

Ievads
Vai jums ir grūti izvēlēties pareizo vadības stratēģiju savam viedajam pneimatiskajam cilindram? 🤔 Daudzi inženieri nevar izlemt, vai izvēlēties spēka vadības vai pozīcijas vadības režīmu, kas noved pie neoptimālas darbības, produkta bojājumiem vai neefektīviem procesiem. Nepareiza izvēle var nozīmēt atšķirību starp vienmērīgu darbību un dārgiem bojājumiem.
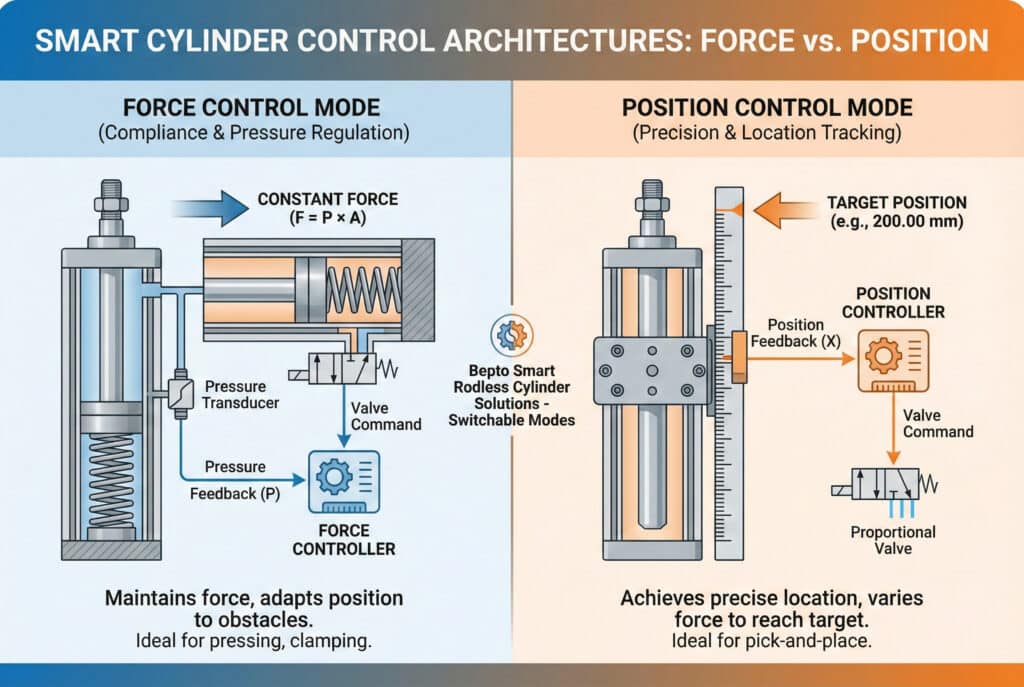
Spēka kontroles režīms regulē viedcilindra spiedienu vai spēka izvadi, lai uzturētu nemainīgu stumšanas/vilkšanas spēku neatkarīgi no pozīcijas, kas ir ideāli piemērots presēšanas, skavas un montāžas darbībām. Pozīcijas kontroles režīms koncentrējas uz precīzas pārvietošanas vietas sasniegšanu un uzturēšanu gar gājienu, kas ir ideāli piemērots uzņemšanas un novietošanas, šķirošanas un pozicionēšanas uzdevumiem. Izvēle ir atkarīga no tā, vai jūsu lietojumprogrammā prioritāte ir “cik stipri” (spēks) vai “kur tieši” (pozīcija) cilindrs darbojas.
Pagājušajā mēnesī es konsultējos ar Reičelu, procesu inženieri automobiļu montāžas rūpnīcā Klīvlandā, Ohaio štatā. Viņas komanda izmantoja pozīcijas kontroli durvju paneļu uzstādīšanas procesā, bet paneļi plīsa nepareizas spēka pielietošanas dēļ. Pēc tam, kad mēs pārslēdzām viņas Bepto viedo bezstieņa cilindru uz spēka kontroles režīmu ar spiediena atgriezenisko saiti, defektu skaits samazinājās no 8% līdz mazāk nekā 0,5%. Lai nodrošinātu veiksmīgu lietošanu, ir ļoti svarīgi saprast, kad izmantot katru režīmu. 💡
Satura rādītājs
- Kāda ir būtiskā atšķirība starp spēka un pozīcijas kontroli?
- Kad pneimatiskās sistēmās jāizmanto spēka kontroles režīms?
- Kad pozīcijas kontroles režīms ir labāka izvēle?
- Vai varat apvienot abus vadības režīmus hibrīdās lietojumprogrammās?
Kāda ir būtiskā atšķirība starp spēka un pozīcijas kontroli?
Lai pareizi piemērotu inženierijas zināšanas, ir būtiski saprast galvenās atšķirības starp šīm kontroles filozofijām. ⚙️
Spēka kontroles režīms izmanto spiediena sensorus vai strāvas uzraudzību, lai regulētu cilindru izvades spēku, uzturot nemainīgu stumšanas/vilkšanas spēku pat tad, ja mainās pozīcija vai rodas šķēršļi. Pozīcijas kontroles režīms izmanto lineārie kodētāji1 vai magnētiskos sensorus, lai precīzi izsekotu un kontrolētu ratiņu atrašanās vietu, parasti ar precizitāti no 0,01 līdz 0,5 mm, dodot priekšroku precīzai pozicionēšanai, nevis spēka vienmērīgumam. Katrs režīms optimizē dažādus veiktspējas parametrus atbilstoši lietojumprogrammas prasībām.
Kontrolēšanas cilpas pamati
Spēka kontroles arhitektūra
Spēka kontroles režīmā sistēma nepārtraukti uzrauga:
- Spiediena sensori: Mērīt kameras spiedienu reālajā laikā
- Spēka aprēķins: F = P × A (spiediens × virzuļa laukums)
- Atgriezeniskā saite: Regulē vārsta pozīciju, lai uzturētu mērķa spēku
- Atbilstība: Cilindra pozīcija mainās atkarībā no detaļas īpašībām
Kontrolierim nav svarīgi, kur atrodas cilindrs — svarīgi ir tikai tas, lai tas pielietotu pareizo spēku.
Pozīcijas kontroles arhitektūra
Pozīcijas kontroles sistēmas koncentrējas uz atrašanās vietu:
- Lineārais kodētājs: Izseko absolūto vai inkrementālo pozīciju
- Pozīcijas kļūda: Aprēķina atšķirību no mērķa
- Ātruma profilēšana: Kontrolē paātrinājumu un palēninājumu
- Spēka izmaiņas: Izvades spēks mainās atkarībā no slodzes un berzes
Galveno rādītāju salīdzinājums
| Raksturīgs | Spēka kontrole | Pozīcijas kontrole |
|---|---|---|
| Primārā atgriezeniskā saite | Spiediens/spēks | Pozīcija/atrašanās vieta |
| Tipiskā precizitāte | ±2-5% mērķa spēks | ±0,01–0,5 mm |
| Reakcija uz šķēršļiem | Saglabā spēku, apstājas kustībā | Palielina spēku, lai sasniegtu pozīciju |
| Labākais atbilstības nodrošināšanai | Lielisks | Slikts |
| Atkārtojamība | Spēks: izcils / Pozīcija: mainīga | Pozīcija: Lieliska / Spēks: Mainīgs |
| Sistēmas izmaksas | Mērens | Vidēji augsts |
Bepto piedāvā viedus cilindru risinājumus bez stieņa ar abiem vadības režīmiem, ļaujot inženieriem izvēlēties optimālo stratēģiju konkrētajai lietošanai. Mūsu sistēmas var pat pārslēgties starp režīmiem viena cikla dažādās fāzēs. 🔄
Sensoru prasības
Spēka kontroles vajadzības:
- Spiediena devēji (tipisks diapazons 0–10 bāri)
- Proporcionālie vai servo vārsti2 precīzai spiediena regulēšanai
- Ātrās vadības cilpas (1–5 ms cikla laiks)
Pozīcijas kontroles vajadzības:
- Lineārie pozīcijas sensori (magnētiskie, optiskie vai magnetostriktīvie)
- Augstas izšķirtspējas atgriezeniskā saite (0,01–0,1 mm)
- Prognozējamie kustības profili vienmērīgai paātrināšanai
Kad pneimatiskās sistēmās jāizmanto spēka kontroles režīms?
Dažām lietojumprogrammām kvalitātes un drošības nodrošināšanai ir absolūti nepieciešama spēka kontrole. 🛡️
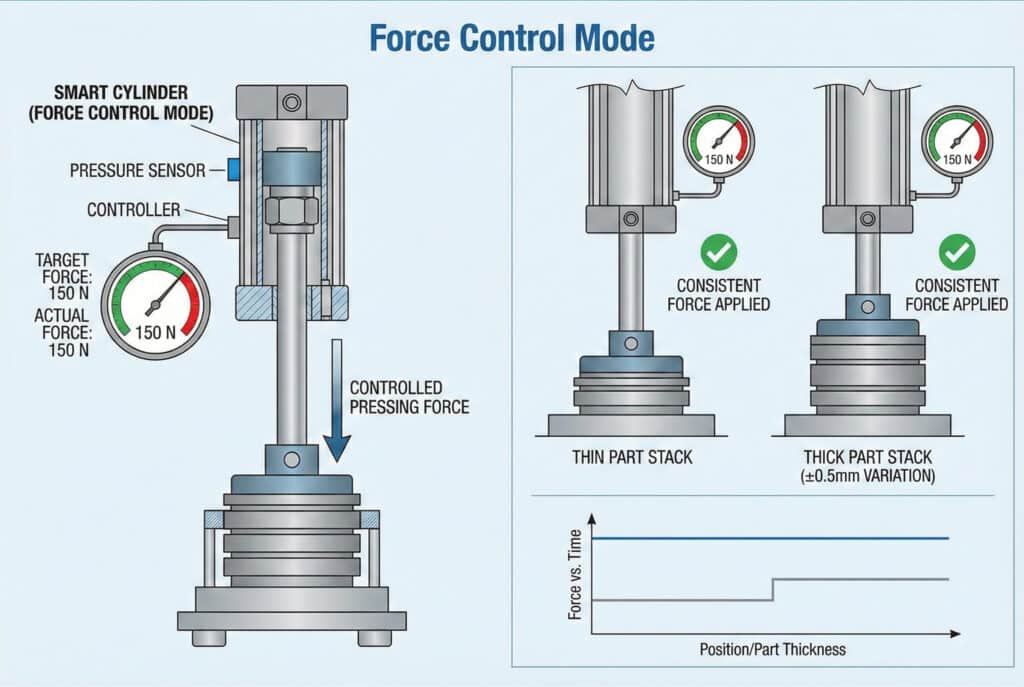
Spēka kontroles režīms ir ideāls lietojumiem, kur nepieciešams: vienmērīgs spiediens neatkarīgi no detaļas biezuma svārstībām (±0,5 mm pielaide), atbilstošas montāžas darbības, kur pārmērīgs spēks var izraisīt bojājumus, kvalitātes nodrošināšanas testēšana, kas mēra spēka-pārvietojuma līknes3, delikātu produktu apstrāde ar maigu pieskārienu un adaptīvi procesi, kur darba gabala īpašības mainās. Jebkurā lietojumā, kurā svarīgāks ir “cik grūti” nekā “kur tieši”, ir lietderīgi izmantot spēka kontroli.
Ideālas spēka kontroles lietojumi
Montāža un presēšanas darbi
Presēšanas montāža: Lai izvairītos no bojājumiem, gultņu, uzmavu vai savienotāju ievietošanai ir nepieciešama kontrolēta spēka pielietošana. Spēka kontrole nodrošina vienmērīgu ievietošanu bez pārmērīgas spiediena pielietošanas.
Snap-fit montāža: Plastmasas detaļām ir nepieciešama precīza spēka pielietošana, lai fiksētu skavas, tās nesalaužot. Spēka kontrole nodrošina “sajūtu”, kas novērš defektus.
Līmes dozēšanas spiediens: Uzturot nemainīgu spēku uz dozēšanas virzuļiem, tiek nodrošināta vienmērīga materiāla plūsma neatkarīgi no viskozitātes izmaiņām.
Reāls veiksmes stāsts
Tomass, ražošanas vadītājs patēriņa elektronikas rūpnīcā Sanhosē, Kalifornijā, saskārās ar 12% kļūdu rādītājiem viedtālruņa komponentu montāžas procesā. Viņa pozīcijas kontrolētie cilindri virzīja komponentus uz fiksētu dziļumu, bet komponentu biezuma atšķirības nozīmēja, ka dažas detaļas saņēma nepietiekamu spēku, bet citas saplīsa no pārmērīga spēka. Pēc pārejas uz Bepto spēka kontrolētiem cilindriem bez stieņiem, kas iestatīti uz 150N, viņa process automātiski pielāgojās detaļu variācijām — defektu skaits samazinājās līdz 0,8%, un cikla laiks faktiski uzlabojās par 0,2 sekundēm. 📱
Spēka kontroles priekšrocības
- Pielāgojas izmaiņām: Automātiski kompensē daļu pielaides summēšanās4
- Novērš bojājumus: Pārtrauc spēka palielināšanu, kad mērķis ir sasniegts
- Atsauksmes par kvalitāti: Force dati nodrošina procesa uzraudzības iespējas
- Saudzīga apiešanās: Ideāli piemērots trausliem materiāliem (stikls, keramika, elektronika)
Pieteikumu kategorijas
| Nozare | Tipisks pielietojums | Mērķa spēka diapazons | Galvenais ieguvums |
|---|---|---|---|
| Automobiļu nozare | Laikapstākļu sloksnes uzstādīšana | 50–200 N | Vienmērīga blīvējuma nodrošināšana bez bojājumiem |
| Elektronika | PCB komponentu ievietošana | 10–80 N | Novērš plātnes plaisāšanu |
| Iepakojums | Kartona plombēšana | 100–400 N | Pielāgojas līmeņa svārstībām |
| Medicīniskās ierīces | Katetra komplekts | 5-30N | Nodrošina integritāti bez deformācijas |
| Pārtikas pārstrāde | Produkta presēšana/formēšana | 50–500 N | Vienmērīga blīvuma kontrole |
Kad pozīcijas kontroles režīms ir labāka izvēle?
Pozīcijas kontrole dominē lietojumprogrammās, kurās ļoti svarīga ir atrašanās vietas precizitāte. 🎯
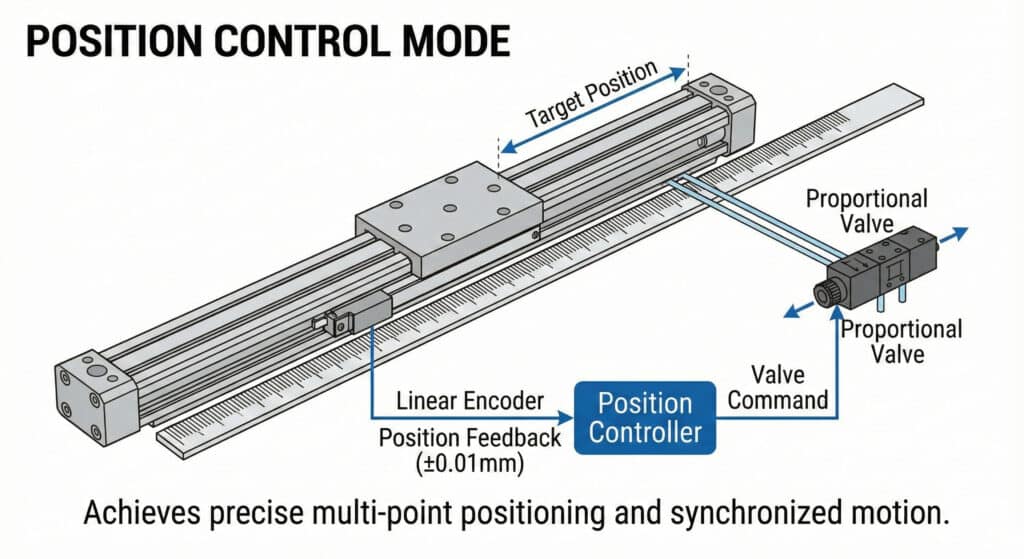
Pozīcijas kontroles režīms ir būtisks, ja: ir nepieciešama absolūta pozicionēšanas precizitāte ±0,1 mm robežās, ir nepieciešamas vairākas apstāšanās pozīcijas gar gājienu, ir svarīga sinhronizēta kustība ar citām asīm, ātrgaitas kustības no punkta uz punktu prasa optimizētus ātruma profilus vai lietojumprogramma ietver savākšanu, novietošanu, šķirošanu vai precīzu materiālu pārvietošanu. Ražošanas procesi, kuros nepieciešamas atkārtojamas pozīcijas neatkarīgi no slodzes svārstībām, visvairāk gūst labumu no pozīcijas kontroles.
Pozīcijas kontroles izcilības jomas
Pick-and-Place operācijas
Robotu montāžai un materiālu pārvietošanai nepieciešami cilindri, kas atkārtoti pārvietojas uz precīzām vietām:
- Daudzpozīciju apturēšanas ierīces: Viens cilindrs apkalpo vairākas stacijas visā tā darba ciklā.
- Sinhronizēta kustība: Koordinē ar konveijeriem, robotiem vai citām asīm
- Augsta ātruma precizitāte: Saglabā precizitāti pat pie ātruma 2+ m/s
Precīzās pozicionēšanas lietojumprogrammas
CNC darbgaldu iekraušana: Darba gabaliem jābūt izvietotiem ar precizitāti līdz 0,05 mm, lai nodrošinātu apstrādes precizitāti.
Optiskais mezgls: Objektīva pozicionēšanai nepieciešama atkārtojamība, kas ir mazāka par 0,1 mm, lai nodrošinātu fokusa kvalitāti.
Pārbaudes sistēmas: Kameras novietojumam ir nepieciešama nemainīga atrašanās vieta attēla analīzei.
Kustības profila optimizācija
Pozīcijas kontrole nodrošina sarežģītas kustības stratēģijas:
- S-līknes paātrinājums5: Vienmērīga iedarbināšana/apstādināšana samazina mehānisko triecienu
- Ātruma sajaukšana: Pārejas starp kustībām bez apstāšanās
- Elektroniskā pārnesumkārba: Sinhronizējas ar galveno asi matemātiski
- Lidojošais griezējs: Atbilst kustīgā tīmekļa ātrumam griešanas laikā
Pozīcijas kontroles priekšrocības
- Absolūta precizitāte: Sasniedz mērķi mikronu robežās
- Daudzpunktu funkcionalitāte: Neierobežots apstāšanās skaits garuma garumā
- Paredzams laiks: Cikla laika konsekvence caurlaidspējas plānošanai
- Sinhronizācija: Koordinē sarežģītu daudzass virzienu kustību
Tipiskās specifikācijas
Modernie viedie cilindri bez stieņa ar pozīcijas kontroli nodrošina:
- Pozicionēšanas precizitāte: ±0,05 mm līdz ±0,5 mm atkarībā no sensora
- Atkārtojamība: ±0,01 mm magnētostriktīvām sistēmām
- Maksimālais ātrums: 2–3 m/s ar kontrolētu palēnināšanu
- Rezolūcija: 0,01 mm vai labāks ar augstas klases kodētājiem
Mūsu Bepto pozīcijas kontrolējamie cilindri bez stieņa nodrošina OEM līdzvērtīgu veiktspēju par ievērojami zemākām izmaksām, pilnībā saderīgi ar galveno zīmolu produktu nomaiņu. Mēs esam palīdzējuši desmitiem uzņēmumu modernizēt novecojušas sistēmas, vienlaikus samazinot rezerves daļu krājumu izmaksas par 35%. 💰
Vai varat apvienot abus vadības režīmus hibrīdās lietojumprogrammās?
Uzlabotās lietojumprogrammas bieži prasa pārslēgties starp vadības režīmiem dažādu ciklu fāžu laikā. 🔀
Hibrīda spēka-pozīcijas kontrole ļauj viedajiem cilindriem izmantot pozīcijas kontroli ātrai pieejai, pēc tam pārslēgties uz spēka kontroli faktiskajai darbībai un atgriezties pie pozīcijas kontroles atkāpšanās laikā. Šī kombinācija nodrošina optimālu cikla laiku (ātra pozicionēšana) ar kvalitātes nodrošinājumu (kontrolēta spēka pielietošana). Īstenošanai nepieciešami cilindri ar spiediena un pozīcijas sensoriem, kā arī kontrolieri, kas spēj pārslēgties starp režīmiem 10–50 ms laikā.

Hibrīda vadības stratēģijas
Secīga režīma pārslēgšana
1. posms – ātra pieeja (pozīcijas kontrole):
- Ātri pārvietojieties uz gandrīz kontakta pozīciju
- Augsta ātruma (1,5–2 m/s) cikla laika optimizācija
- Apstāties 2–5 mm pirms saskares ar detaļu
2. posms – Darba operācija (spēka kontrole):
- Pāriet uz piespiedu kontroles režīmu
- Piemērojiet kontrolētu presēšanas/montāžas spēku
- Kvalitātes kontrole, izmantojot spēka-pārvietojuma līkni
3. fāze – atkāpšanās (pozīcijas kontrole):
- Atgriezties sākuma vai starpposma pozīcijā
- Optimizēts ātruma profils nākamajam ciklam
Reāla hibrīda lietojumprogramma
Medicīnisko ierīču ražotājs Mineapolē, Minesotā, izmanto tieši šo stratēģiju katetra gala montāžai. Bepto viedais cilindrs 0,4 sekundēs ātri pozicionējas (pozicionēšanas režīms) montāžas stacijā, pārslēdzas uz spēka režīmu, lai precīzi piemērotu 18 N spēku gala termiskai fiksēšanai (0,6 sekundes), pēc tam atkāpjas pozicionēšanas kontroles režīmā (0,3 sekundes). Kopējais cikla laiks: 1,3 sekundes bez defektiem vairāk nekā 2 miljonos ciklu. 🏥
Īstenošanas prasības
| Sastāvdaļa | Specifikācija | Mērķis |
|---|---|---|
| Divkāršie sensori | Spiediens + pozīcija | Iespējot abus vadības režīmus |
| Ātrs kontrolieris | <10 ms režīma pārslēgšana | Vienmērīga pāreja |
| Servo/proporcionālais vārsts | Augstas frekvences reakcija | Atbalsta abus kontroles veidus |
| Uzlabota programmatūra | Valsts mašīnas loģika | Pārvalda režīmu pārejas |
Hibrīda pieejas priekšrocības
- Optimizēts cikla laiks: Ātri kustības, kur precizitāte nav izšķiroša
- Kvalitātes nodrošināšana: Kontrolēta spēka pielietošana tur, kur tas ir nepieciešams
- Procesu uzraudzība: Reģistrēti gan pozīcijas, gan spēka dati
- Elastība: Automātiski pielāgoties produktu variācijām
Lēmumu pieņemšanas sistēma
Izmantojiet spēka kontroli, ja:
- Detalja biezums/augstums svārstās >0,5 mm
- Materiāla īpašības ir nekonsekventas
- Pārmērīgas spēka pielietošanas rezultātā var rasties bojājumi
- Procesa kvalitāte ir atkarīga no spēka pielietošanas
Izmantojiet pozīcijas kontroli, ja:
- Absolūta atrašanās vietas precizitāte ir ļoti svarīga
- Ir nepieciešamas vairākas apstāšanās pozīcijas
- Nepieciešama sinhronizācija ar citu aprīkojumu
- Cikla laika optimizācija prasa augstu ātrumu
Hibrīda vadību izmantojiet, ja:
- Pieteikumam ir atšķirīgas pozicionēšanas un darba fāzes
- Gan ātrums, gan kvalitāte ir ļoti svarīgi
- Procesa uzraudzība prasa gan spēka, gan pozīcijas datus
- Budžets ļauj izmantot modernas viedās cilindru sistēmas
Secinājums
Izvēle starp spēka kontroles un pozīcijas kontroles režīmiem — vai hibrīdu stratēģiju īstenošana — tieši ietekmē produkta kvalitāti, cikla efektivitāti un procesa iespējas, padarot šo fundamentālo lēmumu par vienu no svarīgākajiem pneimatisko sistēmu projektēšanā mūsdienu ražošanā. 🚀
FAQ par viedo cilindru vadības režīmiem
J: Vai es varu pārbūvēt savus esošos cilindrus, lai pievienotu spēka vai pozīcijas kontroli?
Pārbūve ir atkarīga no jūsu pašreizējā cilindru dizaina. Standarta cilindrus var modernizēt ar ārējiem pozīcijas sensoriem (magnētiskās joslas, stieples kodētāji) pozīcijas kontrolei, bet spēka kontrolei nepieciešami spiediena devēji cilindru portos un proporcionāla vārstu kontrole. Pilnīgas modernizācijas izmaksas parasti ir 60–80 % no jauna viedcilindra cenas, tāpēc bieži vien ekonomiski izdevīgāk ir veikt nomaiņu. Bepto piedāvā rentablus viedcilindru bezstieņu nomaiņas risinājumus, kas ir saderīgi ar galvenajām OEM montāžas saskarnēm.
J: Cik lielā mērā spēka kontroles precizitāte ir atkarīga no gaisa spiediena stabilitātes?
Spēka kontroles precizitāte ir tieši proporcionāla piegādes spiediena stabilitātei, jo F = P × A. Spiediena svārstības ±0,2 bar pie 6 bar piegādes spiediena izraisa spēka svārstības ±3,3%. Kritiskām lietojumprogrammām, kurām nepieciešama spēka precizitāte ±1%, izmantojiet spiediena regulatorus ar stabilitāti ±0,05 bar un apsveriet slēgtas cilpas spiediena kontroli. Pozīcijas kontrole ir mazāk jutīga pret spiediena svārstībām, jo tā regulē vārsta pozīciju, lai sasniegtu mērķa atrašanās vietu neatkarīgi no spiediena.
J: Kāds ir reakcijas laiks, pārslēdzoties starp vadības režīmiem?
Mūsdienu viedie cilindru kontrolieri maina režīmus 10–50 ms laikā atkarībā no sistēmas arhitektūras. Faktiskā fiziskā reakcija (cilindra kustības izmaiņas) aizņem papildu 20–100 ms atkarībā no vārsta reakcijas laika un pneimatiskās sistēmas dinamikas. Lietojumiem, kas prasa biežu režīmu maiņu (>5 reizes sekundē), pārliecinieties, ka jūsu kontrolieris un vārsti ir paredzēti darbībai ar augstu frekvenci, lai izvairītos no veiktspējas pasliktināšanās.
J: Vai spēka vadāmie cilindri patērē vairāk gaisa nekā pozīcijas vadāmie cilindri?
Spēka kontrole parasti patērē par 10–20% vairāk gaisa, jo tā nepārtraukti modulē spiedienu, lai uzturētu mērķa spēku, savukārt pozīcijas kontrole izmanto pilnu spiedienu kustībām, pēc tam uzturot pozīciju ar minimālu plūsmu. Tomēr spēka kontrole novērš enerģijas izšķiešanu, kas rodas no pārspiediena, kas var kompensēt šo atšķirību. Faktiskais patēriņš lielā mērā ir atkarīgs no lietojuma darba cikla — konsultējieties ar mūsu Bepto inženieru komandu, lai saņemtu konkrētus aprēķinus, pamatojoties uz jūsu procesa parametriem.
J: Vai viens viedais cilindrs var kontrolēt gan stiepes (vilkšanas), gan spiedes (spiešanas) spēku?
Jā, modernie viedie cilindri ar spiediena sensoriem abās kamerās var kontrolēt spēku abos virzienos. Tam nepieciešami divkāršie spiediena devēji un divvirzienu spēka aprēķins (F = P₁×A₁ – P₂×A₂, ņemot vērā stieņa platības atšķirības). Šī funkcija ir noderīga tādās jomās kā materiālu testēšana, tīkla sprieguma kontrole un divvirzienu montāža. Standarta risinājumi parasti kontrolē spēku tikai vienā virzienā (parasti spiežot), lai samazinātu izmaksas un sarežģītību.
-
Rokasgrāmata, kas izskaidro, kā lineārie kodētāji pārvērš mehānisko kustību elektriskajos signālos precīzai pozicionēšanai. ↩
-
Pārskats par to, kā proporcionālās un servovārsti regulē plūsmu un spiedienu hidrauliskajās sistēmās. ↩
-
Tehniskais resurss par spēka-pārvietojuma līkņu interpretēšanu, lai analizētu materiālu īpašības un mehāniskās īpašības. ↩
-
Inženierijas rokasgrāmata par pielaides summēšanas analīzi un tās ietekmi uz montāžas piemērotību un funkcionalitāti. ↩
-
Kustības profilu salīdzinājums, kas izskaidro, kā S-līknes paātrinājums samazina mehāniskās vibrācijas un triecienus. ↩
