

Introducción
¿Le cuesta elegir la estrategia de control adecuada para su aplicación de cilindros neumáticos inteligentes? 🤔 Muchos ingenieros se enfrentan a la confusión a la hora de decidir entre los modos de control de fuerza y control de posición, lo que conduce a un rendimiento subóptimo, daños en los productos o procesos ineficientes. Una elección incorrecta puede suponer la diferencia entre un funcionamiento fluido y costosas averías.
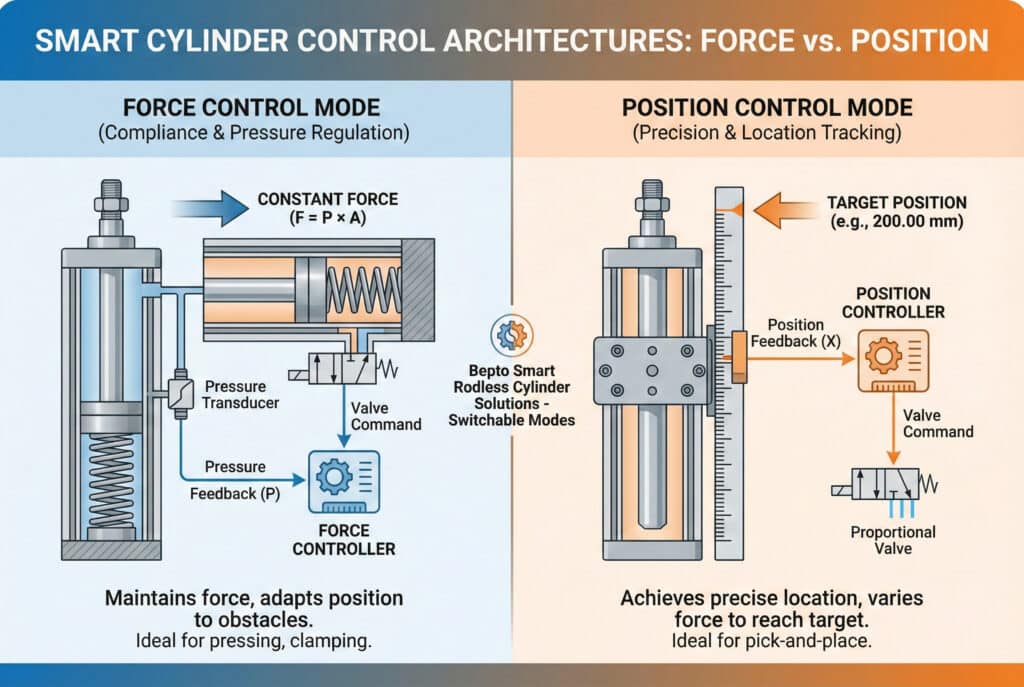
El modo de control de fuerza regula la presión o la fuerza de salida de un cilindro inteligente para mantener una fuerza de empuje/tracción constante independientemente de la posición, lo que resulta ideal para operaciones de prensado, sujeción y montaje. El modo de control de posición se centra en lograr y mantener una ubicación precisa del carro a lo largo de la carrera, lo que resulta perfecto para tareas de recogida y colocación, clasificación y posicionamiento. La elección depende de si su aplicación da prioridad a “la fuerza” (fuerza) o a “la ubicación exacta” (posición) en la que actúa el cilindro.
El mes pasado, consulté con Rachel, ingeniera de procesos en una planta de montaje de automóviles en Cleveland, Ohio. Su equipo utilizaba el control de posición para el proceso de instalación de paneles de puertas, pero estos se agrietaban debido a la aplicación inconsistente de la fuerza. Después de cambiar su cilindro inteligente sin vástago Bepto al modo de control de fuerza con retroalimentación de presión, las tasas de defectos se redujeron de 8% a menos de 0,5%. Comprender cuándo utilizar cada modo es fundamental para el éxito de la aplicación. 💡
Índice
- ¿Cuál es la diferencia fundamental entre el control de fuerza y el control de posición?
- ¿Cuándo se debe utilizar el modo de control de fuerza en aplicaciones neumáticas?
- ¿Cuándo es mejor elegir el modo de control de posición?
- ¿Se pueden combinar ambos modos de control en aplicaciones híbridas?
¿Cuál es la diferencia fundamental entre el control de fuerza y el control de posición?
Comprender la diferencia fundamental entre estas filosofías de control es esencial para una ingeniería de aplicaciones adecuada. ⚙️
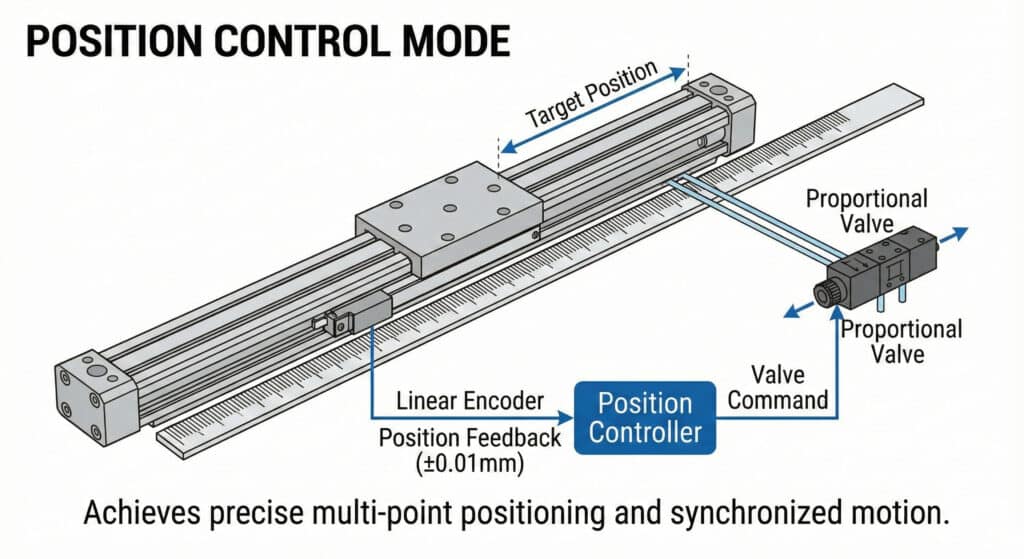
El modo de control de fuerza utiliza sensores de presión o monitorización de corriente para regular la fuerza de salida del cilindro, manteniendo una fuerza de empuje/tracción constante incluso cuando cambia la posición o se encuentran obstáculos. El modo de control de posición utiliza codificadores lineales1 o sensores magnéticos para rastrear y controlar la ubicación del carro con una precisión típica de entre 0,01 y 0,5 mm, dando prioridad al posicionamiento preciso sobre la consistencia de la fuerza. Cada modo optimiza diferentes parámetros de rendimiento en función de los requisitos de la aplicación.
Fundamentos del bucle de control
Arquitectura de control de fuerza
En el modo de control de fuerza, el sistema supervisa continuamente:
- Sensores de presión: Medir la presión de la cámara en tiempo real.
- Cálculo de la fuerza: F = P × A (presión × área del pistón)
- Bucle de retroalimentación: Ajusta la posición de la válvula para mantener la fuerza objetivo.
- Conformidad: La posición del cilindro varía en función de las características de la pieza de trabajo.
Al controlador no le importa dónde se encuentre el cilindro, solo que aplique la fuerza correcta.
Arquitectura de control de posición
Los sistemas de control de posición se centran en la ubicación:
- Codificador lineal: Rastrea la posición absoluta o incremental.
- Error de posición: Calcula la diferencia con respecto al objetivo.
- Perfil de velocidad: Controla la aceleración y la desaceleración.
- Variación de la fuerza: La fuerza de salida cambia en función de la carga y la fricción.
Comparación clave del rendimiento
| Característica | Control de la fuerza | Control de posición |
|---|---|---|
| Comentarios primarios | Presión/Fuerza | Posición/Ubicación |
| Precisión típica | ±2-5% de fuerza objetivo | ±0,01-0,5 mm |
| Respuesta a los obstáculos | Mantiene la fuerza, deja de moverse. | Aumenta la fuerza para alcanzar la posición. |
| Lo mejor para el cumplimiento normativo | Excelente | Pobre |
| Repetibilidad | Fuerza: Excelente / Posición: Variable | Posición: Excelente / Fuerza: Variable |
| Coste del sistema | Moderado | Moderado-alto |
En Bepto, ofrecemos soluciones inteligentes de cilindros sin vástago con ambos modos de control, lo que permite a los ingenieros seleccionar la estrategia óptima para su aplicación específica. Nuestros sistemas pueden incluso cambiar entre modos durante diferentes fases del mismo ciclo. 🔄
Requisitos de los sensores
Necesidades de control de fuerza:
- Transductores de presión (rango típico de 0 a 10 bar)
- Válvulas proporcionales o servoválvulas2 para una regulación precisa de la presión
- Bucles de control rápido (tiempo de ciclo de 1-5 ms)
Necesidades de control de posición:
- Sensores de posición lineal (magnéticos, ópticos o magnetoestrictivos)
- Retroalimentación de alta resolución (0,01-0,1 mm)
- Perfiles de movimiento predictivos para una aceleración suave
¿Cuándo se debe utilizar el modo de control de fuerza en aplicaciones neumáticas?
Ciertas aplicaciones requieren absolutamente un control de la fuerza para garantizar la calidad y la seguridad. 🛡️
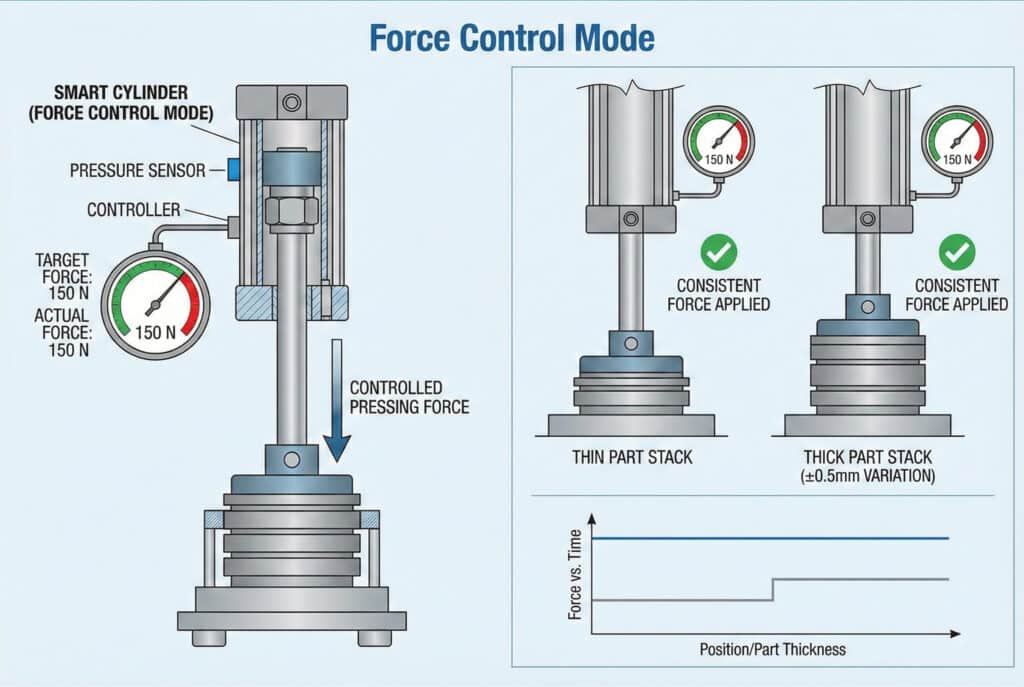
El modo de control de fuerza destaca en aplicaciones que requieren: una fuerza de presión constante independientemente de la variación del grosor de la pieza (tolerancia de ±0,5 mm), operaciones de montaje compatibles en las que una fuerza excesiva causa daños, pruebas de control de calidad que miden curvas fuerza-desplazamiento3, manipulación suave de productos delicados y procesos adaptables en los que varían las propiedades de las piezas de trabajo. Cualquier aplicación en la que “la fuerza” sea más importante que “la ubicación exacta” se beneficia del control de la fuerza.
Aplicaciones ideales para el control de fuerza
Operaciones de montaje y prensado
Montaje a presión: La inserción de cojinetes, casquillos o conectores requiere una fuerza controlada para evitar daños. El control de la fuerza garantiza una inserción uniforme sin ejercer una presión excesiva.
Montaje a presiónLos componentes plásticos necesitan una fuerza precisa para encajar los clips sin romperse. El control de la fuerza proporciona la “sensación” que evita defectos.
Presión de dispensación del adhesivo: Mantener una fuerza constante en los pistones dispensadores garantiza un flujo uniforme del material, independientemente de los cambios de viscosidad.
Historia real de éxito
Thomas, director de producción de una fábrica de productos electrónicos de consumo en San José, California, estaba experimentando índices de fallo de 12% en un proceso de montaje de componentes para teléfonos inteligentes. Sus cilindros con control de posición impulsaban los componentes a una profundidad fija, pero las variaciones en el grosor de los componentes hacían que algunas piezas recibieran una fuerza insuficiente, mientras que otras se agrietaban por una fuerza excesiva. Tras cambiar a cilindros sin vástago con control de fuerza Bepto ajustados a 150 N, su proceso se adaptó automáticamente a las variaciones de las piezas: los defectos se redujeron a 0,81 TP3T y el tiempo de ciclo mejoró en 0,2 segundos. 📱
Ventajas del control de fuerza
- Adaptable a la variación: Compensa automáticamente la pieza. acumulación de tolerancias4
- Evita daños: Deja de aumentar la fuerza cuando se alcanza el objetivo.
- Comentarios sobre la calidadLos datos de fuerza proporcionan capacidad de supervisión de procesos.
- Manipulación suave: Ideal para materiales frágiles (vidrio, cerámica, productos electrónicos)
Categorías de aplicaciones
| Industria | Aplicación típica | Rango de fuerza objetivo | Beneficio clave |
|---|---|---|---|
| Automoción | Instalación de burletes | 50-200 N | Sellado uniforme sin daños |
| Electrónica | Inserción de componentes PCB | 10-80 N | Evita el agrietamiento de la tabla. |
| Embalaje | Sellado de cajas de cartón | 100-400 N | Se adapta a las variaciones del nivel de llenado. |
| Productos sanitarios | Conjunto de catéter | 5-30 N | Garantiza la integridad sin deformación. |
| Procesado de alimentos | Prensado/conformado de productos | 50-500 N | Control uniforme de la densidad |
¿Cuándo es mejor elegir el modo de control de posición?
El control de posición predomina en aplicaciones donde la precisión de la ubicación es fundamental. 🎯
El modo de control de posición es esencial cuando: se requiere una precisión de posicionamiento absoluta dentro de ±0,1 mm, se necesitan múltiples posiciones de parada a lo largo de la carrera, es fundamental el movimiento sincronizado con otros ejes, los movimientos punto a punto a alta velocidad exigen perfiles de velocidad optimizados, o la aplicación implica recoger, colocar, clasificar o transferir material con precisión. Los procesos de fabricación que requieren ubicaciones repetibles independientemente de las variaciones de carga se benefician al máximo del control de posición.
Áreas de excelencia en control de posición
Operaciones de recogida y colocación
El montaje robótico y la manipulación de materiales requieren que los cilindros se desplacen repetidamente a ubicaciones exactas:
- Topes multiposición: Un cilindro sirve a varias estaciones a lo largo de su recorrido.
- Movimiento sincronizado: Coordina con transportadores, robots u otros ejes.
- Precisión a alta velocidad: Mantiene la precisión incluso a velocidades superiores a 2 m/s.
Aplicaciones de posicionamiento de precisión
Carga de máquinas herramienta CNCLas piezas deben alinearse con una precisión de 0,05 mm para garantizar la precisión del mecanizado.
Conjunto ópticoEl posicionamiento de la lente requiere una repetibilidad inferior a 0,1 mm para garantizar la calidad del enfoque.
Sistemas de inspecciónEl posicionamiento de la cámara requiere una ubicación constante para el análisis de imágenes.
Optimización del perfil de movimiento
El control de posición permite estrategias de movimiento sofisticadas:
- Aceleración en curva en S5: El arranque y la parada suaves reducen los golpes mecánicos.
- Mezcla de velocidades: Transiciones entre movimientos sin detenerse.
- Engranaje electrónico: Se sincroniza matemáticamente con el eje maestro.
- Cizalla voladora: Se adapta a la velocidad de desplazamiento de la banda durante el corte.
Ventajas del control de posición
- Precisión absoluta: Alcanza el objetivo con una precisión de micras.
- Capacidad multipunto: Paradas ilimitadas a lo largo de la longitud de carrera
- Calendario previsible: Consistencia del tiempo de ciclo para la planificación del rendimiento
- Sincronización: Coordina movimientos complejos de múltiples ejes.
Especificaciones típicas
Los modernos cilindros inteligentes sin vástago con control de posición ofrecen:
- Precisión de posicionamiento: ±0,05 mm a ±0,5 mm, dependiendo del sensor.
- Repetibilidad: ±0,01 mm para sistemas magnetoestrictivos
- Velocidad máxima: 2-3 m/s con desaceleración controlada
- Resolución: 0,01 mm o mejor con codificadores de alta gama.
Nuestros cilindros sin vástago con control de posición Bepto ofrecen un rendimiento equivalente al de los fabricantes de equipos originales a un coste significativamente menor, con total compatibilidad para la sustitución directa de las principales marcas. Hemos ayudado a docenas de instalaciones a actualizar sus sistemas obsoletos, reduciendo al mismo tiempo los costes de inventario de piezas de repuesto en un 35%. 💰
¿Se pueden combinar ambos modos de control en aplicaciones híbridas?
Las aplicaciones avanzadas suelen requerir el cambio entre modos de control durante las diferentes fases del ciclo. 🔀
El control híbrido de fuerza y posición permite a los cilindros inteligentes utilizar el control de posición para movimientos de aproximación rápidos, luego cambiar al control de fuerza para la operación de trabajo real y volver al control de posición para la retracción. Esta combinación ofrece un tiempo de ciclo óptimo (posicionamiento rápido) con garantía de calidad (aplicación de fuerza controlada). La implementación requiere cilindros con sensores de presión y posición, además de controladores capaces de cambiar de modo en un intervalo de 10 a 50 ms.

Estrategias de control híbridas
Cambio de modo secuencial
Fase 1: Aproximación rápida (control de posición):
- Muévete rápidamente a una posición cercana al contacto.
- Alta velocidad (1,5-2 m/s) para optimizar el tiempo de ciclo.
- Deténgase 2-5 mm antes de entrar en contacto con la pieza de trabajo.
Fase 2 – Operación de trabajo (control de fuerza):
- Cambiar al modo de control forzado
- Aplicar una fuerza de prensado/ensamblaje controlada.
- Supervisar la curva fuerza-desplazamiento para garantizar la calidad.
Fase 3: Retracción (control de posición):
- Volver a la posición inicial o intermedia.
- Perfil de velocidad optimizado para el próximo ciclo
Aplicación híbrida del mundo real
Un fabricante de dispositivos médicos de Minneapolis, Minnesota, utiliza esta misma estrategia para el montaje de puntas de catéteres. El cilindro inteligente Bepto se posiciona rápidamente (modo de posicionamiento) en la estación de montaje en 0,4 segundos, cambia al modo de fuerza para aplicar con precisión 18 N para fijar térmicamente la punta (0,6 segundos) y, a continuación, se retrae bajo control de posición (0,3 segundos). Tiempo total del ciclo: 1,3 segundos sin defectos en más de 2 millones de ciclos. 🏥
Requisitos de implementación
| Componente | Especificación | Propósito |
|---|---|---|
| Sensores duales | Presión + Posición | Habilitar ambos modos de control |
| Controlador rápido | Cambio de modo en menos de 10 ms | Transición fluida |
| Válvula servo/proporcional | Respuesta de alta frecuencia | Admite ambos tipos de control. |
| Software avanzado | Lógica de la máquina de estados | Gestiona las transiciones de modo. |
Ventajas del enfoque híbrido
- Tiempo de ciclo optimizado: Movimientos rápidos en los que la precisión no es fundamental.
- Garantía de calidad: Fuerza controlada donde importa.
- Supervisión de procesos: Datos registrados tanto de posición como de fuerza.
- Flexibilidad: Adaptarse automáticamente a las variaciones del producto.
Marco de decisión
Utilice el control de fuerza cuando:
- El grosor/altura de la pieza varía >0,5 mm.
- Las propiedades del material son inconsistentes.
- Es posible que se produzcan daños por el uso excesivo de la fuerza.
- La calidad del proceso depende de la aplicación de la fuerza.
Utilice el control de posición cuando:
- La precisión absoluta de la ubicación es fundamental.
- Se requieren múltiples posiciones de parada.
- Es necesaria la sincronización con otros equipos.
- La optimización del tiempo de ciclo exige una alta velocidad.
Utilice el control híbrido cuando:
- La aplicación tiene fases de posicionamiento y trabajo diferenciadas.
- Tanto la velocidad como la calidad son fundamentales.
- La supervisión del proceso requiere datos tanto de fuerza como de posición.
- El presupuesto permite sistemas avanzados de cilindros inteligentes.
Conclusión
La elección entre los modos de control de fuerza y control de posición, o la implementación de estrategias híbridas, repercute directamente en la calidad del producto, la eficiencia del ciclo y la capacidad del proceso, lo que convierte esta decisión fundamental en una de las más importantes en el diseño de sistemas neumáticos para la fabricación moderna. 🚀
Preguntas frecuentes sobre los modos de control del cilindro inteligente
P: ¿Puedo modernizar mis cilindros actuales para añadir control de fuerza o posición?
La modernización depende del diseño actual de su cilindro. Los cilindros estándar se pueden actualizar con sensores de posición externos (bandas magnéticas, encoders de cable) para el control de la posición, pero el control de la fuerza requiere transductores de presión en los puertos del cilindro, además de un control de válvula proporcional. Los costes totales de la modernización suelen oscilar entre el 60 y el 80 % del precio de un cilindro inteligente nuevo, por lo que a menudo resulta más económico sustituirlo. Bepto ofrece sustituciones rentables de cilindros inteligentes sin vástago compatibles con las principales interfaces de montaje OEM.
P: ¿En qué medida depende la precisión del control de la fuerza de la estabilidad de la presión del aire?
La precisión del control de fuerza es directamente proporcional a la estabilidad de la presión de suministro, ya que F = P × A. Una fluctuación de presión de ±0,2 bar a un suministro de 6 bar provoca una variación de fuerza de ±3,31 TP3T. Para aplicaciones críticas que requieren una precisión de fuerza de ±11 TP3T, utilice reguladores de presión con una estabilidad de ±0,05 bar y considere el control de presión de bucle cerrado. El control de posición es menos sensible a las variaciones de presión, ya que ajusta la posición de la válvula para alcanzar la ubicación deseada independientemente de la presión.
P: ¿Qué tiempo de respuesta puedo esperar al cambiar entre los modos de control?
Los controladores de cilindros inteligentes modernos cambian de modo en 10-50 ms, dependiendo de la arquitectura del sistema. La respuesta física real (cambio en el movimiento del cilindro) tarda entre 20 y 100 ms adicionales, según el tiempo de respuesta de la válvula y la dinámica del sistema neumático. Para aplicaciones que requieren cambios de modo frecuentes (más de 5 veces por segundo), asegúrese de que su controlador y sus válvulas estén clasificados para un funcionamiento de alta frecuencia a fin de evitar una disminución del rendimiento.
P: ¿Los cilindros controlados por fuerza consumen más aire que los controlados por posición?
El control de fuerza suele consumir entre 10 y 201 TP3T más de aire, ya que modula continuamente la presión para mantener la fuerza objetivo, mientras que el control de posición utiliza la presión máxima para los movimientos y luego mantiene la posición con un flujo mínimo. Sin embargo, el control de fuerza evita el desperdicio de energía por exceso de presión, lo que puede compensar esta diferencia. El consumo real depende en gran medida del ciclo de trabajo de la aplicación. Consulte a nuestro equipo de ingeniería de Bepto para obtener cálculos específicos basados en los parámetros de su proceso.
P: ¿Puede un cilindro inteligente controlar tanto la fuerza de tracción (tirar) como la fuerza de compresión (empujar)?
Sí, los cilindros inteligentes avanzados con sensores de presión en ambas cámaras pueden controlar la fuerza en ambas direcciones. Esto requiere transductores de presión duales y el cálculo de la fuerza bidireccional (F = P₁×A₁ – P₂×A₂, teniendo en cuenta las diferencias en el área de la varilla). Aplicaciones como las pruebas de materiales, el control de la tensión de la banda y el montaje bidireccional se benefician de esta capacidad. Las implementaciones estándar suelen controlar la fuerza en una sola dirección (normalmente empujando) para reducir el coste y la complejidad.
-
Una guía que explica cómo los codificadores lineales convierten el movimiento mecánico en señales eléctricas para un posicionamiento preciso. ↩
-
Descripción general de cómo las válvulas proporcionales y servoválvulas regulan el caudal y la presión en los sistemas de potencia hidráulica. ↩
-
Recurso técnico sobre la interpretación de curvas de fuerza-desplazamiento para analizar las propiedades de los materiales y sus comportamientos mecánicos. ↩
-
Guía de ingeniería sobre el análisis de la acumulación de tolerancias y su impacto en el ajuste y el funcionamiento del ensamblaje. ↩
-
Una comparación de perfiles de movimiento que explica cómo la aceleración en curva S reduce la vibración mecánica y las sacudidas. ↩
