

Introducere
Linia dvs. de automatizare de mare viteză ratează pozițiile țintă și pierde timp prețios din ciclul de producție? 🎯 Când glisierele pneumatice depășesc pozițiile prevăzute sau durează prea mult pentru a se stabiliza, randamentul producției are de suferit, precizia poziționării se deteriorează, iar uzura mecanică se accelerează. Aceste probleme de performanță dinamică afectează zilnic nenumărate operațiuni de producție.
Depășirea în glisierele pneumatice apare atunci când căruciorul se deplasează dincolo de poziția țintă înainte de a se stabiliza, în timp ce timpul de stabilizare măsoară cât timp durează sistemul pentru a atinge și menține o poziționare stabilă în limita toleranței acceptabile. Viteză tipică ridicată cilindru fără tijă1 Sistemele înregistrează depășiri de 5-15 mm și timpi de stabilizare de 50-200 ms, dar amortizarea adecvată, optimizarea presiunii și strategiile de control pot reduce aceste valori cu 60-80%.
Chiar în trimestrul trecut, am lucrat cu Marcus, un inginer senior în automatizări la o fabrică de ambalare a semiconductoarelor din Austin, Texas. Sistemul său de preluare și plasare înregistra o depășire de 12 mm la sfârșitul fiecărei curse de 800 mm, provocând erori de poziționare care încetineau timpul de ciclu cu 0,3 secunde per piesă. După ce am analizat configurația cilindrului fără tijă Bepto și am optimizat parametrii de amortizare, depășirea a scăzut la 3 mm, iar timpul de stabilizare s-a îmbunătățit cu 65%. Vă voi prezenta abordarea analitică care a dus la aceste rezultate. 📊
Tabla de conținut
- Ce cauzează depășirea și timpul de stabilizare prelungit în glisierele pneumatice?
- Cum măsurați și cuantificați indicatorii dinamici de performanță?
- Ce soluții inginerești reduc depășirea și îmbunătățesc timpul de stabilizare?
- Cum afectează masa și viteza sarcinii dinamica sistemului?
Ce cauzează depășirea și timpul de stabilizare prelungit în glisierele pneumatice?
Înțelegerea cauzelor fundamentale ale problemelor de performanță dinamică este primul pas către optimizare. 🔍
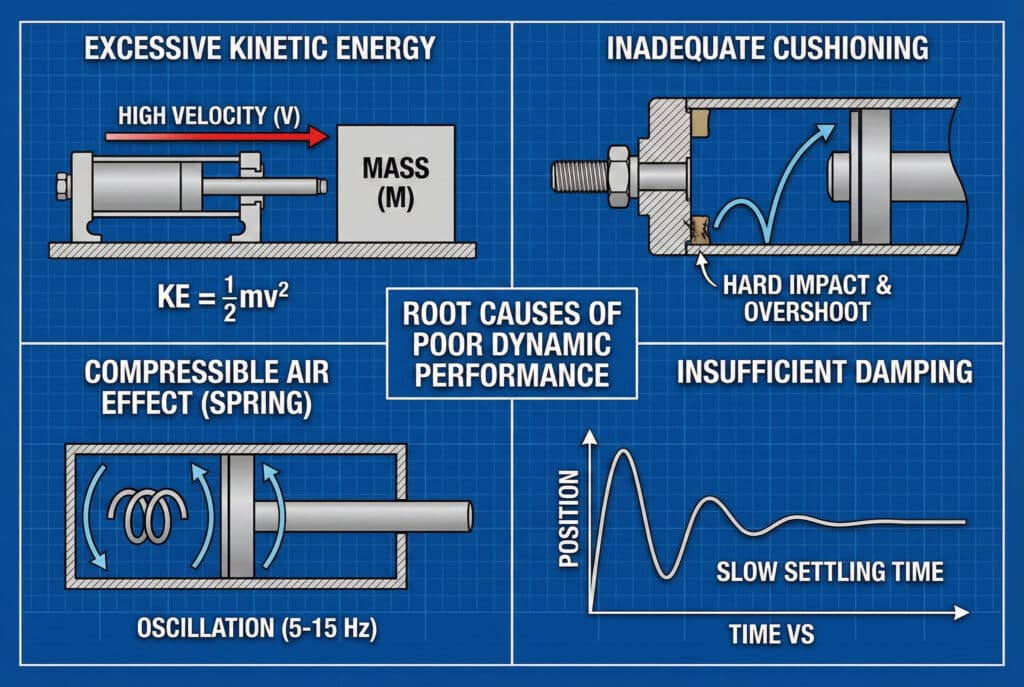
Depășirea și timpul de stabilizare necorespunzător rezultă din patru factori principali: energia cinetică excesivă la sfârșitul cursei, care depășește capacitatea de amortizare, amortizarea pneumatică inadecvată sau amortizoarele mecanice, aerul compresibil care acționează ca un arc și creează oscilații și insuficiența amortizare2 în sistem pentru a disipa rapid energia. Interacțiunea dintre masa în mișcare, viteză și distanța de decelerare determină performanța finală.
Fizica decelerării pneumatice
Când un glisor pneumatic de mare viteză se apropie de poziția finală, energia cinetică trebuie absorbită și disipată. Ecuația energetică ne spune:
$$
Energie cinetică
= \frac{1}{2} \times Masa \times Viteza^{2}
$$
Această energie trebuie absorbită în cadrul distanței de decelerare disponibile. Problemele apar atunci când:
- Viteza este prea mare: Energia crește cu pătratul vitezei
- Masa este excesivă: Sarcinile mai grele au o inerție mai mare.
- Amortizarea este inadecvată: Capacitate de absorbție insuficientă
- Amortizarea este slabă: Energia se transformă în oscilație, mai degrabă decât în căldură.
Deficiențe comune ale sistemului
| Problema | Simptome | Cauza tipică |
|---|---|---|
| Impact puternic | Zgomot puternic, fără depășire | Nu este activată amortizarea |
| Depășire excesivă | >10 mm peste țintă | Amortizare prea moale sau uzată |
| Oscilație | Sărituri multiple | Amortizare insuficientă |
| Sedimentare lentă | >200 ms stabilizare | Amortizare excesivă sau presiune scăzută |
La Bepto, am analizat sute de aplicații cu cilindri fără tijă de mare viteză. Care este cea mai frecventă problemă? Inginerii selectează amortizoarele pe baza recomandărilor din catalog, fără a ține cont de condițiile specifice de viteză și sarcină.
Efectele compresibilității aerului
Spre deosebire de sistemele hidraulice, sistemele pneumatice trebuie să facă față compresibilității aerului. Pe măsură ce amortizorul se activează, aerul comprimat acționează ca un arc, stocând energie care poate provoca reculul. Relația presiune-volum creează frecvențe naturale de oscilație, de obicei între 5-15 Hz, în sistemele cu cilindri fără tijă.
Cum măsurați și cuantificați indicatorii dinamici de performanță?
Măsurarea precisă este esențială pentru îmbunătățirea și validarea sistematică. 📏
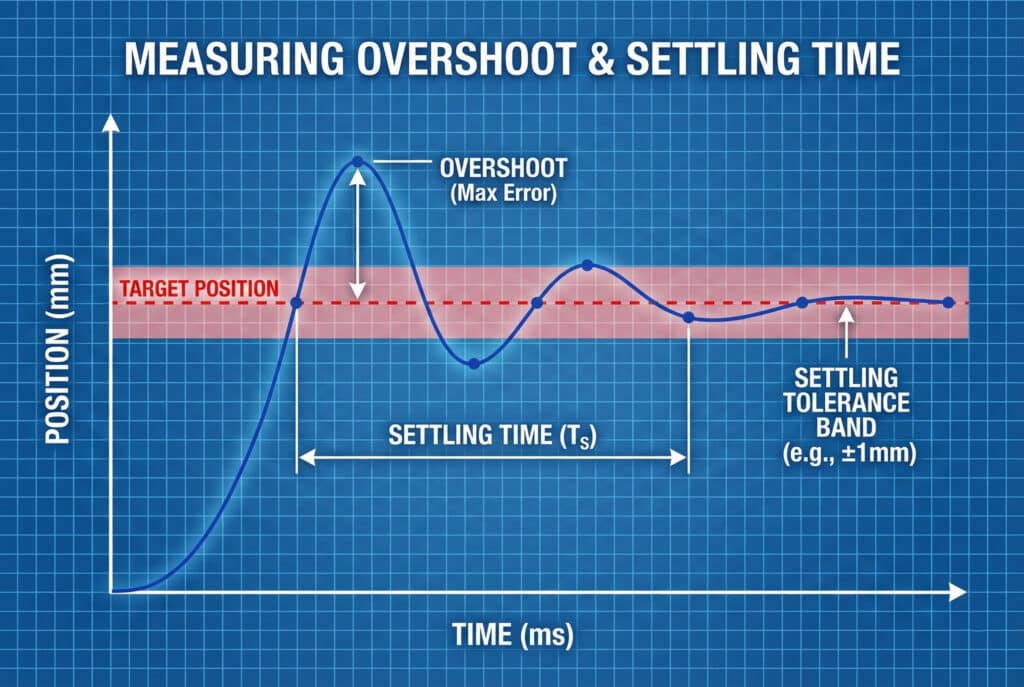
Pentru a măsura corect depășirea și timpul de stabilizare, aveți nevoie de: un senzor de poziție de înaltă rezoluție (rezoluție minimă de 0,1 mm), achiziție de date la o rată de eșantionare de 1 kHz sau mai mare, definiție clară a toleranței de stabilizare (de obicei ±0,5 mm până la ±2 mm) și mai multe teste efectuate în condiții constante. Depășirea se măsoară ca eroare maximă de poziție peste țintă, în timp ce timpul de stabilizare este momentul în care sistemul intră și rămâne în banda de toleranță.
Echipamente de măsurare și configurare
Instrumentele esențiale
- Codificatoare liniare3: Magnetic sau optic, rezoluție 0,01-0,1 mm
- Senzori de deplasare cu laser: Fără contact, timp de răspuns de microsecunde
- Senzori cu cablu de tragere: Rentabil pentru curse mai lungi
- Sistem de achiziție de date: contoare de mare viteză PLC sau DAQ dedicate
Indicatori-cheie de performanță
Depășire (OS): Poziția maximă dincolo de țintă
- Formula: OS = (Poziția maximă – Poziția țintă)
- Interval acceptabil: 2-5 mm pentru majoritatea aplicațiilor industriale
- Aplicații critice: <1 mm
Timpul de stabilizare (Ts): Timpul necesar pentru a atinge și menține toleranța
- Măsurată de la inițierea decelerării până la poziția finală stabilă
- Standard industrial: în limita a ±2% din lungimea cursei
- Țintă de înaltă performanță: <100 ms pentru cursă de 500 mm
Decelerare maximă: Accelerație negativă maximă în timpul frânării
- Măsurată în forțe g (1 g = 9,81 m/s²)
- Interval tipic: 2-5 g pentru echipamente industriale
- Valorile excesive (>8g) indică posibile deteriorări mecanice.
Cele mai bune practici privind protocolul de testare
Jennifer, inginer de calitate la un producător de dispozitive medicale din Boston, Massachusetts, se confrunta cu o poziționare inconsistentă pe linia sa de asamblare. Când am ajutat-o să implementeze un protocol de măsurare structurat – rulând 50 de cicluri de testare la fiecare dintre cele trei viteze cu analiză statistică – ea a descoperit că variațiile de temperatură de-a lungul zilei afectau performanța amortizării cu 40%. Pe baza acestor date, am specificat o amortizare compensată termic care menținea o performanță consistentă. 🌡️
Ce soluții inginerești reduc depășirea și îmbunătățesc timpul de stabilizare?
Există multiple strategii dovedite pentru optimizarea sistematică a performanței dinamice. ⚙️
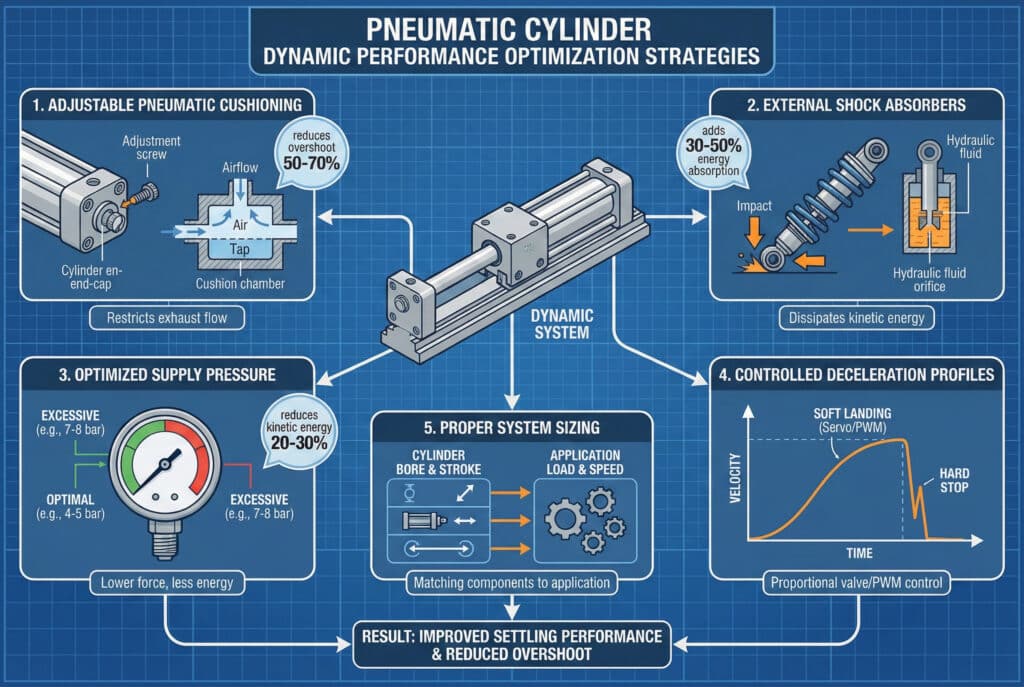
Cinci soluții principale îmbunătățesc performanța de stabilizare: amortizare pneumatică reglabilă (cea mai eficientă, reduce depășirea cu 50-70%), amortizoare externe (adaugă 30-50% absorbție de energie), presiune de alimentare optimizată (reduce energia cinetică cu 20-30%), profiluri de decelerare controlate folosind servovane sau Control PWM4 (permite o aterizare lină) și dimensionarea corespunzătoare a sistemului (potrivirea diametrului cilindrului și a cursei cu aplicația). Combinarea mai multor abordări oferă cele mai bune rezultate.
Optimizarea amortizării pneumatice
Cilindrii moderni fără tijă sunt prevăzuți cu amortizare reglabilă care limitează fluxul de aer de evacuare în timpul ultimilor 10-30 mm de cursă. Reglarea corectă este esențială:
Procedura de reglare a amortizării
- Porniți complet închis: Restricție maximă
- Executați ciclul de testare: Observați depășirea și stabilizarea
- Deschideți cu 1/4 de rotație: Reduceți ușor restricția
- Repetarea testării: Găsiți echilibrul optim
- Setarea documentului: Întoarceri record din poziția închisă
Țintă: Depășire minimă (2-3 mm) cu stabilizare rapidă (<100 ms)
Selectarea amortizoarelor externe
Când amortizarea integrată se dovedește insuficientă, amortizoarele externe asigură o absorbție suplimentară a energiei:
| Tip amortizor | Capacitatea energetică | Ajustare | Costuri | Cea mai bună aplicație |
|---|---|---|---|---|
| Auto-reglabil | Mediu | Automată | Înaltă | Sarcini variabile |
| Orificiu reglabil | Mediu-înalt | Manual | Mediu | Sarcini fixe |
| Industrial pentru sarcini grele | Foarte ridicat | Manual | Foarte ridicat | Condiții extreme |
| Bare de protecție din elastomer | Scăzut | Niciuna | Scăzut | Rezervă pentru sarcini ușoare |
Strategii avansate de control
Pentru aplicații care necesită performanțe excepționale, luați în considerare:
- Supapă proporțională5 control: Reducerea treptată a presiunii în timpul apropierii
- Profiluri de decelerare PWM: Control digital al caracteristicilor de oprire
- Bucle de feedback de poziție: Reglare în timp real pe baza poziției reale
- Detectarea presiunii: Control adaptiv bazat pe condițiile de încărcare
Echipa noastră de ingineri Bepto ajută clienții să implementeze aceste soluții cu ajutorul cilindrilor fără tijă compatibili, care înlocuiesc cilindrii existenți, obținând adesea performanțe care corespund sau depășesc specificațiile OEM la un cost cu 30-40% mai mic.
Cum afectează masa și viteza sarcinii dinamica sistemului?
Relația dintre masă, viteză și performanța dinamică urmează principii inginerești previzibile. 📐
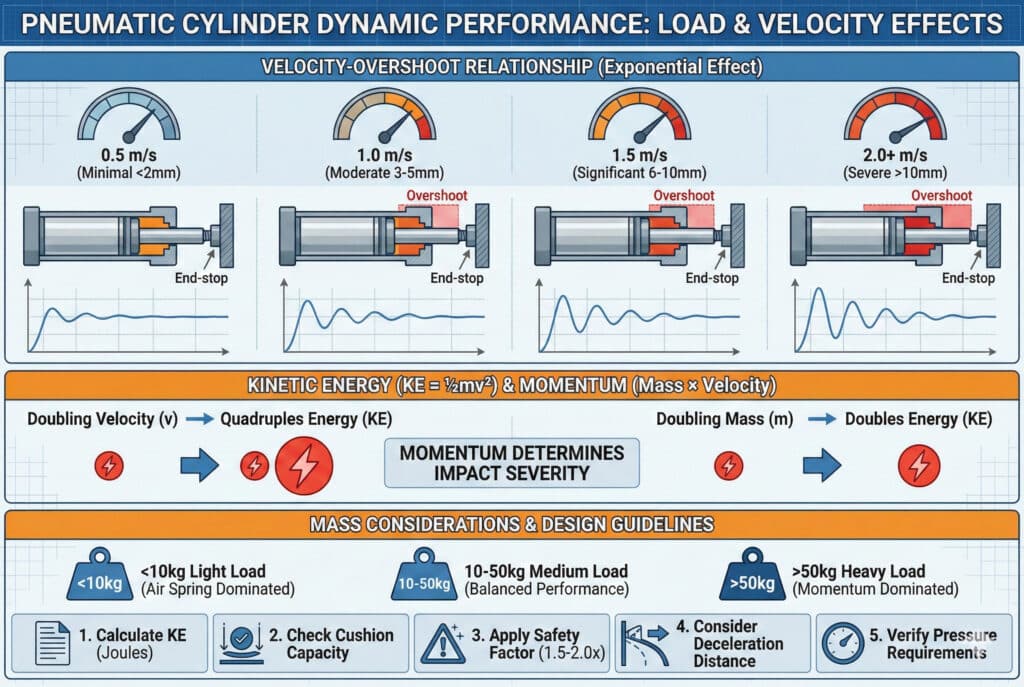
Masa și viteza sarcinii au efecte exponențiale asupra depășirii și timpului de stabilizare: dublarea vitezei cvadruplează energia cinetică, necesitând o capacitate de amortizare de patru ori mai mare, în timp ce dublarea masei dublează energia în mod liniar. Parametrul critic este impulsul (masa × viteza), care determină gravitatea impactului. Sistemele care funcționează la peste 2 m/s cu sarcini care depășesc 50 kg necesită o proiectare atentă pentru a obține performanțe acceptabile de stabilizare.
Relația dintre viteză și depășire
Datele de testare provenite de la mii de instalații arată că:
- 0,5 m/s: Depășire minimă (<2 mm), stabilizare excelentă
- 1,0 m/s: Depășire moderată (3-5 mm), stabilizare bună cu amortizare adecvată
- 1,5 m/s: Depășire semnificativă (6-10 mm), necesită optimizare
- 2,0+ m/s: Depășire severă (>10 mm), necesită soluții avansate
Considerații generale
Încărcături ușoare (<10 kg): Efectele suspensiei pneumatice sunt predominante, pot apărea oscilații
Încărcături medii (10-50 kg): Performanță echilibrată, amortizare standard adecvată
Încărcături grele (>50 kg): Momentul domină, amortizoarele externe sunt adesea necesare
Ghid practic de proiectare
Atunci când specificați glisiere pneumatice pentru aplicații de mare viteză:
- Calculează energia cinetică: KE = ½mv² în jouli
- Verificați capacitatea de amortizare: Specificații ale producătorului în jouli
- Aplicarea factorului de siguranță: 1,5-2,0× pentru fiabilitate
- Luați în considerare distanța de decelerare: Perne mai lungi = frânare mai ușoară
- Verificați cerințele de presiune: O presiune mai mare crește eficiența amortizării
La Bepto, furnizăm specificații tehnice detaliate pentru toate modelele noastre de cilindri fără tijă, inclusiv curbe de capacitate de amortizare la diferite presiuni și viteze. Aceste date permit inginerilor să ia decizii în cunoștință de cauză, în loc să ghicească la selectarea componentelor. 💪
Concluzie
Analiza sistematică și optimizarea timpului de depășire și de stabilizare în glisierele pneumatice de mare viteză oferă îmbunătățiri măsurabile în ceea ce privește durata ciclului, precizia de poziționare și longevitatea echipamentelor, transformând performanța acceptabilă într-un avantaj competitiv prin intermediul principiilor fundamentale de inginerie și al soluțiilor dovedite. 🚀
Întrebări frecvente despre performanța dinamică a glisierelor pneumatice
Î: Care este valoarea acceptabilă a depășirii pentru glisoarele pneumatice industriale?
Pentru majoritatea aplicațiilor industriale, depășirea cu 2-5 mm este acceptabilă și reprezintă o amortizare bine reglată. Aplicațiile de precizie, cum ar fi asamblarea componentelor electronice sau fabricarea dispozitivelor medicale, pot necesita o depășire <1 mm, în timp ce manipularea materialelor mai puțin critice poate tolera 5-10 mm. Cheia este consecvența — depășirea repetabilă poate fi compensată în programare, dar variațiile aleatorii cauzează probleme de calitate.
Î: Cum știu dacă amortizorul meu este reglat corespunzător?
Amortizarea reglată corespunzător produce un sunet ușor, mai degrabă decât o lovitură metalică puternică, o săritură minimă vizibilă la sfârșitul cursei și o poziție de oprire constantă în limita a ±2 mm pe mai multe cicluri. Dacă auziți lovituri puternice, observați o săritură excesivă sau variații de poziție >5 mm, amortizarea trebuie reglată sau sistemul dvs. necesită amortizoare externe.
Î: Pot reduce timpul de stabilizare prin creșterea presiunii aerului?
Da, dar cu randamente în scădere și potențiale dezavantaje. Creșterea presiunii de la 6 bari la 8 bari îmbunătățește de obicei timpul de stabilizare cu 15-25%, prin creșterea eficienței amortizării și a rigidității sistemului. Cu toate acestea, presiunile peste 8 bari rareori oferă beneficii suplimentare și cresc consumul de aer, rata de uzură și nivelul de zgomot. Optimizați reglarea amortizării înainte de a crește presiunea.
Î: De ce glisiera mea pneumatică funcționează diferit când este caldă față de când este rece?
Temperatura afectează densitatea aerului, frecarea garniturii și vâscozitatea lubrifiantului, toate acestea având un impact asupra performanței dinamice. Sistemele reci (sub 15 °C) prezintă o frecare crescută și un răspuns mai lent, în timp ce sistemele calde (peste 40 °C) înregistrează o eficiență redusă a amortizării, pe măsură ce densitatea aerului scade. Variațiile de temperatură de 20 °C pot modifica timpul de stabilizare cu 30-40%. Luați în considerare amortizarea compensată termic sau controalele de mediu pentru aplicații critice.
Î: Ar trebui să folosesc amortizoare externe sau să mă bazez pe amortizarea încorporată?
Amortizarea pneumatică încorporată ar trebui să fie prima dvs. alegere – este integrată, rentabilă și suficientă pentru majoritatea aplicațiilor. Adăugați amortizoare externe atunci când: energia cinetică depășește capacitatea amortizorului (de obicei >50 jouli), aveți nevoie de ajustabilitate pentru sarcini variabile, amortizoarele încorporate sunt uzate sau deteriorate sau operați la viteze extreme (>2 m/s). Echipa noastră tehnică Bepto poate calcula cerințele dvs. specifice de energie și vă poate recomanda soluții adecvate.
-
Înțelegeți mecanica și aplicațiile cilindrilor pneumatici fără tijă. ↩
-
Explorați modul în care forțele de amortizare disipă energia pentru a reduce oscilațiile mecanice. ↩
-
Revizuiți principiile de funcționare ale codificatoarelor liniare magnetice și optice. ↩
-
Aflați cum modularea lățimii impulsului (PWM) gestionează controlul debitului pneumatic. ↩
-
Înțelegeți funcția supapelor proporționale în controlul precis al mișcării. ↩
