

Inledning
Missar din höghastighetsautomatiseringslinje målpositioner och slösar bort värdefull cykeltid? 🎯 När pneumatiska glidbanor överskrider sina avsedda positioner eller tar för lång tid att stabilisera sig, påverkas produktionsgenomströmningen negativt, positioneringsnoggrannheten försämras och det mekaniska slitaget accelererar. Dessa dynamiska prestandaproblem plågar dagligen otaliga tillverkningsprocesser.
Överskjutning i pneumatiska slider uppstår när vagnen rör sig förbi sin målposition innan den stabiliseras, medan stabiliseringstiden mäter hur lång tid det tar för systemet att nå och upprätthålla en stabil positionering inom acceptabel tolerans. Typisk höghastighet stånglös cylinder1 Systemen upplever 5–15 mm överskjutning och 50–200 ms stabiliseringstider, men med rätt dämpning, tryckoptimering och kontrollstrategier kan dessa minskas med 60–80%.
Förra kvartalet arbetade jag med Marcus, en senior automatiseringsingenjör vid en halvledarförpackningsanläggning i Austin, Texas. Hans pick-and-place-system upplevde 12 mm överskjutning i slutet av varje 800 mm-slag, vilket orsakade positioneringsfel som saktade ner hans cykeltid med 0,3 sekunder per del. Efter att vi analyserat hans Bepto-konfiguration med stavlösa cylindrar och optimerat dämpningsparametrarna minskade överskridandet till 3 mm och stabiliseringstiden förbättrades med 65%. Låt mig dela med mig av den analytiska metod som gav dessa resultat. 📊
Innehållsförteckning
- Vad orsakar överskjutning och förlängd stabiliseringstid i pneumatiska glidbanor?
- Hur mäter och kvantifierar man dynamiska prestandamätvärden?
- Vilka tekniska lösningar minskar överskridandet och förbättrar stabiliseringstiden?
- Hur påverkar lastens massa och hastighet systemdynamiken?
Vad orsakar överskjutning och förlängd stabiliseringstid i pneumatiska glidbanor?
Att förstå de grundläggande orsakerna till dynamiska prestandaproblem är det första steget mot optimering. 🔍
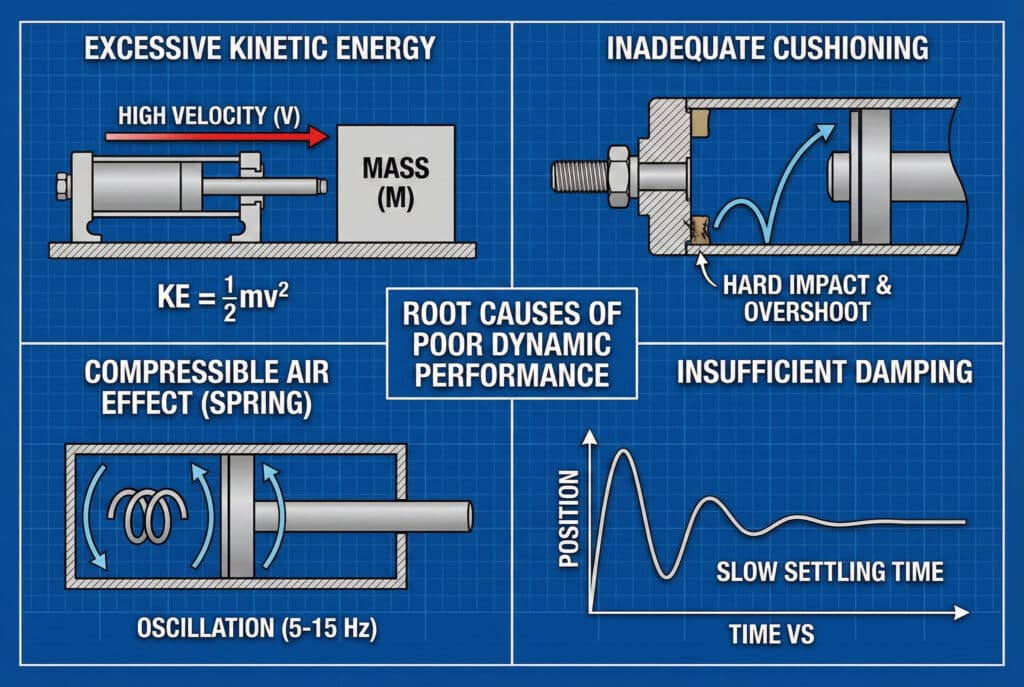
Överskjutning och dålig stabiliseringstid beror på fyra huvudfaktorer: överdriven kinetisk energi vid slutet av slaget som överväldigar dämpningskapaciteten, otillräcklig pneumatisk dämpning eller mekaniska stötdämpare, komprimerbar luft som fungerar som en fjäder som skapar svängningar och otillräcklig dämpning2 i systemet för att snabbt avleda energi. Samspelet mellan rörlig massa, hastighet och bromssträcka avgör den slutliga prestandan.
Fysiken bakom pneumatisk retardation
När en höghastighetspneumatisk glidare närmar sig sitt slutläge måste kinetisk energi absorberas och avledas. Energiekvationen säger oss:
$$
Kinetisk energi
= \frac{1}{2} \times massa \times hastighet^{2}
$$
Denna energi måste absorberas inom den tillgängliga bromssträckan. Problem uppstår när:
- Hastigheten är för hög: Energin ökar med hastighetens kvadrat.
- Massan är överdriven: Tyngre laster har större rörelsemängd.
- Dämpningen är otillräcklig: Otillräcklig absorptionskapacitet
- Dämpningen är dålig: Energi omvandlas till svängning istället för värme
Vanliga brister i systemet
| Utgåva | Symptom | Typisk orsak |
|---|---|---|
| Hård påverkan | Hög smäll, ingen överskjutning | Ingen dämpning aktiverad |
| Överdriven överskjutning | >10 mm förbi målet | Dämpningen är för mjuk eller sliten |
| Oscillation | Flera studsar | Otillräcklig dämpning |
| Långsam sedimentering | >200 ms stabilisering | Överdämpad eller lågt tryck |
På Bepto har vi analyserat hundratals tillämpningar av höghastighetscylindrar utan stång. Det vanligaste problemet? Ingenjörer väljer dämpning utifrån rekommendationer i katalogen utan att ta hänsyn till specifika hastighets- och belastningsförhållanden.
Effekter av luftens kompressibilitet
Till skillnad från hydrauliska system måste pneumatiska system hantera luftens kompressibilitet. När dämparen aktiveras fungerar den komprimerade luften som en fjäder och lagrar energi som kan orsaka återfjädring. Förhållandet mellan tryck och volym skapar naturliga svängningsfrekvenser som vanligtvis ligger mellan 5 och 15 Hz i stånglösa cylindersystem.
Hur mäter och kvantifierar man dynamiska prestandamätvärden?
Noggranna mätningar är avgörande för systematiska förbättringar och validering. 📏
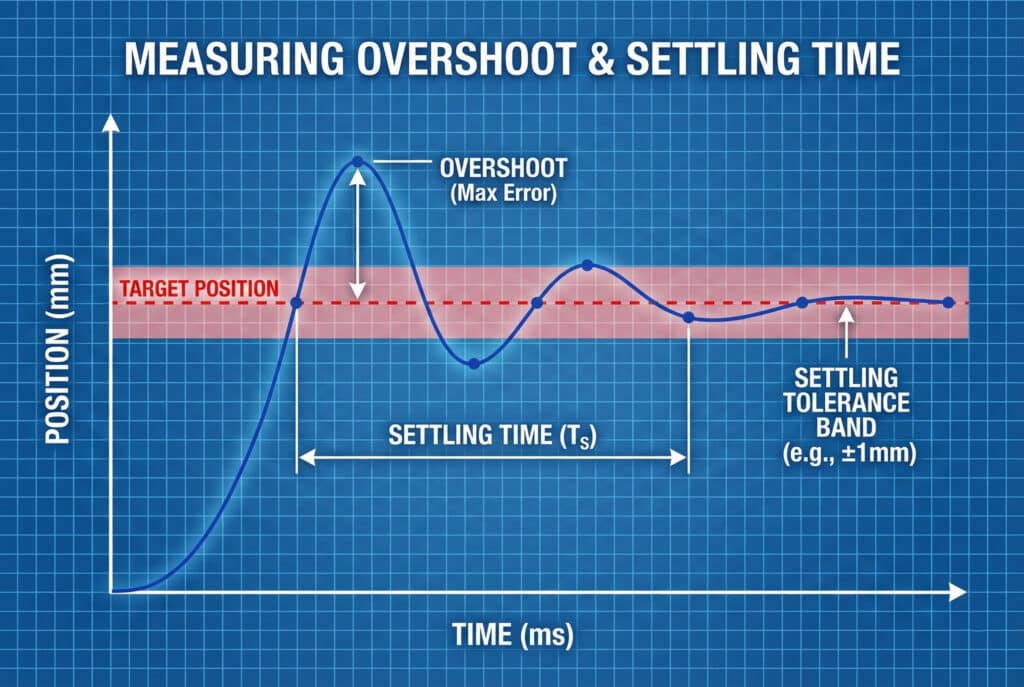
För att korrekt mäta överskjutning och stabiliseringstid behöver du: en högupplöst positionssensor (minst 0,1 mm upplösning), datainsamling med en samplingsfrekvens på 1 kHz eller högre, tydlig definition av stabiliseringstolerans (vanligtvis ±0,5 mm till ±2 mm) och flera testkörningar under konsekventa förhållanden. Överskjutning mäts som maximalt positionsfel bortom målet, medan stabiliseringstid är när systemet går in i och förblir inom toleransbandet.
Mätutrustning och installation
Väsentlig instrumentering
- Linjära pulsgivare3: Magnetisk eller optisk, upplösning 0,01–0,1 mm
- Laseravståndssensorer: Beröringsfri, svarstid på mikrosekunder
- Dra-trådsensorer: Kostnadseffektivt för längre slag
- Datainsamlingssystem: PLC-höghastighetsräknare eller dedikerad DAQ
Viktiga resultatindikatorer
Överskridande (OS): Maximal position bortom målet
- Formel: OS = (topp position – målposition)
- Acceptabelt intervall: 2–5 mm för de flesta industriella tillämpningar
- Kritiska tillämpningar: <1 mm
Stabiliseringstid (Ts): Tid för att nå och hålla sig inom toleransgränsen
- Mätt från inledningen av inbromsningen till slutlig stabil position
- Branschstandard: Inom ±2% av slaglängd
- Högpresterande mål: <100 ms för 500 mm slaglängd
Toppbromsning: Maximal negativ acceleration under stopp
- Mätt i g-krafter (1 g = 9,81 m/s²)
- Typisk räckvidd: 2–5 g för industriell utrustning
- Överdrivna värden (>8 g) indikerar potentiella mekaniska skador.
Testprotokoll – bästa praxis
Jennifer, kvalitetsingenjör hos en tillverkare av medicintekniska produkter i Boston, Massachusetts, hade problem med inkonsekvent positionering på sin monteringslinje. När vi hjälpte henne att implementera ett strukturerat mätprotokoll – med 50 testcykler vid var och en av tre hastigheter med statistisk analys – upptäckte hon att temperaturvariationer under dagen påverkade kuddens prestanda med 40%. Med hjälp av dessa data specificerade vi temperaturkompenserad dämpning som bibehöll en jämn prestanda. 🌡️
Vilka tekniska lösningar minskar överskridandet och förbättrar stabiliseringstiden?
Det finns flera beprövade strategier för att systematiskt optimera dynamisk prestanda. ⚙️
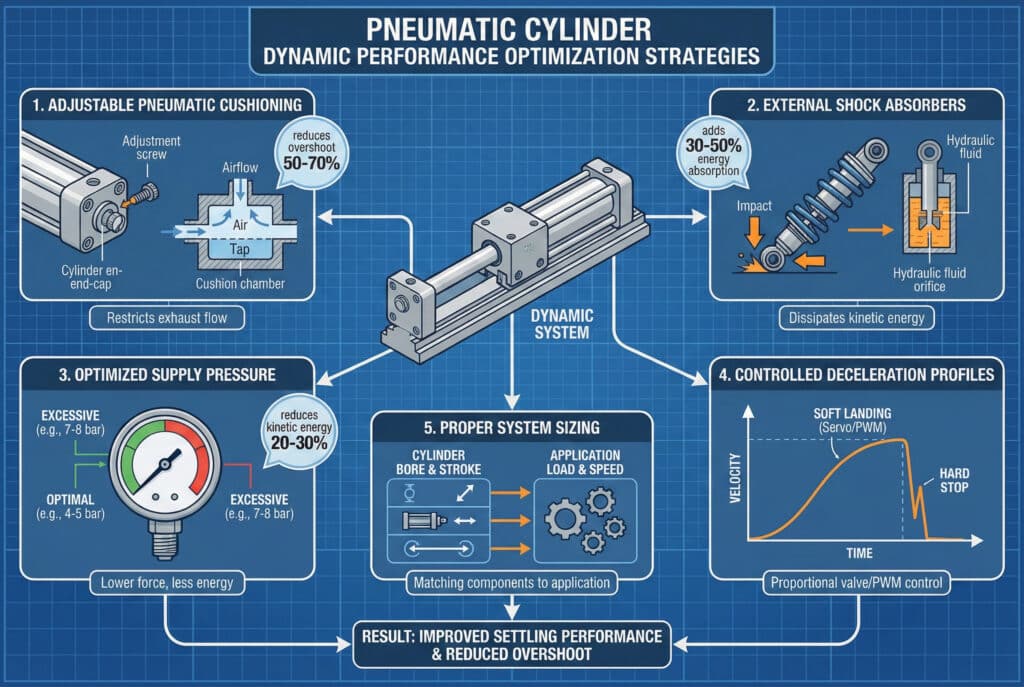
Fem primära lösningar förbättrar stabiliseringsprestandan: justerbar pneumatisk dämpning (mest effektiv, minskar överskridandet med 50–70%), externa stötdämpare (lägger till 30–50% energiabsorption), optimerat tillförselstryck (minskar kinetisk energi med 20–30%), kontrollerade retardationsprofiler med hjälp av servoventiler eller PWM-styrning4 (möjliggör mjuk landning) och korrekt systemdimensionering (anpassning av cylinderdiameter och slaglängd till applikationen). Genom att kombinera flera metoder uppnås bästa resultat.
Optimering av pneumatisk dämpning
Moderna stånglösa cylindrar har justerbar dämpning som begränsar utblåsningsflödet under de sista 10–30 mm av slaglängden. Korrekt justering är avgörande:
Procedur för justering av dämpning
- Start helt stängd: Maximal begränsning
- Kör testcykel: Observera överskjutning och stabilisering
- Öppna 1/4 varv: Minska begränsningen något
- Upprepa testet: Hitta optimal balans
- Dokumentinställning: Rekordvändningar från stängt läge
Mål: Minimal överskjutning (2–3 mm) med snabbast möjliga stabilisering (<100 ms)
Val av extern stötdämpare
När den inbyggda dämpningen inte räcker till, ger externa stötdämpare ytterligare energiabsorption:
| Stötdämpare Typ | Energi Kapacitet | Justering | Kostnad | Bästa tillämpning |
|---|---|---|---|---|
| Självjusterande | Medium | Automatisk | Hög | Variabla belastningar |
| Justerbar öppning | Medelhög-Hög | Manuell | Medium | Fasta laster |
| Tung industriell | Mycket hög | Manuell | Mycket hög | Extrema förhållanden |
| Elastomerstötfångare | Låg | Ingen | Låg | Lätt reserv |
Avancerade styrstrategier
För applikationer som kräver exceptionell prestanda, överväg följande:
- Proportionell ventil5 kontroll: Gradvis tryckminskning under inflygningen
- PWM-bromsningsprofiler: Digital styrning av stoppegenskaper
- Positionsåterkopplingsslingor: Justering i realtid baserat på faktisk position
- Tryckavkänning: Adaptiv styrning baserad på belastningsförhållanden
Vårt Bepto-teknikteam hjälper kunderna att implementera dessa lösningar med våra kompatibla stavlösa cylinderersättningar, som ofta uppnår prestanda som motsvarar eller överträffar OEM-specifikationerna till en 30-40% lägre kostnad.
Hur påverkar lastens massa och hastighet systemdynamiken?
Förhållandet mellan massa, hastighet och dynamisk prestanda följer förutsägbara tekniska principer. 📐
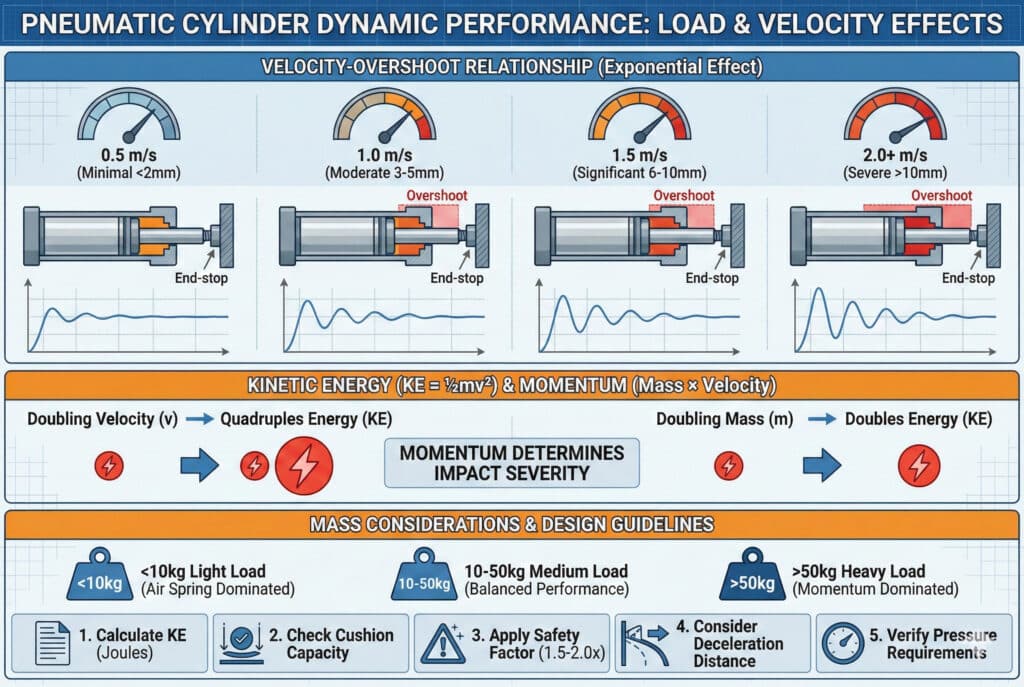
Lastens massa och hastighet har exponentiella effekter på överskjutning och stabiliseringstid: en fördubbling av hastigheten fyrdubblar den kinetiska energin, vilket kräver fyra gånger så stor dämpningskapacitet, medan en fördubbling av massan fördubblar energin linjärt. Den kritiska parametern är rörelsemängden (massa × hastighet), som avgör hur kraftig kollisionen blir. System som arbetar med hastigheter över 2 m/s och laster över 50 kg kräver noggrann konstruktion för att uppnå acceptabel stabiliseringsprestanda.
Förhållandet mellan hastighet och överskridande
Testdata från tusentals installationer visar:
- 0,5 m/s: Minimal överskjutning (<2 mm), utmärkt stabilisering
- 1,0 m/s: Måttlig överskjutning (3–5 mm), bra dämpning med korrekt stötdämpning
- 1,5 m/s: Betydande överskridande (6–10 mm), kräver optimering
- 2,0+ m/s: Kraftig överskjutning (>10 mm) kräver avancerade lösningar
Massöverväganden
Lätta laster (<10 kg): Luftfjäderns effekter dominerar, kan uppstå svängningar
Medelstora laster (10–50 kg): Balanserad prestanda, standarddämpning tillräcklig
Tunga laster (>50 kg): Momentum dominerar, externa stötdämpare krävs ofta
Praktiska riktlinjer för design
Vid specifikation av pneumatiska glidbanor för höghastighetsapplikationer:
- Beräkna kinetisk energi: KE = ½mv² i joule
- Kontrollera dämpningskapaciteten: Tillverkarens specifikationer i joule
- Tillämpa säkerhetsfaktor: 1,5–2,0× för tillförlitlighet
- Beakta bromssträckan: Längre kuddar = mjukare stopp
- Kontrollera tryckkraven: Högre tryck ökar dämpningens effektivitet
På Bepto tillhandahåller vi detaljerade tekniska specifikationer för alla våra stånglösa cylindermodeller, inklusive dämpningskapacitetskurvor för olika tryck och hastigheter. Dessa data gör det möjligt för ingenjörer att fatta välgrundade beslut istället för att gissa sig fram vid val av komponenter. 💪
Slutsats
Systematisk analys och optimering av överskjutning och stabiliseringstid i höghastighetspneumatiska glidbanor ger mätbara förbättringar av cykeltid, positioneringsnoggrannhet och utrustningens livslängd – vilket omvandlar acceptabel prestanda till konkurrensfördelar genom grundläggande teknik och beprövade lösningar. 🚀
Vanliga frågor om pneumatiska glidbanors dynamiska prestanda
F: Vad är ett acceptabelt överskjutningsvärde för industriella pneumatiska glidbanor?
För de flesta industriella tillämpningar är en överskjutning på mellan 2 och 5 mm acceptabel och representerar en väl avstämd dämpning. Precisionsapplikationer som elektronikmontering eller tillverkning av medicintekniska produkter kan kräva en överskjutning på mindre än 1 mm, medan mindre kritisk materialhantering kan tolerera 5–10 mm. Nyckeln är konsistens – repeterbar överskjutning kan kompenseras i programmeringen, men slumpmässiga variationer orsakar kvalitetsproblem.
F: Hur vet jag om min dämpning är rätt justerad?
Korrekt justerad dämpning ger ett mjukt “susande” ljud istället för ett hårt metalliskt smällande ljud, minimal synlig studs vid slutet av slaget och en jämn stopposition inom ±2 mm över flera cykler. Om du hör höga smällar, ser överdriven studs eller upplever positionsvariationer >5 mm behöver din dämpning justeras eller så behöver ditt system externa stötdämpare.
F: Kan jag minska sedimenteringstiden genom att öka lufttrycket?
Ja, men med avtagande avkastning och potentiella nackdelar. Att öka trycket från 6 bar till 8 bar förbättrar vanligtvis stabiliseringstiden med 15–25% genom att öka dämpningseffektiviteten och systemets styvhet. Tryck över 8 bar ger dock sällan ytterligare fördelar och ökar luftförbrukningen, slitaget och ljudnivån. Optimera dämpningsjusteringen innan du ökar trycket.
F: Varför fungerar min pneumatiska slida olika när den är varm respektive kall?
Temperaturen påverkar lufttätheten, tätningsfriktionen och smörjmedlets viskositet – alla faktorer som påverkar den dynamiska prestandan. Kalla system (under 15 °C) uppvisar ökad friktion och långsammare respons, medan varma system (över 40 °C) upplever minskad dämpningseffektivitet när lufttätheten minskar. Temperatursvängningar på 20 °C kan förändra stabiliseringstiden med 30–40%. Överväg temperaturkompenserad dämpning eller miljökontroll för kritiska tillämpningar.
F: Ska jag använda externa stötdämpare eller lita på den inbyggda dämpningen?
Inbyggd pneumatisk dämpning bör vara ditt förstahandsval – den är integrerad, kostnadseffektiv och tillräcklig för de flesta tillämpningar. Lägg till externa stötdämpare när: den kinetiska energin överstiger dämpningskapaciteten (vanligtvis >50 joule), du behöver justerbarhet för varierande belastningar, de inbyggda dämparna är slitna eller skadade, eller du arbetar med extrema hastigheter (>2 m/s). Vårt tekniska team på Bepto kan beräkna dina specifika energibehov och rekommendera lämpliga lösningar.
-
Förstå mekaniken och tillämpningarna för stånglösa pneumatiska cylindrar. ↩
-
Utforska hur dämpande krafter sprider energi för att minska mekanisk svängning. ↩
-
Gå igenom funktionsprinciperna för magnetiska och optiska linjära givare. ↩
-
Lär dig hur pulsbreddsmodulering (PWM) hanterar pneumatisk flödeskontroll. ↩
-
Förstå funktionen hos proportionella ventiler i precisionsstyrning. ↩
