

Wprowadzenie
Czy Twój system wielocylindrowy boryka się z błędami synchronizacji, które powodują zacięcia, uszkodzenia produktów lub zagrożenia bezpieczeństwa? 😰 Gdy dwa lub więcej cylindrów pneumatycznych musi poruszać się razem — podnosząc ciężkie ładunki, prowadząc szerokie panele lub koordynując złożone ruchy — nawet niewielkie różnice w położeniu powodują poważne problemy. Tradycyjne systemy pneumatyczne z otwartą pętlą po prostu nie są w stanie utrzymać ścisłej synchronizacji wymaganej przez nowoczesną produkcję.
Strategie sterowania z podwójną pętlą wykorzystują dwie zagnieżdżone pętle sprzężenia zwrotnego do synchronizacji wielu cylindrów pneumatycznych: wewnętrzną pętlę prędkości, która kontroluje prędkość poszczególnych cylindrów poprzez proporcjonalną modulację zaworu, oraz zewnętrzną pętlę położenia, która porównuje położenia cylindrów i dostosowuje wartości zadane prędkości w celu zminimalizowania błędu synchronizacji. Architektura ta zazwyczaj osiąga dokładność synchronizacji od ±0,5 mm do ±2 mm przy długościach skoku do 3 metrów, w porównaniu z ±10-50 mm w przypadku podstawowych systemów pneumatycznych.
W ostatnim kwartale współpracowałem ze Stevenem, inżynierem mechanikiem w fabryce paneli słonecznych w Phoenix w Arizonie. Jego dwucylindrowy system bramowy do obsługi 2-metrowych paneli szklanych miał 15 mm błędy synchronizacji, które powodowały pękanie paneli, co kosztowało $8 000 miesięcznie. Po wdrożeniu sterowania dwupętlowego w jego systemie cylindrów beztłoczyskowych Bepto synchronizacja poprawiła się do ±1,2 mm, liczba pęknięć spadła niemal do zera, a wydajność wzrosła o 12% dzięki szybszym, bezpiecznym prędkościom roboczym. Wyjaśnię, jak działa ta potężna strategia sterowania. 🎯
Spis treści
- Czym są strategie sterowania z podwójną pętlą i dlaczego są potrzebne?
- W jaki sposób wewnętrzna pętla prędkości kontroluje prędkość poszczególnych cylindrów?
- W jaki sposób pętla pozycji zewnętrznej utrzymuje synchronizację?
- Jakie są wymagania dotyczące wdrożenia i najlepsze praktyki?
Czym są strategie sterowania z podwójną pętlą i dlaczego są potrzebne?
Zrozumienie wyzwania związanego z synchronizacją wyjaśnia, dlaczego zaawansowana kontrola jest niezbędna. ⚙️
Sterowanie dwupętlowe rozwiązuje podstawowy problem polegający na tym, że siłowniki pneumatyczne naturalnie działają z różnymi prędkościami z powodu zmian tarcia, nierównowagi obciążenia, różnic ciśnienia zasilania i ściśliwość powietrza1. Architektura z podwójną pętlą oddziela kontrolę prędkości (pętla wewnętrzna działająca z częstotliwością 100–500 Hz) od synchronizacji położenia (pętla zewnętrzna działająca z częstotliwością 10–50 Hz), umożliwiając szybką reakcję na zakłócenia przy jednoczesnym zachowaniu skoordynowanego ruchu. To hierarchiczne podejście przewyższa systemy z pojedynczą pętlą pod względem dokładności synchronizacji o 5–10 razy.

Wyzwanie synchronizacji
Dlaczego cylindry pneumatyczne nie synchronizują się naturalnie
Nawet “identyczne” butle wykazują różne zachowanie z powodu:
- Zmiana tarcia: Zużycie uszczelki, różnice w smarowaniu (zmiana siły ±10-30%)
- Nierównowaga obciążenia: Przesunięcie środka ciężkości, nierównomierny rozkład ciężaru
- Różnice ciśnienia zasilania: Nierówne długości linii, ograniczenia przepływu
- Ściśliwość powietrza: Wpływ temperatury i wilgotności na gęstość powietrza
- Tolerancje produkcyjneŚrednica otworu, wymiary uszczelki (typowo ±0,05 mm)
Czynniki te powodują różnice prędkości między cylindrami wynoszące od 5 do 201 TP3T, co skutkuje błędami położenia, które kumulują się na całej długości skoku.
Architektura jednopętlowa a architektura dwupętlowa
| Architektura sterowania | Dokładność synchronizacji | Czas reakcji | Złożoność | Koszt |
|---|---|---|---|---|
| Pętla otwarta (bez sprzężenia zwrotnego) | ±10–50 mm | NIE DOTYCZY | Bardzo niski | Bardzo niski |
| Pętla pojedynczej pozycji | ±3-8 mm | 100-300 ms | Niski | Niski |
| Podwójna pętla (prędkość + pozycja) | ±0,5-2 mm | 20-80ms | Umiarkowany | Umiarkowany |
| Potrójna pętla (dodaje siłę) | ±0,2–1 mm | 10-50ms | Wysoki | Wysoki |
Hierarchia pętli sterowania
Pętla zewnętrzna (synchronizacja pozycji):
- Porównuje pozycje wszystkich cylindrów
- Oblicza błąd synchronizacji
- Reguluje wartości zadane prędkości dla każdego cylindra
- Częstotliwość aktualizacji: 10–50 Hz (co 20–100 ms)
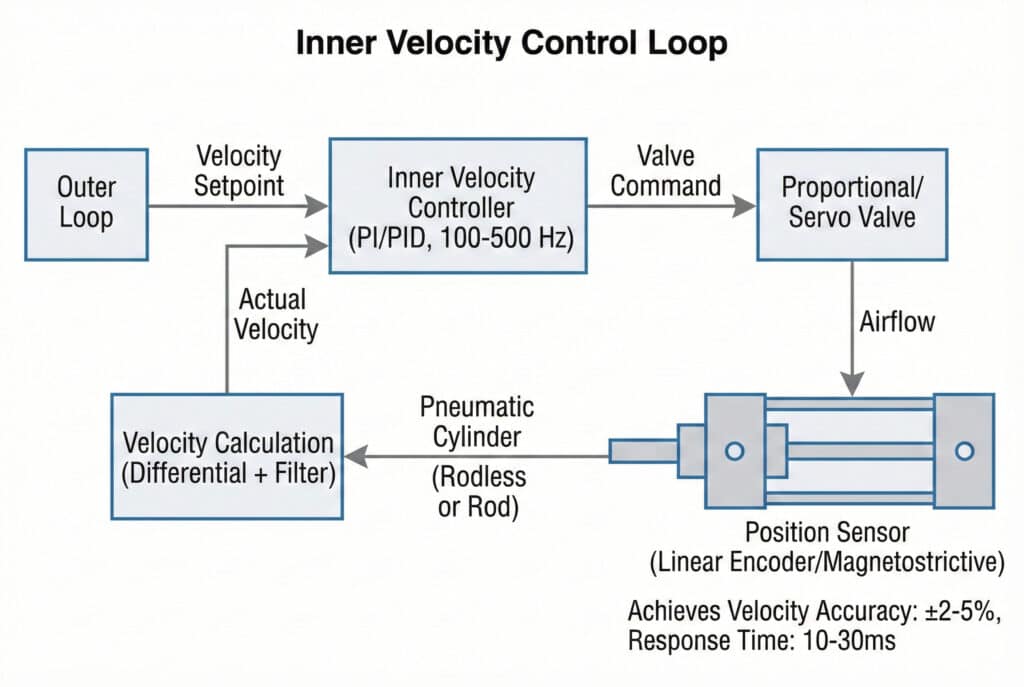
Pętla wewnętrzna (regulacja prędkości):
- Kontroluje prędkość poszczególnych cylindrów
- Moduluje proporcjonalne położenie zaworu
- Reaguje na wartość zadaną prędkości z pętli zewnętrznej
- Częstotliwość aktualizacji: 100–500 Hz (co 2–10 ms)
To rozdzielenie zadań pozwala każdej pętli zoptymalizować swoje konkretne zadanie — szybka pętla wewnętrzna obsługuje dynamiczną reakcję, podczas gdy wolniejsza pętla zewnętrzna utrzymuje koordynację. 🔄
Fundacja Matematyczna
Błąd położenia między cylindrami wynosi:
$$
Sync_{Błąd}
= \left| Położenie_{Cylinder1} – Położenie_{Cylinder2} \right|
$$
Pętla zewnętrzna generuje korekty prędkości:
$$
Prędkość_{Korekta}
= K_{p} × Sync_{Error}
+ K_{d} \times \left( \frac{dError}{dt} \right)
$$
Gdzie K_p jest wzmocnieniem proporcjonalnym, a K_d jest wzmocnieniem różniczkowym (typowe dla regulatora PD).
W firmie Bepto opracowaliśmy wstępnie dostrojone parametry sterowania dla typowych zastosowań synchronizacji, skracając czas uruchomienia z kilku dni do kilku godzin, jednocześnie zapewniając stabilną i dokładną pracę.
W jaki sposób wewnętrzna pętla prędkości kontroluje prędkość poszczególnych cylindrów?
Wewnętrzna pętla zapewnia szybką i precyzyjną kontrolę prędkości, która umożliwia synchronizację. 🚀
Wewnętrzna pętla prędkości wykorzystuje czujnik położenia (enkoder liniowy lub magnetostrykcyjny2) w celu obliczenia prędkości cylindra w czasie rzeczywistym poprzez różniczkowanie numeryczne3, porównuje to z wartością zadaną prędkości z pętli zewnętrznej i reguluje zawór proporcjonalny lub serwo, aby zminimalizować błąd prędkości. Działając z częstotliwością 100–500 Hz z algorytmami sterowania PI lub PID, pętla ta osiąga dokładność prędkości w zakresie ±2–5% i reaguje na zakłócenia w ciągu 10–30 ms, zapewniając stabilną podstawę sterowania prędkością wymaganą do synchronizacji.
Techniki pomiaru prędkości
Bezpośrednie obliczanie prędkości
Większość systemów wyznacza prędkość na podstawie informacji zwrotnej o położeniu:
$$
Prędkość
= \frac{Pozycja_{bieżąca} – Pozycja_{poprzednia}}{Czas_{próbkowania}}
$$
Dla pętli sterowania 100 Hz (czas próbkowania 10 ms):
- Zmiana położenia o 1 mm = prędkość 100 mm/s
- Rozdzielczość czujnika położenia 0,01 mm = rozdzielczość prędkości 1 mm/s
Wymagania dotyczące filtrowania
Obliczenia prędkości surowej są obciążone szumem z powodu:
- Kwantyzacja czujnika położenia
- Wibracje mechaniczne
- Szum elektryczny
Filtrowanie dolnoprzepustowe wygładza sygnał:
- Filtr pierwszego rzędu: prosty, typowa stała czasowa 5–20 ms
- Średnia ruchoma: okno próbkowania 3-10
- Filtr Kalmana: optymalny, ale złożony
Stała czasowa filtra musi być szybsza niż reakcja pętli sterowania (zazwyczaj 1/5 do 1/10 szerokości pasma pętli).
Strategie sterowania zaworami
Proporcjonalna modulacja zaworu
Regulator prędkości wysyła polecenie do zaworu (zazwyczaj 0–10 V lub 4–20 mA):
$$
Zawór_{Polecenie}
= Feedforward + PI_{Korekcja}
$$
Naprzód4 element: W oparciu o pożądaną prędkość i obciążenie (poprawia reakcję)
Korekcja PI: Eliminuje błąd stanu ustalonego
| Typ zaworu | Czas reakcji | Rozdzielczość | Koszt | Najlepsza aplikacja |
|---|---|---|---|---|
| Proporcjonalny kierunkowy | 20-50ms | 8–12 bitów | Średni | Synchronizacja ogólna |
| Serwozawór | 5-15ms | 12–16 bitów | Wysoki | Systemy o wysokiej precyzji |
| Sterowanie cyfrowe PWM | 10–30 ms | 8-10 bitów efektywnych | Niski | Aplikacje wrażliwe na koszty |
Regulacja pętli wewnętrznej
Krok 1: Wzmocnienie proporcjonalne (K_p)
- Zacznij od niskiego wzmocnienia (K_p = 0,1)
- Zwiększać, aż system zacznie reagować szybko i bez oscylacji.
- Typowy zakres: 0,5–2,0 dla regulacji prędkości
Krok 2: Wzmocnienie całkowe (K_i)
- Dodaj działanie integralne, aby wyeliminować błąd stanu ustalonego.
- Zacznij od bardzo niskiej wartości (K_i = 0,01)
- Typowy zakres: 0,05–0,3
Krok 3: Wzrost pochodny (K_d) (opcjonalnie)
- Dodaje tłumienie dla systemów z przekroczeniem wartości zadanej
- Często zbędne w przypadku pneumatycznej regulacji prędkości
- Stosować tylko w razie potrzeby: 0,01–0,1
Wydajność w świecie rzeczywistym
Producent maszyn pakujących z Atlanty w stanie Georgia wdrożył wewnętrzne pętle prędkości na czterech zsynchronizowanych cylindrach beztłoczyskowych Bepto. Przed dostrojeniem prędkość wahała się między cylindrami o ±15%. Po odpowiednim dostrojeniu pętli wewnętrznej:
- Błąd śledzenia prędkości: ±3% wartości zadanej
- Reakcja na zakłócenia obciążenia: 25 ms
- Tętnienie prędkości: <2% (płynny ruch)
- Podstawa synchronizacji: Włączona dokładność pętli zewnętrznej ±1,5 mm ✅
W jaki sposób pętla pozycji zewnętrznej utrzymuje synchronizację?
Pętla zewnętrzna koordynuje pracę wielu cylindrów poprzez regulację ich wartości zadanych prędkości. 🎛️
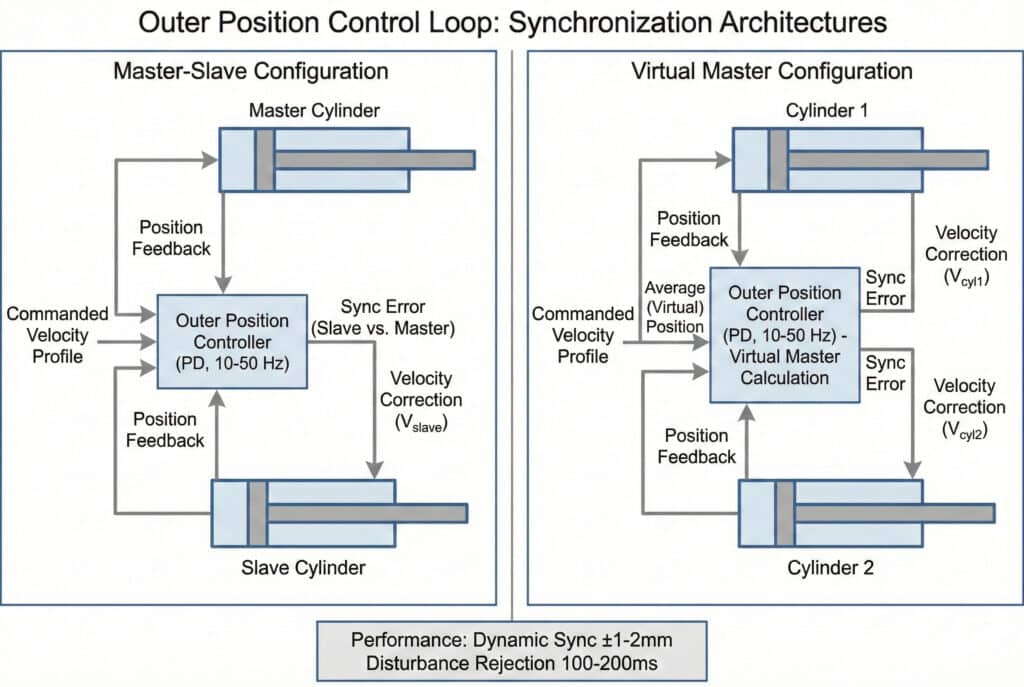
Zewnętrzna pętla położenia realizuje architekturę typu master-slave lub wirtualnego mastera: w sposób ciągły porównuje położenia cylindrów, oblicza błąd synchronizacji dla każdego cylindra slave'a względem cylindra master (lub średniego położenia) i dostosowuje indywidualne wartości zadane prędkości, aby zminimalizować błąd. Pracując z częstotliwością 10–50 Hz z regulacją PD (proporcjonalno-różniczkową), pętla ta generuje korekty prędkości ±10–50%, które przywracają wyrównanie cylindrów w ciągu 50–200 ms po zakłóceniach, utrzymując synchronizację przez cały skok.
Architektury synchronizacji
Konfiguracja typu master-slave
Jeden cylinder oznaczony jako “główny”:
- Master podąża za zadanym profilem prędkości
- Siłowniki podrzędne dostosowują prędkość do pozycji siłownika nadrzędnego.
- Proste, przewidywalne zachowanie
- Wada: Błędy pompy głównej przenoszą się na pompy pomocnicze.
Korekta prędkości dla urządzenia podrzędnego:
$$
V_{slave}
= V_{zadane}
+ K_{p} × (Pos_{master} – Pos_{slave})
+ K_{d} × (Vel_{master} – Vel_{slave})
$$
Konfiguracja wirtualnego urządzenia Master
Średnia pozycja staje się punktem odniesienia:
- Wirtualna_pozycja = (Pozycja_1 + Pozycja_2 + … + Pozycja_n) / n
- Wszystkie cylindry dostosowują się do pozycji wirtualnej
- Zaleta: rozkłada błędy na wszystkie cylindry
- Lepszy dla układów z 3 lub więcej cylindrami
Korekta prędkości dla każdego cylindra:
$$
V_{cylinder_i}
= V_{zadane}
K_{p} × (Pos_{wirtualny} – Pos_{cylinder_i})
$$
Zarządzanie błędami synchronizacji
Limity błędów i nasycenie
Pętla zewnętrzna musi zawierać ograniczenia:
Korekta maksymalnej prędkości: ±30-50% prędkości zadanej
- Zapobiega ucieczce jednego cylindra
- Utrzymuje stabilność systemu
- Zapewnia, że wszystkie cylindry poruszają się do przodu.
Próg błędu dla alarmu: typowo 5–10 mm
- Wywołuje stan błędu w przypadku przekroczenia wartości
- Wskazuje na problem mechaniczny lub awarię sterowania.
- Zapobiega uszkodzeniom sprzętu
Strategie sprzężenia krzyżowego
Zaawansowane systemy wykorzystują sprzężenie krzyżowe między cylindrami:
| Strategia | Opis | Poprawa synchronizacji | Złożoność |
|---|---|---|---|
| Niezależna kontrola | Każdy cylinder sterowany osobno | Linia bazowa | Niski |
| Master-Slave | Niewolnicy podążają za panem | 3-5 razy lepszy | Niski |
| Wirtualny mistrz | Wszystkie śledzą średnią pozycję | 4-6 razy lepszy | Umiarkowany |
| Pełne sprzężenie krzyżowe | Każdy cylinder uwzględnia wszystkie pozostałe | 5-8 razy lepszy | Wysoki |
Dostrajanie pętli zewnętrznej
Wzmocnienie proporcjonalne (K_p):
- Określa, jak agresywnie cylindry korygują błędy synchronizacji.
- Zbyt niski: powolna korekta, duży błąd stanu ustalonego
- Zbyt wysokie: oscylacje, walka między cylindrami
- Typowy zakres: 0,5–2,0 (bezwymiarowy)
Zysk pochodny (K_d):
- Zapewnia tłumienie w oparciu o różnicę prędkości
- Zapobiega przekroczeniu wartości docelowej podczas korygowania błędów
- Typowy zakres: 0,1–0,5
Procedura strojenia:
- Ustaw K_d = 0, K_p = 0,5
- Wprowadź przesunięcie położenia o 5 mm między cylindrami.
- Zwiększ K_p, aż korekcja będzie szybka i bez oscylacji.
- W razie potrzeby dodaj K_d, aby zmniejszyć przekroczenie wartości docelowej.
Wskaźniki wydajności
Dobrze dostrojone systemy z podwójną pętlą zapewniają:
- Synchronizacja statyczna: ±0,5–1 mm w stanie spoczynku
- Synchronizacja dynamiczna: ±1-2 mm podczas ruchu
- Odrzucanie zakłóceń: Powrót do synchronizacji w ciągu 100–200 ms
- Śledzenie prędkości: ±3-5% między cylindrami
Nasze zsynchronizowane systemy Bepto z podwójną pętlą zostały wdrożone w ponad 150 instalacjach na całym świecie, obsługując obciążenia od 50 kg do 5000 kg przy długości skoku do 4 metrów. 🌍
Jakie są wymagania dotyczące wdrożenia i najlepsze praktyki?
Skuteczna synchronizacja podwójnej pętli wymaga odpowiedniego sprzętu, oprogramowania i uruchomienia. 🛠️
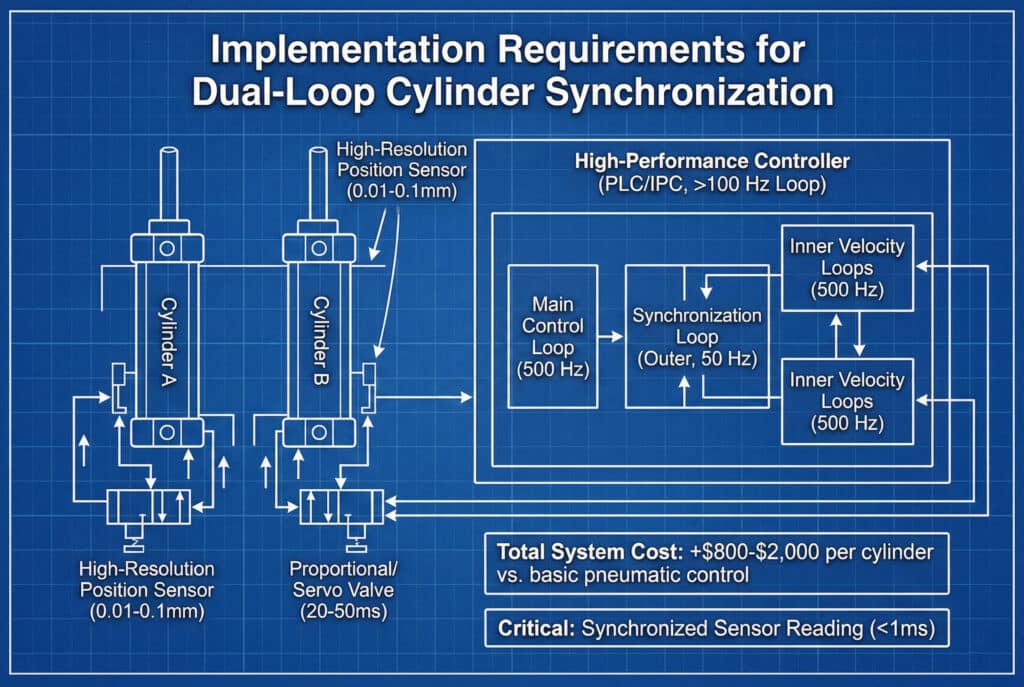
Wdrożenie wymaga: czujników położenia o wysokiej rozdzielczości na każdym cylindrze (rozdzielczość 0,01–0,1 mm), zaworów proporcjonalnych lub serwo dla każdego cylindra (czas reakcji 20–50 ms), sterownika zdolnego do wykonywania pętli 100+ Hz (komputer przemysłowy lub wysokowydajny sterownik PLC), zsynchronizowanego odczytu czujnika (w ciągu 1 ms) oraz odpowiedniej konstrukcji mechanicznej o odpowiedniej sztywności (częstotliwość drgań własnych >20 Hz). Oprogramowanie musi realizować obie pętle sterowania z odpowiednim filtrowaniem, zabezpieczeniem przed zawirowaniem i wykrywaniem usterek. Całkowity koszt systemu wynosi $800-2000 na cylinder w porównaniu z podstawowym sterowaniem pneumatycznym.
Wymagania sprzętowe
Czujniki położenia
| Typ czujnika | Rozdzielczość | Dokładność | Koszt/cylinder | Najlepsze dla |
|---|---|---|---|---|
| Magnetyczny enkoder liniowy | 0,1 mm | ±0,2 mm | $150-300 | Zastosowania ogólne |
| Magnetostrykcja | 0,01 mm | ±0,05 mm | $400-800 | Systemy o wysokiej precyzji |
| Optyczna skala liniowa | 0,001 mm | ±0,01 mm | $600-1,200 | Ultraprecyzyjny (rzadki) |
| Enkoder z drutem | 0,1 mm | ±0,5 mm | $200-400 | Długie pociągnięcia (>2 m) |
Wymóg krytyczny: Wszystkie czujniki muszą być odczytywane synchronicznie (w ciągu 1 ms), aby uniknąć fałszywych błędów synchronizacji.
Wybór zaworu
Zawory proporcjonalne są minimalnym wymaganiem:
- Czas reakcji: <50 ms
- Rozdzielczość: minimum 8 bitów (preferowana 12 bitów)
- Przepustowość: Dopasuj średnicę cylindra do pożądanej prędkości
- Interfejs elektryczny: wejście analogowe 0–10 V lub 4–20 mA
Serwozawory dla wysokiej wydajności:
- Czas reakcji: <20 ms
- Rozdzielczość: 12–16 bitów
- Najwyższa liniowość i powtarzalność
- Wyższy koszt: 2-3× zawory proporcjonalne
Wybór platformy kontrolera
Systemy oparte na sterownikach PLC
Zalety:
- Znane środowisko programistyczne
- Zintegrowany z układem sterowania maszyną
- Solidna konstrukcja przemysłowa
Wymagania:
- Szybkie moduły analogowe wejść/wyjść (100+ Hz)
- Możliwości obliczeniowe zmiennoprzecinkowe
- Wystarczający czas skanowania (<5 ms dla sterowania dwupętlowego)
Odpowiednie sterowniki PLC: Siemens S7-1500, Allen-Bradley ControlLogix, seria Beckhoff CX
Komputer przemysłowy / kontroler ruchu
Zalety:
- Wyższa moc obliczeniowa
- Szybsze częstotliwości pętli (możliwe 1 kHz+)
- Zaawansowane algorytmy łatwiejsze do wdrożenia
Wady:
- Bardziej złożone programowanie
- Może wymagać oddzielnego sterownika PLC bezpieczeństwa
Architektura oprogramowania
Struktura pętli sterowania
Główna pętla sterowania (500 Hz):
1. Odczytaj wszystkie czujniki położenia (zsynchronizowane)
2. Oblicz prędkości (filtrowane różniczkowanie)
Pętla wewnętrzna (na cylinder):
3. Porównaj rzeczywistą prędkość z prędkością zadanej.
4. Oblicz korektę PI
5. Polecenie zaworu wyjściowego
Pętla synchronizacji (50 Hz, co 10 cykli):
6. Oblicz błędy synchronizacji
7. Generowanie korekt prędkości (sterowanie PD)
8. Zaktualizuj wartości zadane prędkości dla pętli wewnętrznych.
9. Sprawdź limity błędów i usterki.
Najważniejsze funkcje oprogramowania
- Przeciwdziałanie nawijaniu5: Zapobiega gromadzeniu się terminów integralnych w sytuacjach granicznych.
- Bezszwowe przenoszenie: Płynne przejścia między trybami (ręcznym/automatycznym)
- Wykrywanie usterek: Monitoruje poprawność działania czujnika, nadmierną liczbę błędów
- Rejestrowanie danych: Rejestruje pozycję, prędkość, błędy do celów diagnostycznych.
- Interfejs strojenia: Umożliwia dostosowanie parametrów bez konieczności ponownej kompilacji.
Najlepsze praktyki w zakresie uruchamiania
Krok 1: Weryfikacja mechaniczna
- Sprawdź sztywność mocowania cylindra
- Sprawdź równowagę obciążenia (w zakresie 10%)
- Zapewnij płynny ruch bez zacinania się
Krok 2: Indywidualna regulacja cylindrów
- Nastaw każdą wewnętrzną pętlę prędkości osobno
- Sprawdź śledzenie prędkości ±5% przed synchronizacją.
Krok 3: Regulacja pętli synchronizacji
- Zacznij od niskich wzmocnień pętli zewnętrznej.
- Stopniowo zwiększaj, monitorując stabilność.
- Test z różnymi obciążeniami i zakłóceniami
Krok 4: Walidacja wydajności
- Przeprowadź ponad 100 cykli pomiaru błędu synchronizacji.
- Sprawdź, czy błąd mieści się w specyfikacji.
- Ostateczne parametry dokumentu
Typowe błędy we wdrażaniu
| Błąd | Konsekwencje | Rozwiązanie |
|---|---|---|
| Niesynchronizowane odczyty czujnika | Błędne błędy synchronizacji | Użyj sprzętowego wyzwalania jednoczesnego próbkowania |
| Niewystarczające filtrowanie | Sygnały prędkości z zakłóceniami | Dodaj odpowiedni filtr dolnoprzepustowy (10–20 ms). |
| Zewnętrzna pętla zbyt szybka | Walka z wewnętrzną pętlą | Pętla zewnętrzna ≤ 1/5 częstotliwości pętli wewnętrznej |
| Brak sprzężenia zwrotnego prędkości | Powolna reakcja | Dodaj sprzężenie wstępne oparte na zadanej prędkości |
| Ignorowanie problemów mechanicznych | Słaba wydajność pomimo dostrojenia | Najpierw napraw wiązanie, brak równowagi lub elastyczność. |
Historia sukcesu w świecie rzeczywistym
Maria, inżynier ds. automatyki w zakładzie przetwórstwa szkła w Toledo w stanie Ohio, przez wiele tygodni zmagała się z problemem synchronizacji trzech cylindrów beztłoczyskowych Bepto obsługujących przenośnik o szerokości 3 metrów. Pomimo intensywnych prób dostrojenia, jej system wykazywał błędy synchronizacji rzędu 8 mm. Po przeanalizowaniu jej implementacji nasz zespół techniczny odkrył, że:
- Odczyty czujników nie były zsynchronizowane (przesunięcie 50 ms)
- Pętla zewnętrzna działała z taką samą prędkością jak pętla wewnętrzna (niestabilność)
- Brak filtrowania prędkości (nadmierny hałas)
Po wdrożeniu naszej zalecanej architektury z zsynchronizowanymi pętlami wewnętrznymi 100 Hz i pętlą zewnętrzną 20 Hz, jej system osiągnął synchronizację ±1,3 mm — spełniając jej specyfikację ±2 mm z zapasem. 🎉
Wnioski
Strategie sterowania z podwójną pętlą przekształcają synchronizację cylindrów pneumatycznych z niepewnego wyzwania w precyzyjny, powtarzalny proces — umożliwiając zastosowania wymagające skoordynowanego ruchu wielu cylindrów, jednocześnie wykorzystując zalety kosztowe i prostotę uruchamiania pneumatycznego w porównaniu z drogimi elektrycznymi systemami serwo. 💪
Często zadawane pytania dotyczące kontroli synchronizacji podwójnej pętli
P: Czy mogę uzyskać dobrą synchronizację tylko za pomocą pętli pozycji (bez pętli prędkości)?
Sterowanie położeniem w pętli pojedynczej pozwala osiągnąć synchronizację na poziomie ±3–8 mm w przypadku systemów poruszających się wolno (<0,5 m/s), ale ma trudności z szybszym ruchem ze względu na opóźnienia pneumatyczne i opóźnienia reakcji zaworów. Wewnętrzna pętla prędkości zapewnia szybką reakcję niezbędną do eliminacji zakłóceń i płynnego ruchu. W zastosowaniach wymagających dokładności lepszej niż ±5 mm lub prędkości powyżej 0,5 m/s zdecydowanie zaleca się sterowanie w pętli podwójnej — poprawa wydajności uzasadnia umiarkowany wzrost złożoności.
P: Ile cylindrów można zsynchronizować za pomocą sterowania dwupętlowego?
Z powodzeniem wdrożyliśmy systemy z 2–6 cylindrami wykorzystujące sterowanie dwupętlowe. Systemy z 2–3 cylindrami są proste; systemy z 4–6 cylindrami wymagają bardziej zaawansowanego sprzężenia krzyżowego i większej mocy obliczeniowej. W przypadku systemów z więcej niż 6 cylindrami należy rozważyć podział na kilka zsynchronizowanych grup. Czynnikami ograniczającymi są moc obliczeniowa sterownika i złożoność mechaniczna utrzymania sztywności w wielu punktach połączeń, a nie sam algorytm sterowania.
P: Co się stanie, jeśli podczas pracy ulegnie awarii jeden czujnik położenia?
Właściwe wykrywanie usterek powinno natychmiast rozpoznawać awarię czujnika (sygnał poza zakresem, niemożliwa prędkość lub zamrożony odczyt) i uruchamiać kontrolowane zatrzymanie wszystkich cylindrów. Niektóre zaawansowane systemy mogą kontynuować pracę w trybie awaryjnym, wykorzystując pozostałe czujniki, ale wymaga to dokładnej analizy bezpieczeństwa. W firmie Bepto zalecamy stosowanie czujników redundantnych w krytycznych zastosowaniach lub wdrożenie czujników różnicy ciśnień jako zapasowej metody wykrywania końca skoku.
P: Czy sterowanie dwupętlowe działa ze standardowymi zaworami dwupozycyjnymi, czy potrzebuję zaworów proporcjonalnych?
Sterowanie dwupętlowe wymaga zaworów proporcjonalnych lub serwo, aby w sposób ciągły modulować prędkość cylindra — standardowe zawory dwustanowe nie zapewniają wymaganej regulacji zmiennego przepływu. Jednak sterowanie PWM (modulacja szerokości impulsu) szybkich zaworów dwustanowych może zbliżyć się do sterowania proporcjonalnego przy 60-80% kosztów. W przypadku zastosowań, w których liczy się budżet, sterowanie PWM z podwójną pętlą zapewnia dobre wyniki (synchronizacja ±2–4 mm), choć nie dorównuje rzeczywistej wydajności zaworów proporcjonalnych (±0,5–2 mm).
P: Jak radzić sobie z nierównomiernym obciążeniem, gdy jeden cylinder przenosi większy ciężar niż pozostałe?
Nierównowaga obciążenia do 20-30% jest automatycznie regulowana przez sterownik z podwójną pętlą — wewnętrzna pętla prędkości dostosowuje położenie zaworu, aby utrzymać równą prędkość pomimo różnych obciążeń. W przypadku większej nierównowagi (>30%) należy rozważyć: mechaniczne wyważanie obciążenia (regulacja punktów mocowania), kompensację wyprzedzającą (dodanie odchylenia zaworu zależnego od obciążenia) lub indywidualną regulację ciśnienia (regulacja ciśnienia zasilania dla każdego cylindra). Nasz zespół inżynierów Bepto może przeanalizować konkretny rozkład obciążenia i zaproponować optymalne rozwiązanie dla danego zastosowania.
-
Właściwość powietrza, która pozwala na zmianę jego objętości wraz ze zmianą ciśnienia, powodując opóźnienia i nieliniowość w układach pneumatycznych. ↩
-
Solidna technologia wykrywania położenia, która wykorzystuje interakcję między polami magnetycznymi a impulsami odkształcenia do pomiaru odległości. ↩
-
Proces obliczeniowy polegający na oszacowaniu prędkości poprzez obliczenie zmiany położenia w określonym przedziale czasu. ↩
-
Proaktywna technika sterowania, która dostosowuje system na podstawie sygnału odniesienia lub zakłóceń, zanim wpłyną one na wynik. ↩
-
Mechanizm, który zapobiega gromadzeniu się nadmiernego błędu przez człon całkujący regulatora PID w przypadku nasycenia siłownika. ↩
