

Johdanto
Olet investoinut kehittyneeseen servopneumaattiseen järjestelmään odottaen servosähköistä suorituskykyä pneumaattiseen hintaan, mutta sen sijaan kamppailet värähtelyjen, ylitysvirheiden ja hitaan vasteen kanssa, jotka saavat ohjausinsinöörisi repimään hiuksiaan. 😫 PID-silmukat eivät vakaudu, paikannustarkkuus on epätasaista ja sykliajat ovat ennustettua pidemmät. Ongelma ei ole laitteistossa tai ohjelmointitaidoissasi, vaan ilman puristuvuus, näkymätön vihollinen, joka muuttaa tarkasti viritetyt ohjausalgoritmisi arvailuksi.
Ilman puristuvuus aiheuttaa servopneumaattisissa säätösilmukoissa epälineaarisen, paineesta riippuvan jousivaikutuksen, joka aiheuttaa vaiheen viivettä, vähentää luonnollista taajuutta ja luo sijainnista riippuvaa dynamiikkaa. Tämä edellyttää erityisiä mallinnus- ja kompensointistrategioita, jotta saavutetaan vakaa ja suorituskykyinen säätö. Toisin kuin hydrauliset tai sähköiset järjestelmät, joissa on jäykkä mekaaninen kytkentä, pneumaattisissa järjestelmissä on otettava huomioon se, että ilma toimii vaihtelevan jäykkyyden jousena venttiilin ja kuorman välillä.
Olen ottanut käyttöön kymmeniä servopneumaattisia järjestelmiä kolmella mantereella, ja suurin osa insinööreistä kompastuu puristuvuusmallinnukseen. Viime vuosineljänneksellä autoin kalifornialaista robotiikan integraattoria pelastamaan projektin, joka oli kolme kuukautta myöhässä aikataulustaan, koska heidän ohjausryhmänsä ei ollut ottanut huomioon pneumaattista puristuvuutta servojen virityksessä.
Sisällysluettelo
- Mikä on puristuvuuskerroin ja miksi se hallitsee servopneumaattista dynamiikkaa?
- Kuinka mallintaa ilman puristuvuus matemaattisesti ohjausjärjestelmissä?
- Mitkä ohjausstrategiat kompensoivat puristuvuusvaikutuksia?
- Kuinka Bepto-sauvaton sylinteri voi parantaa servopneumaattista suorituskykyä?
Mikä on puristuvuuskerroin ja miksi se hallitsee servopneumaattista dynamiikkaa?
Ilman puristuvuus ei ole vain pieni haitta – se muuttaa perustavanlaatuisesti ohjausjärjestelmän toimintaa. 🌪️
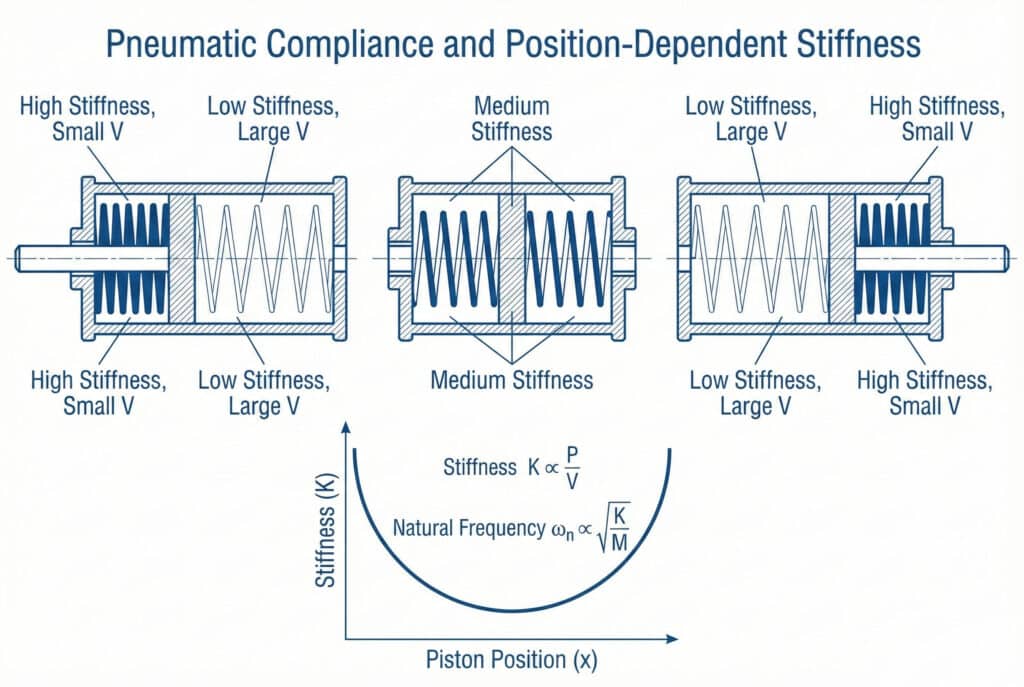
Puristuvuuskerroin kuvaa, kuinka ilman tilavuus muuttuu paineen mukaan seuraavan kaavan mukaisesti ideaalikaasun laki1 (PV=nRT), jolloin syntyy pneumaattinen jousi, jonka jäykkyys on verrannollinen paineeseen ja kääntäen verrannollinen tilavuuteen. Tämä jousivaikutus aiheuttaa tyypillisesti 3–15 Hz:n resonanssitaajuuden, joka rajoittaa ohjauksen kaistanleveyttä, aiheuttaa ylitysvaikutuksen ja tekee järjestelmän dynamiikasta erittäin riippuvaisen sijainnista, kuormituksesta ja syöttöpaineesta. Sähköiset ja hydrauliset toimilaitteet toimivat jäykkinä mekaanisina järjestelminä, kun taas servopneumaattiset toimilaitteet toimivat massajousi-vaimenninjärjestelminä, joissa jousen jäykkyys muuttuu jatkuvasti.
Pneumaattisen joustavuuden fysiikka
Kun painat sylinterikammiota, et vain luo voimaa, vaan puristat ilmamolekyylejä pienempään tilavuuteen. Tämä puristettu ilma toimii elastisena jousena, joka varastoi energiaa. Suhdetta säätelee:
$$
P × V = n × R × T
$$
Missä:
- P = absoluuttinen paine (Pa)
- V = tilavuus (m³)
- n = kaasun moolien lukumäärä
- R = yleinen kaasuvakio (8,314 J/mol·K)
- T = absoluuttinen lämpötila (K)
Valvontatarkoituksia varten kiinnitämme huomiota siihen, miten paine muuttuu tilavuuden muutoksen myötä:
$$
\Delta P = -\left( \frac{\kappa \, P_{0}}{V_{0}} \right) \times \Delta V
$$
Jossa κ on polytrooppinen eksponentti2 (1,0 isotermisille, 1,4 adiabaattisille prosesseille).
Tämä yhtälö paljastaa tärkeän oivalluksen: pneumaattinen jäykkyys on verrannollinen paineeseen ja kääntäen verrannollinen tilavuuteen. Kaksinkertainen paine, kaksinkertainen jäykkyys. Kaksinkertainen tilavuus, puolet jäykkyydestä.
Miksi tämä on tärkeää hallinnan kannalta
Servosähköisessä järjestelmässä moottori ohjaa kuormaa suoraan jäykän mekaanisen kytkennän kautta, kun annat liikekomennon. Siirtofunktio on suhteellisen yksinkertainen – pohjimmiltaan integraattori, jossa on jonkin verran kitkaa.
Servopneumaattisessa järjestelmässä venttiili säätelee painetta, paine luo voiman männän alueen kautta, mutta tämän voiman on puristettava tai laajennettava ilmaa ennen kuorman liikuttamista. Sinulla on:
Venttiili → Paine → Pneumaattinen jousi → Kuormituksen liike
Tuo pneumaattinen jousi aiheuttaa toisen asteen dynamiikan (resonanssin), joka hallitsee järjestelmän käyttäytymistä.
Paikasta riippuva dynamiikka
Tässä kohtaa asia muuttuu hankalaksi: kun sylinteri laajenee, tilavuus kasvaa toisella puolella ja pienenee toisella puolella. Tämä tarkoittaa seuraavaa:
- Pneumaattinen jäykkyys muuttuu asennon mukaan (korkeampi iskun lopussa, matalampi iskun keskivaiheessa)
- Luonnollinen taajuus vaihtelee iskun aikana (voi muuttua 2–3-kertaisesti)
- Optimaaliset ohjausvahvistukset ovat sijainnista riippuvaisia (yhdessä asemassa toimivat voitot aiheuttavat epävakautta toisessa asemassa)
Tyypilliset pneumaattisen järjestelmän ominaisuudet
| Parametri | Servosähköinen | Servohydraulinen | Servopneumaattinen |
|---|---|---|---|
| Kytkentäjäykkyys | Ääretön (jäykkä) | Erittäin korkea | Alhainen (vaihteleva) |
| Luonnollinen taajuus | 50-200 Hz | 30–100 Hz | 3–15 Hz |
| Kaistanleveys | 20–50 Hz | 10-30 Hz | 1–5 Hz |
| Sijainnista riippuvuus | Ei ole | Minimaalinen | Vakava |
| Vaimennussuhde | 0.1-0.3 | 0.3-0.7 | 0.1-0.4 |
| Epälineaarisuus | Matala | Medium | Korkea |
Todellisen maailman seuraukset
David, ohjausinsinööri autotehtaalla Ohiossa, oli epätoivoinen servopneumaattisen pick-and-place-järjestelmän kanssa. Sen paikannustarkkuus vaihteli ±0,5 mm:stä iskun päissä ±3 mm:iin iskun keskivaiheessa. Hän oli viettänyt viikkoja kokeilemalla erilaisia PID-vahvistuksia, mutta ei löytänyt asetuksia, jotka toimisivat koko iskun ajan.
Kun analysoin hänen järjestelmäänsä, ongelma oli ilmeinen: hän kohteli pneumaattista toimilaitetta kuin sähköistä servoa. Iskun puolivälissä suuret ilmamäärät loivat alhaisen jäykkyyden ja 4 Hz:n ominaisvärähtelytaajuuden. Iskun lopussa puristetut ilmamäärät loivat korkean jäykkyyden ja 12 Hz:n ominaisvärähtelytaajuuden – kolminkertainen muutos! Hänen kiinteävahvistuksinen PID-säädin ei mitenkään voinut käsitellä tällaista vaihtelua.
Toteutimme voittojen aikataulutus3 sijainnin perusteella ja lisätty feedforward-painekompensaatio. Hänen sijaintitarkkuutensa parani ±0,8 mm:iin koko iskun pituudella, ja hänen sykliaikansa lyheni 20%, koska pystyimme käyttämään aggressiivisempia vahvistuksia ilman epävakautta. 🎯
Kuinka mallintaa ilman puristuvuus matemaattisesti ohjausjärjestelmissä?
Et voi hallita sitä, mitä et voi mallintaa – ja tarkka mallinnus on tehokkaan servopneumaattisen ohjauksen perusta. 📐
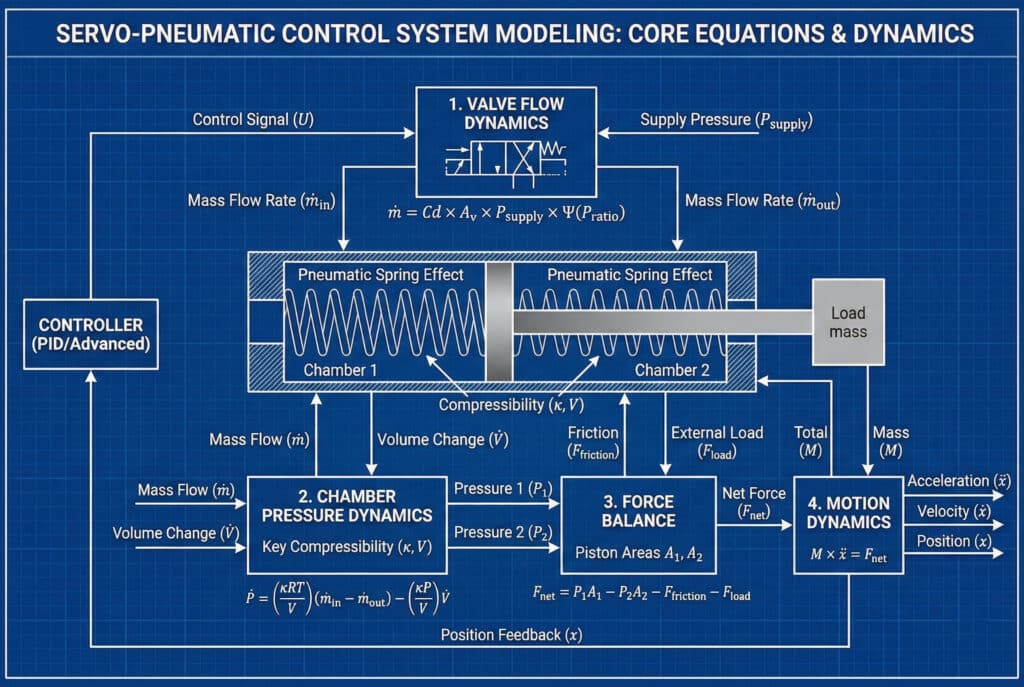
Tavallisessa servopneumaattisessa mallissa jokainen sylinterikammio käsitellään muuttuvan tilavuuden paineastiana, jonka massavirta sisään/ulos määräytyy venttiilin dynamiikan, paineen voimaan muuntamisen mäntäpinnan kautta ja kuorman liikkeen Newtonin toisen lain mukaisesti. Tuloksena on neljännen asteen epälineaarinen differentiaaliyhtälöjärjestelmä, joka voidaan linearisoida toimintapisteiden ympärillä ohjaussuunnittelua varten. Tämä malli ottaa huomioon olennaiset puristuvuusvaikutukset ja on samalla helposti hallittavissa reaaliaikaisen ohjauksen toteutuksessa.
Ydinyhtälöt
Täydellinen servopneumaattinen malli koostuu neljästä toisiinsa kytketystä alijärjestelmästä:
1. Venttiilin virtausdynamiikka
Kunkin kammion massavirta riippuu venttiilin avautumisesta ja paine-erosta:
$$
\dot{m}
= C_{d} \times A_{v} \times P_{supply} \times \Psi(P_{ratio})
$$
Missä:
- ṁ = massavirta (kg/s)
- Cd = purkauskerroin (tyypillisesti 0,6–0,8)
- A_v = venttiilin aukon pinta-ala (m²)
- Ψ = virtaustoiminto (riippuu paine-suhteesta)
2. Kammion paineiden dynamiikka
Paineen muutokset perustuvat massavirtaan ja tilavuuden muutokseen:
Ṗ = (κ × R × T / V) × (ṁ_in – ṁ_out) – (κ × P / V) × V̇
Tämä on keskeinen puristuvuusyhtälö. Ensimmäinen termi edustaa massavirrasta johtuvaa paineen muutosta. Toinen termi edustaa tilavuuden muutoksesta (puristuminen/laajeneminen) johtuvaa paineen muutosta.
3. Voimien tasapaino
Mäntään/kärryyn kohdistuva nettovoima:
$$
F_{net}
= P_{1} \times A_{1}
– P_{2} \times A_{2}
– F_{kitka}
– F_{kuorma}
$$
Missä:
- P₁, P₂ = kammion paineet
- A₁, A₂ = teholliset mäntäpinnat
- F_kitka = kitkavoima (nopeudesta riippuva)
- F_load = ulkoinen kuormitusvoima
4. Liikkeiden dynamiikka
Newtonin toinen laki:
$$
M \,\ddot{x} = F_{net}
$$
Jossa M on liikkuva kokonaismassa ja x on sijainti.
Linearisointi ohjaussuunnittelua varten
Yllä oleva epälineaarinen malli on liian monimutkainen klassiseen ohjaussuunnitteluun. Linearisoi toimintapisteen (tasapainoasento ja paine) ympärillä:
Siirtofunktio4:
$$
\frac{X(s)}{U(s)}
= \frac{K}{\,s^{2} + 2 \zeta \omega_{n} s + \omega_{n}^{2}\,}
$$
Tämä paljastaa kriittisen toisen asteen dynamiikan seuraavasti:
$$
\omega_{n}
= \sqrt{\frac{\kappa \, P_{avg} \, A^{2}}{M \, V_{avg}}}
$$
— Luonnollinen taajuus
ζ = vaimennussuhde (riippuu kitkasta ja venttiilin dynamiikasta)
Mallin keskeiset havainnot
Luonnollisen taajuuden riippuvuus
Luonnollisen taajuuden yhtälö paljastaa, että ω_n kasvaa seuraavasti:
- Korkeampi paine (jäykempi pneumaattinen jousi)
- Suurempi mäntäpinta-ala (enemmän voimaa paineen muutosta kohti)
- Pienempi tilavuus (jäykempi jousi)
- Pienempi massa (helpompi kiihdyttää)
Volyymin vaihtelu sijainnin mukaan
Sylinterille, jonka iskunpituus on L ja mäntän pinta-ala A:
$$
V_{1}(x) = V_{dead} + A \times x
$$
$$
V_{2}(x) = V_{dead} + A \times (L – x)
$$
Jossa V_dead on kuollut tilavuus (portit, letkut, jakoputket).
Tämä sijainnista riippuvuus aiheuttaa luonnollisen taajuuden vaihtelun merkittävästi iskun aikana.
Käytännön mallinnusnäkökohdat
| Mallin monimutkaisuus | Tarkkuus | Laskenta | Käyttötapaus |
|---|---|---|---|
| Yksinkertainen 2. asteen | ±30% | Erittäin alhainen | Alustava suunnittelu, yksinkertainen PID |
| Linearisoidut 4. asteen | ±15% | Matala | Klassinen ohjaussuunnittelu |
| Epälineaarinen simulointi | ±5% | Medium | Vahvistuksen ajoitus, ennakko-ohjaus |
| CFD-pohjainen malli | ±2% | Erittäin korkea | Tutkimus, äärimmäinen tarkkuus |
Parametrien tunnistaminen
Näiden mallien käyttämiseksi tarvitset todelliset järjestelmäparametrit:
Mitatut parametrit:
- Sylinterin halkaisija ja isku (tuoteselosteesta)
- Liikkuva massa (punnitse se)
- Syöttöpaine (painemittari)
- Kuolleet tilavuudet (mittausholet ja portit)
Tunnistetut parametrit:
- Kitkakertoimet (askelvasteiden testaus)
- Venttiilin virtauskertoimet (painehäviötesti)
- Tehollinen tilavuusmoduuli (taajuusvasteen testaus)
Bepto:n mallinnustuki
Bepto tarjoaa yksityiskohtaiset pneumaattiset parametrit kaikille sauvaton sylintereilleen:
- Tarkat poraus- ja iskunmitat
- Mitatut kuollut tilavuus kullekin porttikokoonpanolle
- Tiivisteen kitkan huomioon ottavat tehokkaat mäntäalueet
- Tehdasmittausten perusteella suositellut mallinnusparametrit
Nämä tiedot säästävät viikkoja järjestelmän tunnistustyöstä ja varmistavat, että mallisi vastaavat todellisuutta. 📊
Mitkä ohjausstrategiat kompensoivat puristuvuusvaikutuksia?
Tavallinen PID-säätö ei riitä – servopneumatiikka vaatii erityisiä säätöstrategioita, joissa otetaan huomioon puristuvuus. 🎮
Tehokas servopneumaattinen ohjaus edellyttää useiden strategioiden yhdistämistä: vahvistuksen ajoitus, joka säätää ohjaimen parametreja sijainnin ja paineen perusteella vaihtelevien dynamiikkojen käsittelemiseksi, ennakoiva kompensointi, joka ennustaa tarvittavat paineet halutun kiihtyvyyden perusteella seurantavirheen vähentämiseksi, ja painepalautteen, joka sulkee sisäisen silmukan kammion paineiden ympärille tehokkaan jäykkyyden lisäämiseksi – yhdessä nämä saavuttavat 2–3-kertaisen kaistanleveyden parannuksen verrattuna yksinkertaiseen PID-ohjaukseen. Avaintekijä on käsitellä puristuvuutta tunnetuksi, kompensoituvaksi vaikutukseksi eikä tuntemattomaksi häiriötekijäksi.
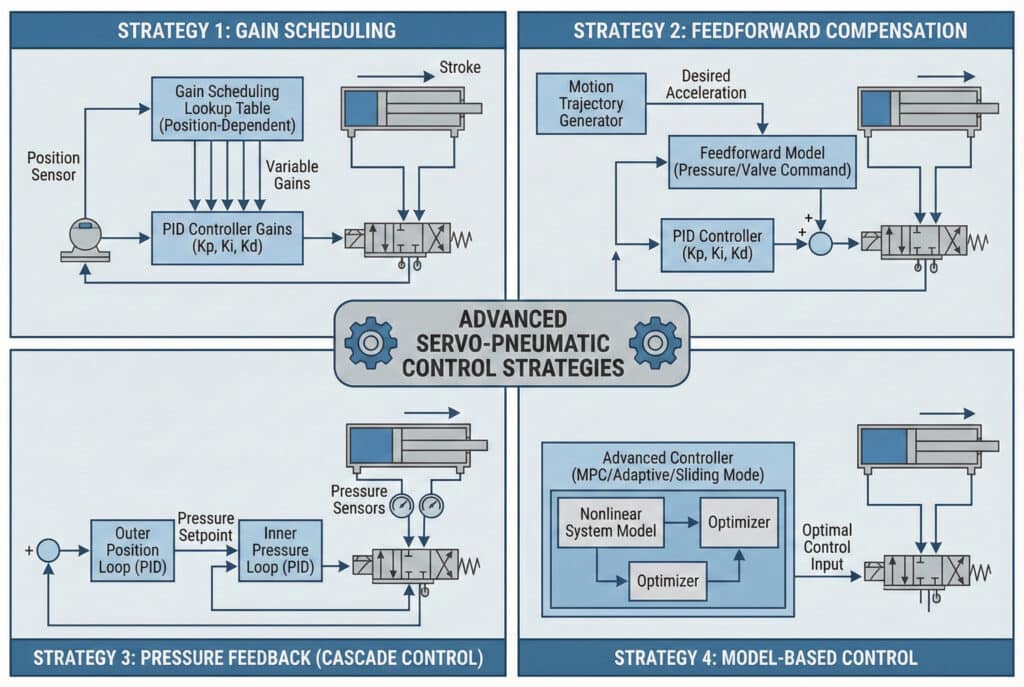
Strategia 1: Voiton aikataulutus
Koska järjestelmän dynamiikka muuttuu sijainnin mukaan, käytä sijainnista riippuvia ohjausvahvistuksia:
$$
K_{p}(x)
= K_{p0} \times \sqrt{\frac{V_{avg}}{V(x)}}
$$
Tämä kompensoi jäykkyyden vaihtelua lisäämällä vahvistusta jäykkyyden ollessa alhainen (iskun keskivaihe) ja vähentämällä vahvistusta jäykkyyden ollessa korkea (iskun loppu).
Täytäntöönpano
- Jaa isku 5–10 vyöhykkeeseen
- Säädä PID-vahvistukset kullekin vyöhykkeelle
- Interpoloi voitot nykyisen sijainnin perusteella
- Päivitä voittoja jokaisella ohjausjaksolla (tyypillisesti 1–5 ms)
Edut
- Tasainen suorituskyky koko iskun ajan
- Voi käyttää aggressiivisempia voittoja ilman epävakautta
- Kestää paremmin kuormituksen vaihteluita
Haasteet
- Vaatii tarkan sijainnin palautteen
- Alun perin monimutkaisempi virittää
- Voitonvaihtoehtojen vaihtumisen potentiaali
Strategia 2: Ennakoiva kompensointi
Ennusta tarvittavat venttiilikomennot halutun liikkeen perusteella:
$$
u_{ff}
= \frac{M \,\ddot{x}{haluttu} + F{kitka} + F_{kuorma}}
{\Delta P × A}
$$
Lisää sitten paineen ennuste:
$$
\Delta P_{vaadittu}
= \frac{M \,\ddot{x}_{haluttu}}{A}
$$
Tämä ennakoi halutun kiihtyvyyden saavuttamiseksi tarvittavat paineen muutokset, mikä vähentää seurantavirhettä merkittävästi.
Täytäntöönpano
- Erota sijaintikomento kahdesti halutun kiihtyvyyden saavuttamiseksi.
- Laske tarvittava paine-ero
- Muunna venttiilikomennoksi käyttämällä venttiilin virtausmallia
- Lisää palautteen ohjainlähtöön
Edut
- Vähentää seurantaeroa 60–80%
- Mahdollistaa nopeamman liikkeen ilman ylitystä
- Parantaa toistettavuutta
Strategia 3: Painepalautteen (kaskadiohjaus)
Toteuta kaksisilmukkainen ohjausrakenne:
Ulkoinen silmukka: Asennon ohjain tuottaa halutun paine-eron
Sisäkehä: Nopea paineensäätölaite ohjaa venttiiliä halutun paineen saavuttamiseksi.
Tämä lisää järjestelmän jäykkyyttä tehokkaasti ohjaamalla aktiivisesti pneumaattista jousta.
Täytäntöönpano
Ulompi silmukka (sijainti):
error_pos = x_haluttu – x_todellinen
ΔP_haluttu = PID_asento(virhe_pos)
Sisäpiiri (paine):
virhe_P1 = P1_haluttu – P1_todellinen
virhe_P2 = P2_haluttu – P2_todellinen
u_venttiili = PID_paine(virhe_P1, virhe_P2)
Edut
- Lisää tehokasta kaistanleveyttä 2–3-kertaiseksi
- Parempi häiriöiden torjunta
- Tasaisempi suorituskyky
Vaatimukset
- Nopeat ja tarkat paineanturit jokaisessa kammiossa
- Nopea säätöpiiri (>500 Hz)
- Laadukkaat suhteelliset venttiilit
Strategia 4: Mallipohjainen ohjaus
Käytä täyttä epälineaarista mallia edistyneeseen ohjaukseen:
Liukuvamoodiohjaus: Kestävä parametrien vaihteluille ja häiriöille
Mallipohjainen ennakoiva ohjaus (MPC)5: Optimoi tulevaisuuden aikahorisontin hallinnan
Adaptiivinen ohjaus: Säätää malliparametreja automaattisesti verkossa
Nämä edistykselliset strategiat voivat saavuttaa lähes servosähköisen suorituskyvyn, mutta vaativat huomattavaa suunnittelutyötä.
Valvontastrategian vertailu
| Strategia | Suorituskyvyn parantaminen | Toteutuksen monimutkaisuus | Laitteistovaatimukset |
|---|---|---|---|
| Perus-PID | Perustaso | Matala | Vain asentoanturi |
| Vahvistuksen aikataulutus | +30-50% | Medium | Asentotunnistin |
| Feedforward | +60-80% | Medium | Asentotunnistin |
| Painepalautetta | +100-150% | Korkea | Sijainti + 2 paineanturia |
| Mallipohjainen | +150-200% | Erittäin korkea | Useita antureita + nopea prosessori |
Käytännön viritysohjeet
Vahvistuksen aikataulutetulle PID:lle, jossa on ennakkoohjaus (sopivin ratkaisu useimpiin sovelluksiin):
- Aloita keskivaiheessa olevalla virityksellä: Säädä PID-vahvistukset 50%-iskulla, jossa dynamiikka on “keskimääräistä”.”
- Lisää ennakko-ohjaus: Toteuta kiihdytysennakkoohjaus konservatiivisella vahvistuksella (aloita lasketun arvon 50%:stä).
- Toteuta vahvistuksen ajoitus: Skaalaa suhteelliset ja derivaattavoitot sijainnin perusteella
- Iteroi: Hienosäädä jokaisella alueella keskittyen siirtymäalueisiin.
- Testaa eri olosuhteissa: Tarkista suorituskyky eri kuormilla ja nopeuksilla.
Menestystarina
Maria johtaa Texasissa toimivaa automaatioyritystä, joka valmistaa nopeita pakkauskoneita. Hänellä oli ongelmia servopneumaattisen järjestelmän kanssa, jonka piti sijoittaa pakkaukset ±1 mm:n tarkkuudella 2 m/s:n nopeudella. Tavallinen PID-säätö antoi ±4 mm:n tarkkuuden ja paljon heilahtelua.
Toteutimme kolmivaiheisen strategian:
- Vahvistuksen ajoitus sijainnin perusteella (5 vyöhykettä)
- Kiihtyvyyden ennakko (70% laskettua arvoa)
- Optimoidut Bepto-matalakitkaiset sauvaton sylinterit kitkan epävarmuuden minimoimiseksi
Tulokset olivat dramaattisia:
- Paikannustarkkuus parani ±4 mm:stä ±0,8 mm:iin
- Asettumisaika lyhentynyt 40%
- Syklin kesto lyheni 25%
- Järjestelmä vakiintui koko kuormitusalueella (0–50 kg)
Koko toteutukseen kului kaksi päivää insinöörien työaikaa, ja suorituskyvyn parantuminen mahdollisti hänelle kolmen uuden sopimuksen voittamisen, joissa vaadittiin tiukempia toleransseja. 💪
Kuinka Bepto-sauvaton sylinteri voi parantaa servopneumaattista suorituskykyä?
Sylinteri itsessään on servopneumaattisen suorituskyvyn kannalta kriittinen komponentti – eikä kaikki sylinterit ole samanlaisia. ⚙️
Bepto-sauvattomat sylinterit parantavat servopneumaattista ohjausta neljän keskeisen ominaisuuden avulla: minimoitu kuollut tilavuus, joka lisää pneumaattista jäykkyyttä ja luonnollista taajuutta 30–40%, matalakitkaiset tiivisteet, jotka vähentävät kitkan epävarmuutta ja parantavat mallin tarkkuutta, symmetrinen rakenne, joka tasapainottaa dynamiikan molempiin suuntiin, ja tarkka valmistus, joka takaa parametrien yhdenmukaisuuden koko iskun ajan – ja kaikki tämä 30% halvemmalla kuin OEM-vaihtoehdot ja toimituksella, joka kestää päiviä viikkojen sijaan. Kun taistelet puristuvuusvaikutuksia vastaan, jokainen suunnittelun yksityiskohta on tärkeä.

Suunnitteluominaisuus 1: Optimoitu kuollut tilavuus
Kuollut tilavuus on servopneumaattisen suorituskyvyn vihollinen. Se on porttien, jakoputkien ja letkujen ilmamäärä, joka ei vaikuta voimaan, mutta vaikuttaa joustavuuteen (jousimaisuuteen).
Bepto-etu:
- Integroitu porttisuunnittelu minimoi sisäiset kanavat
- Kompaktit jakoputkivaihtoehdot vähentävät ulkoista tilavuutta
- Optimoitu portin koko tasapainottaa virtauksen ja tilavuuden
Vaikutus:
- 30-40% vähemmän kuollutta tilavuutta kuin tyypillisissä sauvaton sylintereissä
- Luonnollinen taajuus kasvoi 20–30%
- Nopeampi vaste ja suurempi kaistanleveys
Tilavuuden vertailu
| Konfigurointi | Kammion kuollut tilavuus | Luonnollinen taajuus (tyypillinen) |
|---|---|---|
| Vakiomallinen sauvaton + vakiomalliset portit | 150–200 cm³ | 5–7 Hz |
| Vakiomallinen sauvaton + optimoidut portit | 100–150 cm³ | 7–9 Hz |
| Bepto Rodless + integroidut portit | 60–100 cm³ | 9–12 Hz |
Suunnitteluominaisuus 2: Matalan kitkan tiivisteet
Kitka on suurin mallin epävarmuuden lähde servopneumatiikassa. Suuri tai epätasainen kitka tekee ennakoivasta kompensointista tehottoman ja vaatii suuria takaisinkytkentävahvistuksia (jotka vähentävät vakauden marginaaleja).
Bepto-etu:
- Kehittyneet polyuretaanitiivisteet kitkanmuokkaimilla
- 40%:n irtoamiskitka on pienempi kuin tavallisissa tiivisteissä
- Tasaisempi kitka eri lämpötiloissa ja nopeuksilla
- Pidempi käyttöikä (yli 10 miljoonaa latauskertaa) säilyttää suorituskyvyn
Vaikutus:
- Tarkempi voiman ennustaminen (±5% vs. ±15%)
- Parempi ennakoiva suorituskyky
- Pienemmät vaaditut takaisinkytkentävahvistukset
- Vähentynyt tarttumis-liukumiskäyttäytyminen
Suunnitteluominaisuus 3: Symmetrinen muotoilu
Monissa sauvaton sylintereissä on epäsymmetrinen sisäinen geometria, joka aiheuttaa erilaisen dynamiikan kummassakin suunnassa. Tämä kaksinkertaistaa ohjauksen säätämiseen tarvittavan työn.
Bepto-etu:
- Symmetrinen porttien sijoittelu ja mitoitus
- Tasapainoinen tiivisteen kitka molempiin suuntiin
- Yhtäläiset teholliset pinta-alat (ei sauvan pinta-alan eroa)
Vaikutus:
- Yksi ohjausvahvistussarja toimii molempiin suuntiin
- Yksinkertaistettu vahvistuksen ajoitus
- Ennakoitavampi käyttäytyminen
Suunnitteluominaisuus 4: Tarkkuusvalmistus
Servopneumaattinen ohjaus perustuu tarkkoihin malleihin. Valmistusvaihtelut aiheuttavat mallien epäsuhtaa, mikä heikentää suorituskykyä.
Bepto-etu:
- Reiän toleranssi: H7 (±0,015 mm 50 mm:n reiälle)
- Ohjainkiskon suoruus: 0,02 mm/m
- Yhdenmukainen tiivisteen puristus koko tuotannon ajan
- Vastaavat laakerisarjat
Vaikutus:
- Mallit vastaavat todellisuutta 5–10%:n tarkkuudella.
- Yhdenmukainen suorituskyky yksiköittäin
- Lyhentynyt käyttöönottoaika
Järjestelmätason edut
Kun yhdistät nämä ominaisuudet täydelliseksi servopneumaattiseksi järjestelmäksi:
| Suorituskykymittari | Vakiosylinteri | Bepto-sauvaton sylinteri | Parannus |
|---|---|---|---|
| Luonnollinen taajuus | 6 Hz | 10 Hz | +67% |
| Saavutettavissa oleva kaistanleveys | 2 Hz | 4 Hz | +100% |
| Paikannustarkkuus | ±2mm | ±0.8mm | +60% |
| Asettumisaika | 400 ms | 200ms | -50% |
| Mallin tarkkuus | ±15% | ±5% | +67% |
| Kitkan vaihtelu | ±20% | ±8% | +60% |
Sovellustekniikan tuki
Kun valitset Bepto servopneumaattisiin sovelluksiin, saat enemmän kuin vain sylinterin:
✅ Yksityiskohtaiset pneumaattiset parametrit tarkan mallinnuksen varten
✅ Ilmainen ohjausstrategian konsultointi (Se olen minä ja tiimini! 👋)
✅ Suositeltava venttiilin koko optimaalista suorituskykyä varten
✅ Esimerkkiohjauskoodi yleisille PLC-laitteille
✅ Sovelluskohtainen testaus tarkista suorituskyky ennen sitoutumista
Kustannustehokkuusanalyysi
Vertaillaan järjestelmän kokonaiskustannuksia ja suorituskykyä:
Vaihtoehto A: Premium-OEM-sylinteri + vakiokontrolli
- Sylinterin hinta: $2 500
- Ohjaustekniikka: 40 tuntia @ $100/tunti = $4 000
- Suorituskyky: ±2 mm, 2 Hz kaistanleveys
- Yhteensä: $6 500
Vaihtoehto B: Bepto-sylinteri + optimoitu ohjaus
- Sylinterin hinta: $1 750 (30% vähemmän)
- Ohjaustekniikka: 24 tuntia @ $100/tunti = $2 400 (vähemmän säätöä tarvitaan)
- Suorituskyky: ±0,8 mm, 4 Hz kaistanleveys
- Yhteensä: $4 150
Säästöt: $2,350 (36%) ja parempi suorituskyky 💰
Miksi servopneumaattiset integraattorit valitsevat Bepto
Ymmärrämme, että servopneumaattinen ohjaus on haastavaa. Ilman puristuvuus on perustavanlaatuinen fysiikan ongelma, jota ei voida poistaa, mutta sitä voidaan minimoida ja kompensoida. Vartimattomat sylinterimme on suunniteltu erityisesti vähentämään ohjausta vaikeuttavia puristuvuusvaikutuksia:
- Suurempi jäykkyys vähentyneen kuolleen tilavuuden kautta
- Ennakoitavampi kitka edistyneiden tiivisteiden avulla
- Parempi mallin tarkkuus tarkalla valmistuksella
- Nopeampi toimitus (3–5 päivää), jotta voit toistaa nopeasti
- Pienemmät kustannukset jotta voit hankkia parempia venttiilejä ja antureita
Kun rakennat servopneumaattista järjestelmää, sylinteri on sen perusta. Rakennettaessa vankalle perustalle kaikki muu sujuu helpommin. 🎯
Päätelmä
Ilman puristuvuuden hallinta tarkalla mallinnuksella ja edistyneillä ohjausstrategioilla yhdistettynä optimoituun sylinterisuunnitteluun muuttaa servopneumatiikan turhauttavasta kompromissista kustannustehokkaaksi, suorituskykyiseksi ratkaisuksi, joka kilpailee servosähköisten järjestelmien kanssa monissa sovelluksissa. 🚀
Usein kysyttyjä kysymyksiä servopneumaattisen ohjauksen puristuvuudesta
Miksi en voi käyttää korkeampaa painetta kompressiivisyyden vaikutusten poistamiseksi?
Korkeampi paine lisää pneumaattista jäykkyyttä ja luonnollista taajuutta, mikä parantaa suorituskykyä 20–30%, mutta se ei poista puristuvuutta, koska paineen ja tilavuuden suhde pysyy epälineaarisena, ja korkeampi paine lisää myös kitkavoimia ja tiivisteiden kulumista. Ajattele sitä kuin jousen kiristämistä – se muuttuu jäykemmäksi, mutta se on edelleen jousi, ei jäykkä liitos. Lisäksi useimmat teolliset pneumaattiset järjestelmät ovat infrastruktuurin ja turvallisuusnäkökohtien vuoksi rajoitettuja 6–8 barin syöttöpaineeseen. Parempi lähestymistapa on minimoida tilavuus ja käyttää edistyneitä ohjausstrategioita sen sijaan, että vain lisättäisiin painetta.
Miten servopneumaattinen suorituskyky vertautuu servosähköiseen suorituskykyyn asemointisovelluksissa?
Servopneumatiikka saavuttaa tyypillisesti 1–5 Hz:n ohjauskaistanleveyden ja ±0,5–2 mm:n paikannustarkkuuden, kun taas servosähköinen järjestelmä saavuttaa 10–30 Hz:n kaistanleveyden ja ±0,01–0,1 mm:n tarkkuuden. Servopneumatiikka on kuitenkin 40–60% halvempaa, tarjoaa luontaisen joustavuuden turvalliseen ihmisten kanssa tapahtuvaan vuorovaikutukseen ja tarjoaa yksinkertaisemman ylikuormitussuojan. Sovelluksissa, joissa vaaditaan alle millimetrin tarkkuutta tai suurta kaistanleveyttä, servosähköinen järjestelmä on parempi vaihtoehto. Sovelluksissa, joissa ±1 mm:n tarkkuus ja kohtalainen nopeus riittävät, optimoitu servopneumaattinen järjestelmä tarjoaa erinomaisen vastineen rahalle. Tärkeintä on sovittaa tekniikka todellisiin vaatimuksiin, ei ylimitoittaa sitä. 🎯
Voinko jälkiasentaa servo-ohjauksen olemassa oleviin pneumaattisiin sylintereihin?
Voit lisätä servo-ohjauksen olemassa oleviin sylintereihin, mutta suorituskykyä rajoittavat sylinterin kuollut tilavuus, kitkaominaisuudet ja valmistustoleranssit. Tyypillisesti saavutetaan vain 50–70 % servosovelluksiin suunniteltujen sylinterien suorituskyvystä. Jos olet tekemässä jälkiasennusta, keskity ulkoisen kuolleen tilavuuden minimoimiseen (lyhyet letkut, kompaktit jakotukit), vahvistuksen ajoituksen käyttöönottoon sijainnista riippuvien dynamiikkojen käsittelemiseksi ja painepalautteen käyttöön, jos mahdollista. Jos kuitenkin suunnittelet uutta järjestelmää, servo-optimoitujen sylinterien, kuten Bepto:n sauvaton sarja, määrittäminen alusta alkaen säästää huomattavasti suunnitteluaikaa ja tuottaa parempia tuloksia.
Mikä näytteenottotaajuus tarvitaan tehokkaaseen servopneumaattiseen ohjaukseen?
Perusasennon ohjaus vaatii 100–200 Hz:n näytteenottotaajuuden, kun taas edistyneet strategiat, joissa käytetään painepalautetta, vaativat 500–1000 Hz:n taajuuden, jotta nopeaa pneumaattista dynamiikkaa voidaan ohjata tehokkaasti ja saavuttaa optimaalinen suorituskyky. Ulompi sijaintisilmukka voi toimia hitaammin (100–200 Hz), mutta jos otat käyttöön painepalautteen (kaskadiohjaus), sisemmän paineilmapiirin on toimittava vähintään 500 Hz:n taajuudella pneumaattisen resonanssin hallitsemiseksi. Useimmat nykyaikaiset PLC-ohjaimet ja liikkeenohjaimet saavuttavat nämä taajuudet helposti. Älä yritä ottaa käyttöön servopneumaattista ohjausta 50 Hz:n PLC-skannauksessa, sillä joudut jatkuvasti kamppailemaan vakauden kanssa.
Miksi minun pitäisi valita Bepto-sauvaton sylinteri servopneumaattiseen sovellukseeni?
Bepto-sauvattomat sylinterit tarjoavat 30–40% korkeamman ominaisvärähtelytaajuuden minimoidun kuolleen tilavuuden ansiosta, 40% pienemmän kitkan paremman mallitarkkuuden saavuttamiseksi ja tarkkuuden valmistuksen tasaisen suorituskyvyn takaamiseksi – kaikki tämä 30% alhaisemmilla kustannuksilla kuin OEM-vaihtoehdot, 3–5 päivän toimitusajalla ja ilmaisella sovellusten suunnittelutukella. Kun otat käyttöön servopneumaattisen ohjauksen, sylinterin rakenne vaikuttaa suoraan saavutettavaan suorituskykyyn ja tarvittavaan suunnittelutyöhön. Sylinterimme on optimoitu erityisesti servosovelluksiin, ja niissä on tarkat pneumaattiset parametrit tarkkaa mallinnusta varten. Lisäksi tekninen tiimimme (mukaan lukien minä! 👋) tarjoaa ilmaista neuvontaa ohjausstrategioista, venttiilien mitoituksesta ja järjestelmän optimoinnista. Olemme auttaneet kymmeniä integraattoreita saavuttamaan suorituskykytavoitteensa nopeammin ja edullisemmin – anna meidän auttaa myös sinua! 💪
-
Tarkista kaasujen paineen, tilavuuden ja lämpötilan välistä suhdetta kuvaava termodynaamisen yhtälön perusperiaate. ↩
-
Ymmärrä termodynaaminen indeksi, joka kuvaa lämmönsiirtoa puristus- ja laajenemisprosessien aikana. ↩
-
Tutustu tähän lineaariseen parametrien vaihteluun perustuvaan ohjaustekniikkaan, jota käytetään muuttuvan dynamiikan järjestelmien käsittelyssä. ↩
-
Opi, kuinka matemaattiset funktiot kuvaavat syötteen ja tuloksen välistä suhdetta lineaarisissa aikainvarianttisissa järjestelmissä. ↩
-
Tutustu edistyneisiin ohjausmenetelmiin, joissa käytetään dynaamisia prosessimalleja tulevien ohjaustoimenpiteiden optimoimiseksi. ↩
