

はじめに
スマート空圧シリンダーのアプリケーションに最適な制御戦略の選択にお困りではありませんか?🤔多くのエンジニアが力制御モードと位置制御モードの選択に迷い、その結果として性能の低下、製品損傷、非効率なプロセスを招いています。誤った選択は、スムーズな動作と高額な故障の差を意味する可能性があります。.
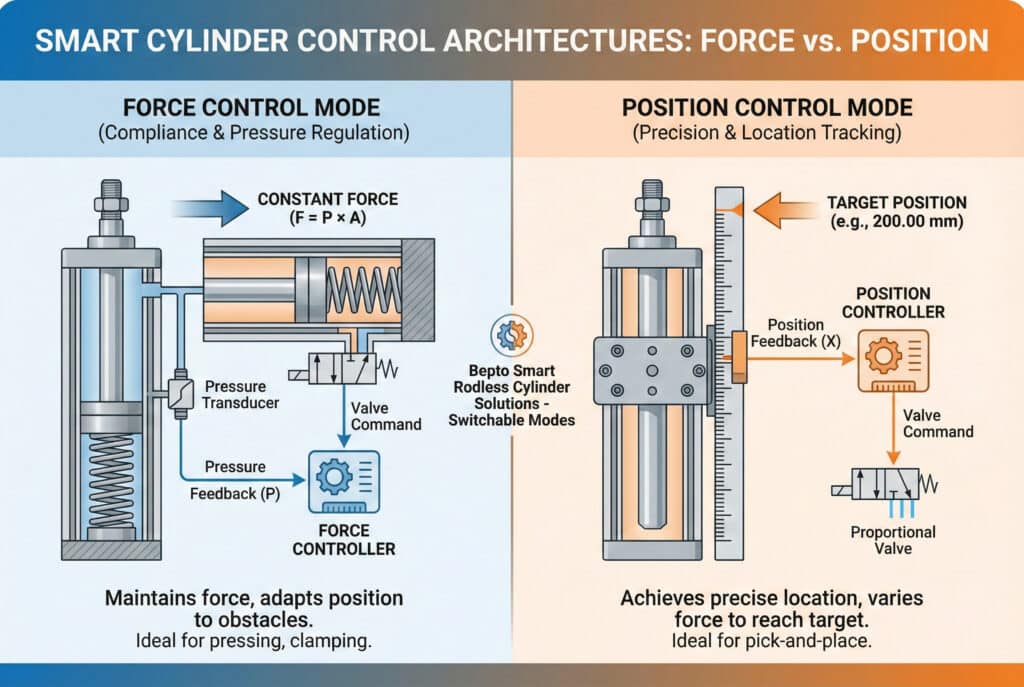
力制御モードは、スマートシリンダの圧力または出力力を調整し、位置に関係なく一定の押す/引く力を維持します。プレス、クランプ、組立作業に最適です。位置制御モードは、ストロークに沿ったキャリッジの正確な位置の達成と維持に重点を置き、ピックアンドプレイス、選別、位置決めタスクに最適です。選択は、アプリケーションがシリンダの作用における「力の強さ」と「正確な位置」のどちらを優先するかによって決まります。.
先月、オハイオ州クリーブランドの自動車組立工場でプロセスエンジニアを務めるレイチェルと相談しました。彼女のチームはドアパネル取り付け工程で位置制御を使用していましたが、力のかけ方が不均一なためパネルにひび割れが発生していました。ベプト社のスマートロッドレスシリンダーを圧力フィードバック付き力制御モードに切り替えたところ、不良率が8%から0.5%未満に低下しました。各モードの使用タイミングを理解することが、アプリケーション成功の鍵となります。 💡
目次
- 力制御と位置制御の根本的な違いは何ですか?
- 空気圧アプリケーションにおいて、フォースコントロールモードはいつ使用すべきか?
- 位置制御モードはいつがより良い選択か?
- ハイブリッドアプリケーションにおいて、両方の制御モードを組み合わせることは可能ですか?
力制御と位置制御の根本的な違いは何ですか?
これらの制御哲学の根本的な違いを理解することは、適切なアプリケーションエンジニアリングに不可欠である。⚙️
力制御モードは圧力センサーまたは電流監視を用いてシリンダーの出力力を調整し、位置が変化したり障害物に遭遇したりしても一定の押力/引力を維持します。位置制御モードは リニアエンコーダ1 または磁気センサーを用いてキャリッジ位置を追跡・制御し、通常0.01~0.5mmの精度で、力の一貫性よりも正確な位置決めを優先します。各モードはアプリケーション要件に基づき、異なる性能パラメータを最適化します。.
制御ループの基礎
力制御アーキテクチャ
力制御モードでは、システムは継続的に監視します:
- 圧力センサー測定室圧力をリアルタイムで計測する
- 力計算F = P × A (圧力 × ピストン面積)
- フィードバックループバルブ位置を調整し、目標力を維持する
- コンプライアンス: シリンダーの位置はワークピースの特性に基づいて変化する
コントローラーはシリンダーの位置を気にしない——正しい力を加えているかどうかだけが重要だ。.
位置制御アーキテクチャ
位置制御システムは位置に焦点を当てる:
- リニアエンコーダ: 絶対位置または増分位置を追跡する
- 位置誤差目標値との差を計算する
- 速度プロファイリング加速と減速を制御する
- 力変化出力力は負荷と摩擦に基づいて変化する
主要な性能比較
| 特性 | 力制御 | 位置制御 |
|---|---|---|
| 一次フィードバック | 圧力/力 | 位置/場所 |
| 標準精度 | ±2-5%の目標力 | ±0.01~0.5mm |
| 障害への対応 | 力を維持し、動きを止める | 位置に到達する力を増加させる |
| コンプライアンスに最適 | 素晴らしい | 貧しい |
| 再現性 | 力:優れている位置:可変 | 位置:良好/力:可変 |
| システムコスト | 中程度 | 中~高 |
ベプトでは、両方の制御モードを備えたスマートなロッドレスシリンダーソリューションを提供し、エンジニアが特定の用途に最適な戦略を選択できるようにしています。当社のシステムは、同一サイクル内の異なるフェーズでモードを切り替えることさえ可能です。🔄
センサー要件
力制御の必要性:
- 圧力トランスデューサ(標準範囲:0~10バール)
- 比例弁またはサーボ弁2 精密な圧力調整のため
- 高速制御ループ(1~5ミリ秒のサイクルタイム)
位置制御の必要性:
- 直線位置センサ(磁気式、光学式、または磁歪式)
- 高分解能フィードバック(0.01~0.1mm)
- 滑らかな加速のための予測運動プロファイル
空気圧アプリケーションにおいて、フォースコントロールモードはいつ使用すべきか?
特定のアプリケーションでは、品質と安全性の観点から、力制御が絶対に必要です。🛡️
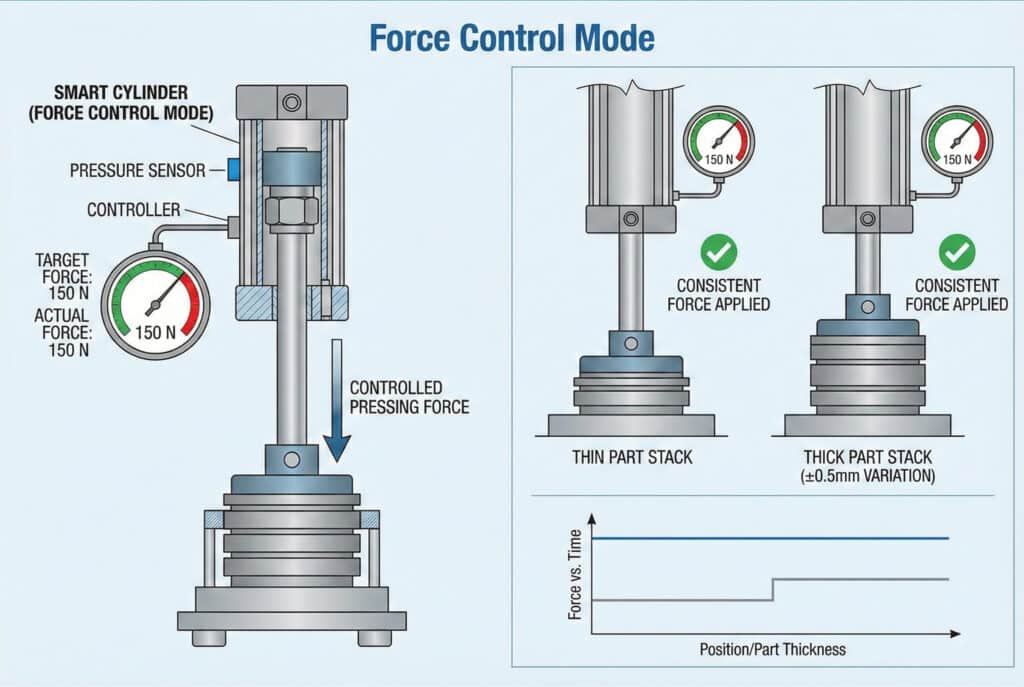
力制御モードは、以下の要件を満たす用途に特に優れています:部品の厚み変動(±0.5mm公差)にかかわらず一貫した押圧力を必要とする場合過剰な力が損傷を引き起こす順応性のある組立作業測定を行う品質保証試験 力-変位曲線3, 繊細な製品のソフトタッチ材料処理、およびワークピースの特性が変動する適応プロセス。「正確な位置」よりも「力の強さ」が重要なあらゆる用途において、力制御が効果を発揮します。.
理想的な力制御アプリケーション
組立およびプレス加工
圧入組立ベアリング、ブッシング、またはコネクターの挿入には、損傷を防ぐために制御された力が必要です。力制御により、過度の圧入なしに一貫した挿入が保証されます。.
スナップフィット組立プラスチック部品は、破損せずにクリップを嵌合させるために精密な力が必要です。力制御は、欠陥を防ぐ「感触」を提供します。.
接着剤吐出圧力ディスペンシングピストンに一定の力を維持することで、粘度の変化にかかわらず均一な材料の流れを確保します。.
実社会での成功事例
カリフォルニア州サンノゼの家電製品製造施設で生産管理者を務めるトーマスは、スマートフォン部品組立工程で12%の不良率に直面していた。位置制御シリンダーが部品を所定の深さまで押し込むが、部品の厚みばらつきにより、一部の部品には力が不足し、他方では過剰な力で割れる現象が発生していた。 ベプト社の力制御式ロッドレスシリンダー(150N設定)に切り替えたところ、工程が部品のばらつきに自動適応。不良率は0.8%に低下し、サイクルタイムは0.2秒短縮された。📱
力制御の利点
- 変化に適応する: 部品の欠陥を自動的に補正します 公差積み重ね4
- 損傷を防ぐ目標値に達すると力の増加を停止する
- 品質に関するフィードバックフォースデータはプロセス監視機能を提供します
- 丁寧な取り扱い: 壊れやすい素材(ガラス、陶磁器、電子機器)に最適
アプリケーションカテゴリ
| 産業 | 典型的な応用例 | 目標射程距離 | 主な利点 |
|---|---|---|---|
| 自動車 | ウェザーストリップの取り付け | 50-200N | 損傷のない安定したシール |
| 電子機器 | プリント基板部品挿入 | 10-80N | 板のひび割れを防止します |
| 包装 | 段ボールの封緘 | 100-400N | 充填レベルの変化に適応する |
| 医療機器 | カテーテルアセンブリ | 5-30N | 変形なく完全性を確保する |
| 食品加工 | 製品のプレス加工/成形 | 50~500N | 均一密度制御 |
位置制御モードはいつがより良い選択か?
位置制御は、位置精度が最優先される用途において支配的な役割を果たす。🎯
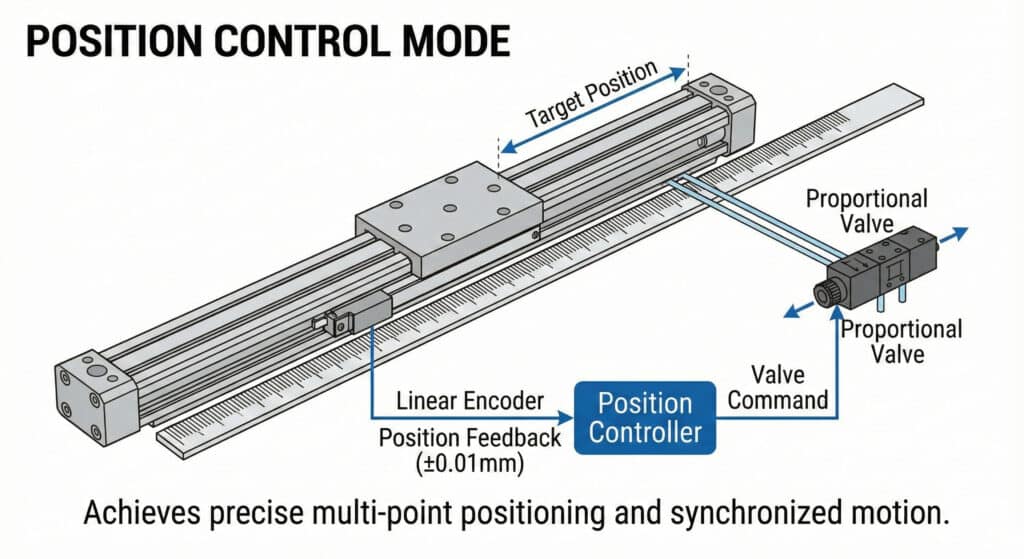
位置制御モードは、以下の場合に不可欠です:・±0.1mm以内の絶対位置決め精度が要求される場合・ストロークに沿った複数の停止位置が必要な場合・他軸との同期動作が極めて重要である場合・高速ポイントツーポイント移動に最適化された速度プロファイルが求められる場合・ピッキング、配置、選別、精密な材料移送を伴うアプリケーションの場合負荷変動にかかわらず再現性のある位置決めを必要とする製造プロセスは、位置制御によって最大の恩恵を受けます。.
位置制御の卓越領域
ピックアンドプレース操作
ロボットによる組立と材料運搬では、シリンダーが正確な位置へ繰り返し移動する必要がある:
- 多位置ストッパー1つのシリンダーがストローク中に複数のステーションにサービスを提供する
- 同期動作コンベア、ロボット、またはその他の軸と連携する
- 高速精度: 2m/s以上の速度でも精度を維持する
精密位置決めアプリケーション
CNC工作機械の積載加工精度を確保するため、ワークピースは0.05mm以内で位置合わせを行う必要がある
光学アセンブリレンズ位置決めには、焦点品質を確保するため0.1mm未満の繰り返し精度が必要である
検査システムカメラの位置は画像解析のため一貫した設置場所が必要である
動作プロファイル最適化
位置制御により高度な動作戦略が可能となる:
位置制御の利点
- 絶対的な正確さ: ターゲットを数マイクロン単位で到達する
- マルチポイント対応ストローク長に沿った無制限の停止位置
- 予測可能なタイミングサイクルタイムの一貫性によるスループット計画
- 同期複雑な多軸運動を調整する
標準仕様
位置制御機能を備えた現代的なスマートロッドレスシリンダーは以下を実現します:
- 位置決め精度±0.05mm ~ ±0.5mm(センサーにより異なる)
- 再現性磁歪式システムの場合:±0.01mm
- 最大速度2-3 m/s で制御された減速
- 決議0.01mm 以上の精度を実現するハイエンドエンコーダ
当社のBepto位置制御式ロッドレスシリンダーは、主要ブランドとの完全互換性を備え、OEM相当の性能を大幅に低コストで実現します。これまでに数十の施設において老朽化したシステムの更新を支援し、予備部品在庫コストを35%削減しました。💰
ハイブリッドアプリケーションにおいて、両方の制御モードを組み合わせることは可能ですか?
高度なアプリケーションでは、異なるサイクルフェーズにおいて制御モードを切り替える必要がある場合が多い。🔀
ハイブリッド力-位置制御により、スマートシリンダーは急速な接近動作には位置制御を使用し、実際の作業工程では力制御に切り替え、後退時には位置制御に戻る。この組み合わせにより、最適なサイクルタイム(高速位置決め)と品質保証(制御された力の適用)を実現する。実装には、圧力センサーと位置センサーの両方を備えたシリンダーに加え、10~50ミリ秒以内のモード切り替えが可能なコントローラーが必要である。.

ハイブリッド制御戦略
順次モード切替
フェーズ1 – 急接近(位置制御):
- 素早く接近位置へ移動する
- 高速(1.5~2 m/s)によるサイクルタイム最適化
- ワークピース接触の5mm手前で停止
フェーズ2 – 作業操作(力制御):
- 強制制御モードに切り替える
- 制御された圧着/組立力を加える
- 品質管理のための力-変位曲線の監視
フェーズ3 – 収縮(位置制御):
- ホームポジションまたは中間位置に戻る
- 次サイクル向け最適化速度プロファイル
実世界のハイブリッドアプリケーション
ミネソタ州ミネアポリスにある医療機器メーカーは、カテーテル先端アセンブリにこの戦略を正確に採用している。Beptoスマートシリンダーは0.4秒でアセンブリステーションへ高速位置決め(位置決めモード)し、フォースモードに切り替えて先端のヒートステイキングに正確に18Nの力を加える(0.6秒)。その後、位置制御下で後退する(0.3秒)。総サイクル時間:1.3秒。200万サイクル以上で不良ゼロを達成。 🏥
実装要件
| コンポーネント | 仕様 | 目的 |
|---|---|---|
| デュアルセンサー | 圧力+位置 | 両方の制御モードを有効にする |
| 高速コントローラ | 10ミリ秒未満モード切替 | シームレスな移行 |
| サーボ/比例弁 | 高周波応答 | 両方の制御タイプをサポートします |
| 高度なソフトウェア | ステートマシン論理 | モード遷移を管理する |
ハイブリッドアプローチの利点
- 最適化されたサイクルタイム: 精度が重要でない素早い動き
- 品質保証必要な箇所に制御された力を
- プロセス監視位置データと力データの両方が記録された
- 柔軟性: 製品バリエーションに自動的に適応する
意思決定フレームワーク
フォースコントロールを使用するタイミング:
- 部品の厚さ/高さが0.5mm以上変動する
- 材料特性に一貫性がない
- 過剰な力による損傷の可能性があります
- プロセス品質は力の適用に依存する
位置制御を使用するタイミング:
- 絶対的な位置精度は極めて重要である
- 複数の停止位置が必要です
- 他の機器との同期が必要です
- サイクルタイムの最適化には高速化が求められる
ハイブリッド制御を使用するタイミング:
- アプリケーションには明確な位置付けと動作フェーズがある
- スピードと品質の両方が極めて重要である
- プロセス監視には力と位置の両方のデータが必要である
- 予算は先進的なスマートシリンダーシステムを可能にする
結論
力制御モードと位置制御モードの選択、あるいはハイブリッド戦略の実装は、製品品質、サイクル効率、プロセス能力に直接影響を与えるため、この基本的な決定は現代の製造における空気圧システム設計において最も重要な判断の一つとなる。🚀
スマートシリンダー制御モードに関するよくある質問
Q: 既存のシリンダーに後付けで力制御や位置制御を追加することは可能ですか?
改造は現在のシリンダー設計に依存します。 標準シリンダーは位置制御用に外部位置センサー(磁気ストリップ、ドローワイヤエンコーダ)でアップグレード可能ですが、力制御にはシリンダポートへの圧力トランスデューサと比例弁制御が必要です。完全な改造費用は通常、新規スマートシリンダー価格の60~80%程度となるため、交換の方が経済的に合理的である場合が多いです。Beptoは主要OEMマウントインターフェースと互換性のある、コスト効率に優れたスマートロッドレスシリンダーの代替品を提供しています。.
Q: 力制御の精度は、空気圧の安定性にどの程度依存しますか?
力制御精度は供給圧力安定性に正比例する。なぜならF = P × Aであるため。6バールの供給圧力で±0.2バールの圧力変動が生じると、±3.3%の力変動を引き起こす。±1%の力精度を要求する重要用途では、±0.05バールの安定性を有する圧力調整器を使用し、閉ループ圧力制御を検討すること。位置制御は圧力変動の影響を受けにくい。なぜなら弁位置を調整して目標位置を達成するため、圧力に依存しないからである。.
Q: 制御モードを切り替える際の応答時間はどの程度ですか?
現代のスマートシリンダーコントローラーは、システム構成に応じて10~50ミリ秒でモードを切り替えます。実際の物理的応答(シリンダー動作の変化)には、バルブの応答時間と空圧システムのダイナミクスに基づき、さらに20~100ミリ秒を要します。頻繁なモード切り替え(1秒あたり5回以上)を必要とする用途では、性能低下を避けるため、コントローラーとバルブが高頻度動作に対応していることを確認してください。.
Q: 力制御シリンダーは位置制御シリンダーよりも多くの空気を消費しますか?
力制御は目標力を維持するため圧力を連続的に調整するため、通常10~20%多くの空気を消費します。一方、位置制御は動作時に全圧力を使用し、最小限の流量で位置を保持します。ただし、力制御は過剰加圧によるエネルギー浪費を防止するため、この差を相殺する可能性があります。実際の消費量はアプリケーションのデューティサイクルに大きく依存します。プロセスパラメータに基づく具体的な計算については、当社のBeptoエンジニアリングチームにご相談ください。.
Q: 1つのスマートシリンダーで引張力(引っ張り)と圧縮力(押し)の両方の制御は可能ですか?
はい、両チャンバーに圧力センサーを備えた高度なスマートシリンダーは、両方向の力を制御できます。これにはデュアル圧力トランスデューサと双方向力計算(ロッド面積の差を考慮した F = P₁×A₁ – P₂×A₂)が必要です。材料試験、ウェブ張力制御、双方向組立などのアプリケーションはこの機能の恩恵を受けます。標準的な実装では、コストと複雑さを抑えるため、通常は一方向(押し方向)のみの力を制御します。.
