

Hysteresis1 is the invisible precision killer lurking in every proportional actuator system—silently destroying positioning accuracy by up to 15% while engineers blame everything except the real culprit. This phenomenon causes actuators to “remember” their previous positions, creating unpredictable dead zones that turn smooth control into frustrating inconsistency. 😠
Hysteresis in proportional actuator control creates positioning errors of 2-15% of full stroke due to mechanical backlash, seal friction, magnetic effects, and control valve dead bands, requiring compensation through software algorithms, mechanical preloading, higher-resolution feedback, and proper component selection to achieve sub-1% positioning accuracy.
Two months ago, I worked with Jennifer, a controls engineer at an aerospace manufacturing facility in Seattle, whose precision assembly robots were missing targets by 3mm consistently—not randomly, but in a predictable pattern that screamed hysteresis. After implementing our Bepto anti-hysteresis solutions, her positioning errors dropped to under 0.5mm. ✈️
Table of Contents
- What Exactly Is Hysteresis and Why Does It Occur in Proportional Actuators?
- How Does Hysteresis Impact Different Types of Proportional Control Systems?
- Which Measurement Techniques Best Identify and Quantify Hysteresis Effects?
- What Are the Most Effective Methods to Minimize Hysteresis in Your System?
What Exactly Is Hysteresis and Why Does It Occur in Proportional Actuators?
Understanding hysteresis mechanisms is essential for achieving precise proportional control in pneumatic and hydraulic actuator systems.
Hysteresis occurs when actuator output position depends on both current input command and previous position history, creating different response paths for increasing versus decreasing commands due to mechanical backlash, friction forces, magnetic effects, and control valve dead bands that accumulate throughout the control loop.
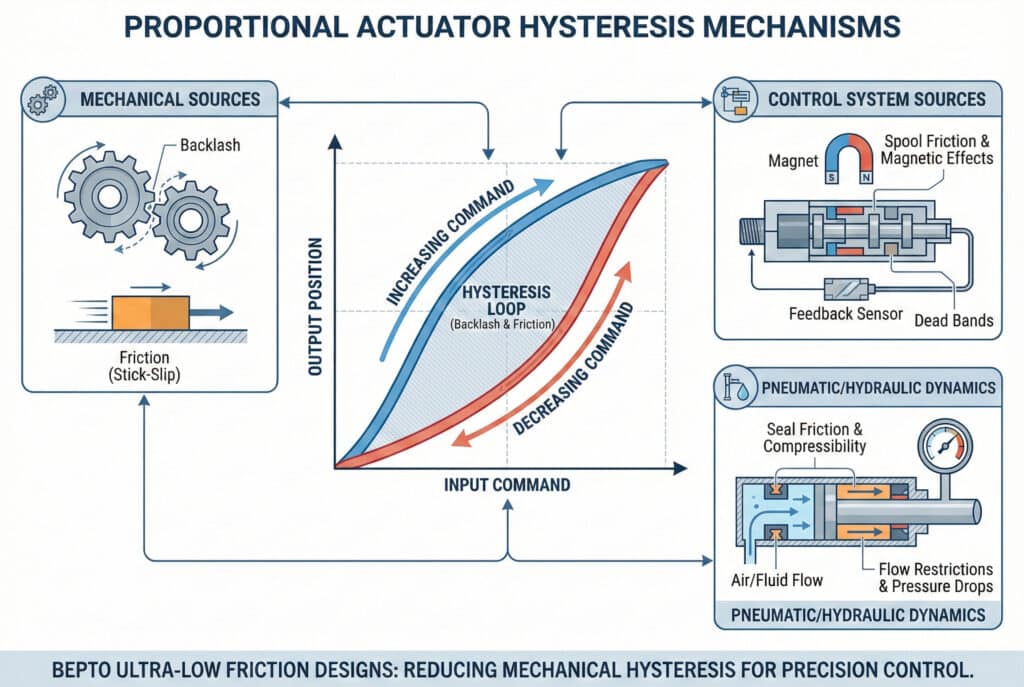
Fundamental Hysteresis Mechanisms
Mechanical Sources
Physical components contribute significantly to system hysteresis:
- Backlash2: Gear trains, couplings, and connections create dead zones
- Friction: Static and kinetic friction differences cause stick-slip behavior
- Compliance: Elastic deformation in mechanical linkages
- Wear patterns: Component wear creates irregular contact surfaces
Control System Sources
Electronic and pneumatic control elements add hysteresis:
| Component Type | Typical Hysteresis | Primary Cause | Mitigation Strategy |
|---|---|---|---|
| Servo valves | 0.1-0.5% | Spool friction | High-frequency dither |
| Proportional valves3 | 0.5-2% | Magnetic hysteresis | Feedback compensation |
| Position sensors | 0.05-0.2% | Electronic noise | Signal filtering |
| Amplifiers | 0.1-0.3% | Dead band settings | Calibration adjustment |
Physical Origins in Pneumatic Systems
Seal Friction Effects
Pneumatic seals create significant hysteresis sources:
- Breakaway friction: Higher force needed to initiate motion
- Running friction: Lower force during continuous motion
- stick-slip behavior4: Irregular motion at low speeds
- Temperature dependency: Friction changes with operating temperature
Pressure Dynamics
Pneumatic system pressure effects contribute to hysteresis:
- Compressibility: Air compression creates spring-like behavior
- Flow restrictions: Valve and fitting restrictions cause delays
- Pressure drops: Line losses create position-dependent forces
- Temperature effects: Thermal expansion affects system stiffness
At Bepto, we’ve engineered our rodless cylinders with ultra-low friction seals and precision-machined guide systems that reduce mechanical hysteresis by 60% compared to standard designs—critical for high-precision proportional control applications. 🎯
Load-Dependent Hysteresis
Variable Load Effects
External loads significantly influence hysteresis characteristics:
- Gravitational loads: Position-dependent force variations
- Inertial loads: Acceleration-dependent force requirements
- Process loads: Variable external forces during operation
- Friction loads: Surface contact force variations
Dynamic Load Interactions
Moving loads create complex hysteresis patterns:
- Acceleration effects: Inertial forces during speed changes
- Vibration coupling: External vibrations affect positioning
- Resonance interactions: Natural frequency excitation
- Damping variations: Load-dependent damping characteristics
How Does Hysteresis Impact Different Types of Proportional Control Systems?
Hysteresis effects vary significantly across different actuator technologies and control architectures, requiring tailored compensation strategies.
Open-loop proportional systems experience 5-15% hysteresis errors with no correction capability, while closed-loop systems can reduce hysteresis to 0.5-2% through feedback compensation, with advanced servo systems achieving sub-0.1% accuracy using high-resolution encoders and sophisticated control algorithms.
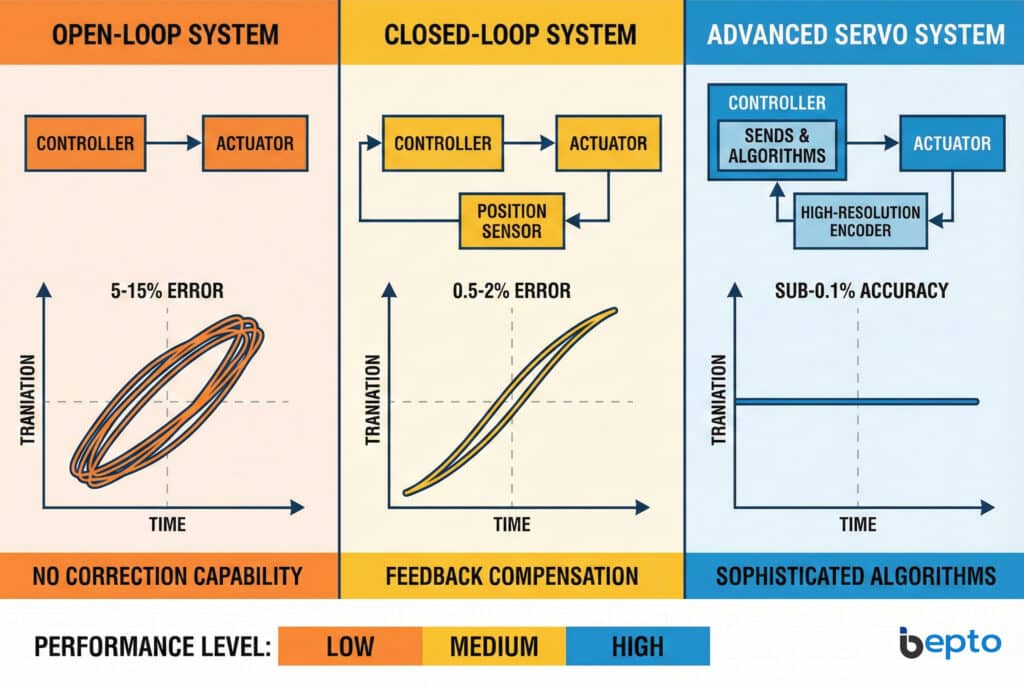
Open-Loop Control Systems
Inherent Limitations
Open-loop systems cannot compensate for hysteresis effects:
- No feedback correction: Errors accumulate without detection
- Predictable patterns: Hysteresis creates repeatable positioning errors
- Temperature sensitivity: Performance varies with operating conditions
- Load dependency: Different loads create different hysteresis patterns
Typical Performance Characteristics
Open-loop system hysteresis performance varies by application:
| Application Type | Hysteresis Range | Acceptable Uses | Performance Limitations |
|---|---|---|---|
| Simple positioning | 5-15% | Non-critical tasks | Poor repeatability |
| Speed control | 3-8% | Rough speed regulation | Variable performance |
| Force control | 10-25% | Basic force applications | Inconsistent output |
| Multi-axis systems | 8-20% | Simple automation | Cumulative errors |
Closed-Loop Control Systems
Feedback Compensation Benefits
Closed-loop systems can actively compensate for hysteresis:
- Error detection: Continuous position monitoring
- Real-time correction: Immediate response to positioning errors
- Adaptive control: Learning algorithms improve performance
- Disturbance rejection: External force compensation
Control Algorithm Effectiveness
Different control strategies handle hysteresis with varying success:
- PID control5: Basic compensation, 2-5% residual hysteresis
- Feedforward control: Predictive compensation, 1-3% residual
- Adaptive control: Learning compensation, 0.5-2% residual
- Model-based control: Theoretical compensation, 0.1-1% residual
Servo Control Systems
Advanced Compensation Techniques
High-performance servo systems employ sophisticated hysteresis compensation:
- Hysteresis mapping: System characterization and compensation tables
- Preload techniques: Mechanical bias to eliminate dead zones
- Dither signals: High-frequency excitation to overcome friction
- Predictive algorithms: Model-based hysteresis prediction
Michael, a robotics engineer at a precision manufacturing plant in North Carolina, implemented our recommended servo control upgrades on his assembly line. His positioning accuracy improved from ±2.5mm to ±0.3mm, reducing product defects by 75% and saving $50,000 monthly in rework costs. 🤖
Multi-Axis System Challenges
Cumulative Effects
Multiple actuators compound hysteresis problems:
- Error accumulation: Individual axis errors combine
- Coupling effects: Axis interactions create complex patterns
- Synchronization issues: Different hysteresis patterns cause coordination problems
- Calibration complexity: Multiple systems require individual tuning
Coordination Strategies
Advanced multi-axis systems use specialized techniques:
- Master-slave control: One axis leads, others follow
- Cross-coupling compensation: Axis interaction correction
- Synchronized positioning: Coordinated motion profiles
- Global optimization: System-wide performance optimization
Which Measurement Techniques Best Identify and Quantify Hysteresis Effects?
Accurate hysteresis measurement and characterization enables effective compensation strategy development and system optimization.
Hysteresis measurement requires bidirectional positioning tests with high-resolution encoders, recording position versus command relationships through complete cycles, analyzing loop width and asymmetry patterns, and documenting temperature and load dependencies to create comprehensive compensation maps for optimal control performance.
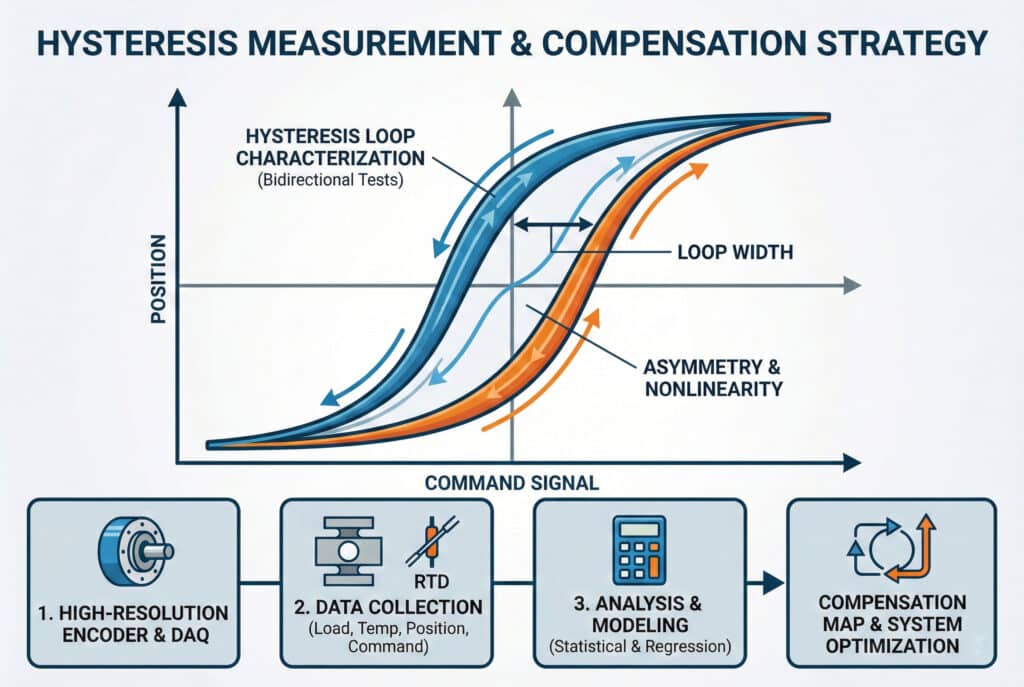
Standard Measurement Protocols
Bidirectional Positioning Tests
Comprehensive hysteresis characterization requires systematic testing:
- Full stroke cycles: Complete extension and retraction sequences
- Multiple speeds: Various velocity profiles to identify rate dependencies
- Load variations: Different external loads to map load effects
- Temperature ranges: Operating temperature impact assessment
Data Collection Requirements
Accurate hysteresis measurement demands high-quality instrumentation:
| Measurement Parameter | Required Resolution | Typical Equipment | Accuracy Target |
|---|---|---|---|
| Position feedback | 0.01% of stroke | Linear encoder | ±0.005% |
| Command signal | 12-bit minimum | DAQ system | ±0.1% |
| Load measurement | 1% of rated force | Load cell | ±0.5% |
| Temperature | ±1°C | RTD sensor | ±0.5°C |
Analysis Techniques
Hysteresis Loop Characterization
Mathematical analysis reveals hysteresis characteristics:
- Loop width: Maximum position difference at same command
- Asymmetry: Directional bias in positioning errors
- Nonlinearity: Deviation from ideal linear response
- Repeatability: Consistency across multiple cycles
Statistical Analysis Methods
Advanced analysis techniques quantify hysteresis effects:
- Standard deviation: Positioning repeatability measurement
- Correlation analysis: Input-output relationship strength
- Frequency analysis: Dynamic response characteristics
- Regression analysis: Mathematical model development
Real-Time Monitoring Systems
Continuous Hysteresis Tracking
Production systems benefit from ongoing hysteresis monitoring:
- Embedded sensors: Built-in position feedback systems
- Data logging: Continuous performance recording
- Trend analysis: Long-term performance degradation tracking
- Predictive maintenance: Early warning of component wear
Our Bepto diagnostic systems include real-time hysteresis monitoring that alerts operators when positioning errors exceed 0.5% thresholds, enabling proactive maintenance before precision degrades to unacceptable levels. 📊
Environmental Impact Assessment
Temperature Effects
Temperature significantly influences hysteresis characteristics:
- Thermal expansion: Mechanical dimension changes
- Viscosity changes: Fluid property variations
- Material properties: Elastic modulus temperature dependency
- Seal performance: Friction coefficient variations
Load Dependency Analysis
External loads create complex hysteresis patterns:
- Static loads: Constant force effects on positioning
- Dynamic loads: Variable force impact during motion
- Inertial effects: Acceleration-dependent positioning errors
- Friction variations: Surface condition impact on performance
What Are the Most Effective Methods to Minimize Hysteresis in Your System?
Implementing comprehensive hysteresis reduction strategies can achieve sub-1% positioning accuracy in demanding proportional control applications.
Effective hysteresis minimization combines mechanical improvements including low-friction components and backlash elimination, control system enhancements with feedforward compensation and adaptive algorithms, plus environmental controls for temperature and load stability, typically reducing hysteresis from 5-15% to under 1% of full scale.
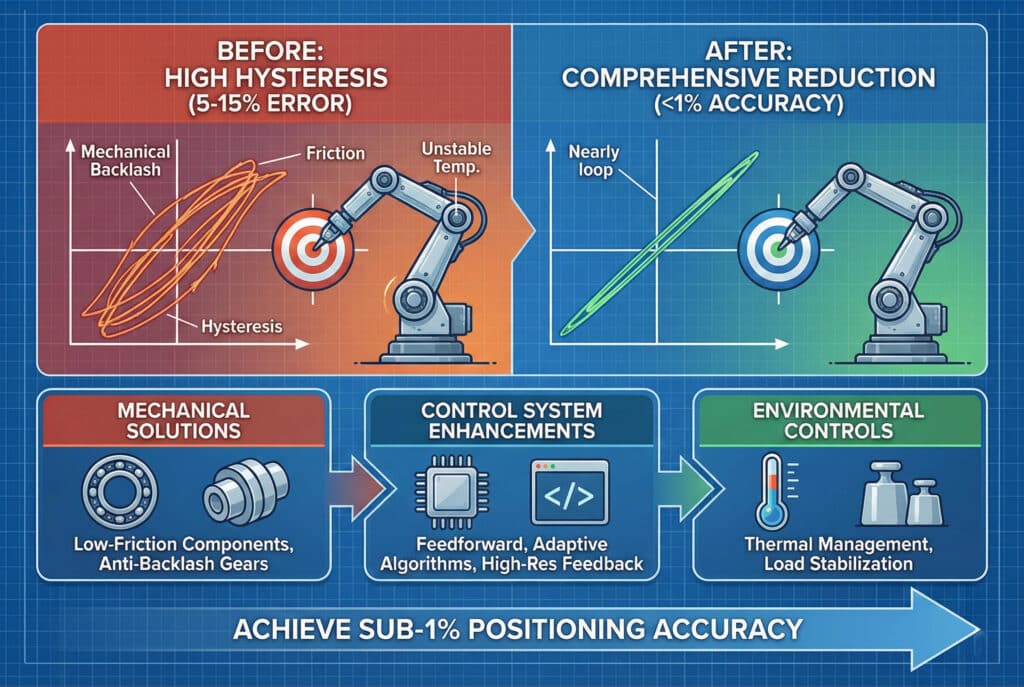
Mechanical Solutions
Component Selection and Design
Choose components specifically designed for low hysteresis:
- Precision bearings: High-quality linear guides with minimal play
- Low-friction seals: Advanced seal materials and designs
- Rigid couplings: Eliminate mechanical backlash sources
- Preloaded systems: Mechanical bias to eliminate dead zones
System Architecture Improvements
Design mechanical systems to minimize hysteresis sources:
| Design Feature | Hysteresis Reduction | Implementation Cost | Maintenance Impact |
|---|---|---|---|
| Direct drive | 80-90% | High | Low |
| Preloaded guides | 60-70% | Medium | Medium |
| Precision couplings | 40-50% | Low | Low |
| Anti-backlash gears | 70-80% | Medium | High |
Control System Enhancements
Software Compensation Techniques
Advanced control algorithms can significantly reduce hysteresis effects:
- Hysteresis mapping: Lookup tables for position correction
- Feedforward control: Predictive compensation based on command direction
- Adaptive algorithms: Self-learning hysteresis compensation
- Model-based control: Physics-based hysteresis prediction
Feedback System Improvements
Enhanced feedback systems enable better hysteresis compensation:
- Higher resolution encoders: Improved position measurement accuracy
- Multiple feedback sensors: Redundant position measurement
- Velocity feedback: Rate-based compensation algorithms
- Force feedback: Load-dependent hysteresis compensation
Environmental Control Strategies
Temperature Management
Stable operating temperatures reduce hysteresis variations:
- Thermal insulation: Protect actuators from temperature swings
- Active cooling: Maintain consistent operating temperatures
- Temperature compensation: Software correction for thermal effects
- Thermal preconditioning: Allow systems to reach thermal equilibrium
Load Stabilization
Consistent loading conditions minimize hysteresis variations:
- Load isolation: Decouple external disturbances
- Counterbalancing: Reduce gravitational load effects
- Vibration damping: Minimize dynamic load variations
- Process optimization: Reduce variable external forces
Sarah, a process engineer at a pharmaceutical packaging facility in Colorado, implemented our comprehensive hysteresis reduction program. Her tablet counting accuracy improved from 98.5% to 99.8%, meeting FDA requirements while reducing waste by $25,000 monthly. 💊
Advanced Compensation Techniques
Dither Signal Application
High-frequency excitation can overcome friction-based hysteresis:
- Frequency selection: Choose frequencies above system bandwidth
- Amplitude optimization: Balance effectiveness with system stability
- Waveform design: Sinusoidal, triangular, or random signals
- Implementation methods: Hardware or software generation
Predictive Control Methods
Model-based approaches provide superior hysteresis compensation:
- System identification: Mathematical model development
- Kalman filtering: Optimal state estimation
- Model predictive control: Future state optimization
- Adaptive modeling: Real-time model parameter updates
Maintenance and Calibration
Regular Calibration Procedures
Systematic calibration maintains low hysteresis performance:
- Periodic hysteresis mapping: Document performance changes
- Component inspection: Identify wear-related degradation
- Lubrication maintenance: Maintain optimal friction levels
- Alignment verification: Ensure mechanical precision
Predictive Maintenance Strategies
Proactive maintenance prevents hysteresis degradation:
- Performance trending: Track hysteresis changes over time
- Component life tracking: Replace components before failure
- Condition monitoring: Continuous system health assessment
- Preventive replacement: Schedule maintenance based on usage
At Bepto, our hysteresis reduction packages typically achieve 70-85% improvement in positioning accuracy, with many customers reporting sub-0.5% hysteresis levels in their most demanding applications—performance that directly translates to higher product quality and reduced waste. 🎯
Conclusion
Understanding and controlling hysteresis is essential for achieving precise proportional actuator control, requiring systematic measurement, targeted compensation, and ongoing maintenance for optimal performance.
FAQs About Hysteresis in Proportional Actuator Control
Q: What is considered acceptable hysteresis in proportional actuator systems?
Acceptable hysteresis depends on application requirements: general automation tolerates 2-5%, precision assembly needs under 1%, and ultra-precision applications require sub-0.5% hysteresis levels. Our Bepto systems typically achieve 0.3-0.8% hysteresis with proper implementation.
Q: Can software compensation completely eliminate mechanical hysteresis?
Software compensation can reduce hysteresis by 60-80% but cannot completely eliminate mechanical sources like backlash and friction. Combining mechanical improvements with software compensation achieves the best results, typically under 1% total system hysteresis.
Q: How often should I recalibrate my proportional control system for hysteresis?
Calibration frequency depends on usage intensity and precision requirements: high-precision systems need monthly calibration, general applications require quarterly checks, and low-precision systems can use annual calibration schedules with continuous performance monitoring.
Q: What’s the difference between hysteresis and backlash in actuator systems?
Backlash is mechanical play in connections and gears, while hysteresis includes all position-dependent effects including friction, magnetic effects, and control system dead bands. Backlash is one component of total system hysteresis.
Q: How do I know if hysteresis is causing my positioning problems?
Hysteresis creates characteristic patterns: consistent positioning errors that depend on approach direction, different accuracy when moving up versus down, and repeatable error patterns. Bidirectional positioning tests reveal hysteresis loops that confirm the diagnosis.
-
Learn about the physical principles of hysteresis and its impact on accuracy across different engineering disciplines. ↩
-
Understand the causes and engineering solutions for eliminating backlash in mechanical linkages. ↩
-
Explore the internal mechanics and operational principles of proportional pneumatic control valves. ↩
-
Discover the mechanics behind the stick-slip phenomenon and how it affects low-speed actuator motion. ↩
-
Gain a deeper understanding of PID control theory and its application in industrial automation. ↩
