

簡介
您的高速自動化生產線是否經常錯失目標位置,浪費寶貴的週期時間?🎯當氣動滑軌超出預定位置或耗時過久才能穩定定位時,生產產能將受損、定位精度下降,機械磨損更會加速。這些動態性能問題,每日困擾著無數製造作業。.
氣動滑軌的超調現象發生於滑台在停穩前超越目標位置,而停穩時間則衡量系統達到並維持穩定定位所需的時間,且需在可接受公差範圍內。典型高速 無桿氣缸1 系統會出現5-15毫米的超調現象及50-200毫秒的穩定時間,但透過適當緩衝、壓力優化及控制策略,可將這些數值降低60-80%。.
就在上個季度,我與德州奧斯汀某半導體封裝廠的高階自動化工程師馬庫斯合作。他的拾放系統在每次800毫米行程結束時出現12毫米超調現象,導致定位誤差使每件零件的週期時間延遲0.3秒。 經分析其Bepto無桿氣缸配置並優化緩衝參數後,超調幅度降至3毫米,沉降時間縮短65%。以下分享達成此成效的分析方法。📊
目錄
氣動滑軌中產生超調與延長穩定時間的原因為何?
理解動態效能問題的根本原因,是邁向優化的第一步。🔍
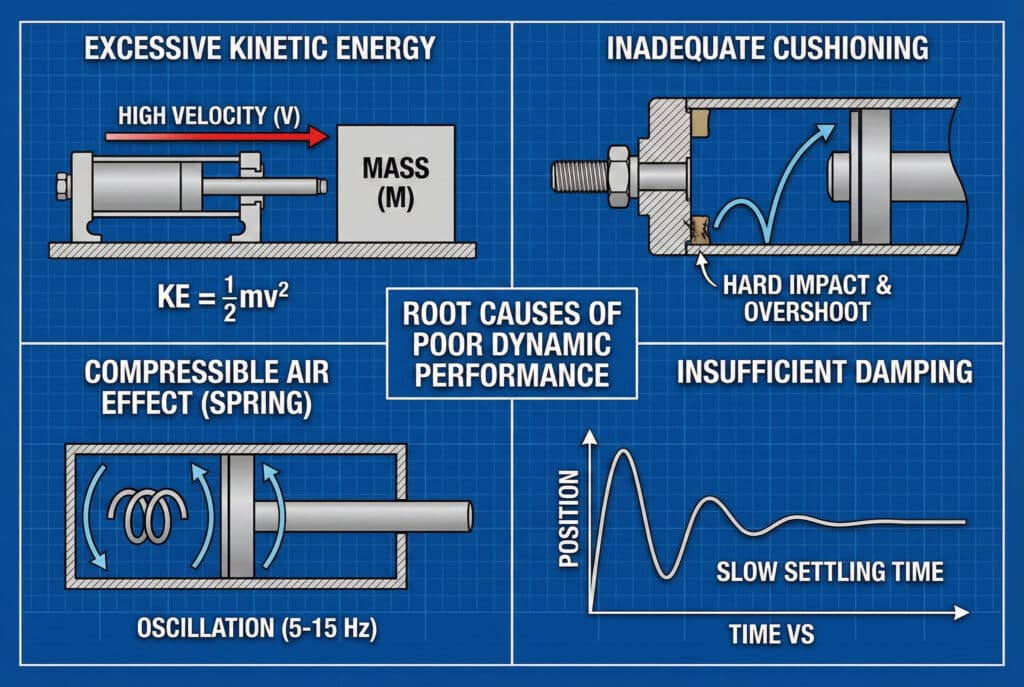
超調與不良的穩定時間主要源於四項因素:行程末端過高的動能超越緩衝能力、氣動緩衝裝置或機械式避震器效能不足、可壓縮空氣作為彈簧導致振盪現象,以及緩衝材料密度過低。 阻尼2 在系統中快速消散能量。移動質量、速度與減速距離之間的相互作用決定了最終性能表現。.
氣動減速的物理原理
當高速氣動滑塊接近終端位置時,必須吸收並消散動能。能量方程式告訴我們:
$$
動能
= \frac{1}{2} \times 質量 \times 速度^{2}
$$
此能量必須在可用的減速距離內吸收。問題發生於:
- 速度過高能量隨速度的平方增加
- 質量過大更重的物體具有更大的動量
- 緩衝效果不足吸收能力不足
- 阻尼效果不佳能量轉化為振盪而非熱能
常見系統缺陷
| 問題 | 症狀 | 典型原因 |
|---|---|---|
| 強勁衝擊 | 巨響,無超調 | 未啟動緩衝功能 |
| 過度超調 | 超過目標10毫米 | 緩衝過軟或磨損 |
| 擺動 | 多次彈跳 | 阻尼不足 |
| 緩慢沉降 | 200毫秒穩定化 | 過度阻尼或低壓 |
在Bepto,我們分析了數百個高速無桿氣缸應用案例。最常見的問題是什麼?工程師們僅依據型錄建議選擇緩衝裝置,卻未考量其特定的速度與負載條件。.
空氣可壓性效應
與液壓系統不同,氣動系統必須應對空氣的可壓縮性。當緩衝裝置啟動時,壓縮空氣會發揮彈簧作用,儲存可能引發反彈的能量。壓力與體積的關係會產生自然振盪頻率,在無桿氣缸系統中通常介於5至15赫茲之間。.
如何衡量與量化動態績效指標?
精準測量對於系統性改進與驗證至關重要。📏
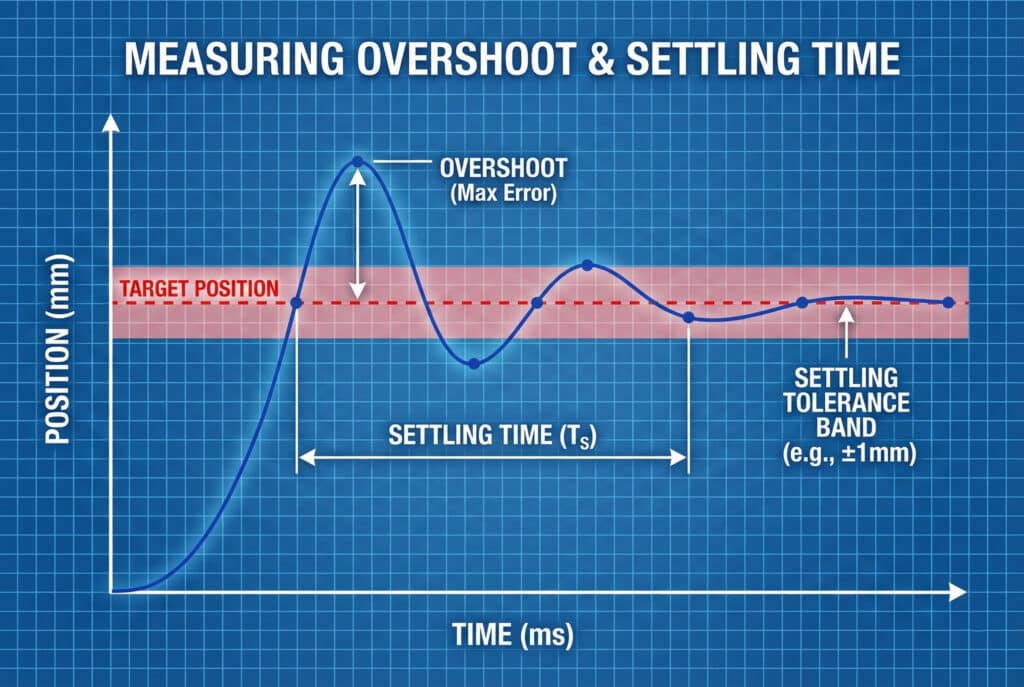
要準確測量超調量與穩定時間,您需要:高解析度位置感測器(最低0.1毫米解析度)、1千赫茲或更高取樣率的數據擷取、明確界定的穩定公差(通常為±0.5毫米至±2毫米),以及在一致條件下進行多次測試運行。超調量定義為超出目標位置的最大誤差值,而穩定時間則指系統進入並持續維持在公差範圍內的時長。.
測量設備與設置
基本儀器
主要績效指標
超調 (OS)最大超出目標位置
- 公式:OS = (峰值位置 – 目標位置)
- 可接受範圍:2-5毫米(適用於大多數工業應用)
- 關鍵應用:<1毫米
沉降時間 (Ts)達到並維持在公差範圍內的時間
- 從減速開始到最終穩定位置的測量時間
- 行業標準:行程長度誤差範圍為±2%
- 高性能目標:500毫米行程內<100毫秒
峰值減速:停止過程中的最大負加速度
- 以重力加速度計量(1g = 9.81 m/s²)
- 典型範圍:工業設備適用於2-5克
- 過高數值(>8克)顯示可能存在機械性損傷
測試協議最佳實踐
珍妮佛任職於麻薩諸塞州波士頓某醫療設備製造商,擔任品質工程師。她苦於組裝線上的定位精度不穩定。當我們協助她實施結構化測量方案——以三種速度各執行50次測試循環並進行統計分析——發現全天溫度波動導致緩衝性能出現40%的差異。憑藉這些數據,我們指定採用溫度補償式緩衝系統,成功維持性能穩定性。🌡️
哪些工程解決方案能減少超調並縮短沉降時間?
現有多種經實證的策略,可系統性地優化動態效能。⚙️
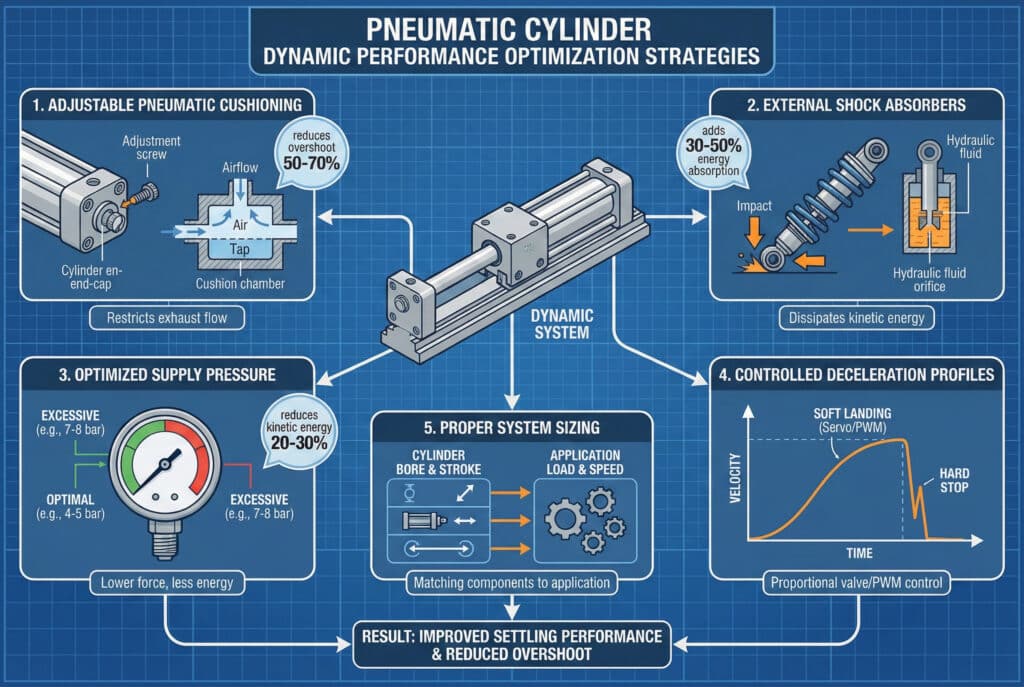
五種主要解決方案可提升沉降性能:可調式氣動緩衝(最有效,可降低50-70%超調量)、外部減震器(增加30-50%能量吸收)、優化供氣壓力(減少20-30%動能)、透過伺服閥控制減速曲線,以及 PWM 控制4 (實現軟著陸),以及正確的系統尺寸配置(將氣缸直徑與衝程匹配至應用需求)。結合多種方法可獲得最佳效果。.
氣動緩衝優化
現代無桿氣缸配備可調式緩衝裝置,能在行程最後10-30毫米時限制排氣流量。正確調整至關重要:
緩衝調節程序
- 開始時完全關閉最大限制
- 執行測試循環觀察超調與穩定過程
- 旋開四分之一圈: 稍微減少限制
- 重複測試:尋求最佳平衡
- 文件設定從關閉位置記錄轉向
目標最小超調量(2-3毫米)搭配最快穩定時間(<100毫秒)
外部避震器選型
當內建緩衝系統不足時,外部避震器可提供額外的能量吸收能力:
| 避震器類型 | 能源容量 | 調整 | 成本 | 最佳應用 |
|---|---|---|---|---|
| 自動調節 | 中型 | 自動 | 高 | 可變負載 |
| 可調式孔口 | 中-高 | 手冊 | 中型 | 固定負載 |
| 重型工業 | 非常高 | 手冊 | 非常高 | 極端條件 |
| 彈性體緩衝器 | 低 | 無 | 低 | 輕型備用 |
進階控制策略
對於需要卓越性能的應用,請考慮:
我們的Bepto工程團隊協助客戶採用相容的無桿氣缸替換方案,通常能以低30-40%的成本實現媲美或超越原廠規格的性能表現。.
載荷質量與速度如何影響系統動力學?
質量、速度與動態性能之間的關係遵循可預測的工程原理。📐
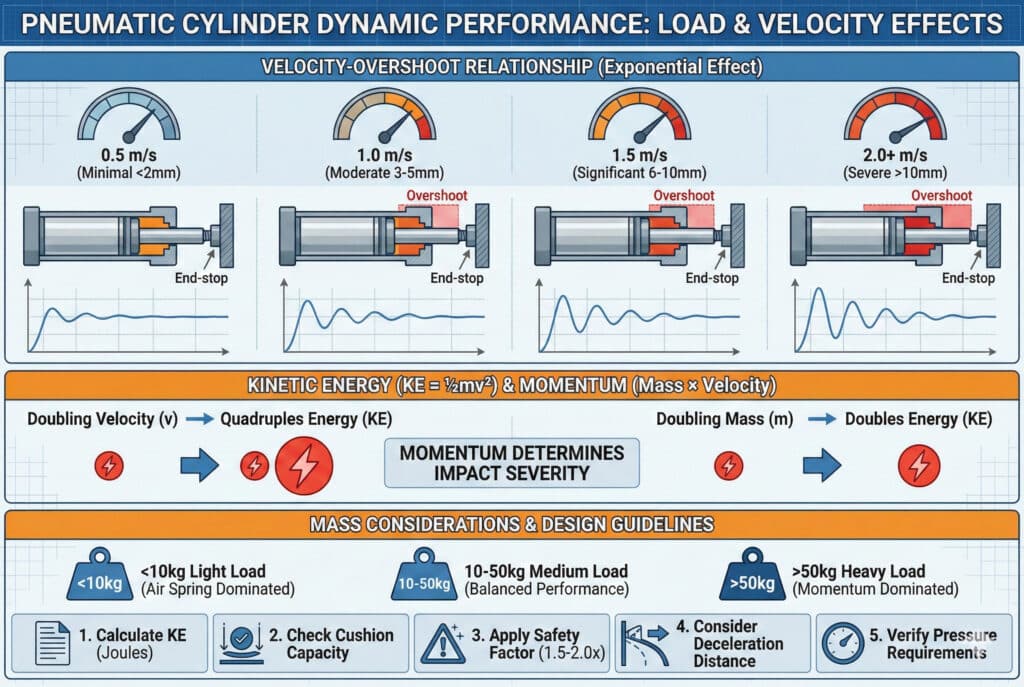
載荷質量與速度對超調量及穩定時間具有指數級影響:速度倍增將使動能增加四倍,需四倍緩衝能力;而質量倍增則使能量呈線性倍增。關鍵參數為動量(質量×速度),其決定衝擊嚴重程度。當系統運行速度超過2 m/s且載荷逾50公斤時,須經精密工程設計方能達成可接受的穩定性能。.
速度-超調關係
來自數千個安裝點的測試數據顯示:
- 0.5 米/秒最小超調量(<2毫米),卓越的穩定性
- 1.0 m/s適度超調(3-5毫米),具備良好緩衝效果的穩定性
- 1.5 m/s顯著超調(6-10毫米),需進行優化
- 2.0+ 米/秒嚴重超調(>10毫米),需採用先進解決方案
大規模考量
輕量負載(<10公斤)空氣彈簧效應主導,可能出現擺動現象
中等負載(10-50公斤)均衡的性能表現,標準緩衝效果足夠
重物(>50公斤)動量主導一切,外部減震器往往不可或缺
實用設計指南
在為高速應用指定氣動滑軌時:
- 計算動能KE = ½mv²(單位:焦耳)
- 檢查緩衝能力製造商規格(單位:焦耳)
- 套用安全係數1.5-2.0倍以確保可靠性
- 考慮減速距離較長的緩衝墊 = 更溫和的停止
- 驗證壓力要求更高壓力可提升緩衝效果
在Bepto,我們為所有無桿氣缸型號提供詳盡的技術規格,包含不同壓力與速度下的緩衝能力曲線。這些數據能協助工程師做出明智決策,而非憑空揣測零件選型。💪
總結
透過系統化分析與優化高速氣動滑軌的超調與穩定時間,可顯著縮短循環週期、提升定位精度並延長設備壽命——藉由工程基礎原理與實證解決方案,將合格性能轉化為競爭優勢。🚀
氣動滑塊動態性能常見問答
問:工業用氣動滑軌的可接受超調值是多少?
對於大多數工業應用而言,2-5毫米的超調範圍尚可接受,且代表著調校良好的緩衝效果。精密應用如電子組裝或醫療設備製造可能需要小於1毫米的超調,而較不關鍵的物料搬運則可容忍5-10毫米的超調。關鍵在於一致性——可重複的超調可在程式設計中進行補償,但隨機變異則會引發品質問題。.
問: 我如何知道我的緩衝是否調整妥當?
正確調整的緩衝裝置會產生柔和的「呼嘯」聲響,而非沉重的金屬撞擊聲;行程末端可見的彈跳幅度極小,且在多次循環中能維持±2毫米內的穩定停止位置。若聽見劇烈撞擊聲、觀察到過度彈跳現象,或定位誤差超過5毫米,則需調整緩衝裝置或為系統加裝外部避震器。.
問:我能否透過增加氣壓來縮短沉降時間?
是的,但會面臨收益遞減與潛在弊端。將壓力從6巴提升至8巴,通常能透過增強緩衝效能與系統剛性,使沉降時間縮短15-25%。然而,超過8巴的壓力鮮少帶來額外效益,反而會增加空氣消耗量、磨損速率及噪音水平。在提升壓力前,應先優化緩衝調整設定。.
問:為何我的氣動滑塊在高溫與低溫環境下表現不同?
溫度會影響空氣密度、密封摩擦及潤滑劑黏度——這些因素皆會影響動態性能。低溫系統(低於15°C)會出現摩擦力增加與反應遲緩現象,而高溫系統(高於40°C)則因空氣密度降低導致緩衝效果減弱。 溫度波動達20°C時,穩定時間可能延長30-40%(TP3T)。關鍵應用場合應考慮採用溫度補償緩衝系統或環境控制措施。.
問:我應該使用外部避震器,還是依靠內建緩衝系統?
內建式氣動緩衝系統應為首選方案——其具備整合性、成本效益,且足以滿足多數應用需求。當以下情況發生時,應增設外部減震器:動能超過緩衝容量(通常>50焦耳)、需因應不同負載進行調節、內建緩衝裝置磨損或損壞,或在極限速度(>2 m/s)下運作。 我們的Bepto技術團隊可為您精算特定能量需求,並推薦合適解決方案。.
