

Inleiding
U hebt geïnvesteerd in een geavanceerd servopneumatisch systeem in de verwachting dat u servo-elektrische prestaties zou krijgen tegen pneumatische prijzen, maar in plaats daarvan worstelt u met oscillaties, overschrijdingen en trage reacties waardoor uw besturingstechnicus zijn haren uit zijn hoofd wil trekken. 😫 Uw PID-lussen stabiliseren niet, uw positioneringsnauwkeurigheid is inconsistent en uw cyclustijden zijn langer dan verwacht. Het probleem ligt niet bij uw hardware of uw programmeervaardigheden, maar bij de samendrukbaarheid van lucht, de onzichtbare vijand die uw nauwkeurig afgestelde besturingsalgoritmen verandert in giswerk.
Luchtcompressibiliteit introduceert een niet-lineair, drukafhankelijk veereffect in servopneumatische regelkringen, wat fasevertraging veroorzaakt, de natuurlijke frequentie vermindert en positieafhankelijke dynamica creëert. Dit vereist gespecialiseerde modellerings- en compensatiestrategieën om een stabiele, hoogwaardige regeling te bereiken. In tegenstelling tot hydraulische of elektrische systemen met een starre mechanische koppeling, moet bij pneumatische systemen rekening worden gehouden met het feit dat lucht fungeert als een veer met variabele stijfheid tussen uw klep en uw belasting.
Ik heb tientallen servo-pneumatische systemen in drie continenten in gebruik genomen, en compressibiliteitsmodellering is waar de meeste ingenieurs over struikelen. Vorig kwartaal heb ik een robotica-integrator in Californië geholpen een project te redden dat drie maanden achterliep op schema omdat hun besturingsteam geen rekening had gehouden met pneumatische compressibiliteit bij het afstellen van de servo's.
Inhoudsopgave
- Wat is de samendrukbaarheidsfactor en waarom is deze zo belangrijk voor servopneumatische dynamica?
- Hoe modelleer je luchtcompressibiliteit wiskundig in besturingssystemen?
- Welke regelstrategieën compenseren voor compressibiliteitseffecten?
- Hoe kunnen Bepto-cilinders zonder stang de servopneumatische prestaties verbeteren?
Wat is de samendrukbaarheidsfactor en waarom is deze zo belangrijk voor servopneumatische dynamica?
De samendrukbaarheid van lucht is niet alleen een klein ongemak, maar verandert ook fundamenteel hoe uw regelsysteem zich gedraagt. 🌪️
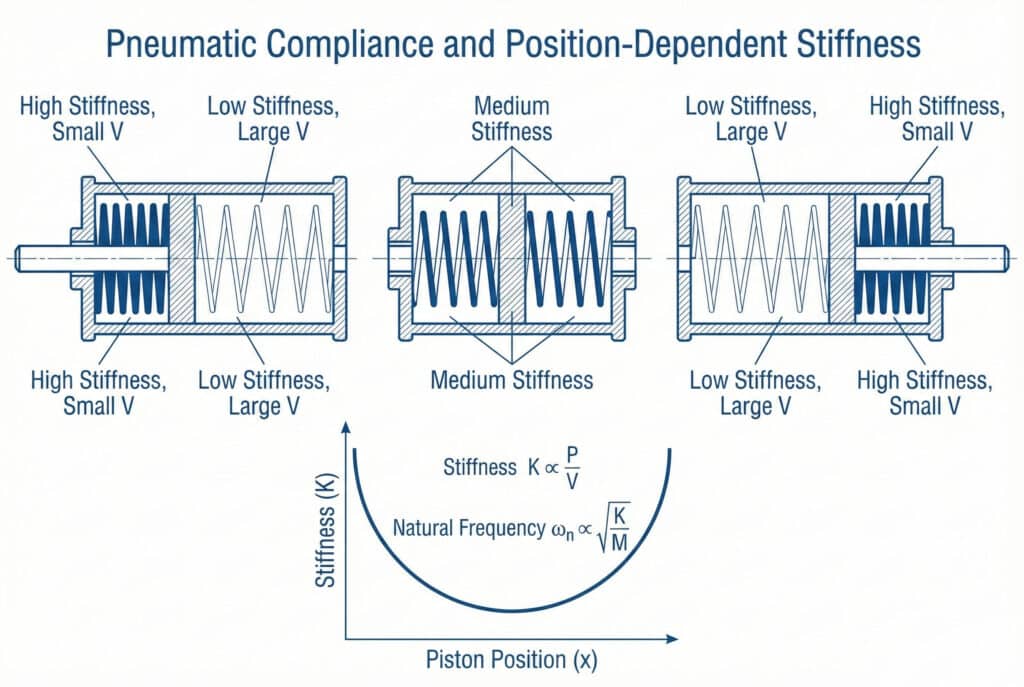
De samendrukbaarheidsfactor beschrijft hoe het luchtvolume verandert met de druk volgens de ideale gaswet1 (PV=nRT), waardoor een pneumatische veer ontstaat met een stijfheid die evenredig is aan de druk en omgekeerd evenredig aan het volume. Dit veereffect introduceert een resonantiefrequentie van doorgaans tussen 3 en 15 Hz, die de regelbandbreedte beperkt, overschrijding veroorzaakt en de systeemdynamiek sterk afhankelijk maakt van positie, belasting en toevoerdruk. Terwijl elektrische en hydraulische actuatoren zich gedragen als starre mechanische systemen, gedragen servopneumatische actuatoren zich als massa-veer-demper-systemen waarbij de veerstijfheid voortdurend verandert.
De fysica van pneumatische compliantie
Wanneer u een cilinderkamer onder druk zet, creëert u niet alleen kracht, maar comprimeert u ook luchtmoleculen tot een kleiner volume. Deze samengeperste lucht fungeert als een elastische veer die energie opslaat. De relatie wordt bepaald door:
$$
P × V = n × R × T
$$
Waar:
- P = absolute druk (Pa)
- V = volume (m³)
- n = aantal mol gas
- R = universele gasconstante (8,314 J/mol·K)
- T = absolute temperatuur (K)
Voor controledoeleinden is het voor ons van belang hoe de druk verandert bij een verandering in volume:
$$
\Delta P = -\left( \frac{\kappa \, P_{0}}{V_{0}} \right) \times \Delta V
$$
Waar κ de polytropische exponent2 (1,0 voor isotherme processen, 1,4 voor adiabatische processen).
Deze vergelijking onthult het cruciale inzicht: pneumatische stijfheid is evenredig met druk en omgekeerd evenredig met volume. Verdubbel de druk, verdubbel de stijfheid. Verdubbel het volume, halveer de stijfheid.
Waarom dit belangrijk is voor controle
In een servo-elektrisch systeem drijft de motor, wanneer u een beweging opdraagt, de belasting rechtstreeks aan via een stijve mechanische koppeling. De overdrachtsfunctie is relatief eenvoudig: in wezen een integrator met enige wrijving.
In een servopneumatisch systeem regelt de klep de druk, druk creëert kracht via het zuigeroppervlak, maar die kracht moet lucht comprimeren of expanderen voordat de last kan worden verplaatst. Je hebt:
Klep → Druk → Pneumatische veer → Belastingsbeweging
Die pneumatische veer introduceert een dynamiek van de tweede orde (resonantie) die het gedrag van het systeem domineert.
Positieafhankelijke dynamica
Hier wordt het lastig: naarmate je cilinder uitzet, neemt het volume aan de ene kant toe, terwijl het aan de andere kant afneemt. Dit betekent:
- Pneumatische stijfheid verandert met positie (hoger aan het einde van de slag, lager in het midden van de slag)
- De natuurlijke frequentie varieert tijdens de slag. (kan 2-3 keer veranderen)
- Optimale regelversterkingen zijn positieafhankelijk (voordelen op het ene gebied leiden tot instabiliteit op een ander gebied)
Typische kenmerken van pneumatische systemen
| Parameter | Servo-elektrisch | Servo-hydraulisch | Servo-pneumatisch |
|---|---|---|---|
| Koppelingsstijfheid | Oneindig (stijf) | Zeer hoog | Laag (variabel) |
| Natuurlijke frequentie | 50-200 Hz | 30-100 Hz | 3-15 Hz |
| Bandbreedte | 20-50 Hz | 10-30 Hz | 1-5 Hz |
| Positieafhankelijkheid | Geen | Minimaal | Ernstig |
| Dempingsverhouding | 0.1-0.3 | 0.3-0.7 | 0.1-0.4 |
| Niet-lineariteit | Laag | Medium | Hoog |
Gevolgen in de echte wereld
David, een besturingstechnicus bij een autofabriek in Ohio, zat met zijn handen in het haar vanwege een servopneumatisch pick-and-place-systeem. De positioneringsnauwkeurigheid varieerde van ±0,5 mm aan het einde van de slag tot ±3 mm halverwege de slag. Hij had wekenlang verschillende PID-versterkingen geprobeerd, maar kon geen instellingen vinden die over de volledige slag werkten.
Toen ik zijn systeem analyseerde, was het probleem duidelijk: hij behandelde de pneumatische actuator als een elektrische servo. Halverwege de slag zorgden de grote luchtvolumes voor een lage stijfheid en een natuurlijke frequentie van 4 Hz. Aan het einde van de slag zorgden de gecomprimeerde volumes voor een hoge stijfheid en een natuurlijke frequentie van 12 Hz – een verandering van 3x! Zijn PID-regelaar met vaste versterking kon die variatie onmogelijk aan.
We hebben geïmplementeerd winstplanning3 op basis van positie en toegevoegde feedforward-drukcompensatie. Zijn positioneringsnauwkeurigheid verbeterde tot ±0,8 mm over de volledige slag en zijn cyclustijd daalde met 20% omdat we agressievere gains konden gebruiken zonder instabiliteit. 🎯
Hoe modelleer je luchtcompressibiliteit wiskundig in besturingssystemen?
Je kunt niet controleren wat je niet kunt modelleren – en nauwkeurige modellering is de basis van effectieve servopneumatische regeling. 📐
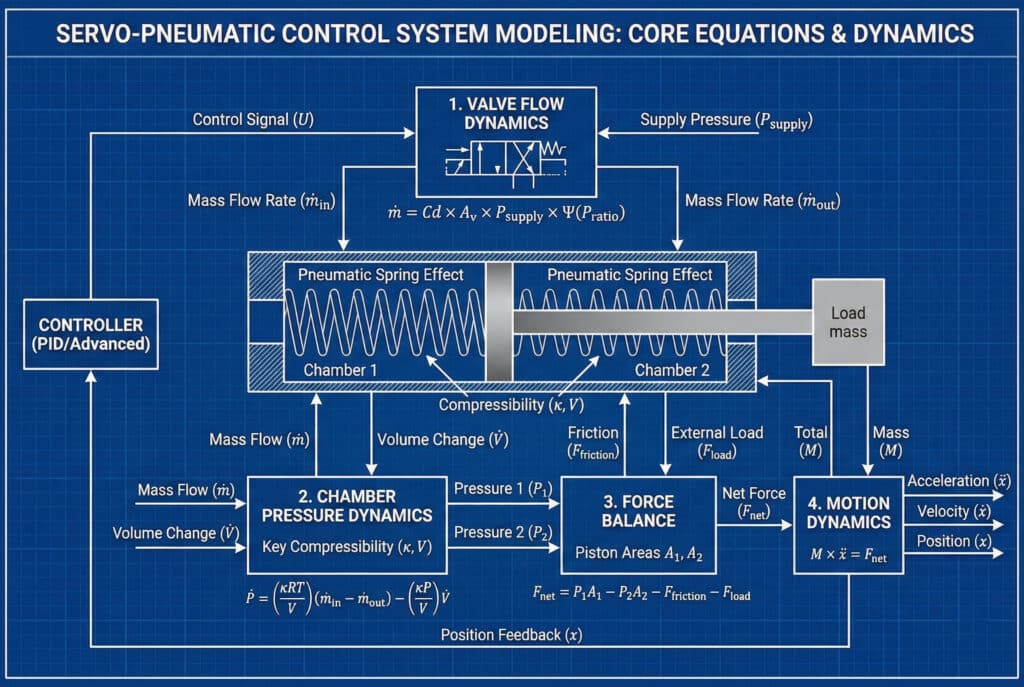
Het standaard servopneumatische model behandelt elke cilinderkamer als een drukvat met variabel volume, waarbij de massastroom in en uit wordt geregeld door klepdynamica, de omzetting van druk naar kracht via het zuigeroppervlak en de beweging van de belasting volgens de tweede wet van Newton. Dit resulteert in een vierde-orde niet-lineair differentiaalvergelijkingssysteem dat kan worden gelineariseerd rond werkpunten voor het ontwerp van de besturing. Dit model legt de essentiële compressibiliteitseffecten vast en blijft tegelijkertijd hanteerbaar voor realtime controle-implementatie.
De kernvergelijkingen
Een compleet servopneumatisch model bestaat uit vier gekoppelde subsystemen:
1. Stromingsdynamica van kleppen
De massastroom naar elke kamer is afhankelijk van de klepopening en het drukverschil:
$$
\dot{m}
= C_{d} \times A_{v} \times P_{supply} \times \Psi(P_{ratio})
$$
Waar:
- ṁ = massastroom (kg/s)
- Cd = afvoercoëfficiënt (normaal gesproken 0,6-0,8)
- A_v = klepopeningoppervlak (m²)
- Ψ = stromingsfunctie (afhankelijk van drukverhouding)
2. Dynamica van de kamerdruk
Drukveranderingen op basis van massastroom en volumeverandering:
Ṗ = (κ × R × T / V) × (ṁ_in – ṁ_out) – (κ × P / V) × V̇
Dit is de belangrijkste compressibiliteitsvergelijking. De eerste term vertegenwoordigt de drukverandering als gevolg van de massastroom. De tweede term vertegenwoordigt de drukverandering als gevolg van de volumeverandering (compressie/expansie).
3. Krachtbalans
Netto kracht op de zuiger/slede:
$$
F_{net}
= P_{1} \times A_{1}
– P_{2} \times A_{2}
– F_{wrijving}
– F_{belasting}
$$
Waar:
- P₁, P₂ = kamerdrukken
- A₁, A₂ = effectieve zuigeroppervlakken
- F_wrijving = wrijvingskracht (snelheidsafhankelijk)
- F_load = externe belastingskracht
4. Bewegingsdynamica
De tweede wet van Newton:
$$
M \,\ddot{x} = F_{net}
$$
Waarbij M de totale bewegende massa is en x de positie.
Linearisatie voor ontwerp van regelingen
Het bovenstaande niet-lineaire model is te complex voor klassiek ontwerp van regelingen. We lineariseren rond een werkpunt (evenwichtspositie en druk):
Overdrachtsfunctie4:
$$
\frac{X(s)}{U(s)}
= \frac{K}{\,s^{2} + 2 \zeta \omega_{n} s + \omega_{n}^{2}\,}
$$
Dit onthult de kritieke tweede-orde dynamica met:
$$
\omega_{n}
= \sqrt{\frac{\kappa \, P_{avg} \, A^{2}}{M \, V_{avg}}}
$$
— Eigenfrequentie
ζ = dempingsverhouding (afhankelijk van wrijving en klepdynamica)
Belangrijkste inzichten uit het model
Natuurlijke frequentieafhankelijkheid
De natuurlijke frequentievergelijking laat zien dat ω_n toeneemt met:
- Hogere druk (stijvere pneumatische veer)
- Groter zuigeroppervlak (meer kracht per drukverandering)
- Kleiner volume (stijvere veer)
- Lagere massa (gemakkelijker te versnellen)
Volumevariatie met positie
Voor een cilinder met slaglengte L en zuigeroppervlak A:
$$
V_{1}(x) = V_{dead} + A \times x
$$
$$
V_{2}(x) = V_{dead} + A \times (L – x)
$$
Waarbij V_dead het dode volume is (poorten, slangen, verdeelstukken).
Deze positieafhankelijkheid zorgt ervoor dat de natuurlijke frequentie aanzienlijk varieert tijdens de slag.
Praktische overwegingen bij het modelleren
| Complexiteit van het model | Nauwkeurigheid | Berekening | Gebruiksscenario |
|---|---|---|---|
| Eenvoudige 2e orde | ±30% | Zeer laag | Initieel ontwerp, eenvoudige PID |
| Lineair gemaakte 4e orde | ±15% | Laag | Klassiek ontwerp van besturingssystemen |
| Niet-lineaire simulatie | ±5% | Medium | Winstplanning, feedforward |
| CFD-gebaseerd model | ±2% | Zeer hoog | Onderzoek, extreme precisie |
Parameteridentificatie
Om deze modellen te gebruiken, hebt u de werkelijke systeemparameters nodig:
Gemeten parameters:
- Cilinderboring en slag (uit gegevensblad)
- Bewegende massa (wegen)
- Toevoerdruk (manometer)
- Dode volumes (meet slangen en poorten)
Geïdentificeerde parameters:
- Wrijvingscoëfficiënten (stapresponsietests)
- Klepstroomcoëfficiënten (drukvervaltest)
- Effectieve bulkmodulus (frequentieresponsietest)
Bepto's ondersteuning bij modellering
Bij Bepto verstrekken we gedetailleerde pneumatische parameters voor al onze stangloze cilinders:
- Nauwkeurige boring- en slaglengteafmetingen
- Gemeten dode volumes voor elke poortconfiguratie
- Effectieve zuigeroppervlakken rekening houdend met afdichtingswrijving
- Aanbevolen modelleringsparameters op basis van fabriekstests
Deze gegevens besparen u weken aan systeemidentificatiewerk en zorgen ervoor dat uw modellen overeenkomen met de werkelijkheid. 📊
Welke regelstrategieën compenseren voor compressibiliteitseffecten?
Standaard PID-regeling is niet voldoende: servopneumatica vereist gespecialiseerde regelstrategieën die rekening houden met samendrukbaarheid. 🎮
Effectieve servopneumatische regeling vereist een combinatie van meerdere strategieën: gain scheduling, waarbij de parameters van de regelaar worden aangepast op basis van positie en druk om variërende dynamiek op te vangen, feedforward-compensatie, waarbij de vereiste druk wordt voorspeld op basis van de gewenste versnelling om de volgfout te verminderen, en drukfeedback, waarbij een interne lus rond de kamerdruk wordt gesloten om de effectieve stijfheid te vergroten. Samen zorgen deze strategieën voor een verbetering van de bandbreedte met een factor 2-3 ten opzichte van eenvoudige PID-regeling. De sleutel is om samendrukbaarheid te behandelen als een bekend, compenseerbaar effect in plaats van als een onbekende verstoring.
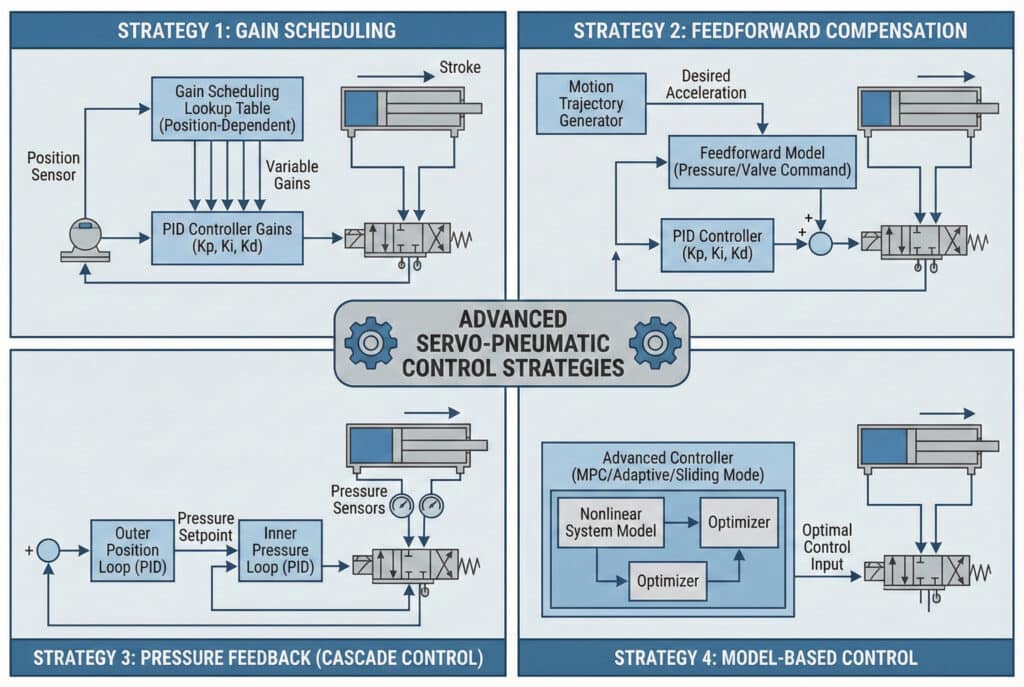
Strategie 1: Winstplanning
Aangezien de systeemdynamica verandert met de positie, gebruik je positieafhankelijke regelversterkingen:
$$
K_{p}(x)
= K_{p0} \times \sqrt{\frac{V_{avg}}{V(x)}}
$$
Dit compenseert voor variaties in stijfheid door de versterking te verhogen waar de stijfheid laag is (midden van de slag) en te verlagen waar de stijfheid hoog is (einde van de slag).
Implementatie
- Verdeel de slag in 5-10 zones
- Stel de PID-versterkingen voor elke zone af
- Interpoleer winsten op basis van huidige positie
- Update wint elke regelcyclus (doorgaans 1-5 ms)
Voordelen
- Consistente prestaties over de volledige slag
- Kan agressievere winsten gebruiken zonder instabiliteit
- Kan beter omgaan met belastingsvariaties
Uitdagingen
- Vereist nauwkeurige positieterugkoppeling
- In het begin complexer om af te stemmen
- Potentieel voor overschakeling van winsttransiënten
Strategie 2: Feedforward-compensatie
Voorspel de vereiste klepcommando's op basis van de gewenste beweging:
$$
u_{ff}
= \frac{M \,\ddot{x}{gewenst} + F{wrijving} + F_{belasting}}
{\Delta P \times A}
$$
Voeg vervolgens drukvoorspelling toe:
$$
\Delta P_{vereist}
= \frac{M \,\ddot{x}_{gewenst}}{A}
$$
Dit anticipeert op de drukveranderingen die nodig zijn om de gewenste versnelling te bereiken, waardoor de trackingfout drastisch wordt verminderd.
Implementatie
- Differentieer de positieopdracht tweemaal om de gewenste versnelling te verkrijgen.
- Bereken het vereiste drukverschil
- Omzetten naar klepcommando met behulp van klepstroommodel
- Toevoegen aan feedbackcontrolleruitgang
Voordelen
- Vermindert tracking error met 60-80%
- Maakt snellere bewegingen mogelijk zonder overschrijding
- Verbetert de herhaalbaarheid
Strategie 3: Drukfeedback (cascaderegeling)
Implementeer een besturingsstructuur met twee lussen:
Buitenste lus: Positiecontroller genereert gewenst drukverschil
Binnenste lus: Snelle drukregelaar geeft klep opdracht om gewenste drukken te bereiken
Dit verhoogt effectief de stijfheid van het systeem door de pneumatische veer actief te regelen.
Implementatie
Buitenste lus (positie):
error_pos = x_gewenst – x_werkelijk
ΔP_gewenst = PID_positie(fout_pos)
Binnenste lus (druk):
fout_P1 = P1_gewenst – P1_werkelijk
fout_P2 = gewenste_P2 – werkelijke_P2
u_valve = PID_druk(fout_P1, fout_P2)
Voordelen
- Verhoogt de effectieve bandbreedte met 2-3x
- Betere storingsonderdrukking
- Consistentere prestaties
Vereisten
- Snelle, nauwkeurige druksensoren in elke kamer
- Snelle regelkring (>500 Hz)
- Kwaliteitsproportionele kleppen
Strategie 4: Modelgebaseerde besturing
Gebruik het volledige niet-lineaire model voor geavanceerde besturing:
Schuifmodusregeling: Robuust ten opzichte van parametervariaties en storingen
Modelvoorspellende regeling (MPC)5: Optimaliseert de controle over de toekomstige tijdshorizon
Adaptieve regeling: Past modelparameters automatisch online aan
Deze geavanceerde strategieën kunnen bijna servo-elektrische prestaties leveren, maar vereisen aanzienlijke technische inspanningen.
Vergelijking van controlestrategieën
| Strategie | Prestatiewinst | Complexiteit van implementatie | Hardwarevereisten |
|---|---|---|---|
| Basis-PID | Basislijn | Laag | Alleen positiesensor |
| Winstplanning | +30-50% | Medium | Positiesensor |
| Feedforward | +60-80% | Medium | Positiesensor |
| Drukfeedback | +100-150% | Hoog | Positie + 2 druksensoren |
| Modelgebaseerd | +150-200% | Zeer hoog | Meerdere sensoren + snelle processor |
Praktische richtlijnen voor afstemming
Voor een PID met vooraf ingestelde versterking en feedforward (de ideale situatie voor de meeste toepassingen):
- Begin met afstemmen halverwege de slag: Stel de PID-versterkingen af op 50%-slag waarbij de dynamiek “gemiddeld” is.”
- Feedforward toevoegen: Implementeer versnellingsfeedforward met conservatieve versterking (begin bij 50% van de berekende waarde)
- Implementatie van gain scheduling: Schaalverhoudingen en afgeleide winsten op basis van positie
- Iterate: Fijnafstemming in elke zone, met de nadruk op overgangsgebieden
- Test onder verschillende omstandighedenControleer de prestaties bij verschillende belastingen en snelheden.
Een succesverhaal
Maria runt een bedrijf in Texas dat zich bezighoudt met maatwerkautomatisering en dat hogesnelheidsverpakkingsmachines bouwt. Ze had moeite met een servopneumatisch systeem dat verpakkingen met een snelheid van 2 m/s binnen ±1 mm moest positioneren. Met standaard PID-regeling bereikte ze een nauwkeurigheid van ±4 mm met veel oscillatie.
We hebben een drieledige strategie geïmplementeerd:
- Versterkingsregeling op basis van positie (5 zones)
- Versnellingsfeedforward (70% van berekende waarde)
- Geoptimaliseerde Bepto-cilinders zonder stang met lage wrijving om onzekerheid door wrijving te minimaliseren
De resultaten waren dramatisch:
- De positioneringsnauwkeurigheid is verbeterd van ±4 mm naar ±0,8 mm.
- Inwerktijd verkort met 40%
- De cyclustijd is met 251 TP3T afgenomen.
- Het systeem werd stabiel over het volledige belastingsbereik (0-50 kg).
De volledige implementatie kostte twee dagen aan engineeringtijd, en dankzij de prestatieverbetering kon ze drie nieuwe contracten binnenhalen die strengere toleranties vereisten. 💪
Hoe kunnen Bepto-cilinders zonder stang de servopneumatische prestaties verbeteren?
De cilinder zelf is een cruciaal onderdeel in servopneumatische prestaties, en niet alle cilinders zijn gelijk. ⚙️
Bepto-cilinders zonder stang verbeteren de servopneumatische besturing door middel van vier belangrijke kenmerken: een geminimaliseerd dood volume dat de pneumatische stijfheid en natuurlijke frequentie met 30-40% verhoogt, wrijvingsarme afdichtingen die wrijvingsonzekerheid verminderen en de nauwkeurigheid van het model verbeteren, een symmetrisch ontwerp dat de dynamiek in beide richtingen gelijk maakt, en een nauwkeurige productie die zorgt voor consistente parameters over de hele slag – en dat alles tegen een prijs die 30% lager ligt dan die van OEM-alternatieven en met een levertijd van enkele dagen in plaats van weken. Wanneer je te maken hebt met compressie-effecten, is elk ontwerpdetail van belang.

Ontwerpkenmerk 1: Geoptimaliseerd dood volume
Dood volume is de vijand van servopneumatische prestaties. Het is het luchtvolume in poorten, verdeelstukken en slangen dat niet bijdraagt aan kracht, maar wel aan compliantie (veerkracht).
Bepto-voordeel:
- Geïntegreerd poortontwerp minimaliseert interne doorgangen
- Compacte manifoldopties verminderen het externe volume
- Geoptimaliseerde poortgrootte zorgt voor een evenwicht tussen doorstroming en volume
Impact:
- 30-40% minder dood volume dan typische stangloze cilinders
- Natuurlijke frequentie verhoogd met 20-30%
- Snellere respons en hogere bandbreedte
Volumevergelijking
| Configuratie | Dood volume per kamer | Natuurlijke frequentie (typisch) |
|---|---|---|
| Standaard zonder stang + standaard poorten | 150-200 cm³ | 5-7 Hz |
| Standaard zonder stang + geoptimaliseerde poorten | 100-150 cm³ | 7-9 Hz |
| Bepto Rodless + geïntegreerde poorten | 60-100 cm³ | 9-12 Hz |
Ontwerpkenmerk 2: Afdichtingen met lage wrijving
Wrijving is de grootste bron van modelonzekerheid in servopneumatica. Hoge of inconsistente wrijving maakt feedforwardcompensatie ineffectief en vereist hoge feedbackversterkingen (die de stabiliteitsmarges verminderen).
Bepto-voordeel:
- Geavanceerde polyurethaanafdichtingen met wrijvingsmodificatoren
- 40% lagere afscheurweerstand dan standaard afdichtingen
- Meer consistente wrijving bij verschillende temperaturen en snelheden
- Langere levensduur (meer dan 10 miljoen cycli) behoudt prestaties
Impact:
- Nauwkeurigere krachtvoorspelling (±5% versus ±15%)
- Betere feedforward-prestaties
- Lagere vereiste feedbackversterking
- Verminderd stick-slip-gedrag
Ontwerpkenmerk 3: Symmetrisch ontwerp
Veel staafloze cilinders hebben een asymmetrische interne geometrie, waardoor er in elke richting een andere dynamiek ontstaat. Dit verdubbelt uw inspanningen om de besturing af te stellen.
Bepto-voordeel:
- Symmetrische plaatsing en dimensionering van poorten
- Evenwichtige afdichtingswrijving in beide richtingen
- Gelijke effectieve oppervlakken (geen verschil in staafoppervlak)
Impact:
- Eén set regelversterkingen werkt voor beide richtingen
- Vereenvoudigde winstplanning
- Meer voorspelbaar gedrag
Ontwerpkenmerk 4: Precisieproductie
Servopneumatische besturing is afhankelijk van nauwkeurige modellen. Productievariaties zorgen voor een mismatch tussen modellen, wat de prestaties verslechtert.
Bepto-voordeel:
- Boortolerantie: H7 (±0,015 mm voor een boring van 50 mm)
- Rechtheid van de geleiderail: 0,02 mm/m
- Consistente afdichtingscompressie tijdens de productie
- Bijpassende lagersets
Impact:
- Modellen komen overeen met de werkelijkheid binnen 5-10%
- Consistente prestaties van unit tot unit
- Kortere inbedrijfstellingstijd
Voordelen op systeemniveau
Wanneer u deze functies combineert in een compleet servopneumatisch systeem:
| Prestatiemeting | Standaard cilinder | Bepto cilinder zonder stang | Verbetering |
|---|---|---|---|
| Natuurlijke frequentie | 6 Hz | 10 Hz | +67% |
| Bereikbare bandbreedte | 2 Hz | 4 Hz | +100% |
| Nauwkeurigheid positionering | ±2mm | ±0,8 mm | +60% |
| Inwerktijd | 400 ms | 200 ms | -50% |
| Modelnauwkeurigheid | ±15% | ±5% | +67% |
| Wrijvingsvariatie | ±20% | ±8% | +60% |
Ondersteuning voor applicatietechniek
Wanneer u Bepto kiest voor servopneumatische toepassingen, krijgt u meer dan alleen een cilinder:
✅ Gedetailleerde pneumatische parameters voor nauwkeurige modellering
✅ Gratis advies over controlestrategieën (dat zijn ik en mijn team! 👋)
✅ Aanbevolen klepafmetingen voor optimale prestaties
✅ Voorbeeld van controlecode voor gangbare PLC's
✅ Toepassingsspecifiek testen om de prestaties te controleren voordat u zich vastlegt
Kosten-prestatieanalyse
Laten we de totale systeemkosten en prestaties vergelijken:
Optie A: Premium OEM-cilinder + standaardregeling
- Kosten cilinder: $2.500
- Regeltechniek: 40 uur @ $100/uur = $4.000
- Prestaties: ±2 mm, 2 Hz bandbreedte
- Totaal: $6.500
Optie B: Bepto-cilinder + geoptimaliseerde regeling
- Kosten cilinder: $1.750 (30% minder)
- Regeltechniek: 24 uur @ $100/uur = $2.400 (minder afstemming nodig)
- Prestaties: ±0,8 mm, 4 Hz bandbreedte
- Totaal: $4.150
Besparingen: $2.350 (36%) met betere prestaties 💰
Waarom servopneumatische integrators voor Bepto kiezen
We begrijpen dat servopneumatische besturing een uitdaging is. De samendrukbaarheid van lucht is een fundamenteel natuurkundig probleem dat niet kan worden geëlimineerd, maar wel kan worden geminimaliseerd en gecompenseerd. Onze stangloze cilinders zijn speciaal ontworpen om de effecten van samendrukbaarheid die besturing bemoeilijken te verminderen:
- Hogere stijfheid door verminderd dood volume
- Meer voorspelbare wrijving door middel van geavanceerde afdichtingen
- Betere modelnauwkeurigheid door middel van precisieproductie
- Snellere levering (3-5 dagen) zodat u snel kunt itereren
- Lagere kosten zodat u betere kleppen en sensoren kunt aanschaffen
Wanneer u een servopneumatisch systeem bouwt, vormt de cilinder uw basis. Bouw op een solide basis en al het andere wordt eenvoudiger. 🎯
Conclusie
Door luchtcompressibiliteit te beheersen met behulp van nauwkeurige modellering en geavanceerde regelstrategieën, in combinatie met een geoptimaliseerd cilinderontwerp, verandert servopneumatica van een frustrerend compromis in een kosteneffectieve, hoogwaardige oplossing die voor veel toepassingen kan concurreren met servo-elektrische systemen. 🚀
Veelgestelde vragen over compressibiliteit in servopneumatische besturing
Waarom kan ik niet gewoon een hogere druk gebruiken om compressibiliteitseffecten te elimineren?
Een hogere druk verhoogt de pneumatische stijfheid en de natuurlijke frequentie, waardoor de prestaties met 20-30% worden verbeterd, maar het kan de samendrukbaarheid niet elimineren omdat de verhouding tussen druk en volume niet-lineair blijft en een hogere druk ook de wrijvingskrachten en slijtage van de afdichting verhoogt. Zie het als het aanspannen van een veer: deze wordt stijver, maar het blijft een veer en geen starre verbinding. Bovendien zijn de meeste industriële pneumatische systemen beperkt tot een toevoerdruk van 6-8 bar vanwege infrastructuur- en veiligheidsoverwegingen. De betere aanpak is om het volume te minimaliseren en geavanceerde regelstrategieën te gebruiken in plaats van simpelweg de druk te verhogen.
Hoe verhoudt de prestatie van servopneumatische systemen zich tot die van servo-elektrische systemen voor positioneringstoepassingen?
Servopneumatiek bereikt doorgaans een regelbandbreedte van 1-5 Hz en een positioneringsnauwkeurigheid van ±0,5-2 mm, terwijl servo-elektronica een bandbreedte van 10-30 Hz en een nauwkeurigheid van ±0,01-0,1 mm bereikt. Servopneumatiek kost echter 40-60% minder, biedt inherente compliance voor veilige interactie met mensen en biedt eenvoudigere overbelastingsbeveiliging. Voor toepassingen die een nauwkeurigheid van minder dan een millimeter of een hoge bandbreedte vereisen, is servo-elektrisch superieur. Voor toepassingen waar een nauwkeurigheid van ±1 mm en een gemiddelde snelheid voldoende zijn, biedt geoptimaliseerde servo-pneumatica een uitstekende prijs-kwaliteitverhouding. Het belangrijkste is dat de technologie wordt afgestemd op uw werkelijke behoeften, zonder te overdrijven. 🎯
Kan ik bestaande pneumatische cilinders achteraf voorzien van servobesturing?
U kunt servobesturing toevoegen aan bestaande cilinders, maar de prestaties worden beperkt door het dode volume, de wrijvingseigenschappen en de fabricagetoleranties van de cilinder. Meestal wordt slechts 50-70% van de prestaties bereikt die mogelijk zijn met cilinders die zijn ontworpen voor servotoepassingen. Als u een retrofit uitvoert, concentreer u dan op het minimaliseren van het externe dode volume (korte slangen, compacte verdeelstukken), het implementeren van gain scheduling om positieafhankelijke dynamica te verwerken en het gebruik van drukfeedback indien mogelijk. Als u echter een nieuw systeem ontwerpt, kunt u door vanaf het begin servo-geoptimaliseerde cilinders zoals de stangloze serie van Bepto te specificeren, aanzienlijk veel engineeringtijd besparen en betere resultaten behalen.
Welke bemonsteringsfrequentie heb ik nodig voor een effectieve servopneumatische regeling?
Voor basispositiecontrole is een bemonsteringsfrequentie van 100-200 Hz vereist, terwijl geavanceerde strategieën met drukfeedback 500-1000 Hz vereisen om de snelle pneumatische dynamica effectief te regelen en optimale prestaties te bereiken. De buitenste positielus kan langzamer werken (100-200 Hz), maar als u drukfeedback (cascaderegeling) implementeert, moet de binnenste druklus minimaal op 500 Hz werken om de pneumatische resonantie te regelen. De meeste moderne PLC's en motion controllers kunnen deze snelheden gemakkelijk halen. Probeer geen servopneumatische regeling te implementeren op een PLC-scan van 50 Hz, want dan krijgt u voortdurend te maken met stabiliteitsproblemen.
Waarom zou ik Bepto-cilinders zonder stang kiezen voor mijn servopneumatische toepassing?
Bepto-cilinders zonder stang leveren een 30-40% hogere natuurlijke frequentie door een geminimaliseerd dood volume, 40% lagere wrijving voor een betere modelnauwkeurigheid en precisieproductie voor consistente prestaties — en dat alles tegen 30% lagere kosten dan OEM-alternatieven, met een levertijd van 3-5 dagen en gratis ondersteuning bij de toepassing. Wanneer u servopneumatische besturing implementeert, heeft het ontwerp van de cilinder direct invloed op de haalbare prestaties en de benodigde technische inspanningen. Onze cilinders zijn speciaal geoptimaliseerd voor servotoepassingen, met gedetailleerde pneumatische parameters voor nauwkeurige modellering. Bovendien biedt ons technische team (waaronder ikzelf! 👋) gratis advies over besturingsstrategieën, klepafmetingen en systeemoptimalisatie. We hebben tientallen integrators geholpen om hun prestatiedoelen sneller en tegen lagere kosten te bereiken. Laat ons u ook helpen! 💪
-
Bekijk de fundamentele thermodynamische vergelijking die de relatie tussen druk, volume en temperatuur in gassen beschrijft. ↩
-
Begrijp de thermodynamische index die de warmteoverdracht tijdens compressie- en expansieprocessen beschrijft. ↩
-
Ontdek deze lineaire parameter-variabele regeltechniek die wordt gebruikt om systemen met veranderende dynamiek te beheren. ↩
-
Leer hoe wiskundige functies de relatie tussen input en output in lineaire tijdinvariante systemen weergeven. ↩
-
Ontdek geavanceerde regelmethoden die gebruikmaken van dynamische procesmodellen om toekomstige regelacties te optimaliseren. ↩
