

Pendahuluan
Apakah jalur otomatisasi berkecepatan tinggi Anda sering melewati posisi target dan membuang waktu siklus yang berharga? 🎯 Ketika slide pneumatik melewati posisi yang dimaksud atau membutuhkan waktu terlalu lama untuk stabil, produktivitas produksi menurun, akurasi penempatan memburuk, dan keausan mekanis meningkat. Masalah kinerja dinamis ini mengganggu operasi manufaktur di seluruh dunia setiap hari.
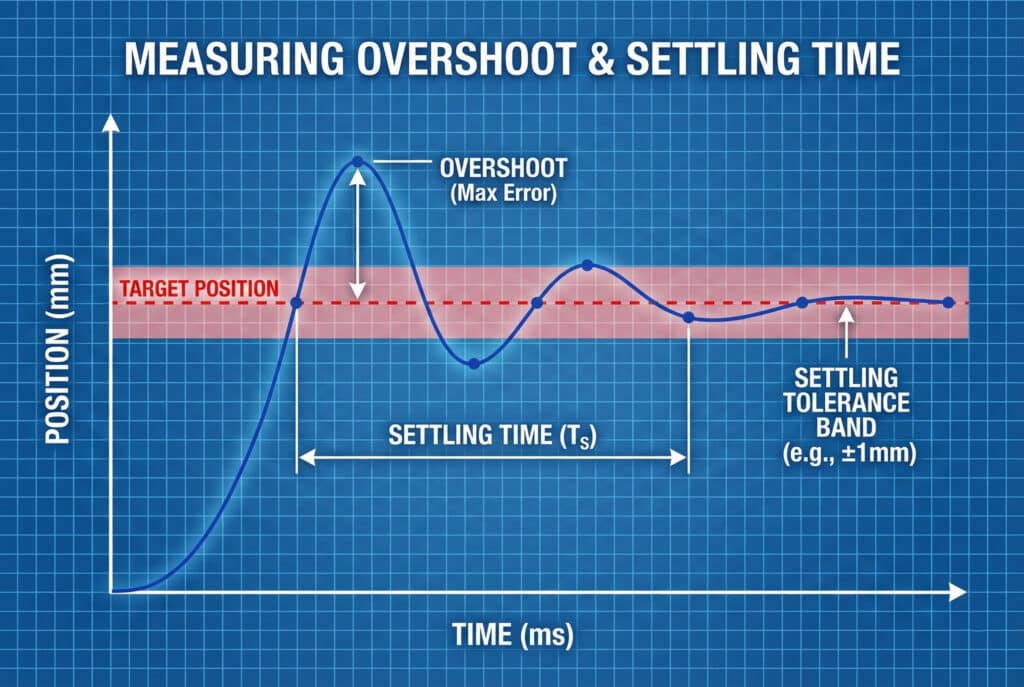
Overshoot pada slide pneumatik terjadi ketika kereta melaju melampaui posisi targetnya sebelum stabil, sementara waktu stabilisasi mengukur berapa lama sistem membutuhkan waktu untuk mencapai dan mempertahankan posisi stabil dalam batas toleransi yang dapat diterima. Kecepatan tinggi yang umum silinder tanpa batang1 Sistem mengalami overshoot sebesar 5-15 mm dan waktu penyelesaian 50-200 ms, tetapi dengan bantalan yang tepat, optimasi tekanan, dan strategi pengendalian yang tepat, hal ini dapat dikurangi hingga 60-80%.
Baru-baru ini, saya bekerja sama dengan Marcus, seorang insinyur otomatisasi senior di fasilitas pengemasan semikonduktor di Austin, Texas. Sistem pick-and-place miliknya mengalami overshoot 12mm di akhir setiap stroke 800mm, yang menyebabkan kesalahan penempatan dan memperlambat waktu siklus sebesar 0,3 detik per bagian. Setelah kami menganalisis konfigurasi silinder tanpa batang Bepto-nya dan mengoptimalkan parameter peredamannya, overshoot berkurang menjadi 3mm dan waktu penyelesaian meningkat sebesar 65%. Mari saya bagikan pendekatan analitis yang menghasilkan hasil ini. 📊
Daftar Isi
- Apa yang Menyebabkan Overshoot dan Waktu Penyesuaian yang Panjang pada Slides Pneumatik?
- Bagaimana cara mengukur dan mengkuantifikasi metrik kinerja dinamis?
- Solusi Teknik Apa yang Dapat Mengurangi Overshoot dan Meningkatkan Waktu Stabilisasi?
- Bagaimana Massa dan Kecepatan Beban Mempengaruhi Dinamika Sistem?
Apa yang Menyebabkan Overshoot dan Waktu Penyesuaian yang Panjang pada Slides Pneumatik?
Memahami akar penyebab masalah kinerja dinamis adalah langkah pertama menuju optimasi. 🔍
Overshoot dan waktu penyelesaian yang buruk disebabkan oleh empat faktor utama: energi kinetik berlebihan pada akhir stroke yang melebihi kapasitas peredam, peredam pneumatik atau peredam getaran mekanik yang tidak memadai, udara yang dapat dikompresi bertindak sebagai pegas yang menyebabkan getaran, dan kapasitas yang tidak memadai. peredaman2 Dalam sistem untuk menyalurkan energi dengan cepat. Interaksi antara massa yang bergerak, kecepatan, dan jarak pengereman menentukan kinerja akhir.
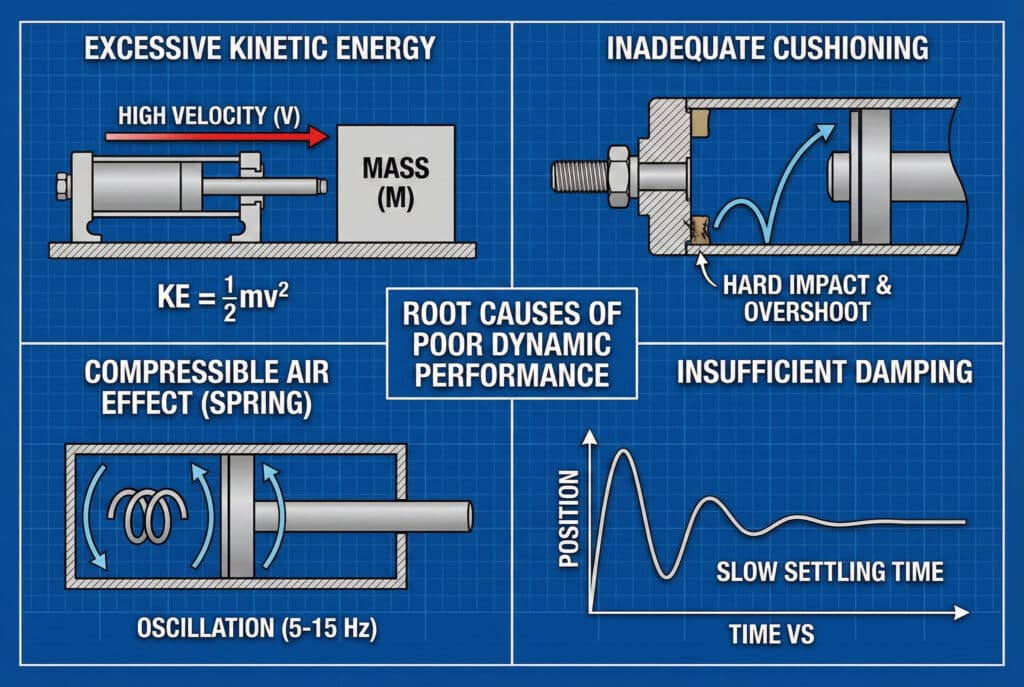
Fisika Deselerasi Pneumatik
Ketika sebuah slide pneumatik berkecepatan tinggi mendekati posisi akhir, energi kinetik harus diserap dan diredam. Persamaan energi memberitahu kita:
$$
Energi Kinetik
= \frac{1}{2} \times Massa \times Kecepatan^{2}
$$
Energi ini harus diserap dalam jarak pengereman yang tersedia. Masalah timbul ketika:
- Kecepatan terlalu tinggiEnergi meningkat sebanding dengan kuadrat kecepatan.
- Massa berlebihanBeban yang lebih berat memiliki momentum yang lebih besar.
- Peredaman tidak memadaiKapasitas penyerapan yang tidak memadai
- Redaman burukEnergi diubah menjadi getaran daripada panas.
Kekurangan Sistem yang Umum
| Masalah | Gejala | Penyebab Umum |
|---|---|---|
| Dampak Keras | Ledakan keras, tanpa overshoot | Tidak ada bantalan yang terpasang |
| Kelebihan Overshoot | Lebih dari 10 mm melebihi target | Bantalan terlalu lembut atau aus |
| Osilasi | Bertahan beberapa kali | Damping yang tidak memadai |
| Penurunan Lambat | >200 milidetik stabilisasi | Terlalu teredam atau tekanan rendah |
Di Bepto, kami telah menganalisis ratusan aplikasi silinder tanpa batang berkecepatan tinggi. Masalah yang paling umum? Insinyur memilih sistem peredam berdasarkan rekomendasi katalog tanpa memperhitungkan kondisi kecepatan dan beban spesifik mereka.
Efek Kompresibilitas Udara
Berbeda dengan sistem hidraulik, sistem pneumatik harus menghadapi sifat kompresibilitas udara. Saat bantalan teraktivasi, udara terkompresi bertindak sebagai pegas, menyimpan energi yang dapat menyebabkan rebound. Hubungan tekanan-volume menciptakan frekuensi osilasi alami yang umumnya berkisar antara 5-15 Hz pada sistem silinder tanpa batang.
Bagaimana cara mengukur dan mengkuantifikasi metrik kinerja dinamis?
Pengukuran yang akurat sangat penting untuk perbaikan sistematis dan validasi. 📏
Untuk mengukur overshoot dan waktu penyelesaian dengan tepat, Anda memerlukan: sensor posisi beresolusi tinggi (minimal 0,1 mm resolusi), pengambilan data dengan laju sampling 1 kHz atau lebih tinggi, definisi yang jelas tentang toleransi penyelesaian (biasanya ±0,5 mm hingga ±2 mm), dan beberapa kali pengujian di bawah kondisi yang konsisten. Overshoot diukur sebagai kesalahan posisi maksimum di luar target, sementara waktu penyelesaian adalah saat sistem masuk dan tetap berada dalam rentang toleransi.
Peralatan Pengukuran dan Pengaturan
Instrumen Esensial
- Penyandi linier3Magnetik atau optik, resolusi 0,01-0,1 mm
- Sensor perpindahan laser: Tanpa kontak, waktu respons mikrodetik
- Sensor kabel tarikEfisien biaya untuk gerakan yang lebih panjang
- Sistem akuisisi dataPenghitung kecepatan tinggi PLC atau sistem akuisisi data (DAQ) khusus
Indikator Kinerja Utama
Kelebihan (OS)Posisi maksimum melebihi target
- Rumus: OS = (Posisi Puncak – Posisi Target)
- Rentang yang dapat diterima: 2-5 mm untuk sebagian besar aplikasi industri.
- Aplikasi kritis: <1 mm
Waktu Penyelesaian (Ts)Waktu yang dibutuhkan untuk mencapai dan tetap berada dalam batas toleransi.
- Diukur dari awal perlambatan hingga posisi stabil akhir
- Standar industri: Dalam ±2% dari panjang stroke
- Target kinerja tinggi: <100 milidetik untuk stroke 500 mm
Perlambatan PuncakPercepatan negatif maksimum selama pengereman
- Diukur dalam g-force (1g = 9,81 m/s²)
- Rentang tipikal: 2-5 gram untuk peralatan industri
- Nilai yang berlebihan (>8g) menunjukkan adanya potensi kerusakan mekanis.
Pedoman Praktik Terbaik untuk Protokol Uji Coba
Jennifer, seorang insinyur kualitas di pabrik alat medis di Boston, Massachusetts, mengalami kesulitan dengan posisi yang tidak konsisten di jalur perakitan. Ketika kami membantunya menerapkan protokol pengukuran terstruktur—melakukan 50 siklus pengujian pada masing-masing dari tiga kecepatan dengan analisis statistik—ia menemukan bahwa fluktuasi suhu sepanjang hari mempengaruhi kinerja bantalan sebesar 40%. Dengan data ini, kami menentukan bantalan yang dikompensasi suhu untuk menjaga kinerja yang konsisten. 🌡️
Solusi Teknik Apa yang Dapat Mengurangi Overshoot dan Meningkatkan Waktu Stabilisasi?
Terdapat beberapa strategi yang telah teruji untuk mengoptimalkan kinerja dinamis secara sistematis. ⚙️
Lima solusi utama meningkatkan kinerja penyelesaian: bantalan pneumatik yang dapat disesuaikan (paling efektif, mengurangi overshoot 50-70%), peredam kejut eksternal (menambah penyerapan energi 30-50%), tekanan pasokan yang dioptimalkan (mengurangi energi kinetik 20-30%), profil deselerasi yang dikendalikan menggunakan katup servo atau Kontrol PWM4 (memungkinkan pendaratan yang lembut), dan penyesuaian ukuran sistem yang tepat (menyesuaikan diameter silinder dan langkah dengan aplikasi). Menggabungkan beberapa pendekatan menghasilkan hasil terbaik.
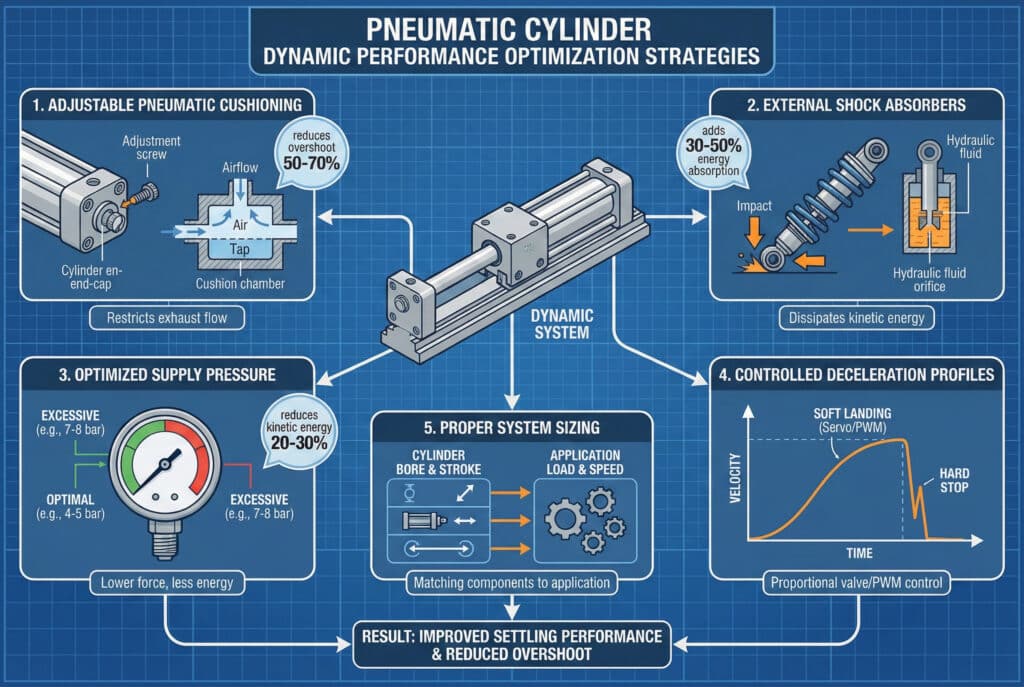
Optimasi Peredam Udara
Silinder tanpa batang modern dilengkapi dengan sistem peredam yang dapat disesuaikan, yang membatasi aliran udara buang selama 10-30 mm terakhir pergerakan. Penyesuaian yang tepat sangat penting:
Prosedur Penyesuaian Bantalan
- Mulai dalam keadaan tertutup sepenuhnya: Batasan maksimum
- Jalankan siklus pengujian: Amati overshoot dan penyelesaian
- Buka 1/4 putaranKurangi pembatasan sedikit.
- Pengujian ulangTemukan keseimbangan optimal
- Pengaturan dokumen: Putaran maksimum dari posisi tertutup
Target: Overshoot minimal (2-3 mm) dengan waktu penyelesaian tercepat (<100 ms)
Pemilihan Peredam Getaran Eksternal
Ketika bantalan bawaan terbukti tidak cukup, peredam kejut eksternal menyediakan penyerapan energi tambahan:
| Jenis Peredam Kejut | Kapasitas Energi | Penyesuaian | Biaya | Aplikasi Terbaik |
|---|---|---|---|---|
| Penyesuaian Otomatis | Sedang | Otomatis | Tinggi | Beban variabel |
| Orifice yang dapat disesuaikan | Sedang-Tinggi | Manual | Sedang | Beban tetap |
| Industri Berat | Sangat Tinggi | Manual | Sangat Tinggi | Kondisi ekstrem |
| Bantalan Elastomer | Rendah | Tidak ada | Rendah | Cadangan beban ringan |
Strategi Pengendalian Lanjutan
Untuk aplikasi yang memerlukan kinerja luar biasa, pertimbangkan:
- Katup proporsional5 pengendalianPenurunan tekanan secara bertahap selama pendekatan
- Profil perlambatan PWMPengendalian digital terhadap karakteristik penghentian
- Siklus umpan balik posisiPenyesuaian secara real-time berdasarkan posisi aktual
- Penginderaan tekananPengendalian adaptif berdasarkan kondisi beban
Tim teknik Bepto kami membantu pelanggan mengimplementasikan solusi ini dengan pengganti silinder tanpa batang yang kompatibel, seringkali mencapai kinerja yang setara atau melebihi spesifikasi OEM dengan biaya 30-40% lebih rendah.
Bagaimana Massa dan Kecepatan Beban Mempengaruhi Dinamika Sistem?
Hubungan antara massa, kecepatan, dan kinerja dinamis mengikuti prinsip-prinsip teknik yang dapat diprediksi. 📐
Massa dan kecepatan beban memiliki efek eksponensial terhadap overshoot dan waktu penyelesaian: menggandakan kecepatan akan menggandakan energi kinetik empat kali lipat, sehingga memerlukan kapasitas peredam empat kali lipat, sementara menggandakan massa akan menggandakan energi secara linier. Parameter kritisnya adalah momentum (massa × kecepatan), yang menentukan tingkat keparahan benturan. Sistem yang beroperasi di atas 2 m/s dengan beban melebihi 50 kg memerlukan perancangan yang cermat untuk mencapai kinerja penyelesaian yang memadai.
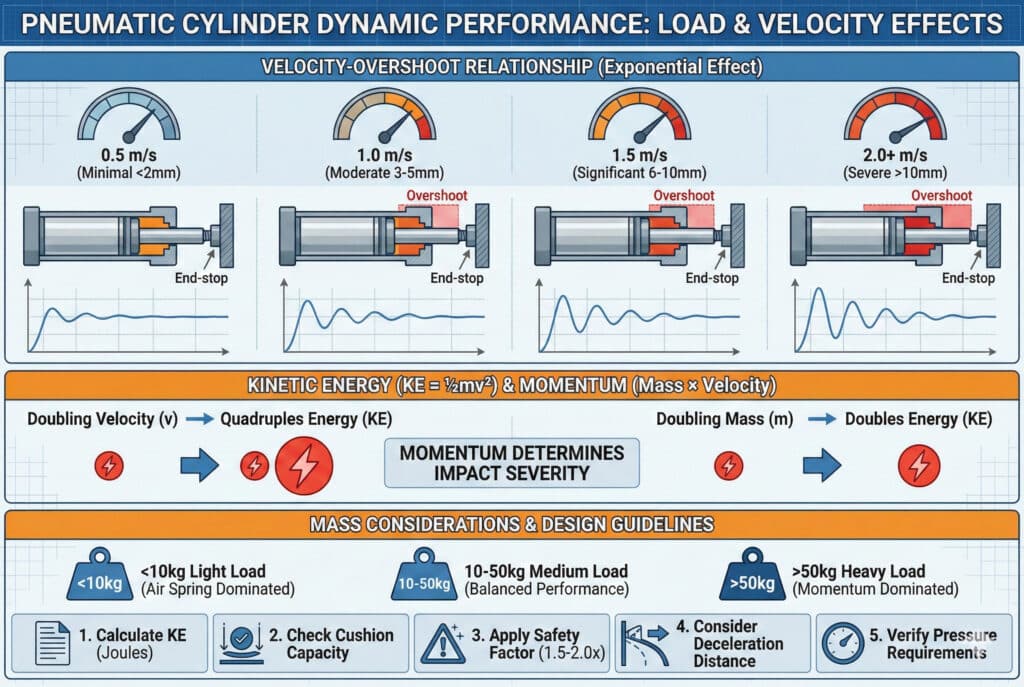
Hubungan Kecepatan-Kelebihan
Data pengujian dari ribuan instalasi menunjukkan:
- 0,5 m/s: Overshoot minimal (<2 mm), penyelesaian yang sangat baik
- 1,0 m/s: Kelebihan moderat (3-5 mm), penyelesaian yang baik dengan bantalan yang tepat.
- 1,5 m/s: Kelebihan yang signifikan (6-10 mm), memerlukan optimasi.
- 2,0+ m/s: Kelebihan yang parah (>10 mm), memerlukan solusi canggih.
Pertimbangan Massal
Muatan ringan (<10 kg)Efek peredam udara mendominasi, mungkin terjadi getaran.
Muatan sedang (10-50 kg)Kinerja seimbang, bantalan standar yang memadai
Muatan berat (>50 kg)Momentum mendominasi, peredam kejut eksternal seringkali diperlukan.
Pedoman Desain Praktis
Saat menentukan selongsong pneumatik untuk aplikasi kecepatan tinggi:
- Hitung energi kinetikKE = ½mv² dalam joule
- Periksa kapasitas peredamSpesifikasi pabrikan dalam joule
- Terapkan faktor keamanan1,5-2,0 kali untuk keandalan
- Pertimbangkan jarak pengeremanBantalan yang lebih panjang = pengereman yang lebih halus
- Verifikasi persyaratan tekananTekanan yang lebih tinggi meningkatkan efektivitas peredaman.
Di Bepto, kami menyediakan spesifikasi teknis terperinci untuk semua model silinder tanpa batang kami, termasuk kurva kapasitas peredaman pada berbagai tekanan dan kecepatan. Data ini memungkinkan insinyur untuk membuat keputusan yang terinformasi daripada menebak-nebak dalam pemilihan komponen. 💪
Kesimpulan
Analisis sistematis dan optimasi waktu overshoot dan waktu penyelesaian pada slide pneumatik berkecepatan tinggi menghasilkan peningkatan yang terukur dalam waktu siklus, akurasi penempatan, dan umur pakai peralatan—mengubah kinerja yang dapat diterima menjadi keunggulan kompetitif melalui prinsip-prinsip teknik dan solusi yang teruji. 🚀
Pertanyaan Umum tentang Kinerja Dinamis Katup Pneumatik
Q: Apa nilai overshoot yang dapat diterima untuk slide pneumatik industri?
Untuk sebagian besar aplikasi industri, overshoot antara 2-5 mm dianggap dapat diterima dan menunjukkan penyetelan bantalan yang baik. Aplikasi presisi seperti perakitan elektronik atau manufaktur perangkat medis mungkin memerlukan overshoot kurang dari 1 mm, sementara penanganan material yang kurang kritis dapat mentolerir overshoot 5-10 mm. Kunci utamanya adalah konsistensi—overshoot yang dapat diulang dapat dikompensasi dalam pemrograman, tetapi variasi acak dapat menyebabkan masalah kualitas.
T: Bagaimana saya tahu jika bantalan saya sudah disesuaikan dengan benar?
Penyesuaian bantalan yang tepat menghasilkan suara “whoosh” yang lembut daripada bunyi benturan logam yang keras, getaran minimal yang terlihat pada akhir stroke, dan posisi berhenti yang konsisten dalam rentang ±2mm pada beberapa siklus. Jika Anda mendengar bunyi benturan yang keras, melihat getaran berlebihan, atau mengalami variasi posisi lebih dari 5mm, bantalan Anda memerlukan penyesuaian atau sistem Anda memerlukan peredam kejut eksternal.
Q: Apakah saya dapat memperpendek waktu pengendapan dengan meningkatkan tekanan udara?
Ya, tetapi dengan hasil yang semakin berkurang dan potensi kerugian. Meningkatkan tekanan dari 6 bar menjadi 8 bar umumnya memperbaiki waktu penyelesaian sebesar 15-25% dengan meningkatkan efektivitas peredaman dan kekakuan sistem. Namun, tekanan di atas 8 bar jarang memberikan manfaat tambahan dan justru meningkatkan konsumsi udara, laju keausan, dan tingkat kebisingan. Optimalkan penyesuaian peredaman sebelum meningkatkan tekanan.
Q: Mengapa kinerja katup pneumatik saya berbeda saat panas dibandingkan saat dingin?
Suhu memengaruhi densitas udara, gesekan segel, dan viskositas pelumas—semua hal ini berdampak pada kinerja dinamis. Sistem yang dingin (di bawah 15°C) menunjukkan peningkatan gesekan dan respons yang lebih lambat, sementara sistem yang panas (di atas 40°C) mengalami penurunan efektivitas peredaman karena densitas udara berkurang. Fluktuasi suhu sebesar 20°C dapat mengubah waktu penyelesaian sebesar 30-40%. Pertimbangkan penggunaan peredaman yang dikompensasi suhu atau kontrol lingkungan untuk aplikasi kritis.
Q: Apakah saya sebaiknya menggunakan peredam kejut eksternal atau mengandalkan peredam bawaan?
Sistem peredam pneumatik bawaan sebaiknya menjadi pilihan utama Anda—sistem ini terintegrasi, efisien secara biaya, dan cukup untuk kebanyakan aplikasi. Tambahkan peredam eksternal jika: energi kinetik melebihi kapasitas peredam (biasanya >50 joule), Anda memerlukan penyesuaian untuk beban yang bervariasi, peredam bawaan aus atau rusak, atau Anda beroperasi pada kecepatan ekstrem (>2 m/s). Tim teknis Bepto kami dapat menghitung kebutuhan energi spesifik Anda dan merekomendasikan solusi yang sesuai.
-
Memahami mekanisme dan aplikasi silinder pneumatik tanpa batang. ↩
-
Jelajahi bagaimana gaya redaman menghilangkan energi untuk mengurangi getaran mekanik. ↩
-
Tinjau prinsip kerja pengkodean linier magnetik dan optik. ↩
-
Pelajari cara Pulse Width Modulation (PWM) mengendalikan aliran pneumatik. ↩
-
Pahami fungsi katup proporsional dalam pengendalian gerakan presisi. ↩
