

Einführung
Sie haben in ein hochentwickeltes servopneumatisches System investiert und erwarten servoelektrische Leistung zu pneumatischen Preisen – stattdessen kämpfen Sie mit Schwingungen, Überschwingungen und trägen Reaktionen, die Ihren Steuerungsingenieur zur Verzweiflung bringen. 😫 Ihre PID-Regelkreise stabilisieren sich nicht, Ihre Positioniergenauigkeit ist inkonsistent und Ihre Zykluszeiten sind länger als geplant. Das Problem liegt nicht an Ihrer Hardware oder Ihren Programmierkenntnissen – es ist die Luftkompressibilität, der unsichtbare Feind, der Ihre präzise abgestimmten Regelalgorithmen zu reiner Spekulation macht.
Die Luftkompressibilität führt zu einem nichtlinearen, druckabhängigen Federeffekt in servopneumatischen Regelkreisen, der eine Phasenverzögerung verursacht, die Eigenfrequenz verringert und eine positionsabhängige Dynamik erzeugt. Dies erfordert spezielle Modellierungs- und Kompensationsstrategien, um eine stabile, leistungsstarke Regelung zu erreichen. Im Gegensatz zu hydraulischen oder elektrischen Systemen mit starrer mechanischer Kupplung müssen pneumatische Systeme berücksichtigen, dass Luft als Feder mit variabler Steifigkeit zwischen Ihrem Ventil und Ihrer Last wirkt.
Ich habe Dutzende von servopneumatischen Systemen auf drei Kontinenten in Betrieb genommen, und die Modellierung der Kompressibilität ist der Punkt, an dem die meisten Ingenieure scheitern. Erst im letzten Quartal habe ich einem Robotik-Integrator in Kalifornien dabei geholfen, ein Projekt zu retten, das drei Monate hinter dem Zeitplan lag, weil dessen Steuerungsteam die pneumatische Kompressibilität bei der Servoabstimmung nicht berücksichtigt hatte.
Inhaltsübersicht
- Was ist der Kompressibilitätsfaktor und warum dominiert er die servopneumatische Dynamik?
- Wie modelliert man die Luftkompressibilität in Steuerungssystemen mathematisch?
- Welche Regelungsstrategien kompensieren Kompressibilitätseffekte?
- Wie können Bepto-Rodless-Zylinder die servopneumatische Leistung verbessern?
Was ist der Kompressibilitätsfaktor und warum dominiert er die servopneumatische Dynamik?
Die Kompressibilität der Luft ist nicht nur eine kleine Unannehmlichkeit – sie verändert grundlegend das Verhalten Ihres Steuerungssystems. 🌪️
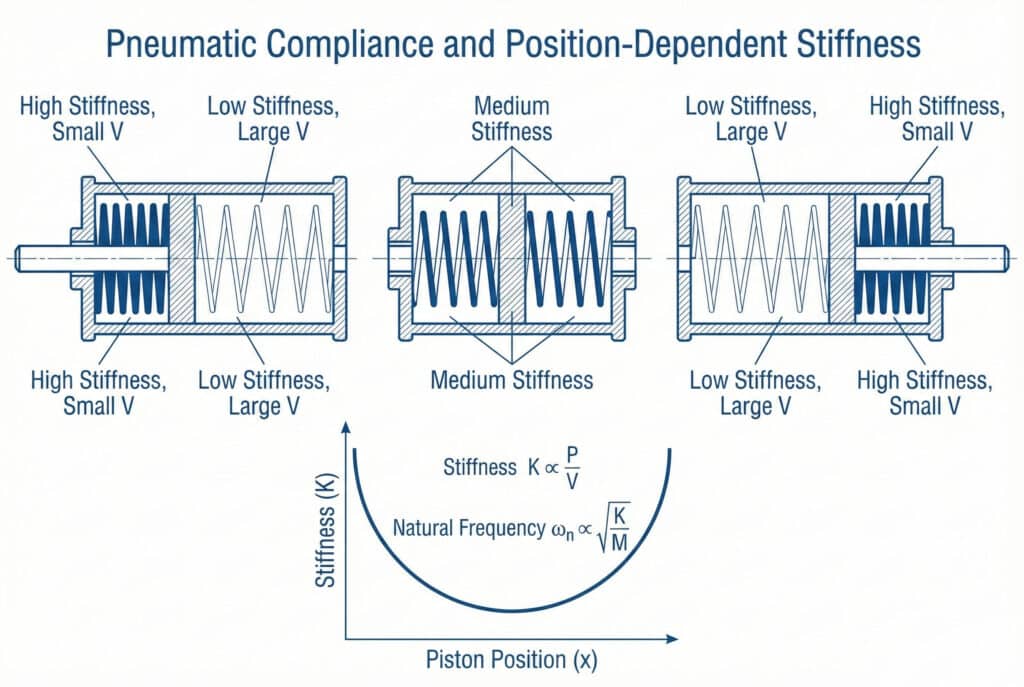
Der Kompressibilitätsfaktor beschreibt, wie sich das Luftvolumen mit dem Druck gemäß der ideales Gasgesetz1 (PV=nRT), wodurch eine pneumatische Feder mit einer Steifigkeit entsteht, die proportional zum Druck und umgekehrt proportional zum Volumen ist. Dieser Federeffekt führt zu einer Resonanzfrequenz von typischerweise zwischen 3 und 15 Hz, die die Regelungsbandbreite begrenzt, Überschwingungen verursacht und die Systemdynamik stark von Position, Last und Versorgungsdruck abhängig macht. Während elektrische und hydraulische Antriebe sich wie starre mechanische Systeme verhalten, verhalten sich servopneumatische Antriebe wie Masse-Feder-Dämpfer-Systeme, bei denen sich die Federsteifigkeit ständig ändert.
Die Physik der pneumatischen Nachgiebigkeit
Wenn Sie eine Zylinderkammer unter Druck setzen, erzeugen Sie nicht nur Kraft, sondern komprimieren auch Luftmoleküle auf ein kleineres Volumen. Diese komprimierte Luft wirkt wie eine elastische Feder, die Energie speichert. Diese Beziehung wird bestimmt durch:
$$
P × V = n × R × T
$$
Wo:
- P = Absolutdruck (Pa)
- V = Volumen (m³)
- n = Anzahl der Mol Gas
- R = universelle Gaskonstante (8,314 J/mol·K)
- T = absolute Temperatur (K)
Zu Kontrollzwecken interessiert uns, wie sich der Druck mit der Volumenänderung verändert:
$$
\Delta P = -\left( \frac{\kappa \, P_{0}}{V_{0}} \right) \times \Delta V
$$
Wobei κ die polytroper Exponent2 (1,0 für isotherme, 1,4 für adiabatische Prozesse).
Diese Gleichung offenbart die entscheidende Erkenntnis: Die pneumatische Steifigkeit ist proportional zum Druck und umgekehrt proportional zum Volumen.. Doppelte Druckbelastung, doppelte Steifigkeit. Doppeltes Volumen, halbe Steifigkeit.
Warum dies für die Kontrolle wichtig ist
In einem servoelektrischen System treibt der Motor bei einem Bewegungsbefehl die Last direkt über eine starre mechanische Kupplung an. Die Übertragungsfunktion ist relativ einfach – im Wesentlichen ein Integrator mit etwas Reibung.
In einem servopneumatischen System regelt das Ventil den Druck, der Druck erzeugt über den Kolbenbereich eine Kraft, aber diese Kraft muss Luft komprimieren oder expandieren, bevor sie die Last bewegt. Sie haben:
Ventil → Druck → Pneumatikfeder → Lastbewegung
Diese pneumatische Feder führt zu einer Dynamik zweiter Ordnung (Resonanz), die das Systemverhalten dominiert.
Positionsabhängige Dynamik
Hier wird es knifflig: Wenn sich Ihr Zylinder ausdehnt, nimmt das Volumen auf der einen Seite zu, während es auf der anderen Seite abnimmt. Das bedeutet:
- Die pneumatische Steifigkeit ändert sich mit der Position. (höher an den Hubenden, niedriger in der Hubmitte)
- Die Eigenfrequenz variiert über den Hub hinweg. (kann sich um das 2- bis 3-fache ändern)
- Optimale Regelungsgewinne sind positionsabhängig (Gewinne, die an einer Stelle funktionieren, verursachen Instabilität an einer anderen Stelle)
Typische Eigenschaften pneumatischer Systeme
| Parameter | Servoelektrisch | Servohydraulisch | Servo-pneumatisch |
|---|---|---|---|
| Kupplungssteifigkeit | Unendlich (starr) | Sehr hoch | Niedrig (variabel) |
| Natürliche Frequenz | 50-200 Hz | 30–100 Hz | 3–15 Hz |
| Bandbreite | 20–50 Hz | 10-30 Hz | 1–5 Hz |
| Positionsabhängigkeit | Keine | Minimal | Schwere |
| Dämpfungsverhältnis | 0.1-0.3 | 0.3-0.7 | 0.1-0.4 |
| Nichtlinearität | Niedrig | Mittel | Hoch |
Folgen in der realen Welt
David, ein Steuerungsingenieur in einem Automobilwerk in Ohio, raufte sich wegen eines servopneumatischen Pick-and-Place-Systems die Haare. Die Positioniergenauigkeit variierte zwischen ±0,5 mm an den Hubenden und ±3 mm in der Hubmitte. Er hatte wochenlang verschiedene PID-Verstärkungen ausprobiert, aber keine Einstellungen gefunden, die über den gesamten Hub hinweg funktionierten.
Als ich sein System analysierte, war das Problem offensichtlich: Er behandelte den pneumatischen Aktuator wie einen elektrischen Servo. In der Mitte des Hubs sorgten die großen Luftvolumina für eine geringe Steifigkeit und eine Eigenfrequenz von 4 Hz. Am Ende des Hubs sorgten die komprimierten Volumina für eine hohe Steifigkeit und eine Eigenfrequenz von 12 Hz – eine dreifache Veränderung! Sein PID-Regler mit fester Verstärkung konnte diese Schwankungen unmöglich bewältigen.
Wir haben implementiert Gewinnplanung3 basierend auf der Position und zusätzlicher Feedforward-Druckkompensation. Seine Positioniergenauigkeit verbesserte sich auf ±0,8 mm über den gesamten Hub, und seine Zykluszeit sank um 20%, da wir aggressivere Verstärkungen ohne Instabilität verwenden konnten. 🎯
Wie modelliert man die Luftkompressibilität in Steuerungssystemen mathematisch?
Was man nicht modellieren kann, kann man auch nicht steuern – und eine genaue Modellierung ist die Grundlage für eine effektive servopneumatische Steuerung. 📐
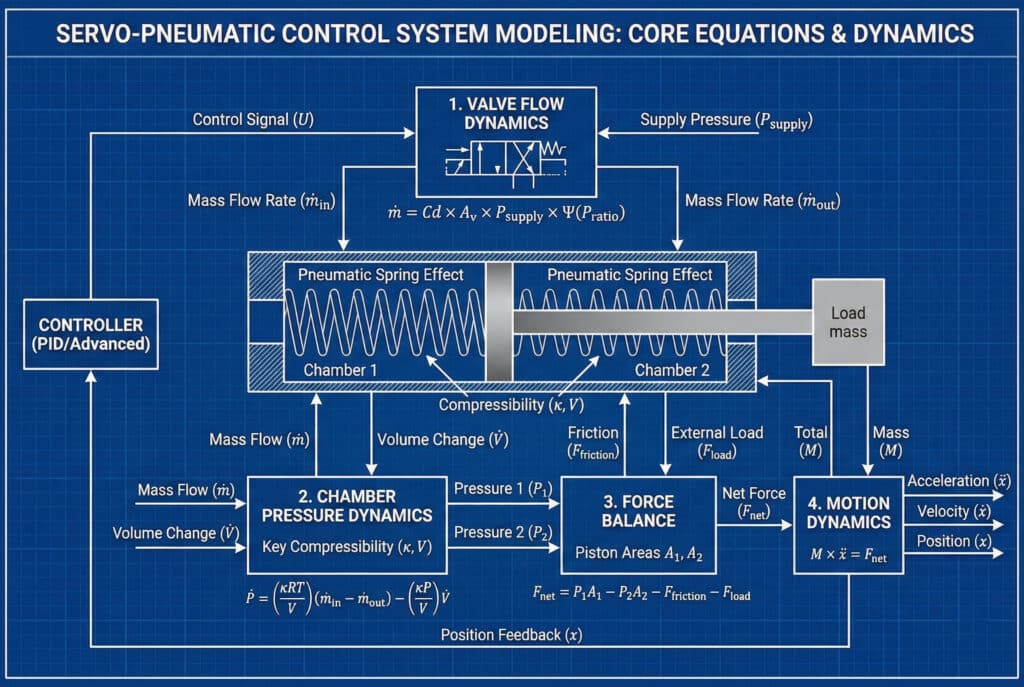
Das standardmäßige servopneumatische Modell behandelt jede Zylinderkammer als Druckbehälter mit variablem Volumen, wobei der Massenfluss hinein und heraus durch die Ventildynamik, die Druck-Kraft-Umwandlung durch die Kolbenfläche und die Lastbewegung durch das zweite Newtonsche Gesetz geregelt wird. Dies führt zu einem nichtlinearen Differentialgleichungssystem vierter Ordnung, das für die Steuerungsauslegung um Betriebspunkte linearisiert werden kann. Dieses Modell erfasst die wesentlichen Kompressibilitätseffekte und bleibt gleichzeitig für die Implementierung einer Echtzeitsteuerung handhabbar.
Die Kerngleichungen
Ein vollständiges servopneumatisches Modell besteht aus vier gekoppelten Teilsystemen:
1. Ventilströmungsdynamik
Der Massenstrom in jede Kammer hängt von der Ventilöffnung und der Druckdifferenz ab:
$$
\dot{m}
= C_{d} \times A_{v} \times P_{Versorgung} \times \Psi(P_{Verhältnis})
$$
Wo:
- ṁ = Massenstrom (kg/s)
- Cd = Entladungskoeffizient (typischerweise 0,6–0,8)
- A_v = Ventilöffnungsfläche (m²)
- Ψ = Durchflussfunktion (abhängig vom Druckverhältnis)
2. Kammerdruckdynamik
Druckänderungen basierend auf Massenstrom und Volumenänderung:
Ṗ = (κ × R × T / V) × (ṁ_in – ṁ_out) – (κ × P / V) × V̇
Dies ist die grundlegende Kompressibilitätsgleichung. Der erste Term steht für die Druckänderung aufgrund des Massenstroms. Der zweite Term steht für die Druckänderung aufgrund der Volumenänderung (Kompression/Expansion).
3. Kräftegleichgewicht
Netto-Kraft auf den Kolben/Schlitten:
$$
F_{net}
= P_{1} \times A_{1}
– P_{2} \times A_{2}
– F_{Reibung}
– F_{Last}
$$
Wo:
- P₁, P₂ = Kammerdrücke
- A₁, A₂ = effektive Kolbenflächen
- F_Reibung = Reibungskraft (geschwindigkeitsabhängig)
- F_load = externe Lastkraft
4. Bewegungsdynamik
Newtons zweites Gesetz:
$$
M \,\dot{x} = F_{net}
$$
Wobei M die gesamte bewegte Masse und x die Position ist.
Linearisierung für die Reglerauslegung
Das oben genannte nichtlineare Modell ist für die klassische Regelungsauslegung zu komplex. Wir linearisieren um einen Betriebspunkt (Gleichgewichtsposition und -druck):
Übertragungsfunktion4:
$$
\frac{X(s)}{U(s)}
= \frac{K}{\,s^{2} + 2 \zeta \omega_{n} s + \omega_{n}^{2}\,}
$$
Dies offenbart die kritische Dynamik zweiter Ordnung mit:
$$
\omega_{n}
= \sqrt{\frac{\kappa \, P_{avg} \, A^{2}}{M \, V_{avg}}}
$$
— Eigenfrequenz
ζ = Dämpfungsverhältnis (abhängig von Reibung und Ventildynamik)
Wichtige Erkenntnisse aus dem Modell
Abhängigkeit von der Eigenfrequenz
Die Eigenfrequenzgleichung zeigt, dass ω_n mit folgenden Faktoren zunimmt:
- Höherer Druck (steifere Luftfeder)
- Größere Kolbenfläche (mehr Kraft pro Druckänderung)
- Geringeres Volumen (steifere Feder)
- Geringere Masse (leichter zu beschleunigen)
Lautstärkeschwankungen je nach Position
Für einen Zylinder mit der Hublänge L und der Kolbenfläche A:
$$
V_{1}(x) = V_{tot} + A \times x
$$
$$
V_{2}(x) = V_{dead} + A \times (L – x)
$$
Wobei V_dead das Totvolumen (Anschlüsse, Schläuche, Verteiler) ist.
Diese Positionsabhängigkeit führt dazu, dass die Eigenfrequenz über den Hub hinweg erheblich variiert.
Praktische Überlegungen zur Modellierung
| Komplexität der Modelle | Genauigkeit | Berechnung | Anwendungsfall |
|---|---|---|---|
| Einfache 2. Ordnung | ±30% | Sehr niedrig | Anfänglicher Entwurf, einfache PID |
| Linearisierte 4. Ordnung | ±15% | Niedrig | Klassischer Regelungsentwurf |
| Nichtlineare Simulation | ±5% | Mittel | Gewinnplanung, Vorwärtskopplung |
| CFD-basiertes Modell | ±2% | Sehr hoch | Forschung, höchste Präzision |
Parameteridentifikation
Um diese Modelle zu verwenden, benötigen Sie die tatsächlichen Systemparameter:
Gemessene Parameter:
- Zylinderbohrung und Hub (aus Datenblatt)
- Bewegliche Masse (wiegen)
- Versorgungsdruck (Manometer)
- Totvolumen (Maßschläuche und Anschlüsse)
Identifizierte Parameter:
- Reibungskoeffizienten (Stufenantwortprüfung)
- Ventildurchflusskoeffizienten (Druckabfallprüfung)
- Effektiver Kompressionsmodul (Frequenzgangprüfung)
Bepto's Modellierungsunterstützung
Bei Bepto stellen wir detaillierte pneumatische Parameter für alle unsere kolbenstangenlosen Zylinder zur Verfügung:
- Präzise Bohrungs- und Hubabmessungen
- Gemessene Totvolumina für jede Portkonfiguration
- Effektive Kolbenflächen unter Berücksichtigung der Dichtungsreibung
- Empfohlene Modellierungsparameter basierend auf Werksprüfungen
Diese Daten ersparen Ihnen wochenlange Arbeit bei der Systemidentifikation und stellen sicher, dass Ihre Modelle der Realität entsprechen. 📊
Welche Regelungsstrategien kompensieren Kompressibilitätseffekte?
Eine Standard-PID-Regelung reicht nicht aus – Servopneumatik erfordert spezielle Regelungsstrategien, die die Kompressibilität berücksichtigen. 🎮
Eine effektive servopneumatische Steuerung erfordert die Kombination mehrerer Strategien: Gain Scheduling, das die Reglerparameter basierend auf Position und Druck anpasst, um unterschiedliche Dynamiken zu bewältigen, Feedforward-Kompensation, die den erforderlichen Druck basierend auf der gewünschten Beschleunigung vorhersagt, um den Nachlauffehler zu reduzieren, und Druckrückführung, die einen inneren Regelkreis um die Kammerdrücke schließt, um die effektive Steifigkeit zu erhöhen – zusammen erzielen sie eine 2- bis 3-fache Verbesserung der Bandbreite im Vergleich zu einer einfachen PID-Regelung. Der Schlüssel liegt darin, die Kompressibilität als bekannten, kompensierbaren Effekt zu behandeln und nicht als unbekannte Störung.
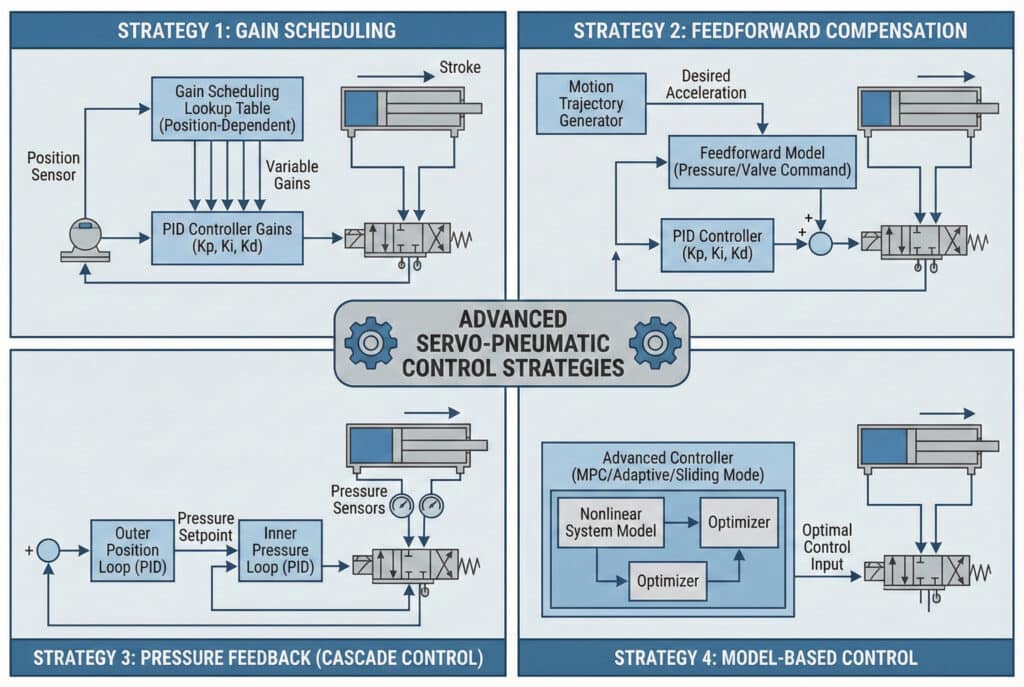
Strategie 1: Gewinnplanung
Da sich die Systemdynamik mit der Position ändert, verwenden Sie positionsabhängige Regelverstärkungen:
$$
K_{p}(x)
= K_{p0} \times \sqrt{\frac{V_{avg}}{V(x)}}
$$
Dies gleicht Steifigkeitsschwankungen aus, indem die Verstärkung bei geringer Steifigkeit (in der Mitte des Hubs) erhöht und bei hoher Steifigkeit (am Ende des Hubs) verringert wird.
Umsetzung
- Teilen Sie den Hub in 5 bis 10 Zonen auf.
- PID-Verstärkungen für jede Zone einstellen
- Interpoliere Verstärkungen basierend auf der aktuellen Position
- Aktualisierung erfolgt in jedem Regelzyklus (typischerweise 1–5 ms)
Vorteile
- Gleichbleibende Leistung über den gesamten Hub
- Kann aggressivere Gewinne erzielen, ohne instabil zu werden.
- Bewältigt Lastschwankungen besser
Herausforderungen
- Erfordert genaue Positionsrückmeldung
- Anfangs komplexer zu stimmen
- Potenzial für Gewinnumschalt-Transienten
Strategie 2: Feedforward-Kompensation
Erfordert die erforderlichen Ventilbefehle basierend auf der gewünschten Bewegung vorherzusagen:
$$
u_{ff}
= \frac{M \,\ddot{x}{gewünscht} + F{Reibung} + F_{Last}}
{\Delta P \times A}
$$
Dann fügen Sie die Druckvorhersage hinzu:
$$
\Delta P_{erforderlich}
= \frac{M \,\ddot{x}_{gewünscht}}{A}
$$
Dadurch werden die zur Erzielung der gewünschten Beschleunigung erforderlichen Druckänderungen vorweggenommen, wodurch der Nachlauffehler drastisch reduziert wird.
Umsetzung
- Differenzieren Sie den Positionsbefehl zweimal, um die gewünschte Beschleunigung zu erhalten.
- Berechnen Sie den erforderlichen Druckunterschied.
- In Ventilbefehl unter Verwendung des Ventildurchflussmodells umwandeln
- Zum Feedback-Controller-Ausgang hinzufügen
Vorteile
- Reduziert den Tracking Error um 60-80%
- Ermöglicht schnellere Bewegungen ohne Überschwingen
- Verbessert die Wiederholbarkeit
Strategie 3: Druckrückmeldung (Kaskadenregelung)
Implementieren Sie eine Zwei-Schleifen-Kontrollstruktur:
Äußerer Ring: Positionsregler erzeugt gewünschte Druckdifferenz
Innerer Ring: Schneller Druckregler steuert Ventil, um gewünschte Drücke zu erreichen
Dadurch wird die Systemsteifigkeit durch aktive Steuerung der pneumatischen Feder effektiv erhöht.
Umsetzung
Äußerer Schleifen (Position):
Fehlerposition = x_gewünscht – x_tatsächlich
ΔP_gewünscht = PID_Position(Fehler_Pos)
Innerer Kreislauf (Druck):
Fehler_P1 = P1_Sollwert – P1_Istwert
Fehler_P2 = P2_gewünscht – P2_tatsächlich
u_ventil = PID_Druck(Fehler_P1, Fehler_P2)
Vorteile
- Erhöht die effektive Bandbreite um das 2- bis 3-fache.
- Bessere Störungsunterdrückung
- Konsistentere Leistung
Anforderungen
- Schnelle, genaue Drucksensoren in jeder Kammer
- Hochgeschwindigkeits-Regelkreis (>500 Hz)
- Qualitätsproportionalventile
Strategie 4: Modellbasierte Regelung
Verwenden Sie das vollständige nichtlineare Modell für die erweiterte Steuerung:
Gleitmodusregelung: Robust gegenüber Parameterschwankungen und Störungen
Modellprädiktive Regelung (MPC)5: Optimiert die Kontrolle über den zukünftigen Zeithorizont
Adaptive Steuerung: Passt Modellparameter automatisch online an
Diese fortschrittlichen Strategien können eine nahezu servoelektrische Leistung erzielen, erfordern jedoch einen erheblichen technischen Aufwand.
Vergleich der Kontrollstrategien
| Strategie | Performance-Gewinn | Komplexität der Implementierung | Hardware-Anforderungen |
|---|---|---|---|
| Grundlegende PID | Basislinie | Niedrig | Nur Positionssensor |
| Gewinnplanung | +30-50% | Mittel | Positionssensor |
| Feedforward | +60-80% | Mittel | Positionssensor |
| Druckrückmeldung | +100-150% | Hoch | Position + 2 Drucksensoren |
| Modellbasiert | +150-200% | Sehr hoch | Mehrere Sensoren + schneller Prozessor |
Praktische Tuning-Richtlinien
Für einen PID-Regler mit Vorsteuerung und Gewinnplanung (der Sweet Spot für die meisten Anwendungen):
- Beginnen Sie mit der Abstimmung in der Mitte des Hubs.: PID-Verstärkungen bei 50%-Hub abstimmen, wo die Dynamik “durchschnittlich” ist.”
- Feedforward hinzufügenImplementierung einer Beschleunigungsvorsteuerung mit konservativer Verstärkung (Beginn bei 50% des berechneten Wertes)
- Verstärkungsplanung implementieren: Skalieren Sie proportionale und derivative Verstärkungen basierend auf der Position.
- IterierenFeinabstimmung in jeder Zone, mit Schwerpunkt auf Übergangsbereichen
- Test unter verschiedenen BedingungenÜberprüfen Sie die Leistung bei unterschiedlichen Lasten und Drehzahlen.
Eine Erfolgsgeschichte
Maria leitet ein Unternehmen für kundenspezifische Automatisierung in Texas, das Hochgeschwindigkeits-Verpackungsmaschinen herstellt. Sie hatte Probleme mit einem servopneumatischen System, das Verpackungen mit einer Geschwindigkeit von 2 m/s auf ±1 mm genau positionieren musste. Die Standard-PID-Regelung lieferte ihr eine Genauigkeit von ±4 mm mit starken Schwankungen.
Wir haben eine dreiteilige Strategie umgesetzt:
- Gewinnplanung basierend auf Position (5 Zonen)
- Beschleunigungsvorsteuerung (70% des berechneten Wertes)
- Optimierte Bepto-Reibungsarme stangenlose Zylinder zur Minimierung der Reibungsunsicherheit
Die Ergebnisse waren dramatisch:
- Die Positioniergenauigkeit wurde von ±4 mm auf ±0,8 mm verbessert.
- Die Absetzzeit wurde um 40% reduziert.
- Die Zykluszeit wurde um 25% reduziert.
- Das System wurde über den gesamten Lastbereich (0–50 kg) stabil.
Die gesamte Implementierung nahm zwei Tage Entwicklungszeit in Anspruch, und dank der Leistungssteigerung konnte sie drei neue Aufträge gewinnen, die engere Toleranzen erforderten. 💪
Wie können Bepto-Rodless-Zylinder die servopneumatische Leistung verbessern?
Der Zylinder selbst ist eine entscheidende Komponente für die servopneumatische Leistung – und nicht alle Zylinder sind gleich. ⚙️
Bepto-kolbenstangenlose Zylinder verbessern die servopneumatische Steuerung durch vier wesentliche Merkmale: minimiertes Totvolumen, das die pneumatische Steifigkeit und Eigenfrequenz um 30-40% erhöht, reibungsarme Dichtungen, die Reibungsunsicherheiten reduzieren und die Modellgenauigkeit verbessern, symmetrisches Design, das die Dynamik in beide Richtungen ausgleicht, und präzise Fertigung, die konsistente Parameter über den gesamten Hub gewährleistet – und das alles zu einem Preis, der 30% unter dem von OEM-Alternativen liegt, und mit einer Lieferzeit von wenigen Tagen statt Wochen. Wenn Sie mit Kompressibilitätseffekten zu kämpfen haben, kommt es auf jedes Detail des Designs an.

Konstruktionsmerkmal 1: Optimiertes Totvolumen
Totvolumen ist der Feind der servopneumatischen Leistung. Es handelt sich dabei um das Luftvolumen in Anschlüssen, Verteilern und Schläuchen, das nicht zur Kraft beiträgt, sondern zur Nachgiebigkeit (Federkraft).
Bepto-Vorteil:
- Das integrierte Portdesign minimiert die internen Durchgänge.
- Kompakte Verteileroptionen reduzieren das Außenvolumen
- Optimierte Portgröße sorgt für ein ausgewogenes Verhältnis zwischen Durchfluss und Volumen
Auswirkung:
- 30-40% weniger Totvolumen als herkömmliche kolbenstangenlose Zylinder
- Die Eigenfrequenz stieg um 20-30%.
- Schnellere Reaktion und höhere Bandbreite
Volumenvergleich
| Konfiguration | Totvolumen pro Kammer | Eigenfrequenz (typisch) |
|---|---|---|
| Standard ohne Stange + Standardanschlüsse | 150–200 cm³ | 5–7 Hz |
| Standard ohne Stange + optimierte Anschlüsse | 100–150 cm³ | 7–9 Hz |
| Bepto ohne Stange + integrierte Anschlüsse | 60–100 cm³ | 9–12 Hz |
Konstruktionsmerkmal 2: Reibungsarme Dichtungen
Reibung ist die größte Quelle für Modellunsicherheit in der Servopneumatik. Hohe oder inkonsistente Reibung macht die Feedforward-Kompensation unwirksam und erfordert hohe Rückkopplungsverstärkungen (die die Stabilitätsreserven verringern).
Bepto-Vorteil:
- Fortschrittliche Polyurethan-Dichtungen mit Reibungsmodifikatoren
- 40% geringere Losbrechreibung als bei Standarddichtungen
- Gleichmäßigere Reibung über Temperatur und Geschwindigkeit hinweg
- Längere Lebensdauer (über 10 Millionen Zyklen) sorgt für gleichbleibende Leistung
Auswirkung:
- Genauere Kraftvorhersage (±5% gegenüber ±15%)
- Bessere Feedforward-Leistung
- Geringere erforderliche Rückkopplungsverstärkung
- Reduziertes Stick-Slip-Verhalten
Designmerkmal 3: Symmetrisches Design
Viele stangenlose Zylinder haben eine asymmetrische Innengeometrie, die in jeder Richtung eine unterschiedliche Dynamik verursacht. Dies verdoppelt Ihren Aufwand für die Steuerungsabstimmung.
Bepto-Vorteil:
- Symmetrische Anordnung und Dimensionierung der Anschlüsse
- Ausgewogene Dichtungsreibung in beiden Richtungen
- Gleiche effektive Flächen (kein Unterschied in der Stabfläche)
Auswirkung:
- Ein einziger Satz von Regelverstärkungen funktioniert für beide Richtungen.
- Vereinfachte Gewinnplanung
- Vorhersehbareres Verhalten
Designmerkmal 4: Präzisionsfertigung
Die servopneumatische Steuerung basiert auf präzisen Modellen. Fertigungstoleranzen führen zu Modellabweichungen, die die Leistung beeinträchtigen.
Bepto-Vorteil:
- Bohrungstoleranz: H7 (±0,015 mm bei 50 mm Bohrung)
- Geradheit der Führungsschiene: 0,02 mm/m
- Gleichmäßige Dichtungskompression während der gesamten Produktion
- Passende Lagersätze
Auswirkung:
- Modelle entsprechen der Realität innerhalb von 5-10%
- Gleichbleibende Leistung von Einheit zu Einheit
- Reduzierte Inbetriebnahmezeit
Vorteile auf Systemebene
Wenn Sie diese Funktionen in einem kompletten servopneumatischen System kombinieren:
| Leistungsmetrik | Standard-Zylinder | Bepto-Zylinder ohne Stange | Verbesserung |
|---|---|---|---|
| Natürliche Frequenz | 6 Hz | 10 Hz | +67% |
| Erreichbare Bandbreite | 2 Hz | 4 Hz | +100% |
| Positionierungsgenauigkeit | ±2mm | ±0,8 mm | +60% |
| Ablagerungszeit | 400 ms | 200ms | -50% |
| Modellgenauigkeit | ±15% | ±5% | +67% |
| Reibungsvariation | ±20% | ±8% | +60% |
Anwendungstechnische Unterstützung
Wenn Sie sich für Bepto für servopneumatische Anwendungen entscheiden, erhalten Sie mehr als nur einen Zylinder:
✅ Detaillierte pneumatische Parameter für eine genaue Modellierung
✅ Kostenlose Beratung zur Kontrollstrategie (Das sind ich und mein Team! 👋)
✅ Empfohlene Ventilgröße für optimale Leistung
✅ Beispiel für einen Steuerungscode für gängige SPSen
✅ Anwendungsspezifische Prüfung die Leistung zu überprüfen, bevor Sie sich festlegen
Kosten-Leistungs-Analyse
Vergleichen wir die Gesamtsystemkosten und die Leistung:
Option A: Premium-OEM-Zylinder + Standardsteuerung
- Zylinderkosten: $2.500
- Regeltechnik: 40 Stunden @ $100/Stunde = $4.000
- Leistung: ±2 mm, 2 Hz Bandbreite
- Gesamt: $6.500
Option B: Bepto-Zylinder + optimierte Steuerung
- Zylinderkosten: $1.750 (30% weniger)
- Regelungstechnik: 24 Stunden @ $100/Stunde = $2.400 (weniger Abstimmung erforderlich)
- Leistung: ±0,8 mm, 4 Hz Bandbreite
- Gesamt: $4.150
Einsparungen: $2.350 (36%) bei besserer Leistung 💰
Warum servopneumatische Integratoren sich für Bepto entscheiden
Wir wissen, dass die servopneumatische Steuerung eine Herausforderung darstellt. Die Kompressibilität von Luft ist ein grundlegendes physikalisches Problem, das nicht beseitigt werden kann – aber es kann minimiert und kompensiert werden. Unsere kolbenstangenlosen Zylinder wurden speziell entwickelt, um die Kompressibilitätseffekte zu reduzieren, die die Steuerung erschweren:
- Höhere Steifigkeit durch reduziertes Totvolumen
- Vorhersehbarere Reibung durch fortschrittliche Dichtungen
- Bessere Modellgenauigkeit durch Präzisionsfertigung
- Schnellere Lieferung (3–5 Tage), damit Sie schnell iterieren können
- Niedrigere Kosten damit Sie sich bessere Ventile und Sensoren leisten können
Wenn Sie ein servopneumatisches System bauen, ist der Zylinder Ihr Fundament. Bauen Sie auf einem soliden Fundament, dann wird alles andere einfacher. 🎯
Schlussfolgerung
Die Beherrschung der Luftkompressibilität durch genaue Modellierung und fortschrittliche Regelungsstrategien – kombiniert mit einem optimierten Zylinderdesign – verwandelt die Servopneumatik von einem frustrierenden Kompromiss in eine kostengünstige, leistungsstarke Lösung, die in vielen Anwendungen mit servoelektrischen Systemen konkurrieren kann. 🚀
Häufig gestellte Fragen zur Kompressibilität in servopneumatischen Steuerungen
Warum kann ich nicht einfach einen höheren Druck verwenden, um Kompressibilitätseffekte zu eliminieren?
Ein höherer Druck erhöht die pneumatische Steifigkeit und die Eigenfrequenz und verbessert die Leistung um 20-30%, kann jedoch die Kompressibilität nicht beseitigen, da das Verhältnis zwischen Druck und Volumen nichtlinear bleibt und ein höherer Druck auch die Reibungskräfte und den Verschleiß der Dichtungen erhöht. Stellen Sie sich das wie das Spannen einer Feder vor – sie wird steifer, bleibt aber dennoch eine Feder und keine starre Verbindung. Darüber hinaus sind die meisten industriellen Pneumatiksysteme aus infrastrukturellen und sicherheitstechnischen Gründen auf einen Versorgungsdruck von 6 bis 8 bar begrenzt. Der bessere Ansatz besteht darin, das Volumen zu minimieren und fortschrittliche Regelungsstrategien zu verwenden, anstatt einfach nur den Druck zu erhöhen.
Wie schneidet die servopneumatische Leistung im Vergleich zur servoelektrischen Leistung bei Positionierungsanwendungen ab?
Servopneumatik erreicht in der Regel eine Regelungsbandbreite von 1–5 Hz und eine Positioniergenauigkeit von ±0,5–2 mm, während Servoelektrik eine Bandbreite von 10–30 Hz und eine Genauigkeit von ±0,01–0,1 mm erreicht – Servopneumatik kostet jedoch 40–60% weniger, bietet eine inhärente Nachgiebigkeit für eine sichere Interaktion mit Menschen und verfügt über einen einfacheren Überlastschutz. Für Anwendungen, die eine Genauigkeit im Submillimeterbereich oder eine hohe Bandbreite erfordern, ist die servoelektrische Technologie überlegen. Für Anwendungen, bei denen eine Genauigkeit von ±1 mm und eine moderate Geschwindigkeit ausreichend sind, bietet die optimierte servopneumatische Technologie einen hervorragenden Mehrwert. Der Schlüssel liegt darin, die Technologie an Ihre tatsächlichen Anforderungen anzupassen und nicht zu überdimensionieren. 🎯
Kann ich vorhandene Pneumatikzylinder mit einer Servosteuerung nachrüsten?
Sie können vorhandene Zylinder mit einer Servosteuerung ausstatten, jedoch wird die Leistung durch das Totvolumen, die Reibungseigenschaften und die Fertigungstoleranzen des Zylinders eingeschränkt sein. In der Regel werden nur 50 bis 70 % der Leistung erreicht, die mit für Servoanwendungen entwickelten Zylindern möglich wäre. Wenn Sie eine Nachrüstung vornehmen, konzentrieren Sie sich darauf, das externe Totvolumen zu minimieren (kurze Schläuche, kompakte Verteiler), Gain Scheduling zur Bewältigung positionsabhängiger Dynamiken zu implementieren und wenn möglich Druckrückkopplung zu verwenden. Wenn Sie jedoch ein neues System entwerfen, sparen Sie durch die Spezifizierung servooptimierter Zylinder wie der stangenlosen Serie von Bepto von Anfang an erheblich an Entwicklungszeit und erzielen bessere Ergebnisse.
Welche Abtastrate benötige ich für eine effektive servopneumatische Steuerung?
Die grundlegende Positionssteuerung erfordert eine Abtastrate von 100 bis 200 Hz, während fortschrittliche Strategien mit Druckrückmeldung 500 bis 1000 Hz erfordern, um die schnelle pneumatische Dynamik effektiv zu steuern und eine optimale Leistung zu erzielen. Die äußere Positionsregelung kann langsamer laufen (100–200 Hz), aber wenn Sie eine Druckrückmeldung (Kaskadenregelung) implementieren, muss die innere Druckregelung mit mindestens 500 Hz laufen, um die pneumatische Resonanz zu steuern. Die meisten modernen SPSen und Bewegungssteuerungen können diese Frequenzen problemlos erreichen. Versuchen Sie nicht, eine servopneumatische Steuerung mit einer SPS-Abtastrate von 50 Hz zu implementieren – Sie werden ständig mit Stabilitätsproblemen zu kämpfen haben.
Warum sollte ich mich für Bepto-kolbenstangenlose Zylinder für meine servopneumatische Anwendung entscheiden?
Bepto-Kolbenstangenlose Zylinder bieten eine um 30-40% höhere Eigenfrequenz durch minimiertes Totvolumen, eine um 40% geringere Reibung für eine bessere Modellgenauigkeit und eine präzise Fertigung für gleichbleibende Leistung – und das alles zu 30% geringeren Kosten als OEM-Alternativen, mit einer Lieferzeit von 3-5 Tagen und kostenlosem Support durch Anwendungstechniker. Bei der Implementierung einer servopneumatischen Steuerung hat die Zylinderkonstruktion direkten Einfluss auf die erreichbare Leistung und den erforderlichen technischen Aufwand. Unsere Zylinder sind speziell für Servoanwendungen optimiert und verfügen über detaillierte pneumatische Parameter für eine genaue Modellierung. Darüber hinaus bietet unser technisches Team (einschließlich mir! 👋) kostenlose Beratung zu Steuerungsstrategien, Ventilauslegung und Systemoptimierung. Wir haben Dutzenden von Integratoren dabei geholfen, ihre Leistungsziele schneller und kostengünstiger zu erreichen – lassen Sie uns auch Ihnen helfen! 💪
-
Überprüfen Sie die grundlegende thermodynamische Gleichung, die das Verhältnis zwischen Druck, Volumen und Temperatur in Gasen regelt. ↩
-
Verstehen Sie den thermodynamischen Index, der die Wärmeübertragung während Kompressions- und Expansionsprozessen beschreibt. ↩
-
Entdecken Sie diese lineare parametrische Regelungstechnik, die für Systeme mit sich ändernder Dynamik eingesetzt wird. ↩
-
Erfahren Sie, wie mathematische Funktionen die Beziehung zwischen Eingabe und Ausgabe in linearen zeitinvarianten Systemen darstellen. ↩
-
Entdecken Sie fortschrittliche Regelungsverfahren, die dynamische Prozessmodelle zur Optimierung zukünftiger Regelungsmaßnahmen nutzen. ↩
