

Bevezetés
Nehézséget okoz a megfelelő vezérlési stratégia kiválasztása az intelligens pneumatikus henger alkalmazásához? 🤔 Sok mérnöknek nehézséget okoz a választás az erővezérlés és a pozícióvezérlés között, ami nem optimális teljesítményhez, termékkárosodáshoz vagy hatékonytalan folyamatokhoz vezethet. A rossz választás a zökkenőmentes működés és a költséges meghibásodások közötti különbséget jelentheti.
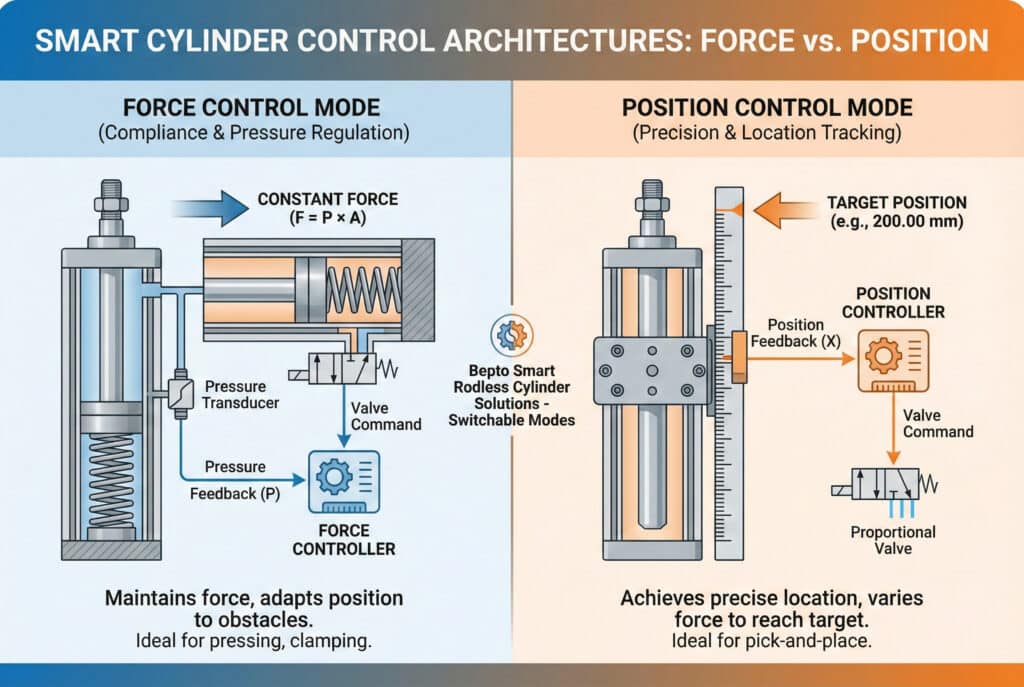
Az erőszabályozási mód szabályozza az intelligens henger nyomását vagy erőteljesítményét, hogy pozíciótól függetlenül állandó toló-/húzóerőt biztosítson, ami ideális préselési, szorítási és összeszerelési műveletekhez. A pozíciószabályozási mód a löket mentén a pontos kocsihelyzet elérésére és fenntartására összpontosít, ami tökéletes pick-and-place, válogatási és pozicionálási feladatokhoz. A választás attól függ, hogy az alkalmazásában az a fontosabb, hogy a henger “milyen erővel” (erő) vagy “pontosan hol” (pozíció) hat.
A múlt hónapban konzultáltam Rachel-lel, aki folyamatmérnök egy clevelandi autógyárban dolgozik. Csapata pozícióvezérlést használt az ajtópanelek beszerelési folyamatához, de a panelek repedtek az egyenetlen erőhatás miatt. Miután átállítottuk a Bepto intelligens rúd nélküli hengerét nyomásvisszacsatolásos erővezérléses üzemmódra, a hibaarány 8%-ről 0,5% alá csökkent. Az egyes üzemmódok megfelelő használata elengedhetetlen az alkalmazás sikeréhez. 💡
Tartalomjegyzék
- Mi a alapvető különbség az erő és a pozíció vezérlés között?
- Mikor érdemes a nyomásszabályozó módot használni pneumatikus alkalmazásokban?
- Mikor érdemesebb a pozícióvezérlési módot választani?
- Kombinálhatók-e mindkét vezérlési mód hibrid alkalmazásokban?
Mi a alapvető különbség az erő és a pozíció vezérlés között?
A megfelelő alkalmazás-tervezéshez elengedhetetlenül fontos megérteni ezeknek a vezérlési filozófiáknak a lényegi különbségét. ⚙️
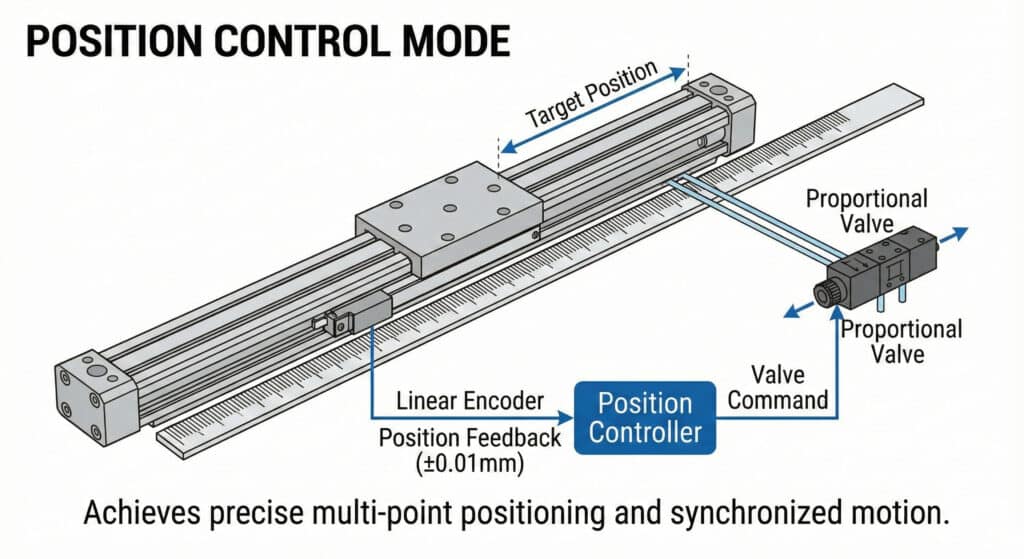
Az erőszabályozási mód nyomásérzékelőket vagy áramfigyelést használ a henger kimeneti erejének szabályozásához, így állandó toló-/húzóerőt biztosít akkor is, ha a helyzet megváltozik vagy akadályokba ütközik. A pozíciószabályozási mód lineáris kódolók1 vagy mágneses érzékelőkkel, amelyek 0,01–0,5 mm-es pontossággal követik és szabályozzák a kocsi helyzetét, előtérbe helyezve a pontos pozicionálást az erő állandóságával szemben. Minden üzemmód az alkalmazás követelményei alapján optimalizálja a különböző teljesítményparamétereket.
A vezérlő hurok alapjai
Erőszabályozó architektúra
Erőszabályozási módban a rendszer folyamatosan figyeli:
- Nyomásérzékelők: Mérje a kamra nyomását valós időben
- Erőszámítás: F = P × A (nyomás × dugattyú felülete)
- Visszacsatolási hurok: Beállítja a szelep helyzetét a célerő fenntartása érdekében
- Megfelelés: A henger pozíciója a munkadarab jellemzőitől függően változik.
A vezérlő nem törődik azzal, hogy a henger hol van, csak azzal, hogy a megfelelő erőt fejti ki.
Pozícióvezérlő architektúra
A pozícióvezérlő rendszerek a helyre koncentrálnak:
- Lineáris kódoló: Abszolút vagy inkrementális pozíciót követ nyomon
- Pozíciós hiba: Kiszámítja a céltól való eltérést
- Sebességprofilozás: Az gyorsulás és lassulás szabályozása
- Erőváltozás: A kimeneti erő a terhelés és a súrlódás alapján változik.
Főbb teljesítmények összehasonlítása
| Jellemző | Erőszabályozás | Pozíció-ellenőrzés |
|---|---|---|
| Elsődleges visszajelzés | Nyomás/Erő | Pozíció/Hely |
| Tipikus pontosság | ±2-5% célerő | ±0,01–0,5 mm |
| Válasz az akadályokra | Fenntartja az erőt, megállítja a mozgást | Növeli az erőhatást a pozíció eléréséhez |
| A legjobb a megfeleléshez | Kiváló | Szegény |
| Ismételhetőség | Erő: Kiváló / Pozíció: Változó | Pozíció: Kiváló / Erő: Változó |
| Rendszerköltség | Mérsékelt | Közepes-magas |
A Bepto intelligens, rúd nélküli hengeres megoldásokat kínál mindkét vezérlési móddal, így a mérnökök kiválaszthatják az adott alkalmazáshoz legmegfelelőbb stratégiát. Rendszereink még ugyanazon ciklus különböző fázisaiban is képesek átváltani a módok között. 🔄
Érzékelő követelmények
Erőszabályozási igények:
- Nyomásérzékelők (tipikus tartomány: 0–10 bar)
- Arányos vagy szervo szelepek2 a pontos nyomásszabályozáshoz
- Gyors szabályozó hurkok (1-5 ms ciklusidő)
Pozícióvezérlés igényei:
- Lineáris pozícióérzékelők (mágneses, optikai vagy magnetostrikciós)
- Nagy felbontású visszacsatolás (0,01–0,1 mm)
- Prediktív mozgásprofilok a sima gyorsuláshoz
Mikor érdemes a nyomásszabályozó módot használni pneumatikus alkalmazásokban?
Bizonyos alkalmazásoknál a minőség és a biztonság érdekében feltétlenül szükséges az erőszabályozás. 🛡️
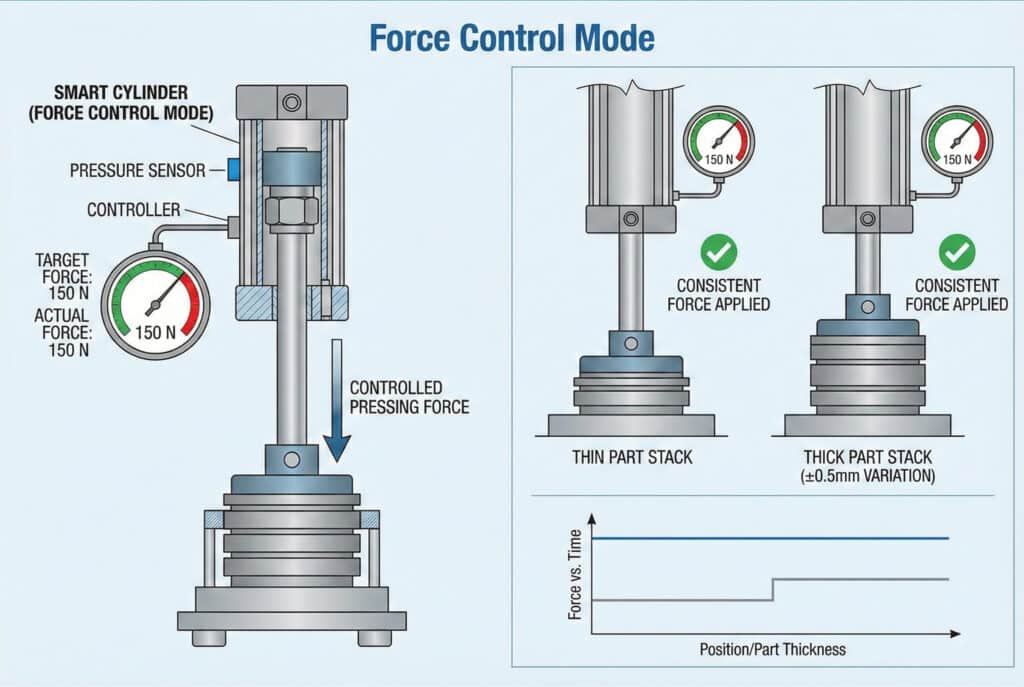
Az erővezérlési mód kiválóan alkalmas olyan alkalmazásokhoz, amelyeknél a következőkre van szükség: állandó nyomóerő a rész vastagságának eltéréseitől függetlenül (±0,5 mm tűrés), olyan szerelési műveletek, ahol a túlzott erő károsodást okozhat, minőségbiztosítási tesztelés, amely méri erő-elmozdulás görbék3, finom tapintású anyagok kezelése, valamint adaptív folyamatok, ahol a munkadarabok tulajdonságai változnak. Bármely olyan alkalmazás, ahol a “milyen erősen” fontosabb, mint a “pontosan hol”, profitál az erőszabályozásból.
Ideális erőszabályozási alkalmazások
Összeszerelés és préselési műveletek
Sajtolt illesztés: A csapágyak, perselyek vagy csatlakozók behelyezése során a sérülések elkerülése érdekében szabályozott erő alkalmazása szükséges. Az erőszabályozás biztosítja az egyenletes behelyezést túlzott nyomásgyakorlás nélkül.
Pattintható szerelés: A műanyag alkatrészekhez pontos erő szükséges a kapcsok meghibásodás nélküli rögzítéséhez. Az erőszabályozás biztosítja azt az “érzést”, amely megakadályozza a hibák kialakulását.
Ragasztó adagolási nyomás: Az adagoló dugattyúkon egyenletes erő fenntartása biztosítja az egyenletes anyagáramlást, függetlenül a viszkozitás változásától.
Valós világbeli sikertörténet
Thomas, egy kaliforniai San Jose-i fogyasztói elektronikai gyár termelési vezetője, 12% hibaarányt tapasztalt egy okostelefon-alkatrész összeszerelési folyamatában. Pozícióvezérelt hengerei az alkatrészeket egy meghatározott mélységig hajtották, de az alkatrészek vastagságának eltérései miatt egyes alkatrészek nem kaptak elegendő erőt, míg mások a túlzott erő hatására megrepedtek. Miután áttért a 150 N-ra beállított Bepto erővezérelt rúd nélküli hengerekre, a folyamat automatikusan alkalmazkodott az alkatrészek eltéréseihez – a hibák aránya 0,81 TP3T-re csökkent, a ciklusidő pedig 0,2 másodperccel javult. 📱
Erőszabályozás előnyei
- Változásokhoz alkalmazkodó: Automatikusan kompenzálja az alkatrészt tolerancia-összeadódások4
- Megakadályozza a károsodást: A cél elérése után leállítja az erő növelését.
- Minőségi visszajelzés: Az erőadatok folyamatfigyelési képességet biztosítanak.
- Kíméletes kezelés: Ideális törékeny anyagokhoz (üveg, kerámia, elektronika)
Alkalmazási kategóriák
| Iparág | Tipikus alkalmazás | Célerő-tartomány | Kulcselőny |
|---|---|---|---|
| Autóipar | Időjárásálló szigetelés felszerelése | 50–200 N | Károsodásmentes, tartós tömítés |
| Elektronika | PCB alkatrész behelyezése | 10–80 N | Megakadályozza a deszka repedését |
| Csomagolás | Kartonlezárás | 100–400 N | Alkalmazkodik a töltési szint változásához |
| Orvostechnikai eszköz | Katéter szerelvény | 5-30N | Biztosítja az integritást deformáció nélkül |
| Élelmiszer-feldolgozás | Termék préselés/formázás | 50–500 N | Egyenletes sűrűségszabályozás |
Mikor érdemesebb a pozícióvezérlési módot választani?
A pozícióvezérlés azokban az alkalmazásokban dominál, ahol a helymeghatározás pontossága elengedhetetlen. 🎯
A pozícióvezérlési mód elengedhetetlen, ha: ±0,1 mm-en belüli abszolút pozicionálási pontosságra van szükség, több leállási pozícióra van szükség a löket mentén, más tengelyekkel való szinkronizált mozgás kritikus fontosságú, a nagy sebességű pont-pont közötti mozgások optimalizált sebességprofilokat igényelnek, vagy az alkalmazás felvétel, elhelyezés, válogatás vagy precíz anyagátvitelhez kapcsolódik. A pozícióvezérlésből leginkább azok a gyártási folyamatok profitálnak, amelyek terhelésváltozásoktól függetlenül ismételhető pozíciókat igényelnek.
Pozícióvezérlés kiváló területei
Pick-and-Place műveletek
A robotikus összeszerelés és anyagmozgatáshoz olyan hengerekre van szükség, amelyek pontosan meghatározott helyekre tudnak ismétlődően mozogni:
- Több pozíciójú ütközők: Egy henger több állomást szolgál ki a lökethossza mentén.
- Szinkronizált mozgás: Koordinálja a szállítószalagokat, robotokat vagy más tengelyeket
- Nagy sebességű pontosság: 2+ m/s sebességnél is megőrzi a pontosságot
Precíziós pozicionálási alkalmazások
CNC szerszámgép betöltése: A munkadarabok a megmunkálási pontosság érdekében 0,05 mm-en belül kell igazodjanak egymáshoz.
Optikai szerelvény: A lencse pozicionálása 0,1 mm alatti ismételhetőséget igényel a fókuszminőség érdekében.
Ellenőrzési rendszerek: A kamera elhelyezése következetes helyet igényel a képelemzéshez.
Mozgásprofil optimalizálás
A pozícióvezérlés kifinomult mozgási stratégiákat tesz lehetővé:
- S-görbe gyorsulás5: A sima indítás/leállítás csökkenti a mechanikai rázkódást.
- Sebességkeverés: Mozgások közötti átmenetek megállás nélkül
- Elektronikus hajtómű: Matematikailag szinkronizálódik a fő tengellyel
- Repülő nyíró: A vágás során a mozgó szalag sebességéhez igazodik
Pozícióvezérlés előnyei
- Abszolút pontosság: Mikronos pontossággal éri el a célt
- Többpontos képesség: Korlátlan számú megállás a lökethossz mentén
- Kiszámítható időzítés: Ciklusidő konzisztencia az átviteli kapacitás tervezéséhez
- Szinkronizálás: Koordinálja a komplex többtengelyes mozgást
Tipikus specifikációk
A modern, pozícióvezérlésű, rúd nélküli intelligens hengerek a következőket biztosítják:
- Helymeghatározási pontosság: ±0,05 mm és ±0,5 mm között, az érzékelőtől függően
- Ismételhetőség: ±0,01 mm mágneses rendszer esetén
- Maximális sebesség: 2-3 m/s szabályozott lassítással
- Felbontás: 0,01 mm vagy jobb, csúcskategóriás enkóderekkel
Bepto pozícióvezérelt rúd nélküli hengereink OEM-szintű teljesítményt nyújtanak jelentősen alacsonyabb áron, és teljes mértékben kompatibilisek a főbb márkák cserélhető alkatrészeivel. Több tucat létesítménynek segítettünk az elavult rendszerek korszerűsítésében, miközben 35%-vel csökkentettük a pótalkatrészek raktárkészletének költségeit. 💰
Kombinálhatók-e mindkét vezérlési mód hibrid alkalmazásokban?
A fejlett alkalmazások gyakran megkövetelik a vezérlési módok közötti váltást a különböző ciklusfázisok során. 🔀
A hibrid erő-pozíció vezérlés lehetővé teszi az intelligens hengerek számára, hogy a gyors megközelítési mozdulatokhoz pozícióvezérlést használjanak, majd a tényleges munkavégzéshez erővezérlésre váltsanak, és a visszahúzáshoz ismét pozícióvezérlésre térjenek vissza. Ez a kombináció optimális ciklusidőt (gyors pozicionálás) és minőségbiztosítást (vezérelt erőalkalmazás) biztosít. A megvalósításhoz olyan hengerekre van szükség, amelyek nyomás- és pozícióérzékelőkkel rendelkeznek, valamint olyan vezérlőkre, amelyek 10-50 ms-on belül képesek módváltásra.

Hibrid vezérlési stratégiák
Szekvenciális üzemmód váltás
1. fázis – Gyors megközelítés (pozícióvezérlés):
- Gyorsan közelítsd meg a kontaktus pozíciót
- Nagy sebesség (1,5–2 m/s) a ciklusidő optimalizálása érdekében
- Álljon meg 2-5 mm-rel a munkadarab érintkezése előtt
2. fázis – Művelet végrehajtása (erőszabályozás):
- Váltás erővezérléses üzemmódra
- Alkalmazzon szabályozott préselési/összeszerelési erőt
- A minőség ellenőrzése a erő-elmozdulás görbe figyelemmel kísérésével
3. fázis – Visszahúzás (pozícióvezérlés):
- Visszatérés a kiindulási vagy közbenső pozícióba
- Optimalizált sebességprofil a következő ciklushoz
Valós hibrid alkalmazás
Egy minnesotai Minneapolisban működő orvostechnikai eszközgyártó pontosan ezt a stratégiát alkalmazza a katéterhegyek összeszerelésénél. A Bepto intelligens henger 0,4 másodperc alatt gyorsan pozicionálja (pozicionálási mód) az összeszerelő állomást, átvált erőmódra, hogy pontosan 18 N erőt fejtsen ki a hegy hőhegesztéséhez (0,6 másodperc), majd pozícióvezérlés alatt visszahúzódik (0,3 másodperc). Teljes ciklusidő: 1,3 másodperc, 2 millió ciklus alatt nulla hibával. 🏥
Végrehajtási követelmények
| Komponens | Specifikáció | Cél |
|---|---|---|
| Kettős érzékelők | Nyomás + Pozíció | Mindkét vezérlési módot engedélyezze |
| Gyors vezérlő | <10 ms-os üzemmódváltás | Zökkenőmentes átmenet |
| Szervó/arányos szelep | Magas frekvenciás válasz | Mindkét vezérlő típus támogatása |
| Fejlett szoftver | Állapotgép logika | Kezelés mód átmenetek |
A hibrid megközelítés előnyei
- Optimalizált ciklusidő: Gyors mozdulatok, ahol a pontosság nem kritikus
- Minőségbiztosítás: Szabályozott erő ott, ahol számít
- Folyamatfigyelés: Mind a pozíció, mind az erő adatai rögzítve
- Rugalmasság: Automatikus alkalmazkodás a termékváltozatokhoz
Döntési keretrendszer
Erőszabályozást használjon, amikor:
- A rész vastagsága/magassága >0,5 mm-rel változik
- Az anyag tulajdonságai nem konzisztensek
- Túlzott erő alkalmazása károsodást okozhat
- A folyamat minősége az erőhatástól függ
Használja a pozícióvezérlést, ha:
- Az abszolút helymeghatározás pontossága kritikus fontosságú
- Több leállási pozícióra van szükség
- Szinkronizálás más berendezésekkel szükséges
- A ciklusidő optimalizálása nagy sebességet igényel
Hibrid vezérlést használjon, ha:
- Az alkalmazásnak különálló pozicionálási és működési fázisai vannak.
- A sebesség és a minőség egyaránt kritikus fontosságú
- A folyamatfigyeléshez mind az erő, mind a pozíció adataira szükség van.
- A költségvetés lehetővé teszi a fejlett intelligens hengerrendszerek bevezetését
Következtetés
Az erővezérlés és a pozícióvezérlés módok közötti választás – vagy hibrid stratégiák alkalmazása – közvetlenül befolyásolja a termék minőségét, a ciklus hatékonyságát és a folyamat képességeit, így ez az alapvető döntés az egyik legfontosabb a modern gyártás pneumatikus rendszerének tervezésében. 🚀
Gyakran ismételt kérdések az intelligens hengervezérlési módokról
K: Fel lehet szerelni a meglévő hengereimet erő- vagy pozícióvezérléssel?
Az utólagos felszerelés a henger jelenlegi kialakításától függ. A standard hengerek külső pozícióérzékelőkkel (mágnescsíkok, húzóhuzalos kódolók) bővíthetők a pozícióvezérléshez, de az erővezérléshez nyomásérzékelők szükségesek a henger nyílásaiban, valamint arányos szelepvezérlés. A teljes utólagos felszerelés költsége általában az új intelligens henger árának 60-80%-a, ezért a csere gyakran gazdaságosabb megoldás. A Bepto költséghatékony, intelligens, rúd nélküli hengercseréket kínál, amelyek kompatibilisek a főbb OEM szerelési interfészekkel.
K: Mennyire függ az erőszabályozás pontossága a légnyomás stabilitásától?
Az erőszabályozás pontossága közvetlenül arányos az ellátási nyomás stabilitásával, mivel F = P × A. 6 bar ellátási nyomás mellett ±0,2 bar nyomásingadozás ±3,31 TP3T erőváltozást okoz. ±11 TP3T erőpontosságot igénylő kritikus alkalmazásokhoz használjon ±0,05 bar stabilitású nyomásszabályozókat, és fontolja meg a zárt hurkú nyomásszabályozás alkalmazását. A pozíciószabályozás kevésbé érzékeny a nyomásváltozásokra, mivel a szelep pozícióját a nyomástól függetlenül állítja be a célpozíció eléréséhez.
K: Milyen válaszidőre számíthatok a vezérlési módok közötti váltáskor?
A modern intelligens hengervezérlők a rendszer felépítésétől függően 10–50 ms alatt váltanak üzemmódokat. A tényleges fizikai reakció (a henger mozgásának változása) további 20–100 ms-ot vesz igénybe, a szelep reakcióidejétől és a pneumatikus rendszer dinamikájától függően. Gyakori üzemmódváltást igénylő alkalmazások esetén (másodpercenként több mint 5-ször) győződjön meg arról, hogy a vezérlő és a szelepek nagyfrekvenciás működésre vannak-e méretezve, hogy elkerülje a teljesítmény romlását.
K: Az erővezérelt hengerek több levegőt fogyasztanak, mint a pozícióvezérelt hengerek?
Az erőszabályozás általában 10-20% több levegőt fogyaszt, mert folyamatosan modulálja a nyomást a célerő fenntartása érdekében, míg a pozíciószabályozás teljes nyomást használ a mozgásokhoz, majd minimális áramlással tartja a pozíciót. Az erőszabályozás azonban megakadályozza a túlnyomás okozta energia pazarlást, ami ellensúlyozhatja ezt a különbséget. A tényleges fogyasztás nagymértékben függ az alkalmazás üzemi ciklusától – forduljon Bepto mérnöki csapatunkhoz a folyamat paraméterei alapján történő konkrét számításokért.
K: Egy intelligens henger képes kezelni mind a húzó-, mind a nyomóerő-szabályozást?
Igen, a mindkét kamrában nyomásérzékelőkkel ellátott fejlett intelligens hengerek mindkét irányban szabályozhatják az erőt. Ehhez kettős nyomásérzékelők és kétirányú erőszámítás szükséges (F = P₁×A₁ – P₂×A₂, figyelembe véve a rúd területének különbségeit). Az anyagvizsgálat, a szövetfeszesség-szabályozás és a kétirányú összeszereléshez hasonló alkalmazások előnyösnek tartják ezt a képességet. A szabványos megvalósítások általában csak egy irányban (általában nyomás irányában) szabályozzák az erőt, hogy csökkentsék a költségeket és a bonyolultságot.
-
Útmutató, amely elmagyarázza, hogyan alakítják a lineáris enkóderek a mechanikus mozgást elektromos jelekké a pontos pozicionálás érdekében. ↩
-
Áttekintés arról, hogyan szabályozzák a proporcionális és szervo szelepek az áramlást és a nyomást a folyadék-meghajtású rendszerekben. ↩
-
Műszaki forrás az erő-elmozdulás görbék értelmezéséről az anyagok tulajdonságainak és mechanikai viselkedésének elemzése céljából. ↩
-
Mérnöki útmutató a tűréshalmozódás elemzéséről és annak hatására az összeszerelés illeszkedésére és működésére. ↩
-
A mozgásprofilok összehasonlítása, amely elmagyarázza, hogy az S-görbe gyorsulás hogyan csökkenti a mechanikai rezgést és a rángatásokat. ↩
