

Uvod
Se trudite izbrati pravo strategijo krmiljenja za svojo pametno pnevmatsko cilindrično aplikacijo? 🤔 Mnogi inženirji se soočajo z dilemo pri izbiri med načinom krmiljenja sile in načinom krmiljenja položaja, kar vodi do suboptimalne zmogljivosti, poškodb izdelkov ali neučinkovitih procesov. Napačna izbira lahko pomeni razliko med nemotenim delovanjem in dragimi okvarami.
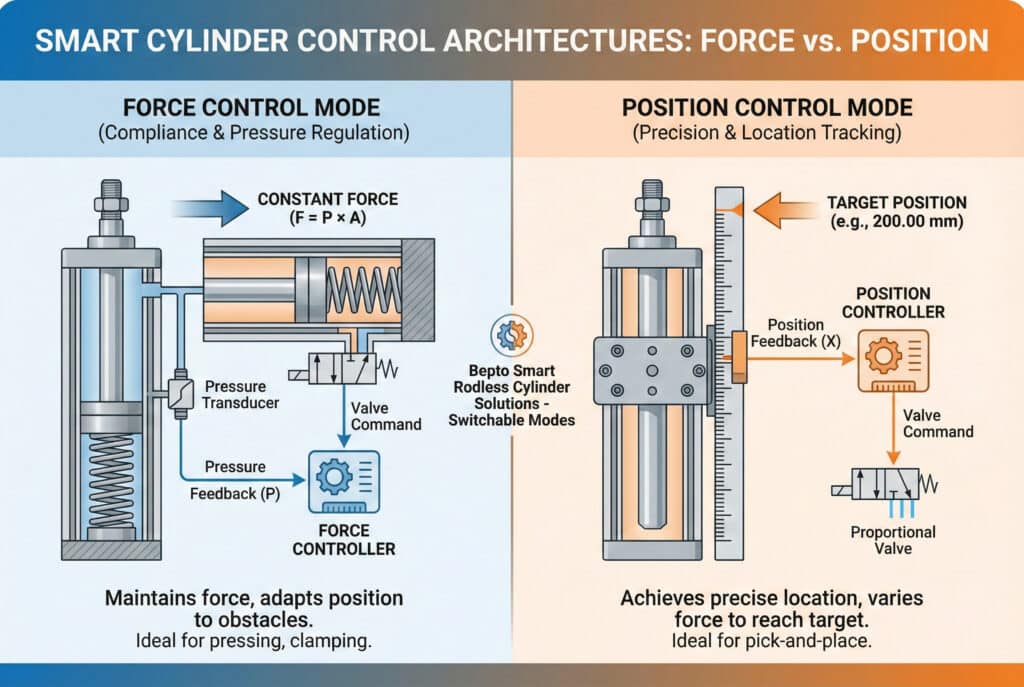
Način krmiljenja sile uravnava tlak ali izhodno silo pametnega cilindra, da se ohrani enakomerna potisna/vlečna sila ne glede na položaj, kar je idealno za stiskanje, vpenjanje in sestavljanje. Način krmiljenja položaja se osredotoča na doseganje in ohranjanje natančnega položaja vozička vzdolž hod, kar je idealno za nalaganje, razvrščanje in pozicioniranje. Izbira je odvisna od tega, ali vaša aplikacija daje prednost “kako močno” (sila) ali “kje natančno” (položaj) deluje cilinder.
Prejšnji mesec sem se posvetoval z Rachel, procesno inženirko v avtomobilski tovarni v Clevelandu, Ohio. Njen tim je uporabljal nadzor položaja za namestitev vratnih plošč, vendar so se plošče zaradi neenakomernega izvajanja sile pokale. Ko smo njen pametni valj brez batov Bepto preklopili v način nadzora sile s povratno informacijo o tlaku, se je stopnja napak zmanjšala z 8% na manj kot 0,5%. Razumevanje, kdaj uporabiti posamezni način, je ključnega pomena za uspeh aplikacije. 💡
Kazalo vsebine
- Kakšna je temeljna razlika med nadzorom sile in nadzorom položaja?
- Kdaj naj uporabite način nadzora sile v pnevmatskih aplikacijah?
- Kdaj je način krmiljenja položaja boljša izbira?
- Ali lahko v hibridnih aplikacijah združite oba načina upravljanja?
Kakšna je temeljna razlika med nadzorom sile in nadzorom položaja?
Razumevanje bistvene razlike med temi filozofijami nadzora je bistveno za pravilno uporabo inženiringa. ⚙️
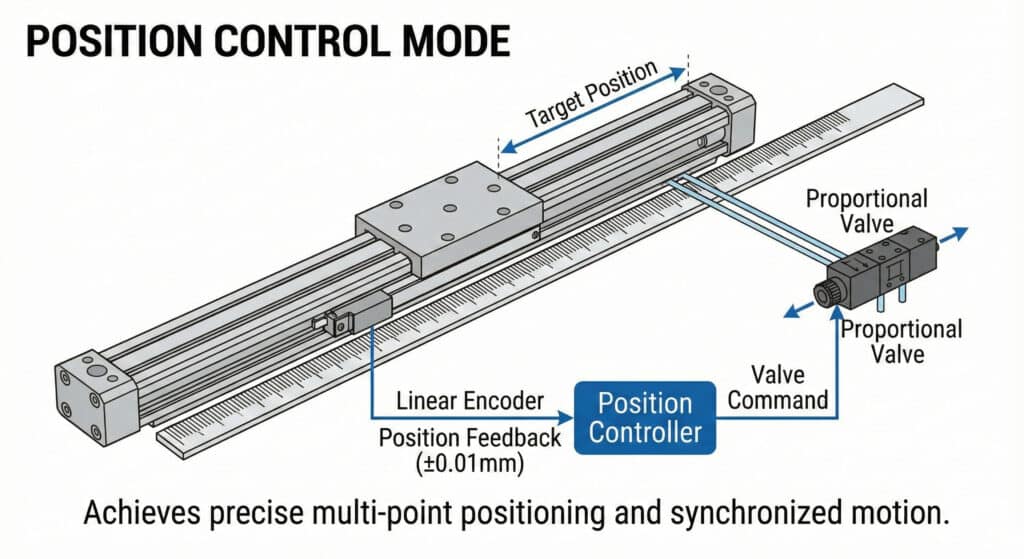
Način krmiljenja sile uporablja senzorje tlaka ali spremljanje toka za uravnavanje izhodne sile valja, pri čemer ohranja konstantno silo potiskanja/vlečenja tudi ob spremembah položaja ali naletih na ovire. Način krmiljenja položaja uporablja linearni kodirniki1 ali magnetne senzorje za natančno sledenje in nadzorovanje položaja vozička, običajno z natančnostjo med 0,01 in 0,5 mm, pri čemer je natančno pozicioniranje pomembnejše od enakomernosti sile. Vsak način optimizira različne parametre delovanja glede na zahteve aplikacije.
Osnove krmilne zanke
Arhitektura za nadzor sile
V načinu nadzora moči sistem neprekinjeno spremlja:
- Senzorji tlaka: Merjenje tlaka v komori v realnem času
- Izračun sile: F = P × A (tlak × površina bata)
- Povratna zanka: Prilagaja položaj ventila, da se ohrani ciljna sila.
- Skladnost: Položaj valja se spreminja glede na lastnosti obdelovanca.
Krmilnik ne skrbi, kje je valj, pomembno je le, da uporablja pravo silo.
Arhitektura za nadzor položaja
Sistemi za nadzor položaja se osredotočajo na lokacijo:
- Linearni kodirnik: Sledi absolutni ali inkrementalni položaj
- Napaka položaja: Izračuna razliko od cilja
- profiliranje hitrosti: Nadzoruje pospeševanje in zaviranje
- Spreminjanje sile: Izhodna sila se spreminja glede na obremenitev in trenje.
Primerjava ključnih kazalnikov uspešnosti
| Značilnosti | Nadzor sile | Nadzor položaja |
|---|---|---|
| Primarni povratni odziv | Tlak/sila | Položaj/Lokacija |
| Tipična natančnost | ±2-5% ciljne sile | ±0,01–0,5 mm |
| Odziv na ovire | Ohranja silo, preneha se premikati | Poveča silo za doseganje položaja |
| Najboljše za skladnost | Odlično | Slaba |
| Ponovljivost | Sila: odlična / Položaj: spremenljiv | Položaj: odličen / Sila: spremenljiva |
| Stroški sistema | Zmerno | Zmerno visoka |
V podjetju Bepto ponujamo pametne rešitve brez batnih valjev z obema načinoma krmiljenja, kar inženirjem omogoča, da izberejo optimalno strategijo za svojo specifično aplikacijo. Naši sistemi lahko med različnimi fazami istega cikla celo preklapljajo med načini. 🔄
Zahteve za senzorje
Potrebe po nadzoru sile:
- Tlačni pretvorniki (tipično območje 0–10 barov)
- Proporcionalni ali servo ventili2 za natančno regulacijo tlaka
- Hitri krmilni krogi (čas cikla 1–5 ms)
Potrebe po nadzoru položaja:
- Linearni senzorji položaja (magnetni, optični ali magnetostriktivni)
- Povratne informacije z visoko ločljivostjo (0,01–0,1 mm)
- Prediktivni profili gibanja za gladko pospeševanje
Kdaj naj uporabite način nadzora sile v pnevmatskih aplikacijah?
Nekatere aplikacije za zagotavljanje kakovosti in varnosti nujno zahtevajo nadzor sile. 🛡️
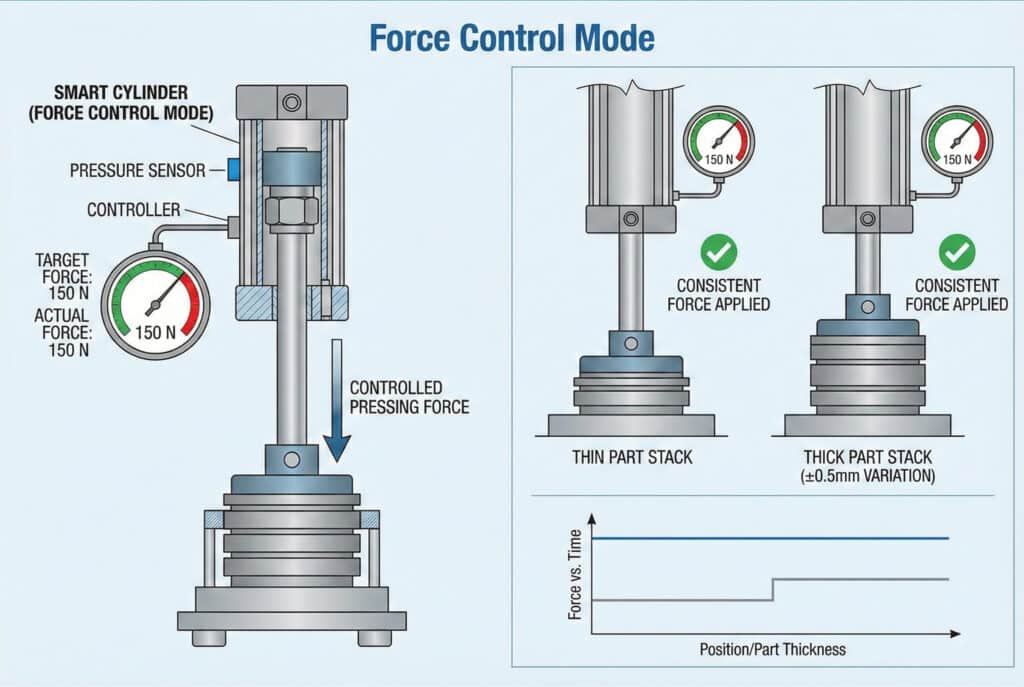
Način nadzora sile je odličen za aplikacije, ki zahtevajo: enakomerno pritiskalno silo ne glede na odstopanje debeline dela (toleranca ±0,5 mm), skladne montažne operacije, pri katerih prekomerna sila povzroča poškodbe, testiranje za zagotavljanje kakovosti, ki meri krivulje sile in premika3, nežno ravnanje z občutljivimi izdelki in prilagodljivi procesi, pri katerih se lastnosti obdelovanca spreminjajo. Vsaka aplikacija, pri kateri je pomembnejše “kako močno” kot “kje natančno”, ima koristi od nadzora sile.
Idealne aplikacije za nadzor sile
Sestavljanje in stiskanje
Vtiskovanje: Vstavljanje ležajev, puš ali konektorjev zahteva nadzorovano silo, da se prepreči poškodovanje. Nadzor sile zagotavlja enakomerno vstavljanje brez prekomernega pritiska.
Sklop z zaskočnim pritrdilom: Plastični deli potrebujejo natančno silo, da se lahko zaskočijo, ne da bi se zlomili. Nadzor sile zagotavlja “občutek”, ki preprečuje napake.
Tlak za doziranje lepila: Ohranjanje enakomerne sile na dozirnih batkih zagotavlja enakomeren pretok materiala ne glede na spremembe viskoznosti.
Zgodba o uspehu v resničnem svetu
Thomas, vodja proizvodnje v tovarni potrošniške elektronike v San Joseju v Kaliforniji, je imel 12% stopnjo napak pri sestavljanju komponent za pametne telefone. Njegovi cilindri z nadzorom položaja so komponente potiskali do določene globine, vendar so zaradi razlik v debelini komponent nekatere dele premalo obremenili, druge pa so se zaradi prekomerne sile poškodovale. Po prehodu na silo-nadzorovane valjčke brez batov Bepto, nastavljene na 150 N, se je njegov proces samodejno prilagodil razlikam v delih – število napak se je zmanjšalo na 0,81 TP3T, čas cikla pa se je dejansko izboljšal za 0,2 sekunde. 📱
Prednosti nadzora sile
- Prilagodljiv na spremembe: Samodejno kompenzira del skladanje toleranc4
- Preprečuje poškodbe: Preneha povečevati silo, ko je cilj dosežen.
- Povratne informacije o kakovosti: Podatki o sili omogočajo spremljanje procesov.
- Nežno ravnanje: Idealno za krhke materiale (steklo, keramika, elektronika)
Kategorije aplikacij
| Industrija | Tipična uporaba | Ciljni razpon sile | Ključna prednost |
|---|---|---|---|
| Avtomobilska industrija | Namestitev tesnil | 50–200 N | Enotna tesnitev brez poškodb |
| Elektronika | Vstavljanje komponent na tiskano vezje | 10–80 N | Preprečuje razpokanje plošče |
| Pakiranje | Zapiranje kartona | 100–400 N | Prilagaja se spremembam nivoja polnjenja |
| Medicinski pripomoček | Sklop katetra | 5-30N | Zagotavlja celovitost brez deformacij |
| Predelava hrane | Stiskanje/oblikovanje izdelkov | 50–500 N | Enotni nadzor gostote |
Kdaj je način krmiljenja položaja boljša izbira?
Krmiljenje položaja prevladuje v aplikacijah, kjer je natančnost lokacije najpomembnejša. 🎯
Način krmiljenja položaja je bistven, kadar: je potrebna absolutna natančnost pozicioniranja znotraj ±0,1 mm, je potrebnih več položajev za ustavitev vzdolž hod, je sinhronizirano gibanje z drugimi osmi ključnega pomena, hitra gibanja od točke do točke zahtevajo optimizirane profile hitrosti ali pa aplikacija vključuje pobiranje, nameščanje, razvrščanje ali natančen prenos materiala. Proizvodni procesi, ki zahtevajo ponovljive lokacije ne glede na spremembe obremenitve, imajo največ koristi od krmiljenja položaja.
Področja odličnosti pri nadzoru položaja
Operacije pobiranja in nameščanja
Robotska montaža in ravnanje z materiali zahtevata, da se cilindri večkrat premikajo na natančne lokacije:
- Večpozicijske zapore: En valj med svojim delovanjem oskrbuje več postaj.
- Sinhronizirano gibanje: Usklajuje se s transportnimi trakovi, roboti ali drugimi osmi.
- Visoka hitrost in natančnost: Ohranja natančnost tudi pri hitrostih nad 2 m/s.
Aplikacije za natančno pozicioniranje
Nakladanje CNC strojev: Obdelovani deli morajo biti poravnani z natančnostjo 0,05 mm, da se zagotovi natančnost obdelave.
Optična sestava: Pozicioniranje objektiva zahteva ponovljivost pod 0,1 mm za kakovost ostrenja.
Inšpekcijski sistemi: Za analizo slike je potrebna dosledna pozicija kamere.
Optimizacija profila gibanja
Krmiljenje položaja omogoča sofisticirane strategije gibanja:
- pospešek S-krivine5: Gladek zagon/zaustavitev zmanjšuje mehanske pretrese.
- Mešanje hitrosti: Prehodi med gibi brez ustavljanja
- Elektronski menjalnik: Sinhronizira se z glavno osjo matematično
- Leteče škarje: Usklajuje hitrost premikanja traku med rezanjem
Prednosti nadzora položaja
- Absolutna natančnost: Dosega cilj v mikronih
- Večtočkovna zmogljivost: Neomejeno število ustavitev vzdolž dolžine giba
- Predvidljiv časovni razpored: Doslednost časa cikla za načrtovanje pretoka
- Sinhronizacija: Koordinate kompleksnega večosnega gibanja
Tipične specifikacije
Sodobni pametni cilindri brez palice z nadzorom položaja zagotavljajo:
- Natančnost določanja položaja: ±0,05 mm do ±0,5 mm, odvisno od senzorja
- Ponovljivost: ±0,01 mm za magnetostriktivne sisteme
- Največja hitrost: 2–3 m/s z nadzorovanim zaviranjem
- Resolucija: 0,01 mm ali boljša z visokokakovostnimi kodirniki
Naši cilindri brez batov z nadzorom položaja Bepto zagotavljajo enako zmogljivost kot originalni proizvodi, vendar po znatno nižji ceni, in so popolnoma združljivi z nadomestnimi deli večjih blagovnih znamk. Pomagali smo številnim obratom nadgraditi zastarele sisteme in hkrati zmanjšati stroške zalog nadomestnih delov za 35%. 💰
Ali lahko v hibridnih aplikacijah združite oba načina upravljanja?
Napredne aplikacije pogosto zahtevajo preklapljanje med načini krmiljenja med različnimi fazami cikla. 🔀
Hibridno krmiljenje sile in položaja omogoča pametnim cilindrom, da uporabijo krmiljenje položaja za hitre približevalne gibe, nato preklopijo na krmiljenje sile za dejansko delovanje in se vrnejo na krmiljenje položaja za umik. Ta kombinacija zagotavlja optimalni čas cikla (hitro pozicioniranje) z zagotavljanjem kakovosti (nadzorovano uporabo sile). Izvedba zahteva cilindre s senzorji tlaka in položaja ter krmilnike, ki omogočajo preklop načina v 10–50 ms.

Hibridne strategije nadzora
Preklapljanje med zaporednimi načini
Faza 1 – Hitri pristop (nadzor položaja):
- Hitro se premaknite v položaj, ki je blizu stiku.
- Visoka hitrost (1,5–2 m/s) za optimizacijo časa cikla
- Ustavite se 2–5 mm pred stikom z obdelovancem.
Faza 2 – Delovanje (nadzor sile):
- Preklopite v način prisilnega nadzora
- Uporabite nadzorovano silo stiskanja/sestavljanja
- Spremljajte krivuljo sile in premika za zagotavljanje kakovosti
Faza 3 – Umik (nadzor položaja):
- Vrnitev v izhodiščni ali vmesni položaj
- Optimiziran profil hitrosti za naslednji cikel
Hibridna aplikacija v realnem svetu
Proizvajalec medicinskih pripomočkov v Minneapolisu v Minnesoti uporablja točno to strategijo za sestavljanje konic katetrov. Pametni valj Bepto se v 0,4 sekunde hitro pozicionira (način pozicioniranja) na montažni postaji, preklopi v način sile, da natančno uporabi 18 N za toplotno pritrditev konice (0,6 sekunde), nato pa se umakne pod nadzorom pozicioniranja (0,3 sekunde). Skupni čas cikla: 1,3 sekunde brez napak v več kot 2 milijonih ciklov. 🏥
Zahteve za izvajanje
| Komponenta | Specifikacija | Namen |
|---|---|---|
| Dvojni senzorji | Tlak + položaj | Omogoči oba načina upravljanja |
| Hiter krmilnik | Preklop med načini v manj kot 10 ms | Nemoten prehod |
| Servo/proporcionalni ventil | Visokofrekvenčni odziv | Podpira oba tipa upravljanja |
| Napredna programska oprema | Logika državnega stroja | Upravlja prehode med načini |
Prednosti hibridnega pristopa
- Optimiziran čas cikla: Hitri gibi, pri katerih natančnost ni ključnega pomena
- Zagotavljanje kakovosti: Nadzorovana sila tam, kjer je to pomembno
- Spremljanje procesov: Zapisani podatki o položaju in sili
- Prilagodljivost: Samodejno prilagajanje različicam izdelkov
Okvir za odločanje
Uporabite nadzor sile, kadar:
- Debelina/višina dela se spreminja >0,5 mm
- Lastnosti materiala so neenakomerne.
- Možna je poškodba zaradi prekomerne sile.
- Kakovost procesa je odvisna od uporabljene sile
Uporabite nadzor položaja, kadar:
- Absolutna natančnost lokacije je ključnega pomena
- Potrebnih je več položajev za ustavitev
- Potrebna je sinhronizacija z drugo opremo.
- Optimizacija časa cikla zahteva visoko hitrost
Hibridno krmiljenje uporabite, kadar:
- Aplikacija ima različne faze pozicioniranja in delovanja.
- Hitrost in kakovost sta ključnega pomena.
- Spremljanje procesa zahteva podatke o sili in položaju
- Proračun omogoča napredne pametne sisteme jeklenk
Zaključek
Izbira med načinom krmiljenja sile in načinom krmiljenja položaja – ali izvajanje hibridnih strategij – neposredno vpliva na kakovost izdelka, učinkovitost cikla in zmogljivost procesa, zaradi česar je ta temeljna odločitev ena najpomembnejših pri načrtovanju pnevmatskih sistemov za sodobno proizvodnjo. 🚀
Pogosta vprašanja o načinih pametnega upravljanja jeklenk
V: Ali lahko svoje obstoječe jeklenke naknadno opremim z nadzorom sile ali položaja?
Nadgradnja je odvisna od trenutne zasnove vašega valja. Standardne valje je mogoče nadgraditi z zunanjimi senzorji položaja (magnetnimi trakovi, kodirniki z vlečnim žičnim kablom) za nadzor položaja, vendar nadzor sile zahteva pretvornike tlaka v vratih valja in proporcionalno krmiljenje ventila. Celotni stroški nadgradnje znašajo običajno 60–80 % cene novega pametnega valja, zato je zamenjava pogosto bolj ekonomična. Bepto ponuja stroškovno učinkovite nadomestne pametne valje brez batov, ki so združljivi z glavnimi vmesniki za montažo OEM.
V: Koliko je natančnost nadzora sile odvisna od stabilnosti zračnega tlaka?
Natančnost krmiljenja sile je neposredno sorazmerna s stabilnostjo dovodnega tlaka, saj F = P × A. Nihanje tlaka ±0,2 bara pri dovodnem tlaku 6 barov povzroči nihanje sile ±3,31 TP3T. Za kritične aplikacije, ki zahtevajo natančnost sile ±11 TP3T, uporabite regulatorje tlaka s stabilnostjo ±0,05 bara in razmislite o krmiljenju tlaka v zaprtem krogu. Krmiljenje položaja je manj občutljivo na nihanja tlaka, saj prilagaja položaj ventila, da doseže ciljni položaj ne glede na tlak.
V: Kakšen odzivni čas lahko pričakujem pri preklopu med načini upravljanja?
Sodobni pametni krmilniki valjev preklapljajo med načini v 10–50 ms, odvisno od arhitekture sistema. Dejanski fizični odziv (sprememba gibanja valja) traja dodatnih 20–100 ms, odvisno od odzivnega časa ventila in dinamike pnevmatskega sistema. Za aplikacije, ki zahtevajo pogosto preklapljanje med načini (>5-krat na sekundo), poskrbite, da so vaš krmilnik in ventili primerni za visokofrekvenčno delovanje, da se izognete poslabšanju zmogljivosti.
V: Ali cilindri z nadzorom sile porabijo več zraka kot cilindri z nadzorom položaja?
Nadzor sile običajno porabi 10–20% več zraka, ker neprekinjeno modulira tlak, da ohrani ciljno silo, medtem ko nadzor položaja uporablja polni tlak za premike, nato pa ohranja položaj z minimalnim pretokom. Vendar nadzor sile preprečuje izgubo energije zaradi prekomernega pritiska, kar lahko izravna to razliko. Dejanska poraba je močno odvisna od delovnega cikla aplikacije – za natančne izračune na podlagi parametrov vašega procesa se posvetujte z našim inženirskim timom Bepto.
V: Ali lahko en pametni valj upravlja tako z nadzorom natezne (vlečne) kot tudi tlačne (potisne) sile?
Da, napredni pametni cilindri s senzorji tlaka v obeh komorah lahko nadzorujejo silo v obeh smereh. Za to so potrebni dvojni pretvorniki tlaka in izračun dvosmerne sile (F = P₁×A₁ – P₂×A₂, upoštevajoč razlike v površini palice). Te zmogljivosti so koristne za aplikacije, kot so testiranje materialov, nadzor napetosti spleta in dvosmerno sestavljanje. Standardne izvedbe običajno nadzorujejo silo le v eni smeri (ponavadi potiskanje), da se zmanjšajo stroški in zapletenost.
-
Vodnik, ki pojasnjuje, kako linearni kodirniki pretvarjajo mehansko gibanje v električne signale za natančno pozicioniranje. ↩
-
Pregled načina, kako proporcionalni in servo ventili uravnavajo pretok in tlak v hidravličnih sistemih. ↩
-
Tehnični vir za razlago krivulj sile-premika za analizo lastnosti materialov in mehanskih lastnosti. ↩
-
Inženirski priročnik o analizi kopičenja toleranc in njenem vplivu na prileganje in delovanje sestava. ↩
-
Primerjava profilov gibanja, ki pojasnjuje, kako pospešek S-krivine zmanjšuje mehanske vibracije in sunke. ↩
