

Вступ
Ви не можете вибрати правильну стратегію управління для вашого інтелектуального пневматичного циліндра? 🤔 Багато інженерів стикаються з проблемою вибору між режимами управління силою та положенням, що призводить до неоптимальної продуктивності, пошкодження продукції або неефективних процесів. Неправильний вибір може означати різницю між безперебійною роботою та дороговартісними несправностями.
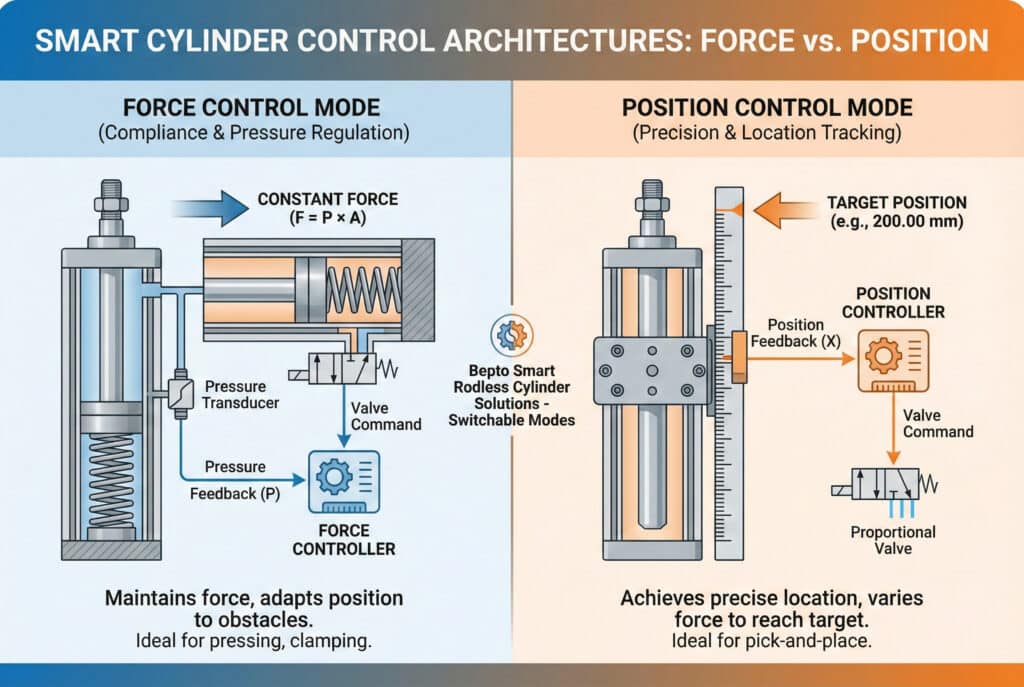
Режим регулювання сили регулює тиск або вихідну силу інтелектуального циліндра для підтримки постійної сили штовхання/тягнення незалежно від положення, що ідеально підходить для операцій пресування, затискання та складання. Режим регулювання положення зосереджується на досягненні та підтримці точного положення каретки вздовж ходу, що ідеально підходить для завдань підйому та переміщення, сортування та позиціонування. Вибір залежить від того, чи у вашому застосуванні пріоритетним є “сила” (сила) чи “точне положення” (положення) циліндра.
Минулого місяця я консультував Рейчел, інженера-технолога на автомобільному заводі в Клівленді, штат Огайо. Її команда використовувала регулювання положення для процесу встановлення дверних панелей, але панелі тріскалися через нерівномірне прикладання сили. Після того, як ми перевели її інтелектуальний безштокний циліндр Bepto в режим регулювання сили з зворотним зв'язком по тиску, рівень браку знизився з 8% до менше ніж 0,5%. Розуміння того, коли використовувати кожен режим, є критично важливим для успіху застосування. 💡
Зміст
- У чому полягає фундаментальна різниця між контролем сили та положення?
- Коли слід використовувати режим контролю сили в пневматичних системах?
- Коли режим керування положенням є кращим вибором?
- Чи можна поєднати обидва режими керування в гібридних системах?
У чому полягає фундаментальна різниця між контролем сили та положення?
Розуміння основної відмінності між цими філософіями управління є необхідним для правильного застосування інженерії. ⚙️
Режим управління силою використовує датчики тиску або моніторинг струму для регулювання вихідної сили циліндра, підтримуючи постійну силу штовхання/тяги навіть при зміні положення або появі перешкод. Режим управління положенням використовує лінійні енкодери1 або магнітні датчики для відстеження та контролю положення каретки з точністю, як правило, від 0,01 до 0,5 мм, надаючи пріоритет точному позиціонуванню над стабільністю сили. Кожен режим оптимізує різні параметри продуктивності відповідно до вимог застосування.
Основи контуру управління
Архітектура управління силою
У режимі контролю сили система постійно контролює:
- Датчики тиску: Вимірювання тиску в камері в режимі реального часу
- Розрахунок сил: F = P × A (тиск × площа поршня)
- Зворотний зв'язок: Регулює положення клапана для підтримки заданого зусилля
- Відповідність: Положення циліндра змінюється залежно від характеристик заготовки
Контролер не цікавить, де знаходиться циліндр — важливо лише, щоб він застосовував правильну силу.
Архітектура управління положенням
Системи контролю положення зосереджуються на місцезнаходженні:
- Лінійний енкодер: Відстежує абсолютне або інкрементне положення
- Помилка позиціонування: Обчислює різницю від цільового значення
- Профілювання швидкості: Контролює прискорення та уповільнення
- Зміна сили: Вихідна сила змінюється залежно від навантаження та тертя
Порівняння основних показників ефективності
| Характеристика | Контроль над силою | Контроль положення |
|---|---|---|
| Первинний зворотний зв'язок | Тиск/Сила | Позиція/Місцезнаходження |
| Типова точність | ±2-5% цільової сили | ±0,01–0,5 мм |
| Реакція на перешкоди | Зберігає силу, припиняє рух | Збільшує силу для досягнення положення |
| Найкраще для дотримання вимог | Чудово. | Бідолаха. |
| Повторюваність | Сила: Відмінна / Позиція: Змінна | Положення: Відмінне / Сила: Змінна |
| Вартість системи | Помірний | Помірний-високий |
У Bepto ми пропонуємо інтелектуальні безштокні циліндри з обома режимами керування, що дозволяє інженерам вибирати оптимальну стратегію для конкретного застосування. Наші системи можуть навіть перемикатися між режимами під час різних фаз одного циклу. 🔄
Вимоги до датчиків
Потреби в контролі сили:
- Перетворювачі тиску (типовий діапазон 0-10 бар)
- Пропорційні або сервоклапани2 для точного регулювання тиску
- Швидкі контури регулювання (час циклу 1-5 мс)
Потреби в управлінні положенням:
- Лінійні датчики положення (магнітні, оптичні або магнітострикційні)
- Відгук з високою роздільною здатністю (0,01-0,1 мм)
- Прогнозні профілі руху для плавного прискорення
Коли слід використовувати режим контролю сили в пневматичних системах?
Деякі програми абсолютно вимагають контролю сили для забезпечення якості та безпеки. 🛡️
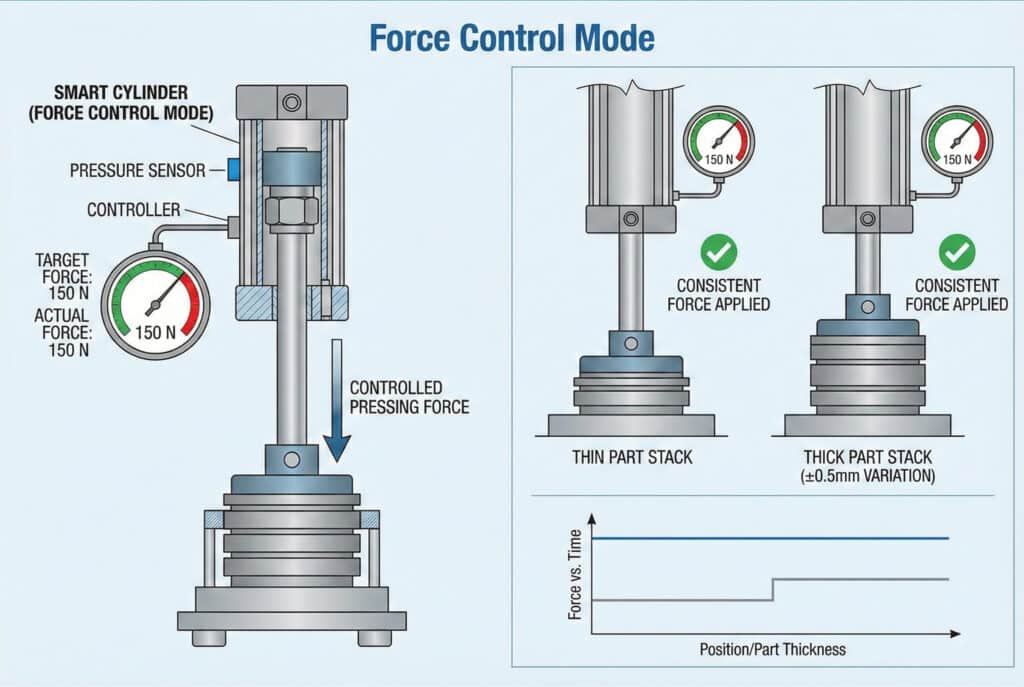
Режим контролю сили ідеально підходить для застосувань, що вимагають: постійної сили натиску незалежно від варіацій товщини деталі (допуск ±0,5 мм), сумісних операцій складання, де надмірна сила може спричинити пошкодження, тестування якості, що вимірює криві зусилля-переміщення3, м'яке поводження з делікатними продуктами та адаптивні процеси, в яких властивості заготовок можуть змінюватися. Будь-яке застосування, в якому “сила” має більше значення, ніж “точне місце”, виграє від контролю сили.
Ідеальні застосування системи контролю сили
Операції з монтажу та пресування
Збірка з пресовим кріпленням: Встановлення підшипників, втулок або з'єднувачів вимагає контрольованого зусилля, щоб уникнути пошкодження. Контроль зусилля забезпечує рівномірне вставлення без надмірного натискання.
Збірка із замиканням: Пластикові компоненти потребують точного зусилля для закріплення затискачів без пошкодження. Контроль зусилля забезпечує “відчуття”, яке запобігає дефектам.
Тиск подачі клею: Підтримка постійної сили на поршнях дозуючого механізму забезпечує рівномірний потік матеріалу незалежно від змін в'язкості.
Реальна історія успіху
Томас, менеджер з виробництва на заводі побутової електроніки в Сан-Хосе, Каліфорнія, зіткнувся з частотою відмов 12% у процесі складання компонентів смартфонів. Його циліндри з позиційним керуванням вдавлювали компоненти на фіксовану глибину, але через варіації товщини компонентів деякі деталі отримували недостатню силу, а інші тріскалися від надмірної сили. Після переходу на безштокні циліндри Bepto з контролем сили, налаштовані на 150 Н, його процес автоматично адаптувався до варіацій деталей — кількість дефектів знизилася до 0,81 TP3T, а час циклу фактично покращився на 0,2 секунди. 📱
Переваги управління силою
- Адаптивний до змін: Автоматично компенсує частину накопичення допусків4
- Запобігає пошкодженню: Припиняє збільшення сили, коли ціль досягнута
- Якісний зворотній зв'язок: Дані Force забезпечують можливість моніторингу процесів
- Дбайливе поводження: Ідеально підходить для крихких матеріалів (скло, кераміка, електроніка)
Категорії заявок
| Промисловість | Типове застосування | Діапазон цільової сили | Ключова перевага |
|---|---|---|---|
| Автомобільна промисловість | Встановлення ущільнювача | 50-200 Н | Надійне ущільнення без пошкоджень |
| Електроніка | Вставка компонентів на друковану плату | 10-80 Н | Запобігає розтріскуванню дошки |
| Пакування | Закриття картонної коробки | 100-400 Н | Адаптується до змін рівня наповнення |
| Медичне обладнання | Катетерний комплект | 5-30 Н | Забезпечує цілісність без деформації |
| Харчова промисловість | Пресування/формування продукту | 50-500 Н | Рівномірний контроль щільності |
Коли режим керування положенням є кращим вибором?
Контроль положення домінує в додатках, де точність визначення місцезнаходження має першочергове значення. 🎯
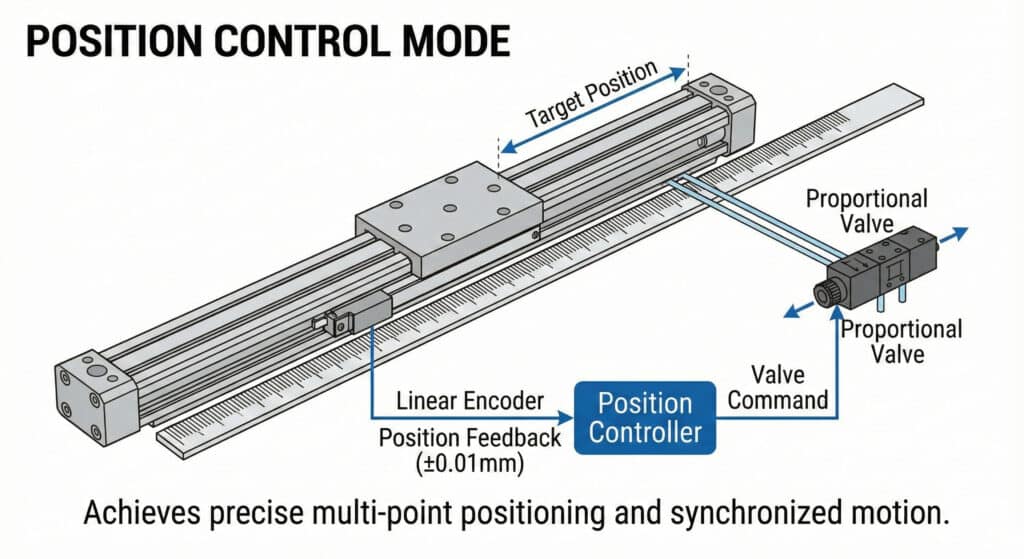
Режим керування положенням є необхідним, коли: потрібна абсолютна точність позиціонування в межах ±0,1 мм, необхідні кілька положень зупинки вздовж ходу, критично важливим є синхронізований рух з іншими осями, високошвидкісні переміщення від точки до точки вимагають оптимізованих профілів швидкості або застосування передбачає підбирання, розміщення, сортування або точне переміщення матеріалу. Виробничі процеси, що вимагають повторюваних положень незалежно від коливань навантаження, найбільше виграють від керування положенням.
Області досконалості управління позицією
Операції «підніми та поклади»
Роботизована збірка та обробка матеріалів вимагають, щоб циліндри повторно переміщалися в точні місця:
- Багатопозиційні упори: Один циліндр обслуговує кілька станцій протягом свого ходу.
- Синхронізований рух: Координація з конвеєрами, роботами або іншими осями
- Висока швидкість і точність: Зберігає точність навіть при швидкості понад 2 м/с
Застосування точного позиціонування
Завантаження верстатів з ЧПУ: Деталі повинні бути вирівняні з точністю до 0,05 мм для забезпечення точності обробки.
Оптична збірка: Для забезпечення якості фокусування позиціонування об'єктива повинно мати повторюваність менше 0,1 мм.
Інспекційні системи: Розташування камери потребує стабільного місця для аналізу зображення
Оптимізація профілю руху
Контроль положення дозволяє реалізувати складні стратегії руху:
- Прискорення S-кривої5: Плавний пуск/зупинка зменшує механічний удар
- Змішування швидкості: Переходи між рухами без зупинки
- Електронна передача: Математично синхронізується з головною віссю
- Літаючі ножиці: Відповідає швидкості руху стрічки під час різання
Переваги контролю положення
- Абсолютна точність: Досягає цілі з точністю до мікронів
- Багатоточковий режим роботи: Необмежена кількість зупинок по довжині ходу
- Передбачувані терміни: Стабільність тривалості циклу для планування пропускної здатності
- Синхронізація: Координує складний багатоосьовий рух
Типові технічні характеристики
Сучасні інтелектуальні циліндри без штока з контролем положення забезпечують:
- Точність позиціонування: від ±0,05 мм до ±0,5 мм залежно від датчика
- Повторюваність: ±0,01 мм для магнітострикційних систем
- Максимальна швидкість: 2-3 м/с з контрольованим уповільненням
- Резолюція: 0,01 мм або краще з високоякісними енкодерами
Наші безштокні циліндри Bepto з позиційним регулюванням забезпечують продуктивність, еквівалентну OEM, за значно нижчою ціною, а також повну сумісність для заміни основних брендів. Ми допомогли десяткам підприємств модернізувати застарілі системи, одночасно зменшивши витрати на запасні частини на 35%. 💰
Чи можна поєднати обидва режими керування в гібридних системах?
У складних додатках часто потрібно перемикатися між режимами керування під час різних фаз циклу. 🔀
Гібридне управління силою та положенням дозволяє інтелектуальним циліндрам використовувати управління положенням для швидкого наближення, потім переходити до управління силою для виконання фактичної операції, а потім повертатися до управління положенням для відведення. Таке поєднання забезпечує оптимальний час циклу (швидке позиціонування) з гарантією якості (контрольоване застосування сили). Для реалізації цього потрібно використовувати циліндри з датчиками тиску та положення, а також контролери, здатні перемикатися між режимами за 10–50 мс.

Гібридні стратегії управління
Послідовне перемикання режимів
Фаза 1 – Швидкий підхід (контроль положення):
- Швидко переміститися в положення, близьке до контакту
- Висока швидкість (1,5-2 м/с) для оптимізації часу циклу
- Зупиніться за 2-5 мм до контакту з заготовкою
Фаза 2 – Робота (контроль сили):
- Перейти в режим примусового керування
- Застосовуйте контрольоване зусилля пресування/збирання
- Контролюйте криву «сила-переміщення» для забезпечення якості
Фаза 3 – Втягування (контроль положення):
- Повернення до вихідного або проміжного положення
- Оптимізований профіль швидкості для наступного циклу
Гібридна програма в реальному світі
Виробник медичного обладнання в Міннеаполісі, штат Міннесота, використовує саме цю стратегію для складання кінчиків катетерів. Розумний циліндр Bepto швидко позиціонується (режим позиціонування) на станції складання за 0,4 секунди, переходить у режим сили, щоб застосувати точно 18 Н для термофіксації кінчика (0,6 секунди), а потім відсувається під контролем позиціонування (0,3 секунди). Загальний час циклу: 1,3 секунди без дефектів за 2 мільйони циклів. 🏥
Вимоги до впровадження
| Компонент | Специфікація | Мета |
|---|---|---|
| Подвійні датчики | Тиск + положення | Увімкнути обидва режими керування |
| Швидкий контролер | Перемикання режимів за менше ніж 10 мс | Плавний перехід |
| Серво/пропорційний клапан | Високочастотна характеристика | Підтримує обидва типи управління |
| Розширене програмне забезпечення | Логіка державного механізму | Керує переходами між режимами |
Переваги гібридного підходу
- Оптимізована тривалість циклу: Швидкі рухи, де точність не є критичною
- Забезпечення якості: Контрольована сила там, де це важливо
- Моніторинг процесу: Зареєстровані дані про положення та силу
- Гнучкість: Автоматично адаптуватися до змін продукту
Система прийняття рішень
Використовуйте контроль сили, коли:
- Товщина/висота деталі варіюється >0,5 мм
- Властивості матеріалу є несумісними
- Можливе пошкодження від надмірного зусилля
- Якість процесу залежить від застосування сили
Використовуйте контроль положення, коли:
- Абсолютна точність визначення місцезнаходження має вирішальне значення
- Необхідні кілька положень зупинки
- Необхідна синхронізація з іншим обладнанням
- Оптимізація тривалості циклу вимагає високої швидкості
Використовуйте гібридне управління, коли:
- Застосування має чіткі етапи позиціонування та роботи
- Швидкість і якість мають вирішальне значення
- Моніторинг процесу вимагає даних як про силу, так і про положення
- Бюджет дозволяє використовувати передові інтелектуальні циліндрові системи
Висновок
Вибір між режимами управління силою та управлінням положенням — або впровадження гібридних стратегій — безпосередньо впливає на якість продукції, ефективність циклу та технологічні можливості, що робить це фундаментальне рішення одним з найважливіших у проектуванні пневматичних систем для сучасного виробництва. 🚀
Часті запитання про режими управління інтелектуальним циліндром
Питання: Чи можна модернізувати мої існуючі циліндри, щоб додати контроль сили або положення?
Модернізація залежить від поточної конструкції циліндра. Стандартні циліндри можна модернізувати за допомогою зовнішніх датчиків положення (магнітних смуг, датчиків з тяговим тросом) для контролю положення, але для контролю сили необхідні перетворювачі тиску в отворах циліндра та пропорційний клапан управління. Повна модернізація зазвичай коштує 60-80% від ціни нового інтелектуального циліндра, тому заміна часто є більш економічно вигідною. Bepto пропонує економічно вигідні заміни інтелектуальних безштоквих циліндрів, сумісні з основними інтерфейсами кріплення OEM.
Питання: Наскільки точність регулювання сили залежить від стабільності тиску повітря?
Точність регулювання сили прямо пропорційна стабільності тиску подачі, оскільки F = P × A. Коливання тиску ±0,2 бар при тиску подачі 6 бар спричиняє зміну сили ±3,31 TP3T. Для критичних застосувань, що вимагають точності сили ±11 TP3T, використовуйте регулятори тиску зі стабільністю ±0,05 бар і розгляньте можливість застосування замкнутого контуру регулювання тиску. Регулювання положення менш чутливе до коливань тиску, оскільки воно регулює положення клапана для досягнення цільового положення незалежно від тиску.
Питання: Який час відгуку можна очікувати при перемиканні між режимами керування?
Сучасні інтелектуальні контролери циліндрів перемикають режими за 10-50 мс залежно від архітектури системи. Фактична фізична реакція (зміна руху циліндра) займає додаткові 20-100 мс залежно від часу реакції клапана та динаміки пневматичної системи. Для застосувань, що вимагають частого перемикання режимів (>5 разів на секунду), переконайтеся, що ваш контролер і клапани розраховані на роботу з високою частотою, щоб уникнути погіршення продуктивності.
Питання: Чи споживають циліндри з регулюванням сили більше повітря, ніж циліндри з регулюванням положення?
Регулювання сили зазвичай споживає на 10-20% більше повітря, оскільки воно постійно модулює тиск для підтримки заданої сили, тоді як регулювання положення використовує повний тиск для переміщення, а потім утримує положення з мінімальним потоком. Однак регулювання сили запобігає марнуванню енергії через надмірний тиск, що може компенсувати цю різницю. Фактичне споживання значною мірою залежить від робочого циклу застосування — проконсультуйтеся з нашою інженерною командою Bepto для отримання конкретних розрахунків на основі параметрів вашого процесу.
Питання: Чи може один інтелектуальний циліндр контролювати як розтягуючу (тягнучу), так і стискаючу (штовхаючу) силу?
Так, сучасні інтелектуальні циліндри з датчиками тиску в обох камерах можуть контролювати силу в обох напрямках. Для цього потрібні подвійні перетворювачі тиску та двонаправлений розрахунок сили (F = P₁×A₁ – P₂×A₂ з урахуванням різниці площ штоків). Ця функція корисна для таких застосувань, як випробування матеріалів, регулювання натягу полотна та двонаправлене складання. Стандартні реалізації зазвичай контролюють силу тільки в одному напрямку (зазвичай штовхаючи), щоб зменшити вартість і складність.
-
Посібник, що пояснює, як лінійні енкодери перетворюють механічний рух в електричні сигнали для точного позиціонування. ↩
-
Огляд того, як пропорційні та сервоклапани регулюють витрату та тиск у гідравлічних системах. ↩
-
Технічний ресурс з інтерпретації кривих «сила-переміщення» для аналізу властивостей матеріалів та механічних характеристик. ↩
-
Інженерний посібник з аналізу накопичення допусків та його впливу на посадку і функціональність збірки. ↩
-
Порівняння профілів руху, що пояснюють, як прискорення S-кривої зменшує механічні вібрації та ривки. ↩
