
Sissejuhatus
Kas olete väsinud rikkis osade asendamisest? läheduslülitid1 ja tegeleda ebausaldusväärse lõpp-asendi tuvastamisega? 🔧 Traditsioonilised mehaanilised ja magnetilised lülitid kuluvad, nihkuvad paigast ja tekitavad hooldusprobleeme, mis maksavad tootmisele aega ja raha. Karmi keskkonna tingimused, nagu vibratsioon, saastatus või äärmuslikud temperatuurid, muudavad tavapärase lülitipõhise tuvastamise veelgi problemaatilisemaks.
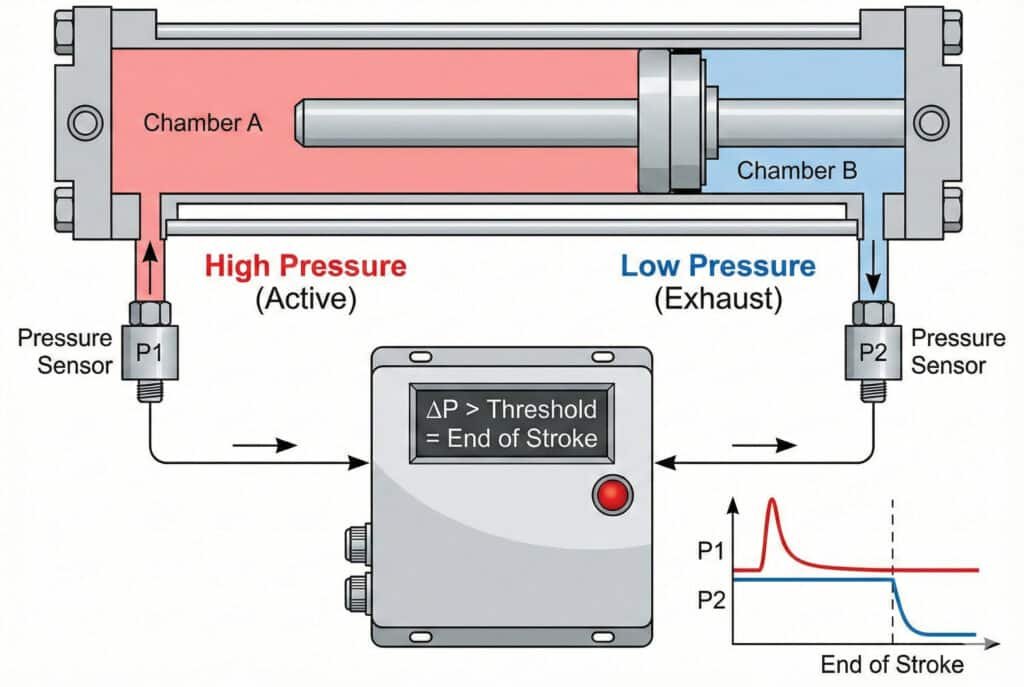
Diferentsiaalrõhuandur tuvastab silindri töötsükli lõppasendi, jälgides rõhu erinevust kambri A ja kambri B vahel. Kui kolb jõuab kummagi otsa, tõuseb aktiivse kambri rõhk järsult, samal ajal kui väljalaske kambri rõhk langeb peaaegu atmosfäärirõhuni, tekitades iseloomuliku rõhu signaali, mis näitab asendit usaldusväärselt ilma silindri korpusele paigaldatud füüsiliste lülitite, magnetite või anduriteta.
Kaks kuud tagasi rääkisin Keviniga, kes töötab hooldusjuhina terasetöötlemisettevõttes Pittsburghis, Pennsylvanias. Tema ettevõttes vahetati keskmiselt 15 läheduslülitit kuus, kuna töökeskkond oli raske ja vibratsiooniderohke. vardata silinder2 süsteemid. Pärast diferentsiaalrõhuandurite paigaldamist tema Bepto balloonidele vähenes lülititega seotud seisakuaeg nullini ja tema hooldusmeeskond suunas 20 tundi kuus väärtuslikumatele ülesannetele. Las ma näitan teile, kuidas see elegantne lahendus toimib. 💡
Sisukord
- Kuidas töötab diferentsiaalrõhuandur asukoha tuvastamiseks?
- Millised on peamised eelised võrreldes traditsioonilise lülituspõhise tuvastamisega?
- Kuidas rakendada diferentsiaalrõhu mõõtmist pneumaatilistes süsteemides?
- Millised rakendused saavad rõhupõhisest asukoha tuvastamisest kõige enam kasu?
Kuidas töötab diferentsiaalrõhuandur asukoha tuvastamiseks?
Silindri töötamise ajal tekkiva surve käitumise mõistmine selgitab, miks see meetod nii usaldusväärselt toimib. 📊
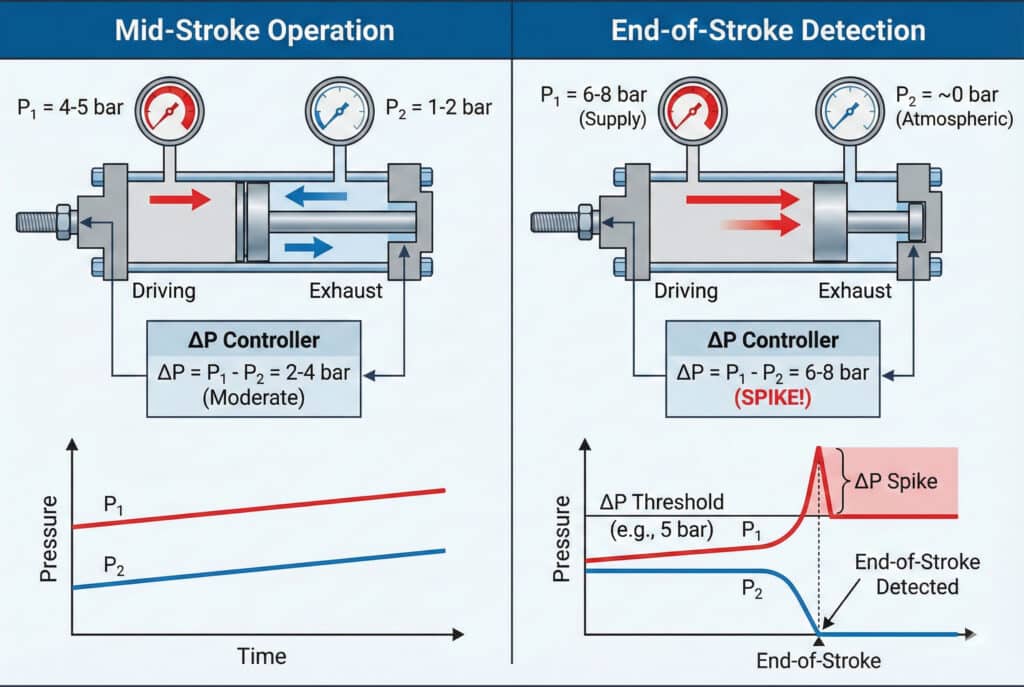
Diferentsiaalrõhuandur kasutab ära pneumaatiliste silindrite füüsikalisi põhimõtteid: töötsükli keskel säilitavad mõlemad kambrid mõõduka rõhu (tavaliselt 3–5 baari ajamisel ja 1–2 baari väljalaskmisel), kuid töötsükli lõpus tõuseb ajamiskambri rõhk järsult töörõhuni (6–8 baari), samal ajal kui väljalaskekambri rõhk langeb peaaegu nullini. Jälgides pidevalt rõhu vahet (ΔP = P₁ – P₂), tuvastab süsteem, kui see diferentsiaal ületab künnisväärtuse (tavaliselt 4–6 baari), näidates usaldusväärselt töötsükli lõppu ilma füüsiliste positsioonanduriteta.
Rõhu signatuuride füüsika
Surve käitumine löögi keskel
Tavalise silindri liikumise ajal:
- Juhikamber: 4–5 baari (piisav koormuse ja hõõrdumise ületamiseks)
- Heitgaasikamber: 1–2 baari (voolu piiramisest tulenev vasturõhk)
- Diferentsiaalrõhk: 2–4 baari (mõõdukas erinevus)
- Kolvi kiirus: Pidev või kiirenev
Löögi lõpu rõhu käitumine
Kui kolb puutub kokku otsapolstri või mehaanilise piiratiga:
- Juhikamber: Tõuseb kiiresti, et tagada rõhk (6–8 baari)
- Heitgaasikamber: Langeb atmosfäärisurveni (0–0,2 baari)
- Diferentsiaalrõhk: Kõrgeim 6–8 baari (maksimaalne erinevus)
- Kolvi kiirus: Null (mehaaniline stopp)
See dramaatiline rõhu muutus on selgelt märgatav ja toimub 50–100 ms jooksul pärast töötsükli lõppu.
Rõhu jälgimise meetodid
| Meetod | Reageerimisaeg | Täpsus | Kulud | Parim rakendus |
|---|---|---|---|---|
| Analoogsurveandurid | 5-20ms | Suurepärane | Keskmine | Täpsed juhtimissüsteemid |
| Digitaalsed rõhureleed | 10-50ms | Hea | Madal | Lihtne sisse/välja lülitamise tuvastamine |
| Rõhuandurid | 20-100ms | Suurepärane | Kõrge | Andmete salvestamine/jälgimine |
| Vaakumlülitid (väljalaske pool) | 20-80ms | Hea | Madal | Ühepoolne tuvastamine |
Signaalitöötluse loogika
Kontroller rakendab lihtsat loogikat:
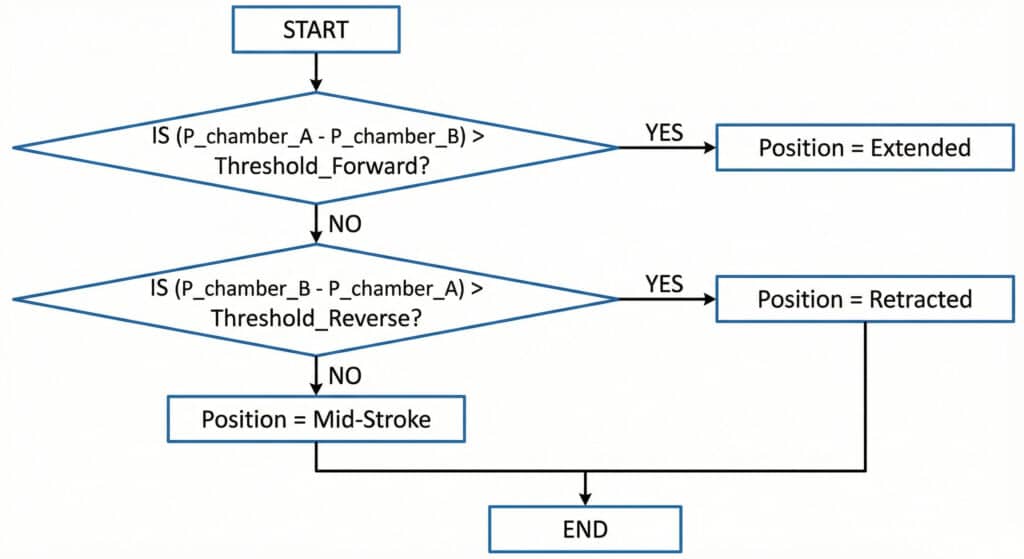
Bepto on seda lähenemisviisi tuhandete paigalduste käigus täiustanud. Meie tehniline meeskond aitab klientidel määrata optimaalsed künnisväärtused vastavalt nende konkreetsele ballooni suurusele, koormustingimustele ja toite rõhule, saavutades tavaliselt 99,9%+ tuvastamise usaldusväärsuse. 🎯
Ajakava kaalutlused
Avastamise viivitus: 50–150 ms füüsilisest peatumisest signaali kinnitamiseni
Debounce aeg: 20–50 ms, et filtreerida rõhu kõikumised
Kokku vastused: tüüpiline 70–200 ms (võrreldav läheduslülititega)
See reageerimisaeg on piisav enamiku tööstusautomaatika rakenduste jaoks, kus tsükli kestus ületab 1 sekundi.
Millised on peamised eelised võrreldes traditsioonilise lülituspõhise tuvastamisega?
Diferentsiaalrõhu mõõtmine pakub veenvaid eeliseid, mis muudavad süsteemi töökindlust. ✨
Peamised eelised on järgmised: nulliline mehaaniline kulumine, kuna puuduvad liikuvad lülituskomponendid; vastupidavus õli, tolmu, jahutusvedeliku või prahi saastele, mis võiksid lüliteid rikkuda; puuduvad joondamisprobleemid või kinnitusklambrite rikked; töötab äärmuslikes temperatuurides (-40 °C kuni +150 °C), mis ületavad lüliti nimiväärtusi; väiksem juhtmestiku keerukus, kuna on ainult kaks rõhuliini, mitte mitu lülitikaablit; ja sisemine redundantsus, kuna samad andurid tuvastavad mõlemad lõppasendid. Hoolduskulud vähenevad 60–80% võrreldes lülititel põhinevate süsteemidega.
Usaldusväärsuse parandamine
Tavaliste rikkeviiside kõrvaldamine
Läheduslüliti rikked kõrvaldatud:
- Magnetvälja nõrgenemine (Reed lülitid3)
- Anduri paigalduse hälve vibratsiooni tõttu
- Kaabli kahjustused painutamisest
- Ühenduste korrosioon rasketes tingimustes
- Elektrooniliste komponentide rike temperatuuri tsüklite tõttu
Mehaaniliste lülitite rikked kõrvaldatud:
- Kontaktkulumine ja punktkorrosioon
- Kevadine väsimus
- Aktuaatori käepideme murdumine
- Kinnitusklambri lahtitulek
Keskkonnakindlus
Diferentsiaalrõhuandurid toimivad hästi tingimustes, mis kahjustavad tavalisi lüliteid:
Kõrge saastatuse tasemega keskkonnad: Toiduainete töötlemine, kaevandamine, keemiatehased
Ekstreemsed temperatuurid: Valukojad, sügavkülmikud, välistingimustes kasutatavad seadmed
Kõrge vibratsioon: Metalli vormimine, stantsimine, rasketehnika
Pesemiskohtade alad: Farmaatsia, toiduained ja joogid, puhtad ruumid
Plahvatusohtlik atmosfäär: Ohtlikes tsoonides vähendatud elektrilised komponendid
Reaalmaailma usaldusväärsuse andmed
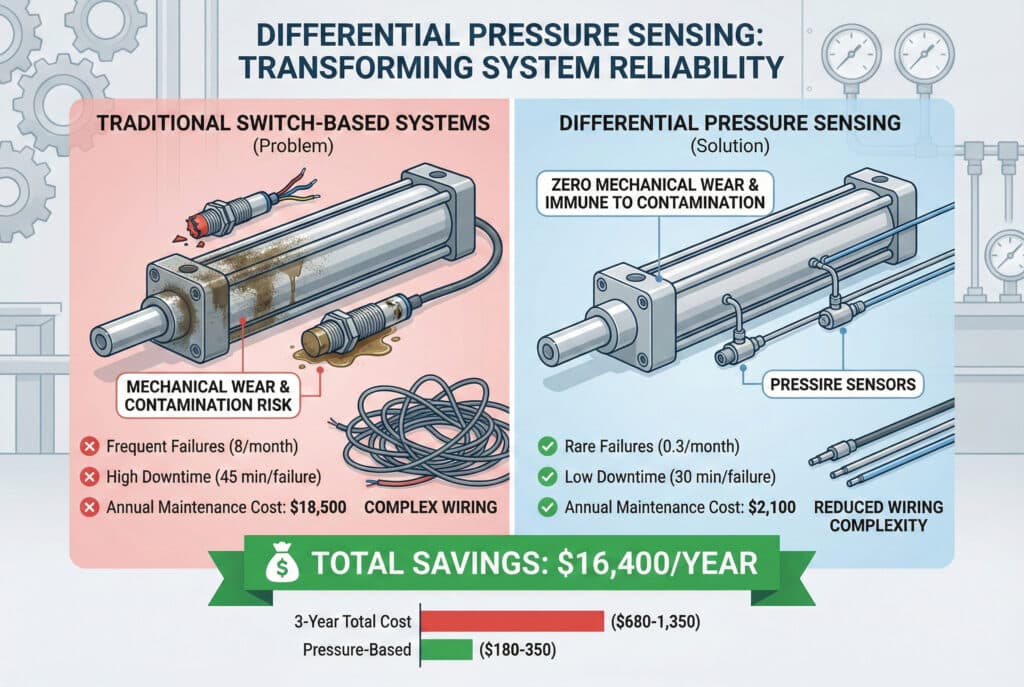
Linda, toiduainete töötlemisettevõtte insener Chicagos, Illinois'is, jälgis rikkeandmeid enne ja pärast rõhupõhise tuvastamise rakendamist 40 Bepto vardaeta silindril:
Enne (lüliti põhinev tuvastamine):
- Keskmine rikkeid: 8 kuus
- Rikke põhjustatud seisakuaeg: 45 minutit
- Aastane hoolduskulu: $18 500
Pärast (rõhupõhine tuvastamine):
- Keskmine rikkeid: 0,3 kuus (ainult rõhuanduri probleemid)
- Rikke kestus: 30 minutit
- Aastane hoolduskulu: $2100
- Kokkuhoid kokku: $16 400/aastas 💰
Tasuvusanalüüs
| Tegur | Lüliti-põhine | Rõhupõhine | Advantage |
|---|---|---|---|
| Esialgne kulu | $80-150/silinder | $120-200/silinder | Lüliti-põhine |
| Iga-aastane hooldus | $200-400/silinder | $20-50/silinder | Rõhupõhine |
| MTBF (keskmine rikkevaheline aeg) | 12-24 kuud | 60–120 kuud | Rõhupõhine |
| 3-aastane kogukulu | $680-1,350 | $180-350 | Rõhupõhine |
| Seisakud (3 aastat) | 2–4 ühe ballooni kohta | 0–1 silindri kohta | Rõhupõhine |
Diferentsiaalrõhuanduri paigaldamise tasuvusaeg on tavaliselt 8–18 kuud, sõltuvalt rakenduse raskusastmest.
Kuidas rakendada diferentsiaalrõhu mõõtmist pneumaatilistes süsteemides?
Praktiline rakendamine nõuab õige komponentide valikut ja süsteemi konfiguratsiooni. 🛠️
Diferentsiaalrõhu mõõtmise rakendamiseks on vaja: kahte rõhuandurit või ühte diferentsiaalrõhuandurit (tavaliselt vahemikus 0–10 bar), paigaldus-T-liitmikke mõlemas silindri avas, sobivat signaali töötlemist (4–20 mA või 0–10 V kuni PLC4 analoogsisend), kontrollerilogika rõhusignaalide töötlemiseks ja künniste seadistamiseks ning esmane kalibreerimine tegelikes koormustingimustes. Enamik rakendusi lisab komponente $100-150, kuid eemaldab lülitid $80-120 ja juhtmestiku, mistõttu netokulu suurenemine on minimaalne.
Riistvarakomponendid
Rõhuanduri valik
Variant 1: Kahe absoluutrõhu anduriga
- Üks andur silindrikambri kohta
- Vahemik: 0–10 baari (0–150 psi)
- Väljund: 4–20 mA või 0–10 V
- Eelis: annab individuaalsed kambri rõhuandmed
- Hind: $40-80 tükk
Variant 2: Üks diferentsiaalrõhuandur
- Mõõdab P₁ – P₂ otse
- Vahemik: ±10 baari diferentsiaal
- Väljund: 4–20 mA või 0–10 V
- Eelis: lihtsam signaalitöötlus
- Maksumus: $80-150
Variant 3: Digitaalsed rõhureleed
- Reguleeritav seadistusväärtus (tavaliselt 4–6 baari)
- Väljund: Digitaalne sisse/välja signaal
- Eelis: madalaim hind, lihtne PLC sisend
- Hind: $25-50 tükk
Paigalduse konfiguratsioon
Torustiku paigutus
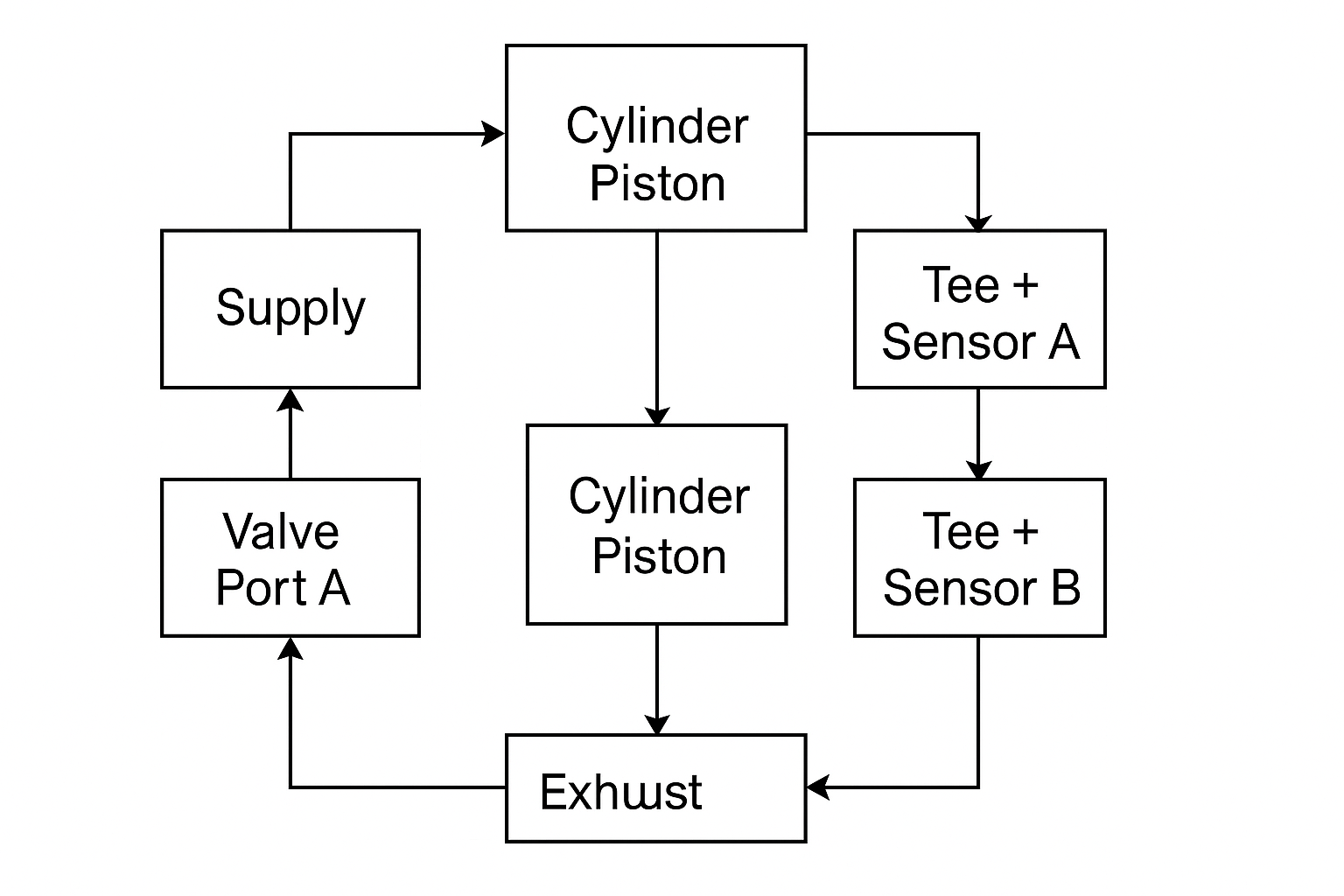
Pneumaatilise silindri voolutee skeem koos ventiiliportide ja rõhuanduritega
Olulised paigalduspunktid:
- Paigaldage andurid silindri lähedale (300 mm raadiuses), et vähendada rõhu viivitust.
- Kasutage andurite ühendamiseks 6 mm või 1/4″ torusid.
- Paigaldage andurid silindri kohale, et vältida niiskuse kogunemist.
- Kaitse andureid otsese löögi või vibratsiooni eest
Kontrollerite programmeerimine
PLC analoogsisendi konfiguratsioon
4–20 mA andurite puhul vahemikuga 0–10 bar:
- 4 mA = 0 bar
- 20 mA = 10 bar
- Skaalafaktor: 0,625 bar/mA
Künnise seadmise protseduur
- Käivita silinder täisliikumisega normaalse koormuse korral
- Salvestage rõhu väärtused mõlemas otsas
- Arvuta diferentsiaal mõlemas otsas (tavaliselt 5–7 baari)
- Künnise seadmine minimaalse diferentsiaali juures 70–80% (tavaliselt 4–5 baari)
- Testige 50 tsüklit usaldusväärse tuvastamise kontrollimiseks
- Künnise reguleerimine kui esinevad valehäired
Tüüpiliste probleemide lahendamine
| Probleem | Tõenäoline põhjus | Lahendus |
|---|---|---|
| Vale lõpp-signaalid | Künnis liiga madal | Suurendage läve 0,5–1 baari võrra |
| Lõpetamata löök | Künnis liiga kõrge | Vähendage läve 0,5 baari võrra |
| Ebastabiilsed signaalid | Rõhu kõikumine | Lisa 50 ms debounce filter |
| Aeglane reageerimine | Pikad torud anduriteni | Lühendage andurite ühendusi |
| Aja jooksul toimuv triivimine | Anduri kalibreerimine | Kalibreerige andurid uuesti või vahetage need välja |
Meie Bepto insenerimeeskond pakub üksikasjalikke rakendusjuhendeid ja võib tarnida eelkonfigureeritud rõhutundlikke pakette, mis integreeruvad sujuvalt meie vardaeta silindrisüsteemidega. Oleme aidanud üle 200 rajatisel edukalt üle minna lülituspõhiselt rõhupõhisele tuvastamisele. 📋
Millised rakendused saavad rõhupõhisest asukoha tuvastamisest kõige enam kasu?
Teatavates tööstuskeskkondades on diferentsiaalrõhu mõõtmine toonud kaasa märkimisväärseid parandusi. 🏭
Kõrgeima investeeringutasuvusega rakendused hõlmavad: raskeid keskkonnatingimusi, kus esineb saastumist, niiskust või äärmuslikke temperatuure, kus lülitid riknevad sageli; tugeva vibratsiooniga keskkondi, nagu metallitöötlus või rasketehnika; toiduainete/farmaatsiatoodete pesemiskohti, mis nõuavad sagedast puhastamist; ohtlikke kohti, kus elektriliste komponentide vähendamine parandab ohutust; ning kõrge usaldusväärsusega rakendusi, kus seisakukulud ületavad $1000/tund. Iga rajatis, kus asendatakse rohkem kui 2 lülitit silindri kohta aastas, peaks hindama rõhupõhist tuvastamist.
Tööstusspetsiifilised rakendused
Toiduainete ja jookide töötlemine
Väljakutsed: Sagedased pesemised, äärmuslikud temperatuurid, sanitaarnõuded
Eelised: Ei ole baktereid soodustavaid pragusid, IP69K5-reitinguga rõhuandurid saadaval
Tüüpiline investeeringutasuvus: 6-12 kuud
Autotööstus
Väljakutsed: Keevituspritsmed, jahutusvedeliku pihustamine, kõrge tootlikkus
Eelised: Vähendab pritsmetest põhjustatud lülitite kahjustusi, vähendab liini seisakuid
Tüüpiline investeeringutasuvus: 8–15 kuud
Terase ja metalli töötlemine
Väljakutsed: Äärmuslik vibratsioon, kuumus, katlakivi ja praht
Eelised: Ei ole mehaanilisi komponente, mis võiksid lahti raputada või ummistuda.
Tüüpiline investeeringutasuvus: 4–10 kuud (kõige kiirem tasuvus karmide tingimuste tõttu)
Keemia ja farmaatsia
Väljakutsed: Korrosiivsed keskkonnad, plahvatuskindluse nõuded, valideerimine
Eelised: Ohtlikes tsoonides vähem elektrilisi komponente, lihtsam valideerimine
Tüüpiline investeeringutasuvus: 12–18 kuud
Kulude põhjendamise kalkulaator
Aastane lüliti asendamise maksumus = (silindrite arv) × (riked aastas) × ($80 osad + $120 tööjõud)
Näide: 50 ballooni × 2 riket aastas × $200 = $20 000/aastas
Rõhuanduri uuendamise maksumus = 50 ballooni × $150 netokasv = $7500 ühekordne
Tagasimakseperiood = $7500 ÷ $20 000/aastas = 4,5 kuud ✅
Tulemuslikkuse näitajad
Diferentsiaalrõhu mõõtmist rakendavad seadmed teatavad tavaliselt järgmist:
- Lülitite rikked: Vähendatud 90-95% võrra
- Hooldustööjõud: Vähendatud 60-70% võrra
- Vale signaalid: Vähendatud 80–90% võrra
- Süsteemi tööaeg: Parandatud 1-3%
- Varuosade varu: Vähendatud $500-2000 võrra
Bepto on dokumenteerinud need parandused sadade paigalduste puhul. Meie rõhutundlikud lahendused sobivad nii uute balloonide paigalduste kui ka olemasolevate süsteemide moderniseerimise puhul, pakkudes paindlikkust järkjärguliseks rakendamiseks vastavalt eelarvele. 🚀
Kokkuvõte
Diferentsiaalrõhuanduriga kaob traditsioonilise lülituspõhise tööotsa tuvastamise usaldusväärsuse probleem ja hoolduskoormus, pakkudes paremat jõudlust rasketes tingimustes ning vähendades süsteemi elutsükli jooksul kogukulutusi 50–70% võrra. 💪
Korduma kippuvad küsimused diferentsiaalrõhu mõõtmise kohta
K: Kas diferentsiaalrõhuanduriga on võimalik tuvastada nii töötsükli keskel kui ka lõpus olevad asendid?
Standardne diferentsiaalrõhuandur tuvastab usaldusväärselt ainult lõppasendi positsioone, kus rõhu signatuur on selge. Keskasendi tuvastamiseks on vaja lisanduvaid andureid, nagu lineaarsed kodeerijad või magnetostriktiivsed positsiooniandurid, kuna liikumise ajal muutuvad rõhu erinevused koormuse, hõõrdumise ja kiiruse mõjul. Mõned arenenud süsteemid kasutavad siiski rõhu profiili, et hinnata ligikaudset positsiooni, kuigi selle täpsus on spetsiaalsete positsioonianduritega võrreldes madalam (tavaliselt ±10–20 mm).
K: Mis juhtub, kui ühes silindrikambris on aeglane õhuleke?
Väikesed lekked (voolukiirus alla 5%) ei mõjuta tavaliselt töötsükli lõpu tuvastamist, kuna töötsükli lõpus on rõhuvahe piisavalt suur, et ületada künniseid. Suuremad lekked võivad takistada nõuetekohast rõhu tõusu, põhjustades tuvastamisvigu, kuid see annab tegelikult diagnostilise eelise, hoiatades teid tihendi kulumisest enne täielikku riket. Jälgige aja jooksul suurenevaid tuvastamisviivitusi või künnise kohandusi kui varajasi lekkimise näitajaid.
K: Kas varustuse rõhu kõikumine mõjutab tuvastamise usaldusväärsust?
Jah, kuid minimaalne, kui künnised on õigesti seatud. Toite rõhu langus 7 barilt 5 barile vähendab proportsionaalselt löögi lõpu diferentsiaali, kuid signatuur jääb eristatavaks. Seadke künnised 60-70% diferentsiaalile, mõõdetuna minimaalse eeldatava toite rõhu juures, et säilitada usaldusväärsus. Süsteemid, mille toite rõhk on väga muutlik (±1 bar või rohkem), võivad saada kasu adaptiivsetest künnistest, mis skaaluvad mõõdetud toite rõhuga.
K: Kas ma saan olemasolevad balloonid varustada diferentsiaalrõhuanduritega?
Kindlasti – see on üks meetodi suurimaid eeliseid. Paigaldage lihtsalt T-liitmikud mõlema silindri avale, lisage rõhuandurid ja muudke oma PLC-programmi. Silindri lahtimonteerimine või muutmine ei ole vajalik. Bepto pakub moderniseerimiskomplekte, mis sisaldavad kõiki vajalikke komponente ja paigaldusjuhiseid. Tavaline moderniseerimisaeg on 30–45 minutit silindri kohta ja süsteem töötab mis tahes silindri marki või mudeliga.
K: Kuidas toimib diferentsiaalrõhu mõõtmine väga kiirete või väga aeglaste silindri kiiruste korral?
Töökindlus on suurepärane laias kiirusvahemikus (0,1–2,5 m/s). Kiiretel silindritel (>1,5 m/s) võib esineda veidi hilinenud tuvastamine (täiendavalt 20–50 ms) rõhusignaali reageerimisaega arvestades, kuid see on võrreldav läheduslüliti viivitustega. Väga aeglased silindrid (3 m/s) puhul, kus pneumaatiline viivitus muutub märkimisväärseks – sellised rakendused võivad nõuda hübriidset tuvastamist, mis ühendab rõhuanduri ja kiirete läheduslülititega.
-
Õppige, kuidas need kontaktivabad andurid toimivad objekti olemasolu tuvastamiseks. ↩
-
Mõista ruumi säästvate, pikendustangita koormusi liigutavate silindrite konstruktsiooni. ↩
-
Uurige reed-lülititega seotud tavalisi mehaanilisi ja magnetilisi probleeme. ↩
-
Loe tööstuslikest digitaalarvutitest, mida kasutatakse tootmisprotsesside juhtimiseks. ↩
-
Vaata kõrgsurve- ja kõrgtemperatuurilise pesukaitse ametlikku määratlust. ↩
