

Введение
Вы затрудняетесь выбрать правильную стратегию управления для вашего интеллектуального пневматического цилиндра? 🤔 Многие инженеры сталкиваются с затруднениями при выборе между режимами управления усилием и положением, что приводит к неоптимальной производительности, повреждению продукции или неэффективности процессов. Неправильный выбор может означать разницу между бесперебойной работой и дорогостоящими сбоями.
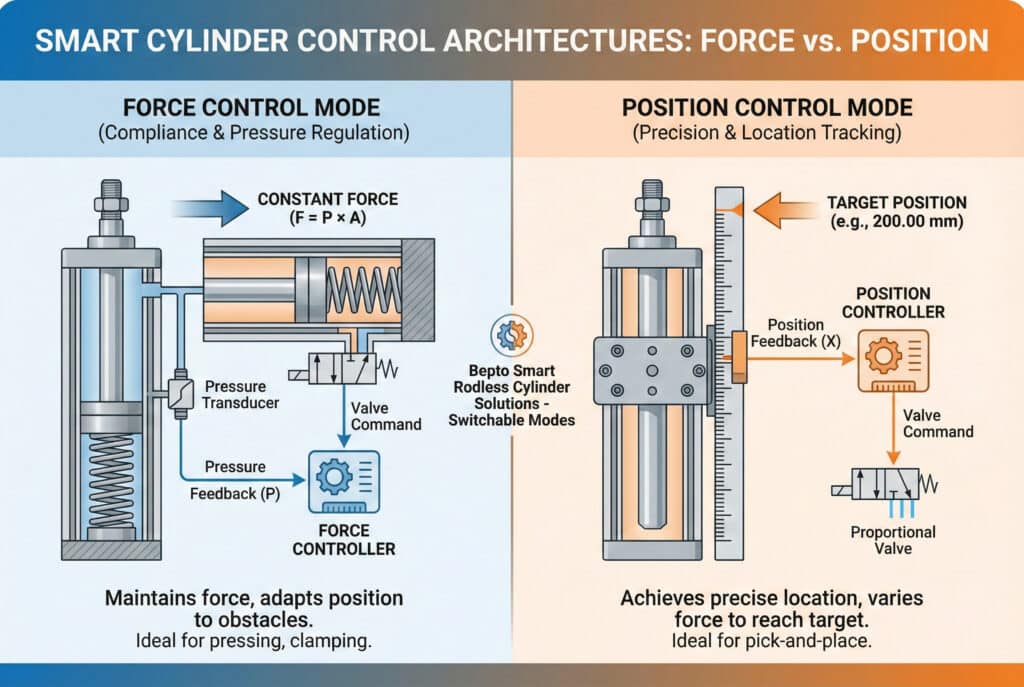
Режим управления усилием регулирует давление или усилие, развиваемое интеллектуальным цилиндром, для поддержания постоянного усилия толкания/тяги независимо от положения, что идеально подходит для операций прессования, зажимания и сборки. Режим управления положением направлен на достижение и поддержание точного положения каретки вдоль хода, что идеально подходит для задач захвата и размещения, сортировки и позиционирования. Выбор зависит от того, что является приоритетом в вашем применении: “насколько сильно” (усилие) или “где именно” (положение) действует цилиндр.
В прошлом месяце я консультировал Рэйчел, инженера-технолога на автомобильном заводе в Кливленде, штат Огайо. Ее команда использовала управление положением для установки дверных панелей, но панели трескались из-за неравномерного приложения силы. После того, как мы переключили ее интеллектуальный цилиндр Bepto без штока в режим управления усилием с обратной связью по давлению, количество брака снизилось с 8% до менее чем 0,5%. Понимание того, когда использовать каждый режим, имеет решающее значение для успеха применения. 💡
Оглавление
- В чем заключается принципиальная разница между управлением усилием и управлением положением?
- Когда следует использовать режим управления усилием в пневматических системах?
- Когда режим управления положением является лучшим выбором?
- Можно ли комбинировать оба режима управления в гибридных приложениях?
В чем заключается принципиальная разница между управлением усилием и управлением положением?
Понимание основного различия между этими философиями управления имеет важное значение для правильного применения инженерных решений. ⚙️
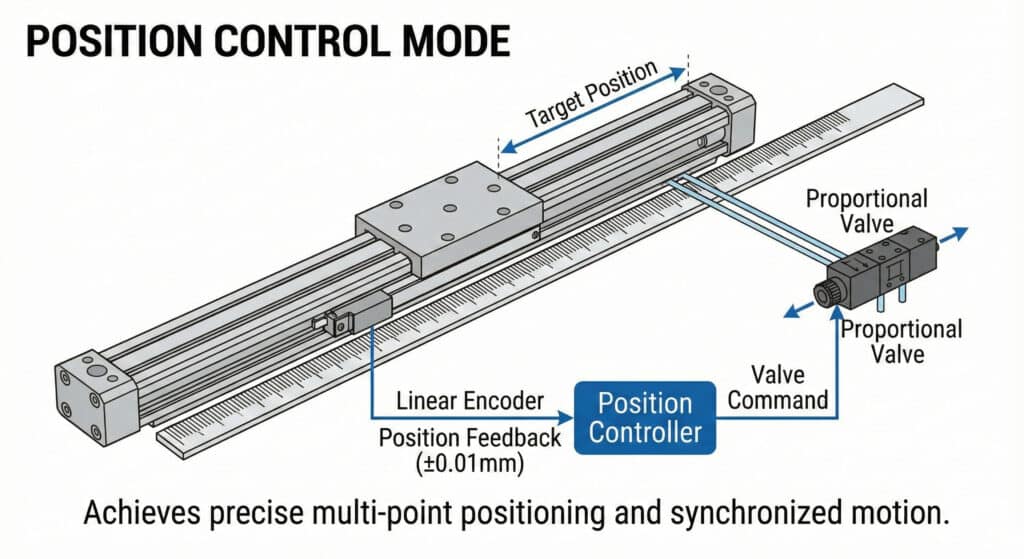
Режим управления усилием использует датчики давления или контроль тока для регулирования выходного усилия цилиндра, поддерживая постоянное усилие толкания/тяги даже при изменении положения или появлении препятствий. Режим управления положением использует линейные энкодеры1 или магнитные датчики для отслеживания и контроля положения каретки с точностью обычно от 0,01 до 0,5 мм, при этом приоритет отдается точности позиционирования, а не стабильности усилия. Каждый режим оптимизирует различные параметры производительности в зависимости от требований приложения.
Основы контура управления
Архитектура управления силой
В режиме контроля силы система постоянно контролирует:
- Датчики давления: Измерение давления в камере в режиме реального времени
- Расчет силы: F = P × A (давление × площадь поршня)
- Контур обратной связи: Регулирует положение клапана для поддержания заданного усилия
- Соответствие требованиям: Положение цилиндра варьируется в зависимости от характеристик заготовки.
Контроллеру неважно, где находится цилиндр — важно только то, что он прикладывает правильное усилие.
Архитектура управления положением
Системы контроля положения ориентированы на местоположение:
- Линейный энкодер: Отслеживает абсолютное или инкрементное положение
- Ошибка положения: Рассчитывает разницу от целевого значения
- Профилирование скорости: Контролирует ускорение и замедление
- Изменение силы: Изменения выходной силы в зависимости от нагрузки и трения
Сравнение ключевых показателей эффективности
| Характеристика | Управление силами | Управление положением |
|---|---|---|
| Первичная обратная связь | Давление/Сила | Позиция/Местоположение |
| Типичная точность | ±2-5% целевой силы | ±0,01–0,5 мм |
| Реакция на препятствия | Сохраняет силу, прекращает движение | Увеличивает усилие для достижения положения |
| Лучшее для обеспечения соответствия требованиям | Превосходно | Бедный |
| Повторяемость | Сила: Отличная / Положение: Переменное | Положение: Отличное / Сила: Переменная |
| Стоимость системы | Умеренный | Умеренно-высокий |
В Bepto мы предлагаем интеллектуальные решения для цилиндров без штока с обоими режимами управления, что позволяет инженерам выбирать оптимальную стратегию для конкретного применения. Наши системы могут даже переключаться между режимами на разных этапах одного и того же цикла. 🔄
Требования к датчикам
Потребности в управлении силой:
- Датчики давления (типичный диапазон 0–10 бар)
- Пропорциональные или сервоклапаны2 для точного регулирования давления
- Быстрые контуры управления (время цикла 1–5 мс)
Требования к управлению положением:
- Линейные датчики положения (магнитные, оптические или магнитострикционные)
- Обратная связь с высоким разрешением (0,01–0,1 мм)
- Прогнозируемые профили движения для плавного ускорения
Когда следует использовать режим управления усилием в пневматических системах?
Некоторые приложения абсолютно требуют контроля силы для обеспечения качества и безопасности. 🛡️
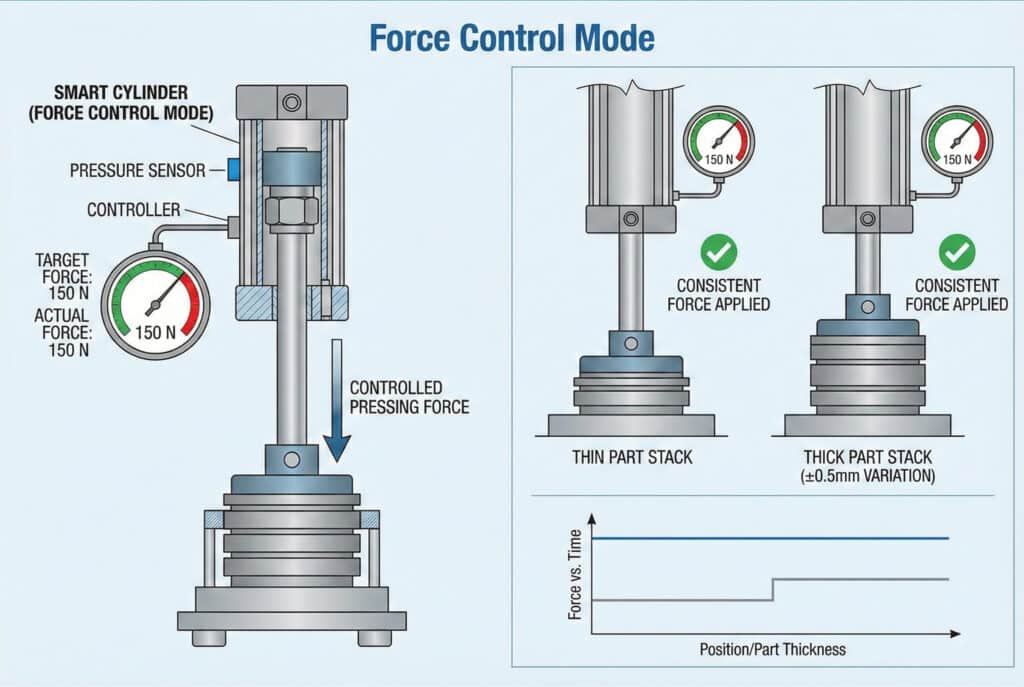
Режим управления усилием отлично подходит для применений, требующих: постоянного усилия прессования независимо от колебаний толщины детали (допуск ±0,5 мм), операций сборки, при которых чрезмерное усилие может привести к повреждению, тестирования для обеспечения качества, в ходе которого измеряется кривые «усилие-перемещение»3, бережное обращение с хрупкими продуктами и адаптивные процессы, в которых свойства заготовок варьируются. Любое применение, в котором “насколько сильно” имеет большее значение, чем “где именно”, выигрывает от контроля силы.
Идеальные области применения системы управления усилием
Сборка и прессование
Сборка с прессовой посадкой: Для установки подшипников, втулок или соединителей требуется контролируемое усилие, чтобы избежать повреждений. Контроль усилия обеспечивает равномерную установку без чрезмерного давления.
Сборка с защелкиванием: Пластиковые компоненты требуют точного усилия для закрепления защелок без повреждения. Контроль усилия обеспечивает “чувство”, которое предотвращает дефекты.
Давление подачи клея: Поддержание постоянной силы на поршнях дозатора обеспечивает равномерный поток материала независимо от изменений вязкости.
История успеха в реальном мире
Томас, менеджер по производству на заводе бытовой электроники в Сан-Хосе, Калифорния, столкнулся с частотой отказов 12% в процессе сборки компонентов смартфонов. Его цилиндры с позиционным управлением приводили компоненты на фиксированную глубину, но из-за различий в толщине компонентов некоторые детали получали недостаточную силу, а другие трескались от чрезмерной силы. После перехода на безштокные цилиндры Bepto с регулируемым усилием, настроенные на 150 Н, его процесс автоматически адаптировался к различиям в деталях — количество дефектов снизилось до 0,81 TP3T, а время цикла фактически сократилось на 0,2 секунды. 📱
Преимущества управления усилием
- Адаптируемость к изменениям: Автоматически компенсирует деталь накопление допусков4
- Предотвращает повреждения: Прекращает увеличение силы при достижении цели
- Обратная связь по качеству: Данные Force обеспечивают возможность мониторинга процессов.
- Бережное обращение: Идеально подходит для хрупких материалов (стекло, керамика, электроника)
Категории приложений
| Промышленность | Типовое применение | Диапазон целевой силы | Ключевое преимущество |
|---|---|---|---|
| Автомобили | Установка уплотнительной ленты | 50–200 Н | Надежное уплотнение без повреждений |
| Электроника | Вставка компонентов на печатную плату | 10-80 Н | Предотвращает растрескивание досок |
| Упаковка | Запечатывание картонных коробок | 100–400 Н | Адаптируется к изменению уровня наполнения |
| Медицинское оборудование | Катетерный узел | 5-30 Н | Обеспечивает целостность без деформации |
| Пищевая промышленность | Прессование/формование продукта | 50–500 Н | Равномерный контроль плотности |
Когда режим управления положением является лучшим выбором?
Управление положением преобладает в приложениях, где точность определения местоположения имеет первостепенное значение. 🎯
Режим управления положением необходим в следующих случаях: когда требуется абсолютная точность позиционирования в пределах ±0,1 мм, когда необходимо несколько положений остановки вдоль хода, когда критически важно синхронизированное движение с другими осями, когда высокоскоростные перемещения от точки к точке требуют оптимизированных профилей скорости или когда приложение включает в себя захват, размещение, сортировку или точную передачу материала. Производственные процессы, требующие повторяемости положений независимо от колебаний нагрузки, получают наибольшую выгоду от управления положением.
Области превосходства в управлении положением
Операции по подбору и размещению
Роботизированная сборка и перемещение материалов требуют, чтобы цилиндры повторно перемещались в точные места:
- Многопозиционные упоры: Один цилиндр обслуживает несколько станций на протяжении всего своего хода.
- Синхронизированное движение: Координирует работу конвейеров, роботов или других осей
- Высокая скорость и точность: Сохраняет точность даже при скорости более 2 м/с.
Приложения для точного позиционирования
Загрузка станков с ЧПУ: Для обеспечения точности обработки заготовки должны быть выровнены с точностью до 0,05 мм.
Оптическая сборка: Позиционирование объектива требует повторяемости менее 0,1 мм для обеспечения качества фокусировки.
Системы контроля: Для анализа изображений необходимо стабильное положение камеры.
Оптимизация профиля движения
Управление положением позволяет реализовывать сложные стратегии движения:
- Ускорение S-кривой5: Плавный запуск/остановка снижает механические удары
- Смешивание скоростей: Переходы между движениями без остановки
- Электронное зацепление: Синхронизируется с главной осью математически
- Летучий нож: Соответствует скорости движения ленты во время резки
Преимущества управления положением
- Абсолютная точность: Достигает цели с точностью до микронов
- Многоточечная способность: Неограниченное количество остановок по длине хода
- Предсказуемые сроки: Согласованность времени цикла для планирования пропускной способности
- Синхронизация: Координирует сложные многоосевые движения
Типовые спецификации
Современные интеллектуальные цилиндры без штока с контролем положения обеспечивают:
- Точность позиционирования: от ±0,05 мм до ±0,5 мм в зависимости от датчика
- Повторяемость: ±0,01 мм для магнитострикционных систем
- Максимальная скорость: 2-3 м/с с контролируемым замедлением
- Разрешение: 0,01 мм или лучше с высококачественными энкодерами
Наши бесповодные цилиндры Bepto с позиционным управлением обеспечивают производительность, сопоставимую с оригинальными деталями, при значительно более низкой стоимости и полной совместимости для прямой замены деталей основных брендов. Мы помогли десяткам предприятий модернизировать устаревшие системы, сократив затраты на запасные части на 35%. 💰
Можно ли комбинировать оба режима управления в гибридных приложениях?
В сложных приложениях часто требуется переключение между режимами управления на разных фазах цикла. 🔀
Гибридное управление силой и положением позволяет интеллектуальным цилиндрам использовать управление положением для быстрых подъездных движений, затем переключаться на управление силой для фактической рабочей операции и возвращаться к управлению положением для возврата. Такое сочетание обеспечивает оптимальное время цикла (быстрое позиционирование) с гарантией качества (контролируемое приложение силы). Для реализации требуются цилиндры с датчиками давления и положения, а также контроллеры, способные переключаться между режимами в течение 10–50 мс.

Гибридные стратегии управления
Последовательное переключение режимов
Этап 1 – Быстрый подход (управление положением):
- Быстро переместиться в положение, близкое к контакту
- Высокая скорость (1,5–2 м/с) для оптимизации времени цикла
- Остановитесь за 2–5 мм до соприкосновения с заготовкой.
Этап 2 – Рабочая операция (управление силой):
- Переключиться в режим принудительного управления
- Применяйте контролируемое усилие прессования/сборки
- Контролируйте кривую «усилие-перемещение» для обеспечения качества
Фаза 3 – Втягивание (управление положением):
- Возврат в исходное или промежуточное положение
- Оптимизированный профиль скорости для следующего цикла
Реальное гибридное приложение
Производитель медицинского оборудования в Миннеаполисе, штат Миннесота, использует именно эту стратегию для сборки наконечников катетеров. Интеллектуальный цилиндр Bepto быстро перемещается (режим позиционирования) к станции сборки за 0,4 секунды, переключается в режим силы, чтобы приложить точно 18 Н для термической фиксации наконечника (0,6 секунды), а затем отходит под управлением позиционирования (0,3 секунды). Общее время цикла: 1,3 секунды с нулевым количеством дефектов за 2 миллиона циклов. 🏥
Требования к внедрению
| Компонент | Технические характеристики | Назначение |
|---|---|---|
| Двойные датчики | Давление + положение | Включить оба режима управления |
| Быстрый контроллер | Переключение режимов менее чем за 10 мс | Плавный переход |
| Сервопривод/пропорциональный клапан | Высокочастотный отклик | Поддерживает оба типа управления |
| Расширенное программное обеспечение | Логика конечного автомата | Управляет переходами между режимами |
Преимущества гибридного подхода
- Оптимизированное время цикла: Быстрые движения, где точность не имеет решающего значения
- Обеспечение качества: Контролируемая сила там, где это важно
- Мониторинг процессов: Зарегистрированы данные о положении и усилии
- Гибкость: Автоматическая адаптация к вариациям продукта
Система принятия решений
Используйте управление силой, когда:
- Толщина/высота детали варьируется >0,5 мм
- Свойства материалов несовместимы
- Возможны повреждения от чрезмерного усилия
- Качество процесса зависит от приложения силы
Используйте контроль положения, когда:
- Абсолютная точность определения местоположения имеет решающее значение
- Требуется несколько положений остановки
- Требуется синхронизация с другим оборудованием
- Оптимизация времени цикла требует высокой скорости
Используйте гибридное управление, когда:
- Приложение имеет четкие этапы позиционирования и работы
- Важны как скорость, так и качество
- Мониторинг процесса требует данных как о силе, так и о положении
- Бюджет позволяет использовать передовые интеллектуальные цилиндровые системы
Заключение
Выбор между режимами управления усилием и управлением положением — или внедрение гибридных стратегий — напрямую влияет на качество продукции, эффективность цикла и технологические возможности, что делает это фундаментальное решение одним из самых важных в проектировании пневматических систем для современного производства. 🚀
Часто задаваемые вопросы о режимах управления интеллектуальным цилиндром
В: Могу ли я модернизировать имеющиеся у меня цилиндры, чтобы добавить управление усилием или положением?
Модернизация зависит от текущей конструкции вашего цилиндра. Стандартные цилиндры можно модернизировать с помощью внешних датчиков положения (магнитные полоски, датчики с тросом) для управления положением, но для управления усилием требуются датчики давления в портах цилиндра и пропорциональное управление клапаном. Полная модернизация обычно обходится в 60-80% от стоимости нового интеллектуального цилиндра, поэтому замена часто является более экономически целесообразной. Bepto предлагает экономичные интеллектуальные цилиндры без штока, совместимые с основными монтажными интерфейсами OEM.
В: Насколько точность управления усилием зависит от стабильности давления воздуха?
Точность управления усилием прямо пропорциональна стабильности давления питания, поскольку F = P × A. Колебание давления ±0,2 бар при давлении питания 6 бар вызывает изменение усилия ±3,3%. Для критически важных применений, требующих точности усилия ±1%, используйте регуляторы давления со стабильностью ±0,05 бар и рассмотрите возможность использования замкнутого контура управления давлением. Управление положением менее чувствительно к колебаниям давления, поскольку оно регулирует положение клапана для достижения заданного положения независимо от давления.
В: Какое время отклика можно ожидать при переключении между режимами управления?
Современные интеллектуальные контроллеры цилиндров переключают режимы за 10–50 мс в зависимости от архитектуры системы. Фактическая физическая реакция (изменение движения цилиндра) занимает дополнительно 20–100 мс в зависимости от времени отклика клапана и динамики пневматической системы. Для приложений, требующих частого переключения режимов (>5 раз в секунду), убедитесь, что ваш контроллер и клапаны рассчитаны на высокочастотную работу, чтобы избежать снижения производительности.
В: Потребляют ли цилиндры с регулируемым усилием больше воздуха, чем цилиндры с регулируемым положением?
Управление усилием обычно потребляет на 10–20% больше воздуха, поскольку оно непрерывно регулирует давление для поддержания заданного усилия, в то время как управление положением использует полное давление для перемещений, а затем удерживает положение с минимальным расходом. Однако управление усилием предотвращает потерю энергии из-за избыточного давления, что может компенсировать эту разницу. Фактическое потребление в значительной степени зависит от рабочего цикла применения — проконсультируйтесь с нашей инженерной командой Bepto для получения конкретных расчетов на основе параметров вашего процесса.
В: Может ли один интеллектуальный цилиндр управлять как растягивающей (тянущей), так и сжимающей (толкающей) силой?
Да, усовершенствованные интеллектуальные цилиндры с датчиками давления в обеих камерах могут контролировать усилие в обоих направлениях. Для этого требуются двойные датчики давления и расчет двунаправленного усилия (F = P₁×A₁ – P₂×A₂ с учетом различий в площади штока). Такие области применения, как испытание материалов, регулирование натяжения полотна и двунаправленная сборка, извлекают выгоду из этой возможности. Стандартные реализации обычно контролируют усилие только в одном направлении (обычно толкая), чтобы снизить стоимость и сложность.
-
Руководство, объясняющее, как линейные энкодеры преобразуют механическое движение в электрические сигналы для точного позиционирования. ↩
-
Обзор того, как пропорциональные и сервоклапаны регулируют расход и давление в гидросистемах. ↩
-
Технический ресурс по интерпретации кривых «сила-перемещение» для анализа свойств материалов и механического поведения. ↩
-
Инженерное руководство по анализу суммирования допусков и его влиянию на посадку и функционирование узлов. ↩
-
Сравнение профилей движения, объясняющих, как ускорение S-кривой снижает механические вибрации и рывки. ↩
