

Introduction
Are you struggling to choose the right control strategy for your smart pneumatic cylinder application? 🤔 Many engineers face confusion when deciding between force control and position control modes, leading to suboptimal performance, product damage, or inefficient processes. The wrong choice can mean the difference between smooth operation and costly failures.
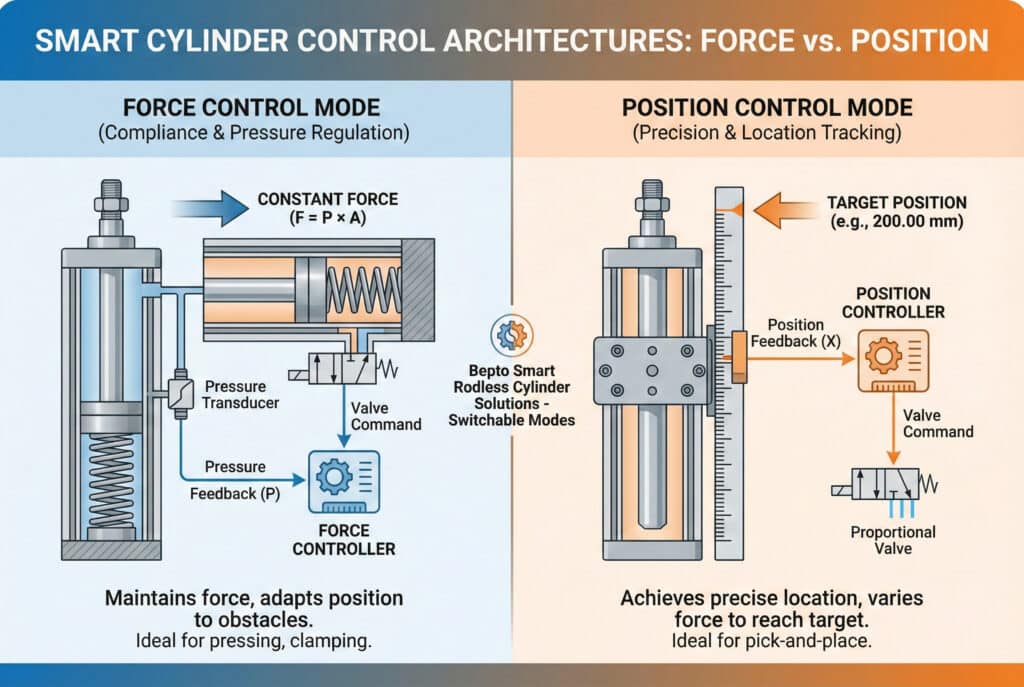
Force control mode regulates the pressure or force output of a smart cylinder to maintain consistent pushing/pulling force regardless of position, ideal for pressing, clamping, and assembly operations. Position control mode focuses on achieving and maintaining precise carriage location along the stroke, perfect for pick-and-place, sorting, and positioning tasks. The choice depends on whether your application prioritizes “how hard” (force) or “where exactly” (position) the cylinder acts.
Last month, I consulted with Rachel, a process engineer at an automotive assembly plant in Cleveland, Ohio. Her team was using position control for a door panel installation process, but panels were cracking due to inconsistent force application. After we switched her Bepto smart rodless cylinder to force control mode with pressure feedback, defect rates dropped from 8% to less than 0.5%. Understanding when to use each mode is critical for application success. 💡
Table of Contents
- What Is the Fundamental Difference Between Force and Position Control?
- When Should You Use Force Control Mode in Pneumatic Applications?
- When Is Position Control Mode the Better Choice?
- Can You Combine Both Control Modes in Hybrid Applications?
What Is the Fundamental Difference Between Force and Position Control?
Understanding the core distinction between these control philosophies is essential for proper application engineering. ⚙️
Force control mode uses pressure sensors or current monitoring to regulate cylinder output force, maintaining constant pushing/pulling force even as position changes or obstacles are encountered. Position control mode uses linear encoders1 or magnetic sensors to track and control carriage location with precision typically between 0.01-0.5mm, prioritizing accurate positioning over force consistency. Each mode optimizes different performance parameters based on application requirements.
Control Loop Fundamentals
Force Control Architecture
In force control mode, the system continuously monitors:
- Pressure sensors: Measure chamber pressure in real-time
- Force calculation: F = P × A (pressure × piston area)
- Feedback loop: Adjusts valve position to maintain target force
- Compliance: Cylinder position varies based on workpiece characteristics
The controller doesn’t care where the cylinder is—only that it’s applying the correct force.
Position Control Architecture
Position control systems focus on location:
- Linear encoder: Tracks absolute or incremental position
- Position error: Calculates difference from target
- Velocity profiling: Controls acceleration and deceleration
- Force variation: Output force changes based on load and friction
Key Performance Comparison
| Characteristic | Force Control | Position Control |
|---|---|---|
| Primary Feedback | Pressure/Force | Position/Location |
| Typical Accuracy | ±2-5% of target force | ±0.01-0.5mm |
| Response to Obstacles | Maintains force, stops moving | Increases force to reach position |
| Best for Compliance | Excellent | Poor |
| Repeatability | Force: Excellent / Position: Variable | Position: Excellent / Force: Variable |
| System Cost | Moderate | Moderate-High |
At Bepto, we offer smart rodless cylinder solutions with both control modes, allowing engineers to select the optimal strategy for their specific application. Our systems can even switch between modes during different phases of the same cycle. 🔄
Sensor Requirements
Force Control Needs:
- Pressure transducers (0-10 bar range typical)
- Proportional or servo valves2 for precise pressure regulation
- Fast control loops (1-5ms cycle time)
Position Control Needs:
- Linear position sensors (magnetic, optical, or magnetostrictive)
- High-resolution feedback (0.01-0.1mm)
- Predictive motion profiles for smooth acceleration
When Should You Use Force Control Mode in Pneumatic Applications?
Certain applications absolutely require force control for quality and safety. 🛡️
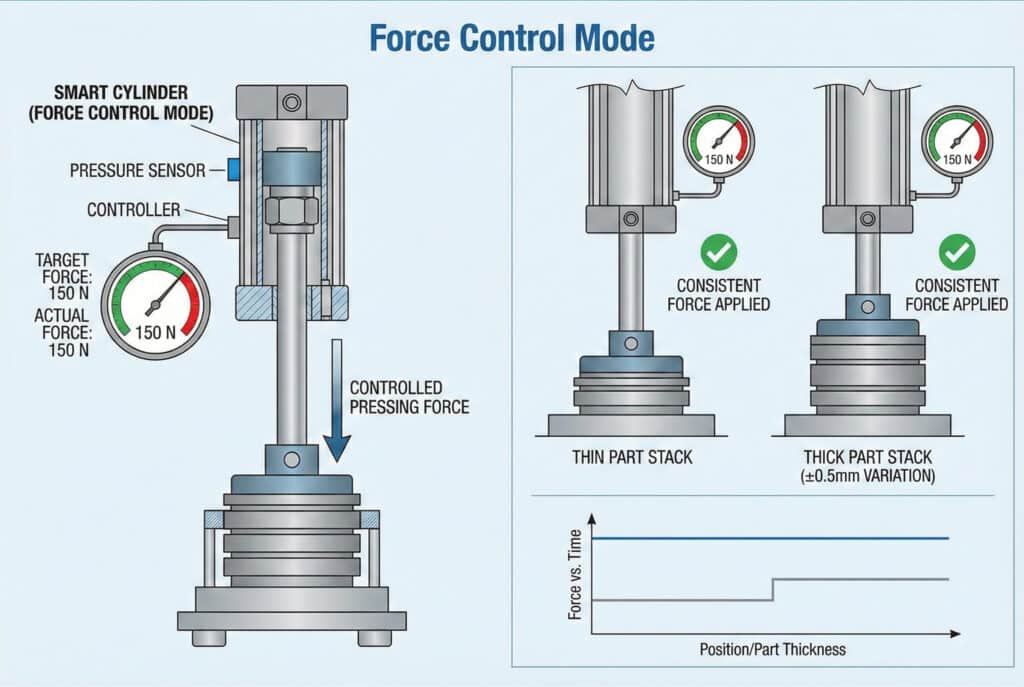
Force control mode excels in applications requiring: consistent pressing force regardless of part thickness variation (±0.5mm tolerance), compliant assembly operations where excessive force causes damage, quality assurance testing that measures force-displacement curves3, soft-touch material handling of delicate products, and adaptive processes where workpiece properties vary. Any application where “how hard” matters more than “exactly where” benefits from force control.
Ideal Force Control Applications
Assembly and Pressing Operations
Press-fit assembly: Inserting bearings, bushings, or connectors requires controlled force to avoid damage. Force control ensures consistent insertion without over-pressing.
Snap-fit assembly: Plastic components need precise force to engage clips without breaking. Force control provides the “feel” that prevents defects.
Adhesive dispensing pressure: Maintaining consistent force on dispensing pistons ensures uniform material flow regardless of viscosity changes.
Real-World Success Story
Thomas, a production manager at a consumer electronics facility in San Jose, California, was experiencing 12% failure rates on a smartphone component assembly process. His position-controlled cylinders were driving components to a fixed depth, but component thickness variations meant some parts received insufficient force while others cracked from excessive force. After switching to Bepto force-controlled rodless cylinders set to 150N, his process adapted automatically to part variations—defects dropped to 0.8% and cycle time actually improved by 0.2 seconds. 📱
Force Control Advantages
- Adaptive to variation: Automatically compensates for part tolerance stack-ups4
- Prevents damage: Stops increasing force when target is reached
- Quality feedback: Force data provides process monitoring capability
- Gentle handling: Ideal for fragile materials (glass, ceramics, electronics)
Application Categories
| Industry | Typical Application | Target Force Range | Key Benefit |
|---|---|---|---|
| Automotive | Weatherstrip installation | 50-200N | Consistent seal without damage |
| Electronics | PCB component insertion | 10-80N | Prevents board cracking |
| Packaging | Carton sealing | 100-400N | Adapts to fill level variation |
| Medical Device | Catheter assembly | 5-30N | Ensures integrity without deformation |
| Food Processing | Product pressing/forming | 50-500N | Uniform density control |
When Is Position Control Mode the Better Choice?
Position control dominates applications where location precision is paramount. 🎯
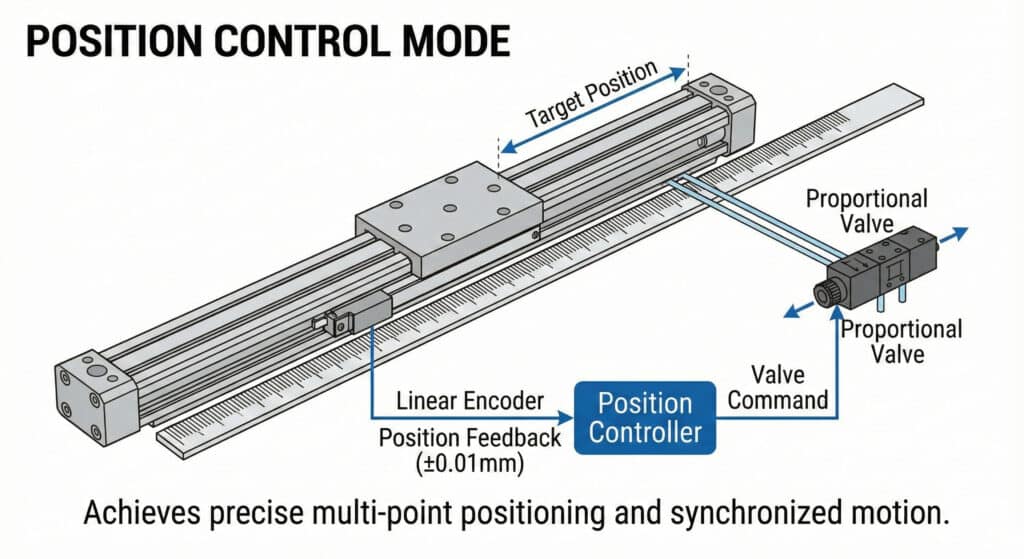
Position control mode is essential when: absolute positioning accuracy within ±0.1mm is required, multiple stop positions along the stroke are needed, synchronized motion with other axes is critical, high-speed point-to-point moves demand optimized velocity profiles, or the application involves picking, placing, sorting, or precise material transfer. Manufacturing processes requiring repeatable locations regardless of load variations benefit most from position control.
Position Control Excellence Areas
Pick-and-Place Operations
Robotic assembly and material handling require cylinders to move to exact locations repeatedly:
- Multi-position stops: One cylinder serves multiple stations along its stroke
- Synchronized motion: Coordinates with conveyors, robots, or other axes
- High-speed accuracy: Maintains precision even at 2+ m/s velocities
Precision Positioning Applications
CNC machine tool loading: Workpieces must align within 0.05mm for machining accuracy
Optical assembly: Lens positioning requires sub-0.1mm repeatability for focus quality
Inspection systems: Camera positioning needs consistent location for image analysis
Motion Profile Optimization
Position control enables sophisticated motion strategies:
- S-curve acceleration5: Smooth start/stop reduces mechanical shock
- Velocity blending: Transitions between moves without stopping
- Electronic gearing: Synchronizes with master axis mathematically
- Flying shear: Matches moving web speed during cutting
Position Control Advantages
- Absolute accuracy: Reaches target within microns
- Multi-point capability: Unlimited stops along stroke length
- Predictable timing: Cycle time consistency for throughput planning
- Synchronization: Coordinates complex multi-axis motion
Typical Specifications
Modern smart rodless cylinders with position control deliver:
- Positioning accuracy: ±0.05mm to ±0.5mm depending on sensor
- Repeatability: ±0.01mm for magnetostrictive systems
- Maximum velocity: 2-3 m/s with controlled deceleration
- Resolution: 0.01mm or better with high-end encoders
Our Bepto position-controlled rodless cylinders provide OEM-equivalent performance at significantly lower cost, with full compatibility for drop-in replacement of major brands. We’ve helped dozens of facilities upgrade aging systems while reducing spare parts inventory costs by 35%. 💰
Can You Combine Both Control Modes in Hybrid Applications?
Advanced applications often require switching between control modes during different cycle phases. 🔀
Hybrid force-position control allows smart cylinders to use position control for rapid approach moves, then switch to force control for the actual work operation, and return to position control for retraction. This combination delivers optimal cycle time (fast positioning) with quality assurance (controlled force application). Implementation requires cylinders with both pressure and position sensors plus controllers capable of mode switching within 10-50ms.

Hybrid Control Strategies
Sequential Mode Switching
Phase 1 – Rapid Approach (Position Control):
- Move quickly to near-contact position
- High velocity (1.5-2 m/s) for cycle time optimization
- Stop 2-5mm before workpiece contact
Phase 2 – Work Operation (Force Control):
- Switch to force control mode
- Apply controlled pressing/assembly force
- Monitor force-displacement curve for quality
Phase 3 – Retraction (Position Control):
- Return to home or intermediate position
- Optimized velocity profile for next cycle
Real-World Hybrid Application
A medical device manufacturer in Minneapolis, Minnesota, uses this exact strategy for catheter tip assembly. The Bepto smart cylinder rapidly positions (position mode) to the assembly station in 0.4 seconds, switches to force mode to apply precisely 18N for heat-staking the tip (0.6 seconds), then retracts under position control (0.3 seconds). Total cycle time: 1.3 seconds with zero defects over 2 million cycles. 🏥
Implementation Requirements
| Component | Specification | Purpose |
|---|---|---|
| Dual Sensors | Pressure + Position | Enable both control modes |
| Fast Controller | <10ms mode switching | Seamless transition |
| Servo/Proportional Valve | High-frequency response | Supports both control types |
| Advanced Software | State machine logic | Manages mode transitions |
Benefits of Hybrid Approach
- Optimized cycle time: Fast moves where precision isn’t critical
- Quality assurance: Controlled force where it matters
- Process monitoring: Both position and force data logged
- Flexibility: Adapt to product variations automatically
Decision Framework
Use Force Control When:
- Part thickness/height varies >0.5mm
- Material properties are inconsistent
- Damage from excessive force is possible
- Process quality depends on force application
Use Position Control When:
- Absolute location accuracy is critical
- Multiple stop positions are required
- Synchronization with other equipment is needed
- Cycle time optimization demands high velocity
Use Hybrid Control When:
- Application has distinct positioning and working phases
- Both speed and quality are critical
- Process monitoring requires both force and position data
- Budget allows for advanced smart cylinder systems
Conclusion
Selecting between force control and position control modes—or implementing hybrid strategies—directly impacts product quality, cycle efficiency, and process capability, making this fundamental decision one of the most important in pneumatic system design for modern manufacturing. 🚀
FAQs About Smart Cylinder Control Modes
Q: Can I retrofit my existing cylinders to add force or position control?
Retrofitting depends on your current cylinder design. Standard cylinders can be upgraded with external position sensors (magnetic strips, draw-wire encoders) for position control, but force control requires pressure transducers in the cylinder ports plus proportional valve control. Complete retrofit costs typically run 60-80% of new smart cylinder pricing, so replacement often makes more economic sense. Bepto offers cost-effective smart rodless cylinder replacements compatible with major OEM mounting interfaces.
Q: How much does force control accuracy depend on air pressure stability?
Force control accuracy is directly proportional to supply pressure stability since F = P × A. A ±0.2 bar pressure fluctuation at 6 bar supply causes ±3.3% force variation. For critical applications requiring ±1% force accuracy, use pressure regulators with ±0.05 bar stability and consider closed-loop pressure control. Position control is less sensitive to pressure variations since it adjusts valve position to achieve target location regardless of pressure.
Q: What response time can I expect when switching between control modes?
Modern smart cylinder controllers switch modes in 10-50ms depending on system architecture. The actual physical response (cylinder motion change) takes an additional 20-100ms based on valve response time and pneumatic system dynamics. For applications requiring frequent mode switching (>5 times per second), ensure your controller and valves are rated for high-frequency operation to avoid performance degradation.
Q: Do force-controlled cylinders consume more air than position-controlled ones?
Force control typically consumes 10-20% more air because it continuously modulates pressure to maintain target force, while position control uses full pressure for moves then holds position with minimal flow. However, force control prevents the wasted energy of over-pressing, which can offset this difference. Actual consumption depends heavily on application duty cycle—consult with our Bepto engineering team for specific calculations based on your process parameters.
Q: Can one smart cylinder handle both tensile (pulling) and compressive (pushing) force control?
Yes, advanced smart cylinders with pressure sensors in both chambers can control force in both directions. This requires dual pressure transducers and bidirectional force calculation (F = P₁×A₁ – P₂×A₂ accounting for rod area differences). Applications like material testing, web tension control, and bidirectional assembly benefit from this capability. Standard implementations typically control force in only one direction (usually pushing) to reduce cost and complexity.
-
A guide explaining how linear encoders convert mechanical motion into electrical signals for precise positioning. ↩
-
An overview of how proportional and servo valves regulate flow and pressure in fluid power systems. ↩
-
A technical resource on interpreting force-displacement curves to analyze material properties and mechanical behaviors. ↩
-
An engineering guide on tolerance stack-up analysis and its impact on assembly fit and function. ↩
-
A comparison of motion profiles explaining how S-curve acceleration reduces mechanical vibration and jerk.ions. ↩
