

Sissejuhatus
Kas teie mitmesilindriline süsteem kannatab sünkroniseerimisvigade all, mis põhjustavad ummistumist, toote kahjustusi või ohutusriske? 😰 Kui kaks või enam pneumaatilist silindrit peavad liikuma üheaegselt – tõstes raskeid koormusi, juhtides laiu paneele või koordineerides keerukaid liigutusi –, tekitavad isegi väikesed positsioonierinevused tõsiseid probleeme. Traditsioonilised avatud ahela pneumaatilised süsteemid ei suuda lihtsalt säilitada tihedat sünkroniseeritust, mida nõuab kaasaegne tootmine.
Kahe kontuuriga juhtimisstrateegiad kasutavad mitme pneumaatilise silindri sünkroniseerimiseks kahte üksteisesse põimitud tagasisidekontuuri: sisemist kiiruskontuuri, mis reguleerib üksikute silindrite kiirust proportsionaalse ventiili modulatsiooni abil, ja välimist asukohakontuuri, mis võrdleb silindrite asukohti ja reguleerib kiiruse seadistuspunkte, et minimeerida sünkroniseerimisviga. Selline arhitektuur saavutab tavaliselt ±0,5 mm kuni ±2 mm sünkroniseerimistäpsuse kuni 3 meetri pikkuste tööliikumiste puhul, võrreldes ±10–50 mm-ga tavaliste pneumaatiliste süsteemide puhul.
Eelmisel kvartalil töötasin koos Steveniga, kes on mehaanikainsener Arizonas Phoenixis asuvas päikesepaneelide tootmisettevõttes. Tema kahe silindriga portaalseadmel, mis on mõeldud 2-meetriste klaasipaneelide käitlemiseks, esines 15 mm sünkroniseerimisvigu, mis põhjustasid paneelide purunemist, mille maksumus oli $8000 kuus. Pärast kahekontuurilise juhtimise rakendamist tema Bepto vardaeta silindrisüsteemile paranes sünkroniseerimine ±1,2 mm-ni, purunemised vähenesid peaaegu nullini ja tootlikkus suurenes 12% tänu kiirematele ohututele töökiirustele. Seletan, kuidas see võimas juhtimisstrateegia toimib. 🎯
Sisukord
- Mis on kahekontuurilised juhtimisstrateegiad ja miks neid vajatakse?
- Kuidas sisemine kiiruse tsükkel reguleerib üksikute silindrite kiirust?
- Kuidas välimine positsioonitsükkel sünkroniseerimist säilitab?
- Millised on rakendamise nõuded ja parimad tavad?
Mis on kahekontuurilised juhtimisstrateegiad ja miks neid vajatakse?
Sünkroniseerimise väljakutse mõistmine näitab, miks on keeruline juhtimine nii oluline. ⚙️
Kahekontuuriline juhtimine lahendab põhilise probleemi, et pneumaatilised silindrid töötavad loomulikult erinevatel kiirustel hõõrdumise muutuste, koormuse tasakaalustamatuse, toite rõhu erinevuste ja õhu kokkusurutavus1. Kahekonksuline arhitektuur eraldab kiiruse juhtimise (sisemine kontuur töötab sagedusel 100–500 Hz) positsiooni sünkroniseerimisest (välimine kontuur sagedusel 10–50 Hz), võimaldades kiiret reageerimist häiretele, säilitades samal ajal koordineeritud liikumise. See hierarhiline lähenemisviis ületab ühekonksulisi süsteeme sünkroniseerimise täpsuse poolest 5–10 korda.

Sünkroniseerimise väljakutse
Miks pneumaatilised silindrid ei sünkroniseeru loomulikult
Isegi “identse” silindri käitumine võib olla erinev järgmistel põhjustel:
- Hõõrdumise muutus: Tihendi kulumine, määrde erinevused (±10-30% jõu muutus)
- Koormuse tasakaalustamatus: Raskuskeskme nihke, ebaühtlane kaalujaotus
- Varustuse rõhu erinevused: Ebavõrdsed joone pikkused, voolu piirangud
- Õhu kokkusurutavus: Temperatuuri ja niiskuse mõju õhu tihedusele
- Tootmistolerantsid: Ava läbimõõt, tihendi mõõtmed (tüüpiline ±0,05 mm)
Need tegurid põhjustavad silindrite vahel kiiruse erinevusi 5–20%, mille tulemuseks on positsioonivead, mis kumuleeruvad töötsükli pikkuse jooksul.
Ühe- ja kahe-silmusega arhitektuur
| Juhtimisarhitektuur | Sünkroniseerimise täpsus | Reageerimisaeg | Keerukus | Kulud |
|---|---|---|---|---|
| Avatud ahel (tagasisidet pole) | ±10–50 mm | EI KOHALDATA | Väga madal | Väga madal |
| Ühe positsiooni silmus | ±3-8mm | 100-300ms | Madal | Madal |
| Kahekordne silmus (kiirus + asukoht) | ±0,5-2mm | 20-80ms | Mõõdukas | Mõõdukas |
| Kolmekordne silmus (lisab jõudu) | ±0,2–1 mm | 10-50ms | Kõrge | Kõrge |
Juhtimissilmuse hierarhia
Välimine silmus (positsiooni sünkroniseerimine):
- Võrdleb kõigi silindrite asendeid
- Arvutab sünkroniseerimisvea
- Reguleerib iga silindri kiiruse seadistuspunkte
- Uuendussagedus: 10–50 Hz (iga 20–100 ms järel)
Sisemine silmus (kiiruse reguleerimine):
- Reguleerib iga silindri kiirust eraldi
- Reguleerib proportsionaalse ventiili asendit
- Reageerib välisringi kiiruse seadistusväärtusele
- Uuendussagedus: 100–500 Hz (iga 2–10 ms järel)
See ülesannete eraldamine võimaldab igal tsüklil optimeerida oma konkreetset ülesannet – kiire sisemine tsükkel tegeleb dünaamilise reageerimisega, samal ajal kui aeglasem välimine tsükkel hoiab koordineeritust. 🔄
Matemaatiline sihtasutus
Silindrite vaheline positsiooniviga on:
$$
Sünkroniseerimisviga
= \left| Asukoht_{Silinder1} – Asukoht_{Silinder2} \right|
$$
Välimine silmus genereerib kiiruse korrektsioone:
$$
Kiirus_{Korrektsioon}
= K_{p} \times sünkroniseerimisviga
+ K_{d} \times \left( \frac{dViga}{dt} \right)
$$
Kus K_p on proportsionaalne võimendus ja K_d on tuletisvõimendus (tüüpiline PD-regulaator).
Bepto on välja töötanud eelseadistatud juhtparameetrid tavaliste sünkroniseerimisrakenduste jaoks, mis lühendavad kasutuselevõtu aega päevadelt tundidele, tagades samal ajal stabiilse ja täpse toimimise.
Kuidas sisemine kiiruse tsükkel reguleerib üksikute silindrite kiirust?
Sisemine silmus tagab kiire ja täpse kiiruse juhtimise, mis võimaldab sünkroniseerimist. 🚀
Sisemine kiirussilmus kasutab positsioonisensorit (lineaarne kodeerija või magnetostriktiivne2) reaalajas silindri kiiruse arvutamiseks läbi numbriline diferentseerimine3, võrdleb seda välimise kontuuri kiiruse seadistusväärtusega ja reguleerib proportsionaalset või servoventiili, et minimeerida kiiruse viga. Töötades sagedusel 100–500 Hz PI- või PID-juhtimisalgoritmidega, saavutab see kontuur kiiruse täpsuse ±2–5% piires ja reageerib häiretele 10–30 ms jooksul, pakkudes sünkroniseerimiseks vajalikku stabiilset kiiruse juhtimise alust.
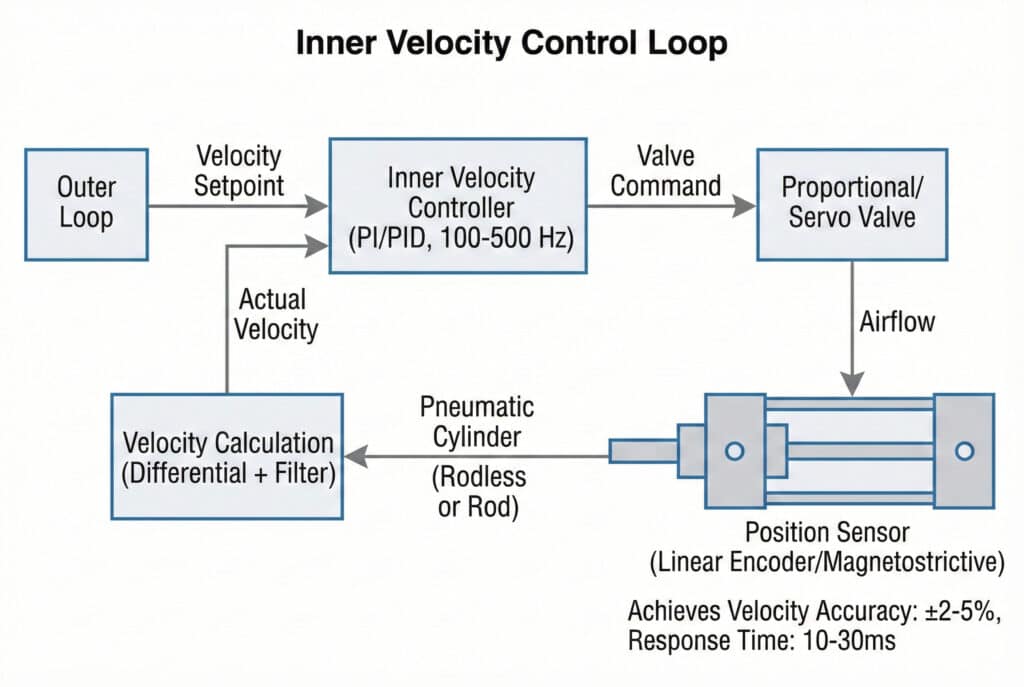
Kiiruse mõõtmise meetodid
Otsene kiiruse arvutamine
Enamik süsteeme tuletab kiiruse positsiooni tagasisidest:
$$
Kiirus
= \frac{Praegune positsioon – Eelmine positsioon}{Proovi aeg}
$$
100 Hz juhtimissilmuse puhul (10 ms proovivõtu aeg):
- Asendi muutus 1 mm = kiirus 100 mm/s
- Asendianduri eraldusvõime 0,01 mm = 1 mm/s kiiruse eraldusvõime
Filtreerimisnõuded
Toores kiiruse arvutused on müra tõttu:
- Asendianduri kvantiseerimine
- Mehaaniline vibratsioon
- Elektriline müra
Madalpääsfiltriga filtreerimine silub signaali:
- Esimese järgu filter: lihtne, tüüpiline ajakonstant 5–20 ms
- Liikuv keskmine: 3–10 valimiaken
- Kalmani filter: optimaalne, kuid keeruline
Filtri ajakonstant peab olema kiirem kui juhtimissilmuse reaktsioon (tavaliselt 1/5 kuni 1/10 silmuse ribalaiusest).
Klapi juhtimisstrateegiad
Proportsionaalne ventiili modulatsioon
Kiiruse regulaator väljastab ventiili käsu (tavaliselt 0–10 V või 4–20 mA):
$$
Valve_{Käsk}
= Eelneva tagasiside + PI_{korrektsioon}
$$
Feedforward4 komponent: Soovitud kiiruse ja koormuse alusel (parandab reageerimisvõimet)
PI parandus: Kõrvaldab püsivvea
| Klapi tüüp | Reageerimisaeg | Resolutsioon | Kulud | Parim rakendus |
|---|---|---|---|---|
| Proportsionaalne suunamine | 20-50ms | 8–12 bitti | Keskmine | Üldine sünkroniseerimine |
| Servoventiil | 5-15ms | 12–16 bitti | Kõrge | Kõrge täpsusega süsteemid |
| PWM-juhtimisega digitaalne | 10–30 ms | 8–10 bitti efektiivne | Madal | Kulutundlikud rakendused |
Sisemise tsükli häälestamine
1. samm: Proportsionaalne võimendus (K_p)
- Alusta madala võimendusega (K_p = 0,1)
- Suurendage, kuni süsteem reageerib kiiresti ilma võnkumisteta.
- Tüüpiline vahemik: 0,5–2,0 kiiruse reguleerimiseks
2. samm: integraalne võimendus (K_i)
- Lisage integraalne tegevus, et kõrvaldada püsiv viga
- Alusta väga madalalt (K_i = 0,01)
- Tüüpiline vahemik: 0,05–0,3
3. samm: tuletisvõimendus (K_d) (valikuline)
- Lisab summutust süsteemidele, millel esineb ületõus
- Sageli pole pneumaatilise kiiruse reguleerimiseks vajalik
- Kasutada ainult vajaduse korral: 0,01–0,1
Reaalne jõudlus
Atlanta, Georgia osariigis asuv pakkemasinate tootja rakendas neljal sünkroniseeritud Bepto vardaeta silindril sisemisi kiirussilmuseid. Enne häälestamist varieerus kiirus silindrite vahel ±15%. Pärast sisemiste silmuste nõuetekohast häälestamist:
- Kiiruse jälgimisviga: ±3% seadistatud väärtusest
- Reageerimine koormuse häiretele: 25 ms
- Kiiruse kõikumine: <2% (sujuv liikumine)
- Sünkroniseerimise alus: lubatud ±1,5 mm välimise silmuse täpsus ✅
Kuidas välimine positsioonitsükkel sünkroniseerimist säilitab?
Välimine tsükkel koordineerib mitut silindrit, reguleerides nende kiiruse seadistuspunkte. 🎛️
Välimine positsioonisilmus rakendab master-slave või virtuaalse master arhitektuuri: see võrdleb pidevalt silindrite positsioone, arvutab iga slave-silindri sünkroniseerimisvea suhtes master-silindriga (või keskmise positsiooniga) ja reguleerib individuaalseid kiiruse seadistuspunkte vea minimeerimiseks. Töötades sagedusel 10–50 Hz PD-juhtimisega (proportsionaal-derivatiivne), genereerib see silmus kiiruse korrektsioone ±10–50%, mis viivad silindrid pärast häireid 50–200 ms jooksul tagasi joondusse, säilitades sünkroniseerimise kogu töötsükli jooksul.
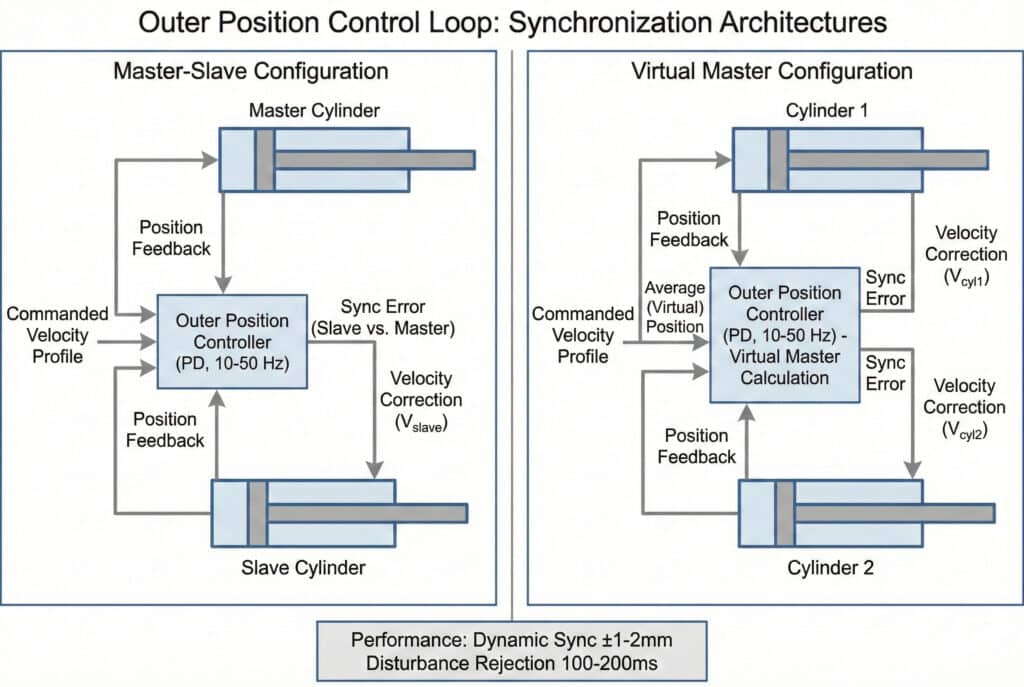
Sünkroniseerimise arhitektuurid
Master-Slave konfiguratsioon
Üks silinder, mis on määratud “peasilindriks”:
- Master järgib käskitud kiirusprofiili
- Orja silindrid reguleerivad kiirust vastavalt peaasendi positsioonile
- Lihtne, etteaimatav käitumine
- Puudus: pea-silindri vead levivad ka abisilindritesse.
Orja kiiruse korrigeerimine:
$$
V_{ori}
= V_{käskitud}
+ K_{p} \times (Pos_{master} – Pos_{slave})
+ K_{d} \times (Vel_{master} – Vel_{slave})
$$
Virtuaalne master-konfiguratsioon
Keskmine positsioon muutub viiteks:
- Virtuaalne_positsioon = (Pos_1 + Pos_2 + … + Pos_n) / n
- Kõik silindrid reguleeritakse vastavalt virtuaalsele asendile
- Eelis: jaotab vead kõigi silindrite vahel
- Sobib paremini süsteemidele, millel on 3+ silindrit
Iga silindri kiiruse korrigeerimine:
$$
V_{silinder_i}
= V_{käskitud}
K_{p} \times (Pos_{virtuaalne} – Pos_{silinder_i})
$$
Sünkroniseerimisvea haldamine
Veapiirid ja küllastus
Välimine tsükkel peab sisaldama piire:
Maksimaalne kiiruse korrigeerimine: ±30–50% käsitsi määratud kiirus
- Takistab ühe silindri ära jooksmist
- Säilitab süsteemi stabiilsuse
- Tagab, et kõik silindrid liiguvad edasi
Häire vea lävi: tüüpiline 5–10 mm
- Ületamisel tekitab veaolukorra
- Näitab mehaanilist probleemi või juhtimise riket
- Vältib seadmete kahjustumist
Ristseostamisstrateegiad
Kõrgtasemelised süsteemid rakendavad silindrite vahelist ristseostust:
| Strateegia | Kirjeldus | Sünkroniseerimise parandamine | Keerukus |
|---|---|---|---|
| Sõltumatu kontroll | Iga silinder on eraldi juhitav | Põhitasemel | Madal |
| Master-Slave | Orjad järgivad isandat | 3–5 korda parem | Madal |
| Virtuaalne magistriõpe | Kõik järgivad keskmist positsiooni | 4–6 korda parem | Mõõdukas |
| Täielik ristseostamine | Iga silinder arvestab kõiki teisi | 5–8 korda parem | Kõrge |
Välise silmuse häälestamine
Proportsionaalne võimendus (K_p):
- Määrab, kui agressiivselt silindrid sünkroniseerimisvigu parandavad.
- Liiga madal: aeglane korrigeerimine, suur püsiv viga
- Liiga kõrge: võnkumine, silindrite vaheline võitlus
- Tüüpiline vahemik: 0,5–2,0 (mõõtühikuta)
Derivatiivne kasum (K_d):
- Pakub summutust kiiruse erinevuse alusel
- Vältib ületõusu vigade parandamisel
- Tüüpiline vahemik: 0,1–0,5
Häälestamise protseduur:
- Määra K_d = 0, K_p = 0,5
- Sisestage 5 mm positsiooni nihke silindrite vahel
- Suurendage K_p, kuni korrigeerimine on kiire ja ilma võnkumisteta.
- Lisage K_d, et vähendada vajadusel ületõusu.
Tulemuslikkuse näitajad
Hästi häälestatud kahekontuurilised süsteemid saavutavad:
- Staatiline sünkroniseerimine: ±0,5–1 mm puhkeolekus
- Dünaamiline sünkroniseerimine: ±1–2 mm liikumise ajal
- Häirete tõrje: Sünkroniseerimine taastub 100–200 ms jooksul
- Kiiruse jälgimine: ±3-5% silindrite vahel
Meie Bepto kahe silmusega sünkroniseeritud süsteemid on paigaldatud üle 150 paigalduspaiga üle maailma, kandes koormusi 50 kg kuni 5000 kg ja tööulatusega kuni 4 meetrit. 🌍
Millised on rakendamise nõuded ja parimad tavad?
Edukas kahe kontuuri sünkroniseerimine nõuab sobivat riistvara, tarkvara ja kasutuselevõttu. 🛠️
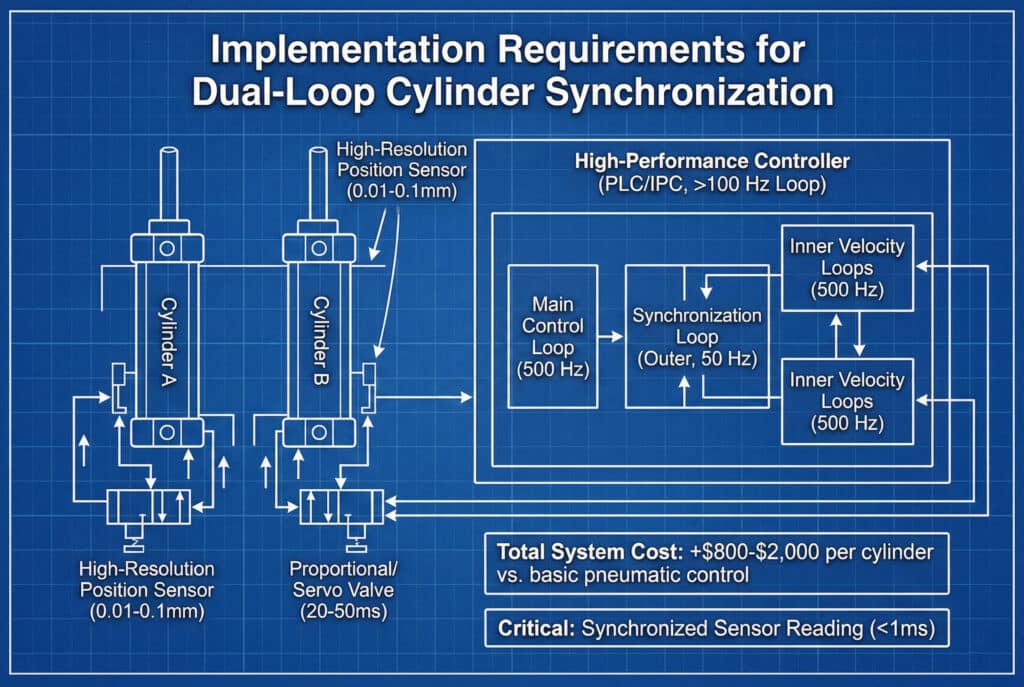
Rakendamine nõuab: kõrge resolutsiooniga positsioonisensoreid igal silindril (resolutsioon 0,01–0,1 mm), proportsionaalseid või servoventiile igal silindril (reageerimisaeg 20–50 ms), kontrollerit, mis suudab täita üle 100 Hz tsükli (tööstuslik arvuti või suure jõudlusega PLC), sünkroniseeritud sensori lugemist (1 ms piires) ja sobivat mehaanilist konstruktsiooni piisava jäikusega (omavõnkesagedus >20 Hz). Tarkvara peab rakendama mõlemat juhtimissilmust koos sobiva filtreerimise, anti-windup ja vea tuvastamisega. Süsteemi kogumaksumus on $800–2000 silindri kohta võrreldes põhilise pneumaatilise juhtimisega.
Nõuded riistvarale
Asendiandurid
| Anduri tüüp | Resolutsioon | Täpsus | Kulu/silinder | Best For |
|---|---|---|---|---|
| Magnetiline lineaarkooder | 0.1mm | ±0.2mm | $150-300 | Üldised rakendused |
| Magnetostriktiivne | 0.01mm | ±0.05mm | $400-800 | Kõrge täpsusega süsteemid |
| Optiline lineaarskaala | 0.001mm | ±0,01mm | $600-1,200 | Ülikõrge täpsus (haruldane) |
| Tõmbejuhtme enkooder | 0.1mm | ±0,5 mm | $200-400 | Pikad tõmbed (>2 m) |
Kriitiline nõue: Kõik andurid tuleb lugeda sünkroonselt (1 ms jooksul), et vältida valesünkroniseerimisvigu.
Klapi valik
Proportsionaalsed ventiilid on miinimumnõuded:
- Reageerimisaeg: <50 ms
- Resolutsioon: minimaalne 8-bitine (soovitavalt 12-bitine)
- Voolukiirus: vastavus silindri siseläbimõõdule ja soovitud kiirusele
- Elektriline liides: 0–10 V või 4–20 mA analoogsisend
Servoventiilid kõrge jõudluse jaoks:
- Reaktsiooniaeg: <20 ms
- Resolutsioon: 12–16 bitti
- Ülim lineaarne ja korratavus
- Kõrgemad kulud: 2–3× proportsionaalsed klapid
Kontrollerplatvormi valik
PLC-põhised süsteemid
Eelised:
- Tuttav programmeerimiskeskkond
- Integreeritud masina juhtimisega
- Tugev tööstusdisain
Nõuded:
- Kiired analoog-I/O-moodulid (100+ Hz)
- Ujukomaarvutusvõime
- Piisav skaneerimisaeg (<5 ms kahekontuurilise juhtimise puhul)
Sobivad PLC-d: Siemens S7-1500, Allen-Bradley ControlLogix, Beckhoff CX seeria
Tööstuslik arvuti / liikumiskontroller
Eelised:
- Suurem arvutusvõimsus
- Kiiremad silmuskiirused (võimalik 1 kHz+)
- Täiustatud algoritmid on lihtsam rakendada
Puudused:
- Keerulisem programmeerimine
- Võib nõuda eraldi ohutus-PLC-d
Tarkvara arhitektuur
Juhtimissilmuse struktuur
Peamine juhtimissilmus (500 Hz):
1. Loe kõik positsioonisensorid (sünkroniseeritud)
2. Arvutage kiirused (filtreeritud diferentseerimine)
Sisemine silmus (ühe silindri kohta):
3. Võrdle tegelikku ja seatud kiirust
4. Arvutage PI-korrektsioon
5. Väljundventiili käsk
Sünkroniseerimissilmus (50 Hz, iga 10. tsükkel):
6. Arvutage sünkroniseerimisvead
7. Kiiruse korrigeerimiste genereerimine (PD-juhtimine)
8. Sisemiste tsüklite kiiruse seadistuste uuendamine
9. Kontrollige veapiiranguid ja vigu
Olulised tarkvarafunktsioonid
- Tuulekaitse5: Takistab integraaltermide kogunemist piirväärtuste juures
- Tõrgeteta üleminek: Sujuv üleminek režiimide vahel (käsitsi/automaatne)
- Rikke tuvastamine: Jälgib anduri kehtivust, liigseid vigu
- Andmete logimine: Salvestab asukoha, kiiruse ja vead diagnostika jaoks
- Häälestusliides: Võimaldab parameetrite reguleerimist ilma uuesti kompileerimata
Parimate tavade kasutuselevõtt
1. samm: Mehaaniline kontroll
- Kontrollige silindri kinnituse jäikust
- Kontrollige koormuse tasakaalu (10% piires)
- Tagage sujuv liikumine ilma takerdumiseta
2. samm: individuaalne silindri häälestamine
- Häälestage iga sisemine kiirussilmus eraldi
- Kontrollige ±5% kiiruse jälgimist enne sünkroniseerimist
3. samm: sünkroniseerimistsükli häälestamine
- Alusta madala välise silmuse võimendusega
- Suurendage järk-järgult, jälgides stabiilsust
- Test koormuse muutuste ja häiretega
4. samm: Tulemuslikkuse valideerimine
- Käivita üle 100 tsükli, mõõtes sünkroniseerimisviga
- Veenduge, et viga jääb spetsifikatsioonide piiresse
- Dokumendi lõplikud parameetrid
Tavalised rakendamisvead
| Viga | Tagajärjed | Lahendus |
|---|---|---|
| Sünkroniseerimata andurilugem | Vale sünkroniseerimisvead | Kasutage riistvarapõhist samaaegset proovivõttu |
| Ebapiisav filtreerimine | Mürakat kiiruse signaalid | Lisage sobiv madalpääsfilter (10–20 ms) |
| Välimine silmus liiga kiire | Võitlus sisemise silmusega | Välimine silmus ≤ 1/5 sisemise silmuse kiirusest |
| Kiiruse etteandmine puudub | Aeglane reageerimine | Lisa etteantud kiiruse põhjal etteantud tagasiside |
| Mehaaniliste probleemide ignoreerimine | Halb tulemus hoolimata häälestamisest | Kõigepealt paranda sidumist, tasakaalustamatust või paindlikkust. |
Reaalse maailma edulugu
Maria, automaatika insener klaasitöötlemisettevõttes Toledo linnas Ohio osariigis, püüdis nädalaid sünkroniseerida kolme Bepto vardaeta silindrit, mis toetasid 3 meetri laiust konveieritransporti. Tema süsteem näitas ulatusliku häälestamise järel 8 mm sünkroniseerimisvigu. Kui meie tehniline meeskond tema rakenduse üle vaatas, avastasime järgmist:
- Andurite näidud ei olnud sünkroniseeritud (50 ms hälve)
- Välimine tsükkel töötas sama kiirusega kui sisemine tsükkel (ebastabiilsus)
- Kiiruse filtreerimist ei toimu (ülemäärane müra)
Pärast meie soovitatud arhitektuuri rakendamist sünkroniseeritud 100 Hz sisemiste tsüklite ja 20 Hz välimiste tsüklitega saavutas tema süsteem ±1,3 mm sünkroniseerituse, mis ületas tema ±2 mm spetsifikatsiooni varuga. 🎉
Kokkuvõte
Kahe kontuuriga juhtimisstrateegiad muudavad pneumaatilise silindri sünkroniseerimise ebausaldusväärsest väljakutsest täpseks ja korratavaks protsessiks, võimaldades rakendusi, mis nõuavad koordineeritud mitme silindri liikumist, kasutades samal ajal ära pneumaatilise ajamiga seotud kulude ja lihtsuse eelised võrreldes kallite elektriliste servosüsteemidega. 💪
Korduma kippuvad küsimused kahe tsükli sünkroniseerimise juhtimise kohta
K: Kas ma saan saavutada hea sünkroniseerimise ainult positsioonisilmusega (ilma kiirussilmuseta)?
Ühe kontuuriga positsiooniregulatsioon võimaldab saavutada ±3–8 mm sünkroniseeritust aeglaselt liikuvate süsteemide puhul (<0,5 m/s), kuid pneumaatilise viite ja ventiili reageerimisviivituse tõttu on see raskendatud kiiremate liikumiste puhul. Sisemine kiiruskontuur tagab häirete kõrvaldamiseks ja sujuvaks liikumiseks vajaliku kiire reageerimise. Rakenduste puhul, mis nõuavad ±5 mm täpsust või kiirusi üle 0,5 m/s, on soovitatav kasutada kahe kontuuriga regulatsiooni – jõudluse paranemine õigustab mõõdukat keerukuse suurenemist.
K: Kui palju silindreid saab sünkroniseerida kahe kontuuriga juhtimise abil?
Oleme edukalt rakendanud 2–6 silindriga süsteeme, kasutades kahekontuurilist juhtimist. 2–3 silindriga süsteemid on lihtsad; 4–6 silindriga süsteemid nõuavad keerulisemat ristühendust ja suuremat arvutusvõimsust. Rohkem kui 6 silindri puhul tuleks kaaluda jagamist mitmeks sünkroniseeritud rühmaks. Piiravateks teguriteks on kontrollerite arvutusvõimsus ja mehaaniline keerukus, mis on seotud jäikuse säilitamisega paljude ühenduspunktide puhul, mitte juhtimisalgoritm ise.
K: Mis juhtub, kui üks positsioonisensor töötamise ajal rikkeid tekitab?
Õige vea tuvastamine peaks kohe ära tundma anduri rikke (signaal väljaspool vahemikku, võimatu kiirus või külmunud näidud) ja käivitama kõikide silindrite kontrollitud seiskamise. Mõned arenenud süsteemid võivad jätkata töötamist halvenenud režiimis, kasutades allesjäänud andureid, kuid see nõuab hoolikat ohutusanalüüsi. Bepto soovitab kriitiliste rakenduste jaoks kasutada dubleerivaid andureid või rakendada diferentsiaalrõhu andureid varu-löögi lõpu tuvastamise meetodina.
K: Kas kahekontuuriline juhtimine töötab tavaliste sisse-välja-ventiilidega või on vaja proportsionaalventiile?
Kahekontuuriline juhtimine nõuab proportsionaal- või servoventiile, et modifitseerida silindri kiirust pidevalt – tavalised sisse-välja ventiilid ei suuda tagada vajalikku muutuvat voolu juhtimist. Kiiresti lülituvate sisse-välja ventiilide PWM (impulsi laiusmodulatsioon) juhtimine võib aga proportsionaalse juhtimise ligikaudselt asendada 60–80% kuluga. Eelarvetundlikes rakendustes annab kahekontuuriline PWM-juhtimine häid tulemusi (±2–4 mm sünkroniseerimine), kuigi see ei vasta täielikult tõelise proportsionaalventiili jõudlusele (±0,5–2 mm).
K: Kuidas toime tulla koormuse ebavõrdsusega, kui üks silinder kannab rohkem koormust kui teised?
Kuni 20-30% suuruseid koormuse tasakaalustamatusi käsitleb automaatselt kahekontuuriline regulaator – sisemine kiiruskontuur reguleerib ventiili asendit, et säilitada erinevate koormuste korral võrdne kiirus. Suuremate tasakaalustamatuste puhul (>30%) kaaluge järgmisi võimalusi: mehaaniline koormuse tasakaalustamine (kinnituspunktide reguleerimine), etteantav kompenseerimine (koormusest sõltuva ventiili eelpinge lisamine) või individuaalne rõhu reguleerimine (iga silindri toiterõhu reguleerimine). Meie Bepto insenerimeeskond võib analüüsida teie konkreetset koormuse jaotust ja soovitada teie rakendusele optimaalset lähenemisviisi.
-
Õhu omadus, mis võimaldab selle mahul muutuda rõhu muutudes, põhjustades viivitusi ja mittelineaarsust pneumaatilistes süsteemides. ↩
-
Tugev asukoha tuvastamise tehnoloogia, mis kasutab magnetväljade ja pingepulsside vastastikust mõju kauguse mõõtmiseks. ↩
-
Arvutusprotsess kiiruse hindamiseks, arvutades positsiooni muutuse kindla ajavahemiku jooksul. ↩
-
Proaktiivne juhtimistehnika, mis reguleerib süsteemi lähtuvalt võrdlussignaalist või häiretest enne, kui need mõjutavad väljundit. ↩
-
Mehhanism, mis takistab PID-regulaatori integraaltermi liigse vea kogunemist, kui aktuaator on küllastunud. ↩
