtlusele. Iga režiim optimeerib erinevaid jõudlusparameetreid vastavalt rakenduse nõuetele.
Reguleerimisahela põhimõtted
Jõukontrolli arhitektuur
Jõukontrolli režiimis jälgib süsteem pidevalt:
- Rõhuandurid: Mõõda kambri rõhku reaalajas
- Jõu arvutamine: F = P × A (rõhk × kolvi pindala)
- Tagasiside tsükkel: Reguleerib klapi asendit, et säilitada sihtjõud
- Vastavus: Silindri asend varieerub vastavalt töödeldava detaili omadustele.
Kontrollerile ei ole oluline, kus silinder asub – oluline on ainult see, et ta rakendaks õiget jõudu.
Positsioonikontrolli arhitektuur
Asukoha juhtimissüsteemid keskenduvad asukohale:
- Lineaarkooder: Jälgib absoluutset või inkrementaalset asendit
- Positsiooniviga: Arvutab erinevuse sihtmärgist
- Kiiruse profileerimine: Kontrollib kiirendust ja aeglustust
- Jõu varieerumine: Väljundjõud muutub koormuse ja hõõrdumise alusel
Peamiste tulemusnäitajate võrdlus
| Iseloomulikud | Jõu kontroll | Positsioonikontroll |
|---|---|---|
| Esmane tagasiside | Rõhk/jõud | Ametikoht/asukoht |
| Tüüpiline täpsus | ±2-5% sihtjõud | ±0,01–0,5 mm |
| Reageerimine takistustele | Säilitab jõu, peatab liikumise | Suurendab jõudu positsiooni saavutamiseks |
| Parim vastavuse tagamiseks | Suurepärane | Vaene |
| Korratavus | Jõud: Suurepärane / Asend: Muutuva | Asend: Suurepärane / Jõud: Muutuva tugevusega |
| Süsteemi maksumus | Mõõdukas | Mõõdukas-kõrge |
Bepto pakub nutikaid vardaeta silindrilahendusi mõlema juhtimisrežiimiga, mis võimaldab inseneridel valida oma konkreetse rakenduse jaoks optimaalse strateegia. Meie süsteemid võivad isegi sama tsükli erinevate faaside jooksul režiimide vahel vahetada. 🔄
Nõuded andurile
Jõukontrolli vajadused:
- Rõhuandurid (tüüpiline vahemik 0–10 baari)
- Proportsionaalsed või servoventiilid2 täpseks rõhu reguleerimiseks
- Kiired juhtimissilmused (tsükli aeg 1–5 ms)
Positsiooni kontrolli vajadused:
- Lineaarse asendi andurid (magnetilised, optilised või magnetostriktiivsed)
- Kõrge resolutsiooniga tagasiside (0,01–0,1 mm)
- Sujuvaks kiirenduseks mõeldud ennustavad liikumisprofiilid
Millal tuleks pneumaatilistes rakendustes kasutada jõukontrolli režiimi?
Teatud rakendused nõuavad kvaliteedi ja ohutuse tagamiseks tingimata jõukontrolli. 🛡️
Jõukontrolli režiim sobib hästi rakendustes, mis nõuavad: ühtlast surujõudu olenemata detaili paksuse kõikumisest (±0,5 mm tolerants), vastavuses olevaid kokkupanekutoiminguid, kus liigne jõud põhjustab kahjustusi, kvaliteedi tagamise teste, mis mõõdavad jõu-nihe kõverad3, õrnade toodete pehme käitlemine ja kohanduvad protsessid, kus töödeldava detaili omadused varieeruvad. Iga rakendus, kus “kui tugev” on olulisem kui “täpselt kus”, saab kasu jõu kontrollist.
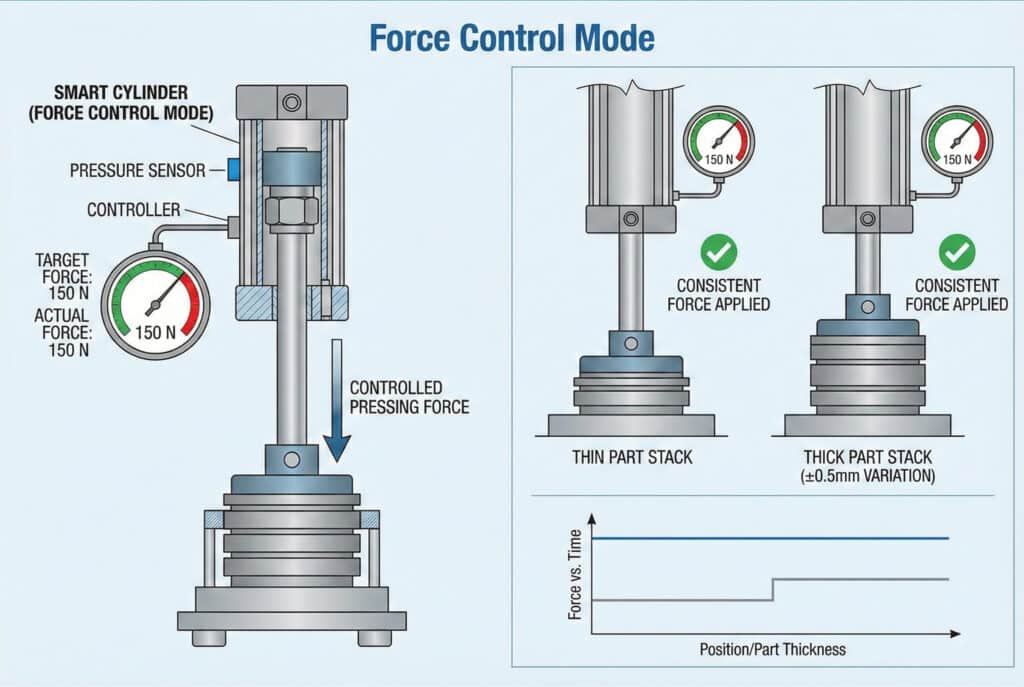
Ideaalne jõukontrolli rakendused
Montaaž ja pressimisoperatsioonid
Press-fit kokkupanek: Laagrite, pukside või ühenduste paigaldamine nõuab kontrollitud jõudu, et vältida kahjustusi. Jõu kontroll tagab ühtlase paigaldamise ilma liigse surveta.
Klõpsuga kinnituv konstruktsioon: Plastkomponentide kinnitamiseks klambritega on vaja täpset jõudu, et need ei puruneks. Jõu kontrollimine annab “tunde”, mis aitab vältida defekte.
Liimi väljastamise rõhk: Pumbapistongute ühtlase jõu säilitamine tagab ühtlase materjalivoo, olenemata viskoossuse muutustest.
Reaalse maailma edulugu
Thomas, tootmisjuht San Jose'i tarbeelektroonika tehases Californias, koges nutitelefoni komponentide kokkupanekuprotsessis 12% rikkeid. Tema positsioonikontrolliga silindrid surusid komponente kindlale sügavusele, kuid komponentide paksuse erinevused tähendasid, et mõned osad said ebapiisava jõu, samas kui teised murdusid liigse jõu tõttu. Pärast üleminekut Bepto jõukontrollitud vardaeta silindritele, mis olid seatud 150 N-le, kohandas tema protsess automaatselt osade erinevustega – defektide määr langes 0,8%-ni ja tsükli aeg paranes tegelikult 0,2 sekundit. 📱
Jõukontrolli eelised
- Kohaneb muutustega: Kompenseerib automaatselt osa tolerantside summeerumine4
- Hoiab ära kahjustused: Lõpetab jõu suurendamise, kui sihtmärk on saavutatud
- Kvaliteedi tagasiside: Force andmed pakuvad protsessi jälgimise võimalust
- Õrn käsitsemine: Ideaalne habraste materjalide (klaas, keraamika, elektroonika) jaoks
Rakenduskategooriad
| Tööstus | Tüüpilised rakendused | Sihtmärgi jõudlusvahemik | Peamine kasu |
|---|---|---|---|
| Autotööstus | Ilmastiku tihendi paigaldamine | 50–200 N | Ühtlane tihendus ilma kahjustusteta |
| Elektroonika | PCB komponendi sisestamine | 10–80 N | Vältib plaadi pragunemist |
| Pakend | Kartongi sulgemine | 100–400 N | Kohandub täitmistaseme muutustega |
| Meditsiiniline seade | Kateteri komplekt | 5–30 N | Tagab terviklikkuse ilma deformatsioonita |
| Toiduainete töötlemine | Toote pressimine/vormimine | 50–500 N | Ühtlane tiheduse kontroll |
Millal on positsioonikontrolli režiim parem valik?
Asukoha kontroll domineerib rakendustes, kus asukoha täpsus on ülimalt oluline. 🎯
Positsioonikontrolli režiim on oluline, kui: on vaja absoluutset positsioneerimistäpsust ±0,1 mm piires, on vaja mitut peatuskohta liigutuse jooksul, on oluline sünkroniseeritud liikumine teiste telgedega, kiired punktist punkti liikumised nõuavad optimeeritud kiirusprofiile või rakendus hõlmab materjali valimist, paigutamist, sorteerimist või täpset ülekandmist. Positsioonikontrollist saavad kõige enam kasu tootmisprotsessid, mis nõuavad korratavaid asukohti olenemata koormuse muutustest.
Positsioonikontrolli tippvaldkonnad
Pick-and-Place operatsioonid
Robotite kokkupanek ja materjalide käitlemine nõuavad silindrite korduvat liikumist täpsetesse asukohtadesse:
- Mitme asendi peatused: Üks silinder teenindab oma töötsükli jooksul mitut jaama.
- Sünkroonitud liikumine: Koordineerib konveierite, robotite või muude telgedega
- Kiire täpsus: Säilitab täpsuse isegi kiirustel üle 2 m/s.
Täpse positsioneerimise rakendused
CNC-tööpingi laadimine: Töödeldavate detailide vaheline kõrvalekalle peab olema kuni 0,05 mm, et tagada töötlemise täpsus.
Optiline komplekt: Objektiivi positsioneerimine nõuab fookuse kvaliteedi tagamiseks korratavust alla 0,1 mm.
Kontrollisüsteemid: Kaamera paigutamine vajab püsivat asukohta pildi analüüsimiseks.
Liikumisprofiili optimeerimine
Asendi juhtimine võimaldab keerukaid liikumisstrateegiaid:
- S-kõvera kiirendus5: Sujuv käivitamine/seiskamine vähendab mehaanilist lööki
- Kiiruse ühendamine: Liikumiste vahelised üleminekud ilma peatumiseta
- Elektrooniline käigukast: Sünkroniseerib matemaatiliselt põhiteljega
- Lendav lõikur: Sobib lõikamise ajal liikuvale veebi kiirusele
Positsioonikontrolli eelised
- Absoluutne täpsus: Jõuab sihtmärgini mikronite täpsusega
- Mitmepunktiline võime: Piiramatu arv peatusi löögi pikkuse ulatuses
- Etteaimatav ajastus: Tsükli aja järjepidevus läbilaskevõime planeerimisel
- Sünkroniseerimine: Koordineerib keerukaid mitme telje liikumisi
Tüüpilised spetsifikatsioonid
Kaasaegsed nutikad vardaeta silindrid positsioonikontrolliga pakuvad:
- Positsioneerimise täpsus: ±0,05 mm kuni ±0,5 mm, sõltuvalt andurist
- Korratavus: ±0,01 mm magnetostriktiivsetele süsteemidele
- Maksimaalne kiirus: 2–3 m/s kontrollitud aeglustamisega
- Resolutsioon: 0,01 mm või parem koos tippklassi kodeerijatega
Meie Bepto positsioonikontrolliga vardaeta silindrid pakuvad OEM-iga võrdväärset jõudlust oluliselt madalamate kuludega ning on täielikult ühilduvad peamiste brändide asendamiseks. Oleme aidanud kümnetel rajatistel vananenud süsteeme uuendada, vähendades samal ajal varuosade laoseisu kulusid 35% võrra. 💰
Kas hübriidrakendustes on võimalik kombineerida mõlemat juhtimisrežiimi?
Kõrgtasemelised rakendused nõuavad sageli erinevate tsükli faaside ajal juhtimismooduste vahel vahetamist. 🔀
Hübriidne jõu-asendi juhtimine võimaldab nutikatele silindritel kasutada asendi juhtimist kiireks lähenemiseks, seejärel lülitada üle jõu juhtimisele tegeliku töö tegemiseks ja naasta asendi juhtimisele tagasitõmbumiseks. See kombinatsioon tagab optimaalse tsükli aja (kiire positsioneerimine) ja kvaliteedi tagamise (kontrollitud jõu rakendamine). Rakendamiseks on vaja silindreid, millel on nii rõhu- kui ka asendiandurid, ning kontrollerid, mis suudavad režiimi vahetada 10–50 ms jooksul.

Hübriidjuhtimisstrateegiad
Järkjärguline režiimi vahetamine
1. etapp – kiire lähenemine (positsiooni kontroll):
- Liigu kiiresti lähedale kontaktpositsioonile
- Kõrge kiirus (1,5–2 m/s) tsükli aja optimeerimiseks
- Peatu 2–5 mm enne tööeseme puudutamist.
2. etapp – tööoperatsioon (jõukontroll):
- Lülitu jõukontrolli režiimile
- Rakenda kontrollitud surumis-/kokkupanemisjõudu
- Jälgige kvaliteedi tagamiseks jõu-nihe kõverat
3. faas – tagasitõmbumine (positsiooni kontroll):
- Tagasi algasendisse või vaheasendisse
- Optimeeritud kiirusprofiil järgmiseks tsükliks
Reaalmaailma hübriidrakendus
Minnesotas Minneapolises asuv meditsiiniseadmete tootja kasutab seda strateegiat kateetri otsa kokkupanekuks. Bepto nutikas silinder liigub kiiresti (positsioneerimisrežiimis) kokkupaneku jaama 0,4 sekundiga, lülitub jõurežiimile, et rakendada täpselt 18 N otsa kuumkleepimiseks (0,6 sekundit), seejärel tõmbub positsioneerimiskontrolli all tagasi (0,3 sekundit). Kogu tsükli aeg: 1,3 sekundit, üle 2 miljoni tsükli jooksul ühtegi defekti. 🏥
Rakendamise nõuded
| Komponent | Spetsifikatsioon | Eesmärk |
|---|---|---|
| Kaheandurilised andurid | Rõhk + asend | Luba mõlemad juhtimisrežiimid |
| Kiire kontroller | <10 ms režiimi vahetamine | Sujuv üleminek |
| Servo-/proportsionaalventiil | Kõrgsageduslik vastus | Toetab mõlemat juhtimistüüpi |
| Täiustatud tarkvara | Riikliku masina loogika | Haldab režiimide üleminekuid |
Hübriidse lähenemise eelised
- Optimeeritud tsükli aeg: Kiired liigutused, kus täpsus ei ole oluline
- Kvaliteedi tagamine: Kontrollitud jõud seal, kus see on oluline
- Protsessi jälgimine: Registreeritud nii asendi- kui ka jõuandmed
- Paindlikkus: Kohandub automaatselt tootevariatsioonidega
Otsuse raamistik
Kasutage jõukontrolli järgmistel juhtudel:
- Osa paksus/kõrgus varieerub >0,5 mm
- Materjali omadused on ebajärjekindlad
- Ülemäärase jõu kasutamisest tulenev kahju on võimalik
- Protsessi kvaliteet sõltub jõu rakendamisest
Kasutage positsioonikontrolli järgmistel juhtudel:
- Absoluutne asukoha täpsus on kriitilise tähtsusega
- Vaja on mitut peatuskohta
- Vaja on sünkroniseerimist teiste seadmetega
- Tsükli aja optimeerimine nõuab suurt kiirust
Kasutage hübriidjuhtimist, kui:
- Rakendusel on selged positsioneerimis- ja tööetapid.
- Nii kiirus kui ka kvaliteet on üliolulised.
- Protsessi jälgimine nõuab nii jõu kui ka asukoha andmeid.
- Eelarve võimaldab kasutada täiustatud nutikaid silindrisüsteeme
Kokkuvõte
Jõukontrolli ja positsioonikontrolli režiimide vahel valimine – või hübriidstrateegiate rakendamine – mõjutab otseselt toote kvaliteeti, tsükli efektiivsust ja protsessi võimekust, mistõttu on see põhimõtteline otsus üks tähtsamaid kaasaegse tootmise pneumaatiliste süsteemide projekteerimisel. 🚀
Korduma kippuvad küsimused nutika silindri juhtimise režiimide kohta
K: Kas ma saan oma olemasolevaid silindreid moderniseerida, et lisada jõu- või asendi juhtimist?
Järelpaigaldamine sõltub teie praeguse silindri konstruktsioonist. Standardseid silindreid saab täiustada väliste positsioonisensoritega (magnetribad, tõmbejuhtme kodeerijad) positsiooni juhtimiseks, kuid jõu juhtimiseks on vaja silindri avades rõhuandureid ja proportsionaalset ventiili juhtimist. Täieliku ümberehituse maksumus on tavaliselt 60–80% uue nutika silindri hinnast, seega on asendamine sageli majanduslikult mõttekam. Bepto pakub kulutõhusaid nutikaid varraseta silindrite asendusi, mis on ühilduvad peamiste OEM-i paigaldusliidestega.
K: Kui palju sõltub jõu kontrolli täpsus õhurõhu stabiilsusest?
Jõukontrolli täpsus on otseselt proportsionaalne toite rõhu stabiilsusega, kuna F = P × A. 6 baari toite rõhu ±0,2 baari kõikumine põhjustab ±3,3% jõu kõikumise. Kriitiliste rakenduste puhul, mis nõuavad ±1% jõu täpsust, kasutage rõhuregulaatoreid, mille stabiilsus on ±0,05 baari, ja kaaluge suletud ahela rõhukontrolli kasutamist. Asukohakontroll on rõhu kõikumistele vähem tundlik, kuna see reguleerib ventiili asendit, et saavutada sihtasukoht rõhust sõltumata.
K: Millist reageerimisaega võin oodata juhtimismooduste vahel ümberlülitamisel?
Kaasaegsed nutikad silindri kontrollerid lülituvad režiimide vahel 10–50 ms jooksul, sõltuvalt süsteemi arhitektuurist. Tegelik füüsiline reaktsioon (silindri liikumise muutus) võtab lisaks 20–100 ms, sõltuvalt ventiili reaktsiooniajast ja pneumaatilise süsteemi dünaamikast. Rakenduste puhul, mis nõuavad sagedast režiimide vahetamist (>5 korda sekundis), veenduge, et teie kontroller ja ventiilid on mõeldud kõrgsageduslikuks tööks, et vältida jõudluse halvenemist.
K: Kas jõukontrolliga silindrid tarbivad rohkem õhku kui positsioonikontrolliga silindrid?
Jõukontroll tarbib tavaliselt 10–20% rohkem õhku, kuna see moduleerib pidevalt rõhku, et säilitada sihtjõud, samas kui positsioonikontroll kasutab liikumiseks täisrõhku ja hoiab seejärel positsiooni minimaalse vooluga. Jõukontroll hoiab ära ülerõhu tekitatud energiakadu, mis võib selle erinevuse kompenseerida. Tegelik tarbimine sõltub suuresti rakenduse töötsüklist – konsulteerige meie Bepto insenerimeeskonnaga, et saada konkreetseid arvutusi teie protsessiparameetrite alusel.
K: Kas üks nutikas silinder suudab kontrollida nii tõmbe- (tõmbamine) kui ka surujõudu (surumine)?
Jah, mõlemas kambris rõhuanduritega varustatud täiustatud nutikad silindrid suudavad kontrollida jõudu mõlemas suunas. Selleks on vaja kahepoolseid rõhuandureid ja kahesuunalist jõu arvutamist (F = P₁×A₁ – P₂×A₂, arvestades varraste pindala erinevusi). Sellest võimest saavad kasu sellised rakendused nagu materjalide katsetamine, veebi pinguse kontroll ja kahesuunaline kokkupanek. Standardrakendused kontrollivad jõudu tavaliselt ainult ühes suunas (tavaliselt surudes), et vähendada kulusid ja keerukust.
-
Juhend, mis selgitab, kuidas lineaarsed kodeerijad muudavad mehaanilise liikumise elektrilisteks signaalideks täpse positsioneerimise jaoks. ↩
-
Ülevaade sellest, kuidas proportsionaalsed ja servoventiilid reguleerivad voolu ja rõhku hüdraulilistes süsteemides. ↩
-
Tehniline ressurss jõu-nihe kõverate tõlgendamiseks materjalide omaduste ja mehaanilise käitumise analüüsimiseks. ↩
-
Tehniline juhend tolerantside summeerumise analüüsi ja selle mõju kohta kokkupaneku sobivusele ja funktsionaalsusele. ↩
-
Liikumisprofiilide võrdlus, mis selgitab, kuidas S-kurvi kiirendus vähendab mehaanilist vibratsiooni ja tõukeid. ↩
