

Įvadas
Ar jūsų greitaeigė automatizavimo linija praleidžia tikslines pozicijas ir švaisto brangų ciklo laiką? 🎯 Kai pneumatiniai slydimo mechanizmai pralenkia numatytas pozicijas arba per ilgai nusistovi, nukenčia gamybos našumas, pablogėja pozicionavimo tikslumas ir pagreitėja mechaninis nusidėvėjimas. Šios dinaminės veikimo problemos kasdien kenkia daugybei gamybos operacijų.
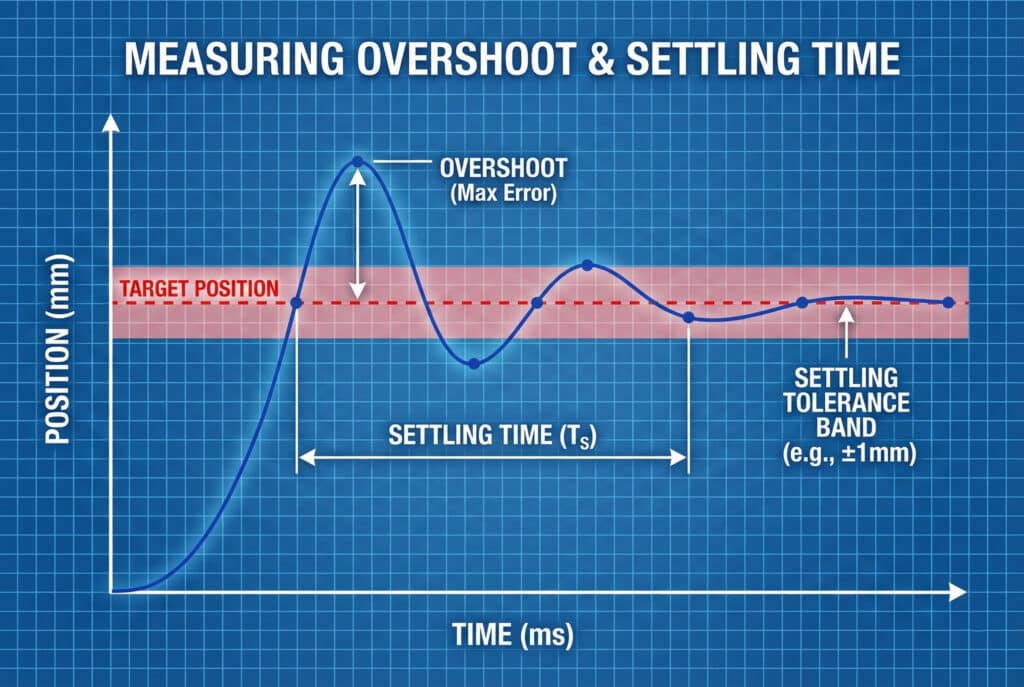
Pneumatinėse slydose perviršis atsiranda, kai vežimėlis prieš sustodamas nuvažiuoja toliau nei numatyta tikslinė padėtis, o sustojimo laikas rodo, kiek laiko sistemai reikia, kad pasiektų ir išlaikytų stabilią padėtį priimtinoje paklaidos ribose. Tipinis didelis greitis cilindras be lazdelių1 sistemos patiria 5–15 mm perviršį ir 50–200 ms stabilizavimosi laiką, tačiau tinkama amortizacija, slėgio optimizavimas ir valdymo strategijos gali juos sumažinti 60–80%.
Praėjusį ketvirtį dirbau su Marcusu, vyresniuoju automatikos inžinieriumi puslaidininkių pakavimo gamykloje Ostine, Teksase. Jo paėmimo ir padėjimo sistema patirdavo 12 mm perviršį kiekvieno 800 mm eigos pabaigoje, dėl to atsirasdavo padėties nustatymo klaidos, kurios sulėtindavo ciklo trukmę 0,3 sekundės vienai daliai. Išanalizavę jo „Bepto“ bešerdės cilindro konfigūraciją ir optimizavę amortizacijos parametrus, perviršis sumažėjo iki 3 mm, o nusistovėjimo laikas pagerėjo 65%. Leiskite man pasidalinti analitiniu požiūriu, kuris leido pasiekti šiuos rezultatus. 📊
Turinys
- Kas sukelia perviršį ir ilgesnį nusistovėjimo laiką pneumatinėse slydose?
- Kaip matuoti ir kiekybiškai įvertinti dinamiškus veiklos rodiklius?
- Kokie inžineriniai sprendimai sumažina perviršį ir pagerina nusistovėjimo laiką?
- Kaip apkrovos masė ir greitis veikia sistemos dinamiką?
Kas sukelia perviršį ir ilgesnį nusistovėjimo laiką pneumatinėse slydose?
Dinaminių našumo problemų priežasčių supratimas yra pirmasis žingsnis optimizavimo link. 🔍
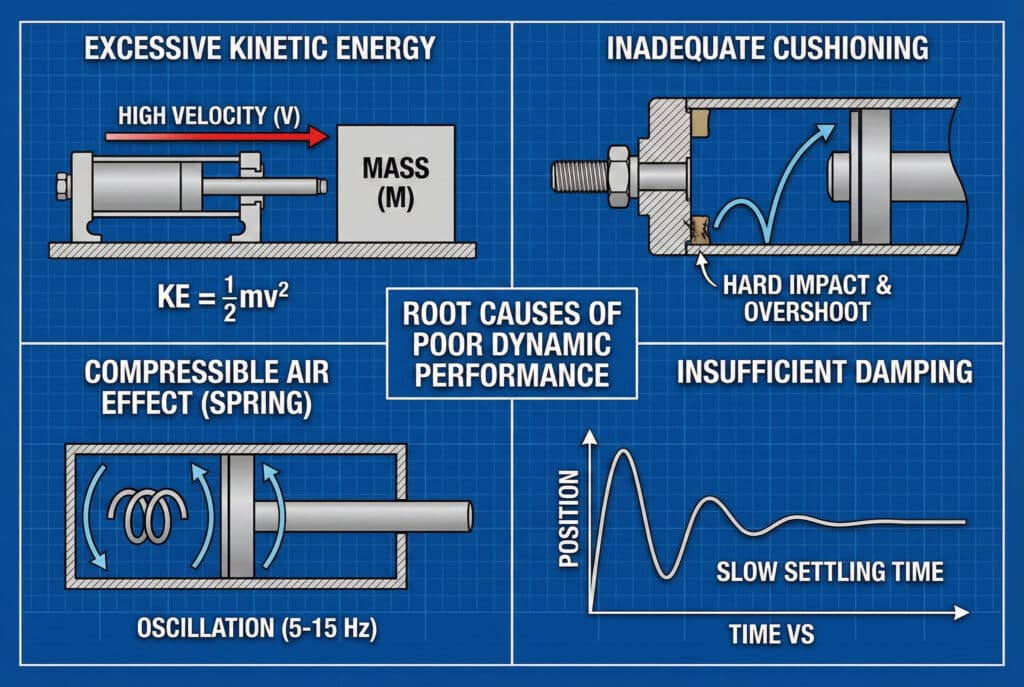
Perkėlimas ir prastas nusistovėjimo laikas atsiranda dėl keturių pagrindinių veiksnių: per didelė kinetinė energija eigoje, kuri viršija amortizacijos pajėgumą, netinkama pneumatinė amortizacija arba mechaniniai amortizatoriai, suspaudžiamas oras, veikiantis kaip spyruoklė, kuri sukelia svyravimus, ir nepakankamas slopinimas2 sistemoje, kad energija būtų greitai išsklaidyta. Judančios masės, greičio ir stabdymo atstumo sąveika lemia galutinį našumą.
Pneumatinio stabdymo fizika
Kai greitaeigis pneumatinis slydimo mechanizmas priartėja prie galutinės padėties, kinetinė energija turi būti sugėrta ir išsklaidyta. Energijos lygtis mums sako:
$$
Kinetinė energija
= \frac{1}{2} \times Masė \times Greitis^{2}
$$
Ši energija turi būti sugėrta per turimą stabdymo atstumą. Problemos kyla, kai:
- Greitis yra per didelis: Energija didėja proporcingai greičio kvadratui.
- Masė yra per didelė: Sunkesnės apkrovos turi didesnį pagreitį.
- Amortizacija yra nepakankama: Nepakankamas absorbcijos pajėgumas
- Slopinimas yra prastas: Energija virsta svyravimais, o ne šiluma.
Bendros sistemos trūkumai
| Problema | Simptomas | Tipinė priežastis |
|---|---|---|
| Kietas smūgis | Garsus sprogimas, be perviršio | Atsparumas įjungtas |
| Pernelyg didelis perviršis | >10 mm už tikslo | Per minkšta arba susidėvėjusi paminkštinimas |
| Osciliacija | Keli atšokimai | Nepakankamas slopinimas |
| Lėtas nusėdimas | >200 ms stabilizavimas | Pernelyg slopinamas arba žemas slėgis |
„Bepto“ išanalizavome šimtus greitųjų cilindrų be strypų taikymo atvejų. Dažniausiai pasitaikanti problema? Inžinieriai renkasi amortizatorių pagal katalogo rekomendacijas, neatsižvelgdami į konkrečias greičio ir apkrovos sąlygas.
Oro suspaudžiamumo poveikis
Skirtingai nuo hidraulinių sistemų, pneumatinės sistemos turi susidurti su oro suspaudžiamumu. Kai pagalvėlė įsijungia, suspaustas oras veikia kaip spyruoklė, kaupdamas energiją, kuri gali sukelti atšokimą. Slėgio ir tūrio santykis sukuria natūralius svyravimo dažnius, paprastai nuo 5 iki 15 Hz be strypo cilindrų sistemose.
Kaip matuoti ir kiekybiškai įvertinti dinamiškus veiklos rodiklius?
Tikslūs matavimai yra būtini sistemingam tobulinimui ir patvirtinimui. 📏
Norint tinkamai išmatuoti perviršį ir stabilizavimosi laiką, reikia: aukštos skiriamosios gebos padėties jutiklio (mažiausiai 0,1 mm skiriamoji geba), duomenų surinkimo 1 kHz arba didesniu dažniu, aiškaus stabilizavimosi tolerancijos apibrėžimo (paprastai nuo ±0,5 mm iki ±2 mm) ir keleto bandymų vienodomis sąlygomis. Perviršis matuojamas kaip didžiausia padėties paklaida, viršijanti tikslą, o stabilizavimosi laikas – tai laikas, per kurį sistema patenka į tolerancijos ribas ir jose išlieka.
Matavimo įranga ir nustatymas
Būtini prietaisai
- Linijiniai koderiai3: Magnetinis arba optinis, 0,01–0,1 mm skiriamoji geba
- Lazeriniai poslinkio jutikliai: Bekontaktis, mikrosekundės reakcijos laikas
- Traukiamieji jutikliai: Ekonomiškas ilgesniems smūgiams
- Duomenų surinkimo sistema: PLC greitaeigiai skaitikliai arba specializuoti DAQ
Pagrindiniai veiklos rodikliai
Peršokimas (OS): Maksimali padėtis už tikslo ribų
- Formulė: OS = (aukščiausia pozicija – tikslinė pozicija)
- Priimtinas diapazonas: 2–5 mm daugumai pramoninių taikymų
- Kritinės taikomosios programos: <1 mm
Nustatymo laikas (Ts): Laikas pasiekti ir išlaikyti toleranciją
- Matuojama nuo stabdymo pradžios iki galutinės stabilios padėties
- Pramonės standartas: ±2% nuo eigo ilgio
- Aukštos kokybės tikslas: <100 ms esant 500 mm eigai
Didžiausias lėtėjimas: Maksimalus neigiamas pagreitis stabdant
- Matoma g jėgomis (1 g = 9,81 m/s²)
- Tipinis diapazonas: 2–5 g pramoninei įrangai
- Pernelyg didelės vertės (>8 g) rodo galimą mechaninį pažeidimą.
Testavimo protokolo geriausios praktikos pavyzdžiai
Jennifer, kokybės inžinierė medicinos prietaisų gamintojo įmonėje Bostone, Masačusetse, susidūrė su problemomis dėl nevienodo padėties nustatymo savo surinkimo linijoje. Kai padėjome jai įgyvendinti struktūrizuotą matavimo protokolą – atlikti 50 bandymų ciklų kiekvienu iš trijų greičių su statistine analize – ji atrado, kad temperatūros svyravimai per dieną darė įtaką 40% pagalvės veikimui. Remdamiesi šiais duomenimis, mes nurodėme temperatūros kompensuojamą pagalvę, kuri užtikrino pastovų veikimą. 🌡️
Kokie inžineriniai sprendimai sumažina perviršį ir pagerina nusistovėjimo laiką?
Yra keletas patikrintų strategijų, kaip sistemingai optimizuoti dinaminį našumą. ⚙️
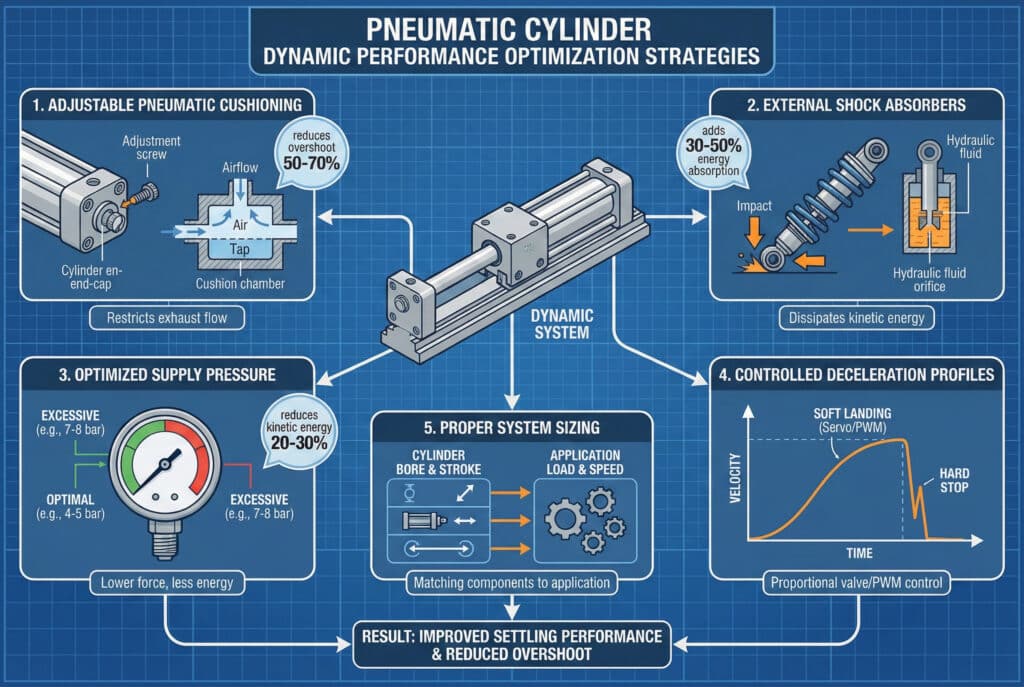
Penki pagrindiniai sprendimai pagerina nusistovėjimo charakteristikas: reguliuojama pneumatinė amortizacija (veiksmingiausia, sumažina perviršį 50–70%), išoriniai amortizatoriai (padidina energijos absorbciją 30–50%), optimizuotas tiekimo slėgis (sumažina kinetinę energiją 20–30%), kontroliuojami lėtėjimo profiliai naudojant servoventilius arba PWM valdymas4 (leidžia atlikti švelnų nusileidimą) ir tinkamą sistemos dydžio parinkimą (cilindro skersmens ir eigos pritaikymą prie taikymo). Geriausi rezultatai pasiekiami derinant kelis metodus.
Pneumatinės amortizacijos optimizavimas
Šiuolaikiniai cilindrai be strypo turi reguliuojamą amortizaciją, kuri riboja išmetamo oro srautą per paskutinius 10–30 mm eigos. Tinkamas reguliavimas yra labai svarbus:
Amortizacijos reguliavimo procedūra
- Pradėti visiškai uždarytą: Maksimalus apribojimas
- Paleisti bandymo ciklą: Stebėkite perviršį ir nusistovėjimą
- Atidaryti 1/4 apsisukimo: Šiek tiek sumažinti apribojimus
- Pakartotinis testavimas: Raskite optimalų pusiausvyrą
- Dokumento nustatymas: Įrašo posūkiai iš uždarytos padėties
Tikslas: Minimalus perviršis (2–3 mm) su greičiausiu nusistovėjimu (<100 ms)
Išorinio amortizatoriaus pasirinkimas
Kai įmontuota amortizacija pasirodo esanti nepakankama, išoriniai amortizatoriai suteikia papildomą energijos sugėrimą:
| Amortizatoriaus tipas | Energijos pajėgumas | Reguliavimas | Išlaidos | Geriausia paraiška |
|---|---|---|---|---|
| Savaiminis reguliavimas | Vidutinis | Automatinis | Aukštas | Kintamos apkrovos |
| Reguliuojamas angos skersmuo | Vidutinio ir aukšto lygio | Rankinis | Vidutinis | Fiksuotos apkrovos |
| Sunkiosios pramonės | Labai aukštas | Rankinis | Labai aukštas | Ekstremalios sąlygos |
| Elastomeriniai buferiai | Žemas | Nėra | Žemas | Lengvasis atsarginis |
Išplėstinės valdymo strategijos
Jei reikalingas išskirtinis našumas, apsvarstykite:
- Proporcinis vožtuvas5 kontrolė: Laipsniškas slėgio mažinimas artėjant
- PWM lėtėjimo profiliai: Skaitmeninis stabdymo charakteristikų valdymas
- Padėties grįžtamojo ryšio kilpos: Realaus laiko koregavimas pagal faktinę padėtį
- Slėgio jutiklis: Prisitaikanti kontrolė, pagrįsta apkrovos sąlygomis
Mūsų „Bepto“ inžinierių komanda padeda klientams įgyvendinti šiuos sprendimus, siūlydama suderinamus cilindrus be strypų, kurie dažnai pasiekia arba viršija OEM specifikacijas, o jų kaina yra 30–40% mažesnė.
Kaip apkrovos masė ir greitis veikia sistemos dinamiką?
Masa, greitis ir dinaminės charakteristikos yra susiję pagal nuspėjamus inžinerijos principus. 📐
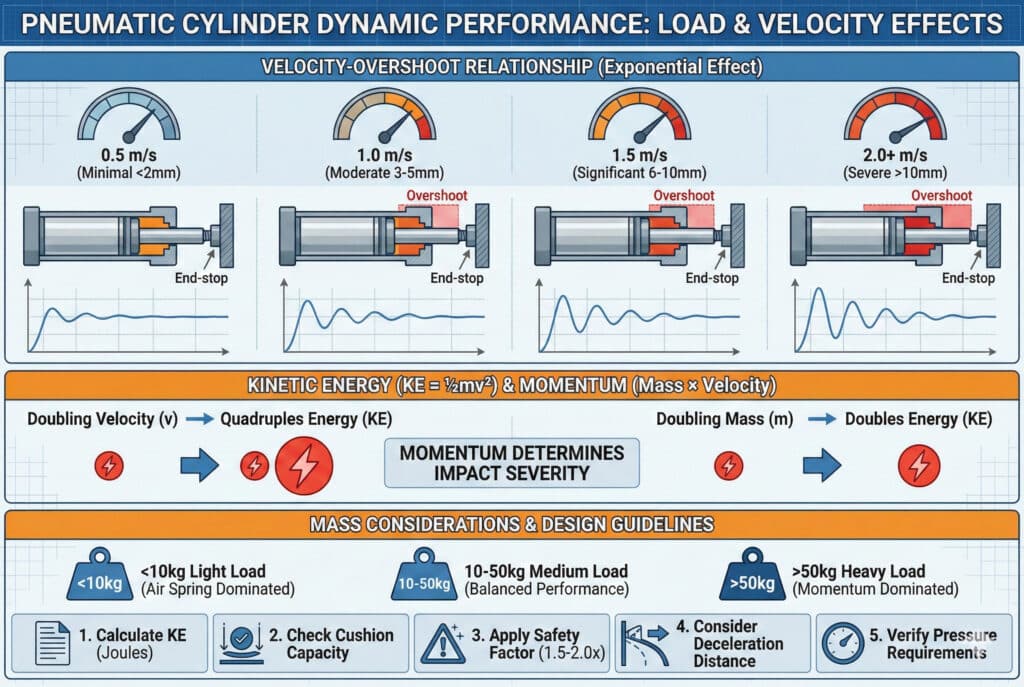
Krovinio masė ir greitis turi eksponentinį poveikį perviršio ir nusistovėjimo laikui: padvigubėjus greičiui, kinetinė energija padidėja keturis kartus, todėl reikia keturis kartus didesnės amortizacijos galios, o padvigubėjus masei, energija padidėja linijiniu būdu. Kritinis parametras yra impulsas (masė × greitis), kuris nulemia smūgio stiprumą. Sistemos, veikiančios greičiu virš 2 m/s su kroviniais, viršijančiais 50 kg, reikalauja kruopštaus projektavimo, kad būtų pasiektas priimtinas nusistovėjimo našumas.
Greitis ir perviršis santykis
Tūkstančių įrenginių bandymų duomenys rodo:
- 0,5 m/s: Minimalus perviršis (<2 mm), puikus nusistovėjimas
- 1,0 m/s: Vidutinis peršokimas (3–5 mm), geras nusėdimas su tinkama amortizacija
- 1,5 m/s: Žymus perviršis (6–10 mm), reikia optimizuoti
- 2,0+ m/s: Didelis perviršis (>10 mm), reikalauja pažangių sprendimų
Masės svarstymai
Lengvi kroviniai (<10 kg): Dominuoja oro spyruoklės poveikis, gali būti matomas svyravimas
Vidutinės apkrovos (10–50 kg): Subalansuotas našumas, standartinė amortizacija
Didelės apkrovos (>50 kg): Dominuoja inercija, dažnai reikalingi išoriniai amortizatoriai
Praktinės dizaino gairės
Nurodant pneumatinės slankiklės, skirtos didelio greičio taikymams:
- Apskaičiuokite kinetinę energiją: KE = ½mv² džauliais
- Patikrinkite amortizacijos gebą: Gamintojo specifikacijos džauliais
- Taikyti saugos koeficientą: 1,5–2,0× patikimumui užtikrinti
- Atsižvelkite į stabdymo atstumą: Ilgesnės pagalvėlės = švelnesnis stabdymas
- Patikrinkite slėgio reikalavimus: Didesnis slėgis padidina amortizacijos efektyvumą
„Bepto“ pateikiame išsamias technines specifikacijas visų mūsų bešarnyrinių cilindrų modelių, įskaitant amortizacijos pajėgumo kreives esant skirtingiems slėgiams ir greičiams. Šie duomenys leidžia inžinieriams priimti pagrįstus sprendimus, o ne spėlioti renkantis komponentus. 💪
Išvada
Sisteminga greitųjų pneumatinės slankiklių perviršio ir nusistovėjimo laiko analizė ir optimizavimas užtikrina matomą ciklo trukmės, padėties nustatymo tikslumo ir įrangos ilgaamžiškumo pagerėjimą – taip priimtinas veikimas tampa konkurenciniu pranašumu, pasitelkiant inžinerijos pagrindus ir patikrintas sprendimus. 🚀
Dažnai užduodami klausimai apie pneumatinio slydimo dinaminį veikimą
Klausimas: Kokia yra priimtina pramoninių pneumatinės pavaros slydimo vertė?
Daugeliui pramoninių taikymų priimtinas 2–5 mm perviršis, kuris rodo gerai suderintą amortizaciją. Preciziniai taikymams, pvz., elektronikos surinkimui ar medicinos prietaisų gamybai, gali būti reikalingas <1 mm perviršis, o mažiau kritiškiems medžiagų tvarkymo darbams gali būti toleruojamas 5–10 mm perviršis. Svarbiausia yra nuoseklumas – pakartotinį perviršį galima kompensuoti programavimo metu, tačiau atsitiktiniai svyravimai sukelia kokybės problemas.
K: Kaip sužinoti, ar tinkamai sureguliuota amortizacija?
Tinkamai sureguliuota amortizacija skleidžia švelnų “švilpimo” garsą, o ne stiprų metalinį trenksmą, minimaliai matomą atšokimą eigoje ir pastovią stabdymo padėtį ±2 mm ribose per kelis ciklus. Jei girdite stiprius smūgius, matote pernelyg didelį atšokimą arba pastebite padėties svyravimus >5 mm, reikia sureguliuoti amortizaciją arba įdiegti išorinius amortizatorius.
Klausimas: Ar galiu sutrumpinti nusėdimo laiką padidindamas oro slėgį?
Taip, bet su mažėjančiu pelnu ir galimais trūkumais. Padidinus slėgį nuo 6 bar iki 8 bar, paprastai pagerėja nusistovėjimo laikas 15–25%, nes padidėja amortizacijos efektyvumas ir sistemos standumas. Tačiau slėgis, didesnis nei 8 bar, retai suteikia papildomos naudos ir padidina oro suvartojimą, nusidėvėjimą ir triukšmo lygį. Prieš didinant slėgį, optimizuokite amortizacijos reguliavimą.
Klausimas: Kodėl mano pneumatinis slydimo mechanizmas veikia skirtingai, kai yra karštas ir kai yra šaltas?
Temperatūra daro įtaką oro tankiui, sandariklio trinties koeficientui ir tepalų klampumui – visi šie veiksniai turi įtakos dinaminiam veikimui. Šaltose sistemose (žemiau 15 °C) padidėja trintis ir sulėtėja reakcija, o karštose sistemose (virš 40 °C) sumažėja amortizacijos efektyvumas, nes sumažėja oro tankis. 20 °C temperatūros svyravimai gali pakeisti nusistovėjimo laiką 30–40%. Kritinėms taikmenoms apsvarstykite temperatūros kompensuojamą amortizaciją arba aplinkos kontrolę.
Klausimas: Ar turėčiau naudoti išorinius amortizatorius, ar pasikliauti įmontuotais amortizatoriais?
Įmontuota pneumatinė amortizacija turėtų būti jūsų pirmasis pasirinkimas – ji yra integruota, ekonomiška ir tinkama daugumai taikymų. Išorinius amortizatorius reikia įrengti, kai: kinetinė energija viršija amortizacijos pajėgumą (paprastai >50 džaulių), reikia reguliuoti skirtingas apkrovas, įmontuotos amortizacijos yra susidėvėjusios arba pažeistos, arba dirbate esant ekstremalioms greičiams (>2 m/s). Mūsų „Bepto“ technikos komanda gali apskaičiuoti jūsų konkrečius energijos poreikius ir rekomenduoti tinkamus sprendimus.
-
Suprasti be strypo pneumatinio cilindro veikimo principą ir taikymo sritis. ↩
-
Išsiaiškinkite, kaip slopinimo jėgos išsklaido energiją, kad sumažintų mechaninius svyravimus. ↩
-
Peržiūrėkite magnetinių ir optinių linijinių kodavimo įrenginių veikimo principus. ↩
-
Sužinokite, kaip impulsų pločio moduliacija (PWM) valdo pneumatinį srauto valdymą. ↩
-
Suprasti proporcinių vožtuvų funkciją tiksliame judesio valdyme. ↩
