

Ievads
Vai jūsu daudzcilindru sistēma saskaras ar sinhronizācijas kļūdām, kas izraisa bloķēšanos, produktu bojājumus vai drošības apdraudējumu? 😰 Kad diviem vai vairākiem pneimatiskajiem cilindriem ir jāpārvietojas kopā — pacelt smagas kravas, vadīt platas plāksnes vai koordinēt sarežģītas kustības — pat nelielas pozīcijas atšķirības rada nopietnas problēmas. Tradicionālās atvērtās cilpas pneimatiskās sistēmas vienkārši nespēj uzturēt stingru sinhronizāciju, kādu prasa mūsdienu ražošana.
Divkāršās cilpas vadības stratēģijas izmanto divas savstarpēji saistītas atgriezeniskās cilpas, lai sinhronizētu vairākus pneimatiskos cilindrus: iekšējo ātruma cilpu, kas kontrolē atsevišķu cilindru ātrumu, izmantojot proporcionālu vārstu modulāciju, un ārējo pozīcijas cilpu, kas salīdzina cilindru pozīcijas un pielāgo ātruma iestatījumus, lai samazinātu sinhronizācijas kļūdu. Šī arhitektūra parasti nodrošina ±0,5 mm līdz ±2 mm sinhronizācijas precizitāti visā gājiena garumā līdz 3 metriem, salīdzinot ar ±10–50 mm pamata pneimatiskajās sistēmās.
Pagājušajā ceturksnī es strādāju kopā ar Stīvenu, mehānisko inženieri saules paneļu ražotnē Fīniksā, Arizonā. Viņa divcilindru portāla sistēmai, kas paredzēta 2 metrus garu stikla paneļu pārvietošanai, bija 15 mm sinhronizācijas kļūdas, kas izraisīja paneļu bojājumus, kas mēnesī izmaksāja $8000. Pēc divkāršās cilpas kontroles ieviešanas viņa Bepto bezstieņu cilindru sistēmā sinhronizācija uzlabojās līdz ±1,2 mm, bojājumi samazinājās gandrīz līdz nullei, un caurlaidspēja palielinājās par 12%, pateicoties ātrākai un drošākai darbībai. Ļaujiet man izskaidrot, kā darbojas šī spēcīgā kontroles stratēģija. 🎯
Satura rādītājs
- Kas ir divkāršās cilpas kontroles stratēģijas un kāpēc tās ir nepieciešamas?
- Kā iekšējā ātruma cilpa kontrolē atsevišķu cilindru ātrumu?
- Kā ārējā pozīcijas cilpa uztur sinhronizāciju?
- Kādas ir īstenošanas prasības un labākā prakse?
Kas ir divkāršās cilpas kontroles stratēģijas un kāpēc tās ir nepieciešamas?
Saskaņošanas problēmas izpratne atklāj, kāpēc ir nepieciešama sarežģīta kontrole. ⚙️
Divkāršā cilpa risina fundamentālu problēmu, ka pneimatiskie cilindri dabiski darbojas ar atšķirīgu ātrumu berzes svārstību, slodzes nelīdzsvarotības, piegādes spiediena atšķirību un citu iemeslu dēļ. gaisa saspiežamība1. Divkāršā cilpa arhitektūra nodala ātruma kontroli (iekšējā cilpa darbojas 100–500 Hz frekvencē) no pozīcijas sinhronizācijas (ārējā cilpa darbojas 10–50 Hz frekvencē), nodrošinot ātru reakciju uz traucējumiem, vienlaikus saglabājot koordinētu kustību. Šī hierarhiskā pieeja sinhronizācijas precizitātes ziņā 5–10 reizes pārspēj vienkāršās cilpas sistēmas.

Sinhronizācijas izaicinājums
Kāpēc pneimatiskie cilindri nesinhronizējas dabīgi
Pat “identiski” cilindri uzrāda atšķirīgu uzvedību šādu iemeslu dēļ:
- Berzes variācijas: Vārsta nodilums, eļļošanas atšķirības (±10-30% spēka svārstības)
- Slodzes nelīdzsvarotība: Smaguma centra nobīde, nevienmērīga svara sadale
- Piegādes spiediena atšķirības: Nevienādi līniju garumi, plūsmas ierobežojumi
- Gaisa saspiežamība: Temperatūras un mitruma ietekme uz gaisa blīvumu
- Ražošanas pielaides: Urbumu diametrs, blīvju izmēri (±0,05 mm tipiski)
Šie faktori izraisa ātruma atšķirības 5-20% starp cilindriem, kas izraisa pozīcijas kļūdas, kas uzkrājas pārgājiena garumā.
Vienkāršā cilpa pret dubultā cilpa arhitektūra
| Vadības arhitektūra | Sinhronizācijas precizitāte | Reakcijas laiks | Sarežģītība | Izmaksas |
|---|---|---|---|---|
| Atvērta cilpa (bez atgriezeniskās saites) | ±10–50 mm | NAV PIEMĒROJAMS | Ļoti zems | Ļoti zems |
| Vienas pozīcijas cilpa | ±3-8 mm | 100-300ms | Zema | Zema |
| Divkāršā cilpa (ātrums + pozīcija) | ±0,5-2 mm | 20-80ms | Mērens | Mērens |
| Trīskāršais cilpa (pievieno spēku) | ±0,2–1 mm | 10-50ms | Augsts | Augsts |
Kontrolējošā cilpa hierarhija
Ārējā cilpa (pozīcijas sinhronizācija):
- Salīdzina visu cilindru pozīcijas
- Aprēķina sinhronizācijas kļūdu
- Pielāgo ātruma iestatījumus katram cilindram
- Atjaunināšanas ātrums: 10–50 Hz (ik pēc 20–100 ms)
Iekšējais cilpa (ātruma kontrole):
- Kontrolē atsevišķu cilindru ātrumu
- Modulē proporcionālo vārsta pozīciju
- Reaģē uz ātruma iestatījumu no ārējās cilpas
- Atjaunināšanas ātrums: 100–500 Hz (ik pēc 2–10 ms)
Šī funkciju nošķiršana ļauj katram ciklam optimizēt savu konkrēto uzdevumu — ātrākais iekšējais cikls apstrādā dinamisko reakciju, bet lēnākais ārējais cikls uztur koordināciju. 🔄
Matemātiskais fonds
Pozīcijas kļūda starp cilindriem ir:
$$
Sinhronizācijas kļūda
= \left| Pozīcija_{Cilindrs1} – Pozīcija_{Cilindrs2} \right|
$$
Ārējā cilpa ģenerē ātruma korekcijas:
$$
Ātrums_{Korekcija}
= K_{p} \times Sinhronizācijas kļūda
+ K_{d} \times \left( \frac{dError}{dt} \right)
$$
Kur K_p ir proporcionālais pastiprinājums un K_d ir atvasinājuma pastiprinājums (tipisks PD regulators).
Bepto ir izstrādājis iepriekš iestatītus kontroles parametrus visbiežāk lietotajām sinhronizācijas lietojumprogrammām, samazinot uzstādīšanas laiku no vairākām dienām līdz dažām stundām un nodrošinot stabilu un precīzu darbību.
Kā iekšējā ātruma cilpa kontrolē atsevišķu cilindru ātrumu?
Iekšējā cilpa nodrošina ātru un precīzu ātruma kontroli, kas ļauj sinhronizēt. 🚀
Iekšējā ātruma cilpa izmanto pozīcijas sensoru (lineāro kodētāju vai magnetostriktīvs2), lai aprēķinātu cilindru ātrumu reālajā laikā, izmantojot numuriska diferenciācija3, salīdzina to ar ātruma iestatījumu no ārējās cilpas un pielāgo proporcionālo vai servovārstu, lai samazinātu ātruma kļūdu. Darbojoties ar 100–500 Hz ar PI vai PID vadības algoritmiem, šī cilpa sasniedz ātruma precizitāti ±2–5% robežās un reaģē uz traucējumiem 10–30 ms laikā, nodrošinot stabilu ātruma vadības pamatu, kas nepieciešams sinhronizācijai.
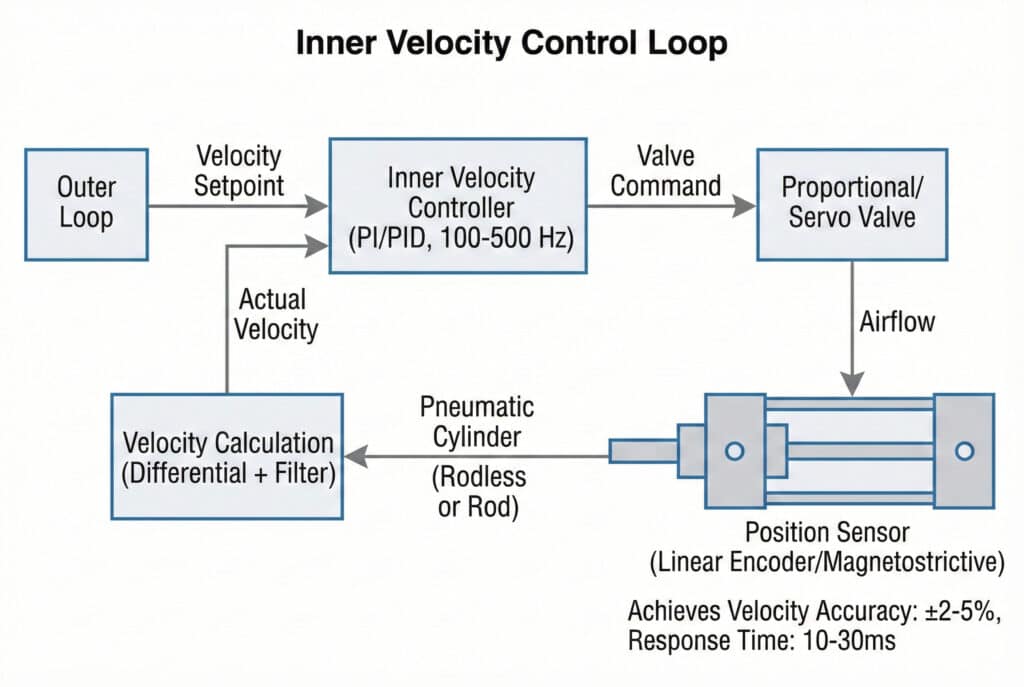
Ātruma mērīšanas metodes
Tiešais ātruma aprēķins
Lielākā daļa sistēmu ātrumu aprēķina, izmantojot pozīcijas atgriezenisko saiti:
$$
Ātrums
= \frac{Pašreizējā pozīcija – Iepriekšējā pozīcija}{Parauga laiks}
$$
100 Hz vadības cilpas gadījumā (10 ms parauga laiks):
- Pozīcijas izmaiņas 1 mm = ātrums 100 mm/s
- Pozīcijas sensora izšķirtspēja 0,01 mm = 1 mm/s ātruma izšķirtspēja
Filtrēšanas prasības
Neapstrādātu ātruma aprēķini ir neprecīzi šādu iemeslu dēļ:
- Pozīcijas sensora kvantizācija
- Mehāniskā vibrācija
- Elektriskais troksnis
Zemfrekvences filtrēšana izlīdzina signālu:
- Pirmās pakāpes filtrs: vienkāršs, tipiskais laika konstante 5–20 ms
- Pārvietojamais vidējais: 3-10 paraugu logs
- Kalmana filtrs: optimāls, bet sarežģīts
Filtra laika konstantei jābūt ātrākai nekā vadības cilpas reakcijai (parasti 1/5 līdz 1/10 no cilpas joslas platuma).
Vārstu vadības stratēģijas
Proporcionālā vārsta modulācija
Ātruma regulators izvada vārsta komandu (parasti 0–10 V vai 4–20 mA):
$$
Vārsts_{Komanda}
= Priekšējsavienojums + PI_{Korekcija}
$$
Feedforward4 komponents: Pamatojoties uz vēlamo ātrumu un slodzi (uzlabo reakciju)
PI korekcija: Novērš pastāvīgas kļūdas
| Vārstu tips | Reakcijas laiks | Rezolūcija | Izmaksas | Labākais pieteikums |
|---|---|---|---|---|
| Proporcionāla virziena | 20-50ms | 8–12 biti | Vidēja | Vispārējā sinhronizācija |
| Servoventils | 5-15ms | 12–16 biti | Augsts | Augstas precizitātes sistēmas |
| PWM vadīts digitālais | 10–30 ms | 8–10 bitu efektivitāte | Zema | Izmaksu ziņā jutīgi lietojumi |
Iekšējās cilpas regulēšana
1. solis: Proporcionālais pastiprinājums (K_p)
- Sāciet ar zemu pastiprinājumu (K_p = 0,1)
- Palieliniet, līdz sistēma reaģē ātri bez svārstībām.
- Tipisks diapazons: 0,5–2,0 ātruma kontrolei
2. solis: Integrālais pieaugums (K_i)
- Pievienojiet integrālo darbību, lai novērstu pastāvīgas stāvokļa kļūdas
- Sāciet ar ļoti zemu vērtību (K_i = 0,01)
- Tipisks diapazons: 0,05–0,3
3. solis: Atvasinājuma pieaugums (K_d) (pēc izvēles)
- Pievieno amortizāciju sistēmām ar pārsniegumu
- Bieži vien nav nepieciešams pneimatiskai ātruma kontrolei
- Lietot tikai nepieciešamības gadījumā: 0,01–0,1
Reālā veiktspēja
Iepakojuma mašīnu ražotājs Atlantā, Džordžijas štatā, ieviesa iekšējās ātruma cilpas četrās sinhronizētās Bepto bezstieņu cilindros. Pirms regulēšanas ātrums cilindros svārstījās ±15%. Pēc pareizas iekšējās cilpas regulēšanas:
- Ātruma izsekošanas kļūda: ±3% no iestatījuma
- Reakcija uz slodzes traucējumiem: 25 ms
- Ātruma svārstības: <2% (vienmērīga kustība)
- Sinhronizācijas pamats: iespējots ±1,5 mm ārējās cilpas precizitāte ✅
Kā ārējā pozīcijas cilpa uztur sinhronizāciju?
Ārējā cilpa koordinē vairākus cilindrus, regulējot to ātruma iestatījumus. 🎛️
Ārējā pozīcijas cilpa īsteno galvenā-pakļautā vai virtuālā galvenā arhitektūra: tā nepārtraukti salīdzina cilindru pozīcijas, aprēķina sinhronizācijas kļūdu katram pakļautajam cilindram attiecībā pret galveno (vai vidējo pozīciju) un pielāgo atsevišķus ātruma iestatījumus, lai minimizētu kļūdu. Darbojoties ar 10–50 Hz ar PD kontroli (proporcionāli-atvasināta), šī cilpa ģenerē ātruma korekcijas ±10–50%, kas pēc traucējumiem 50–200 ms laikā atjauno cilindru saskaņotību, uzturot sinhronizāciju visā gājienā.
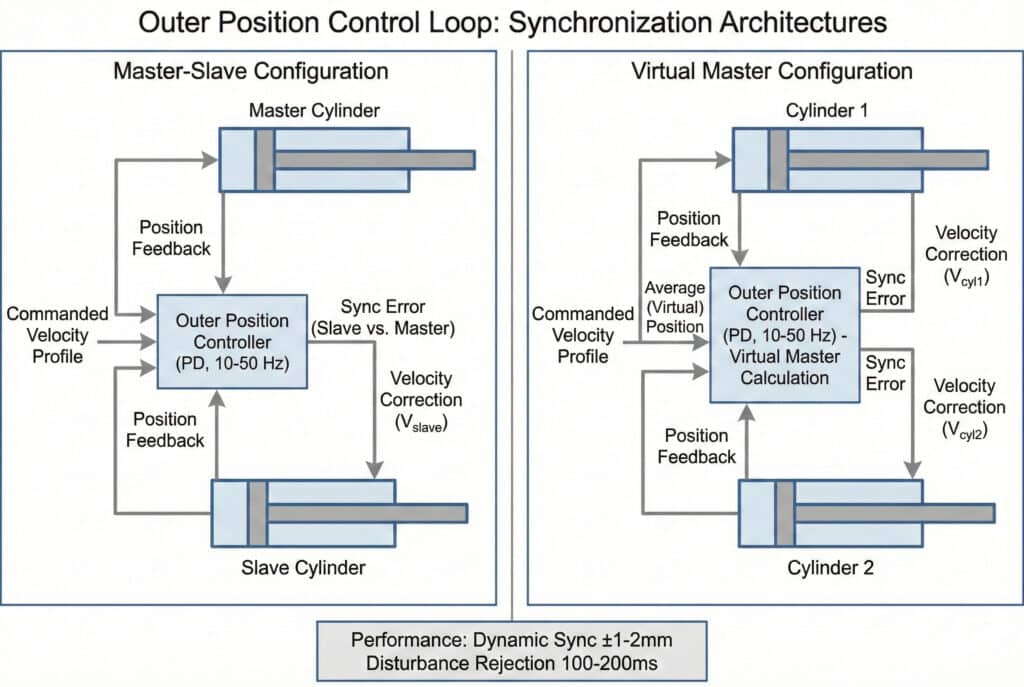
Sinhronizācijas arhitektūras
Galvenā-pakļautā konfigurācija
Viens cilindrs, kas apzīmēts kā “galvenais”:
- Meistars seko norādītajam ātruma profilam
- Slave cilindri pielāgo ātrumu, lai tas atbilstu master pozīcijai
- Vienkārša, paredzama uzvedība
- Trūkums: galvenā cilindra kļūdas izplatās uz pakārtotajiem cilindriem
Ātruma korekcija pakalpojuma lietotājam:
$$
V_{slave}
= V_{komandēts}
+ K_{p} \times (Pos_{galvenais} – Pos_{pakļautais})
+ K_{d} \times (Vel_{master} – Vel_{slave})
$$
Virtuālā galvenā konfigurācija
Vidējā pozīcija kļūst par atsauci:
- Virtuālā_pozīcija = (Poz_1 + Poz_2 + … + Poz_n) / n
- Visi cilindri pielāgojas, lai atbilstu virtuālajai pozīcijai
- Priekšrocība: izkliedē kļūdas pa visiem cilindriem
- Labāk piemērots sistēmām ar 3 un vairāk cilindriem
Ātruma korekcija katram cilindram:
$$
V_{cilindrs_i}
= V_{komandēts}
K_{p} \times (Pos_{virtual} – Pos_{cylinder_i})
$$
Sinhronizācijas kļūdu pārvaldība
Kļūdu robežas un piesātinājums
Ārējai cilpai jāietver robežas:
Maksimālā ātruma korekcija: ±30-50% no norādītā ātruma
- Novērš viena cilindra aizskriešanu
- Saglabā sistēmas stabilitāti
- Nodrošina, ka visi cilindri virzās uz priekšu
Kļūdas slieksnis trauksmei: 5–10 mm tipisks
- Pārsniedzot robežvērtību, izraisa kļūdas stāvokli
- Norāda uz mehānisku problēmu vai vadības kļūdu
- Novērš iekārtu bojājumus
Krustotās savienošanas stratēģijas
Uzlabotās sistēmas nodrošina cilindru savstarpēju savienojumu:
| Stratēģija | Apraksts | Sinhronizācijas uzlabošana | Sarežģītība |
|---|---|---|---|
| Neatkarīga kontrole | Katrs cilindrs tiek vadīts atsevišķi | Pamatlīnija | Zema |
| Galvenais-pakalpojums | Vergi seko saimniekam | 3-5 reizes labāks | Zema |
| Virtuālais meistars | Visi seko vidējai pozīcijai | 4-6 reizes labāks | Mērens |
| Pilnīga krusteniska savienošana | Katrs cilindrs ņem vērā visus pārējos | 5-8 reizes labāks | Augsts |
Ārējās cilpas regulēšana
Proporcionālais pastiprinājums (K_p):
- Nosaka, cik agresīvi cilindri koriģē sinhronizācijas kļūdas
- Pārāk zems: lēna korekcija, liela stabila kļūda
- Pārāk augsts: svārstības, cīņa starp cilindriem
- Tipisks diapazons: 0,5–2,0 (bez dimensijām)
Atvasinājuma pieaugums (K_d):
- Nodrošina amortizāciju, pamatojoties uz ātruma starpību
- Novērš pārsniegšanu, labojot kļūdas
- Tipisks diapazons: 0,1–0,5
Skaņošanas procedūra:
- Iestatiet K_d = 0, K_p = 0,5
- Ieviest 5 mm pozīcijas nobīdi starp cilindriem
- Palieliniet K_p, līdz korekcija notiek ātri bez svārstībām.
- Pievienojiet K_d, lai samazinātu pārsniegumu, ja nepieciešams
Darbības rādītāji
Labi noregulētas divkāršās cilpas sistēmas nodrošina:
- Statiskā sinhronizācija: ±0,5–1 mm miera stāvoklī
- Dinamiskā sinhronizācija: ±1–2 mm kustības laikā
- Traucējumu novēršana: Atgriezties sinhronizācijā 100–200 ms laikā
- Ātruma uzraudzība: ±3-5% starp cilindriem
Mūsu Bepto divkāršās cilpas sinhronizētās sistēmas ir uzstādītas vairāk nekā 150 instalācijās visā pasaulē, apstrādājot slodzes no 50 kg līdz 5000 kg ar gājiena garumu līdz 4 metriem. 🌍
Kādas ir īstenošanas prasības un labākā prakse?
Lai veiksmīgi sinhronizētu divkāršo cilpu, ir nepieciešama atbilstoša aparatūra, programmatūra un nodošana ekspluatācijā. 🛠️
Īstenošanai nepieciešams: augstas izšķirtspējas pozīcijas sensori uz katra cilindra (0,01–0,1 mm izšķirtspēja), proporcionālie vai servovārsti katram cilindram (20–50 ms reakcijas laiks), kontrolieris, kas spēj izpildīt 100+ Hz cilpu (rūpnieciskais dators vai augstas veiktspējas PLC), sinhronizēta sensora nolasīšana (1 ms robežās) un atbilstoša mehāniskā konstrukcija ar pietiekamu stingrību (dabiskā frekvence >20 Hz). Programmatūrai jāievieš abas kontroles cilpas ar atbilstošu filtrēšanu, pretuzkrāšanos un kļūdu noteikšanu. Kopējās sistēmas izmaksas ir $800-2000 par cilindru salīdzinājumā ar pamata pneimatisko kontroli.
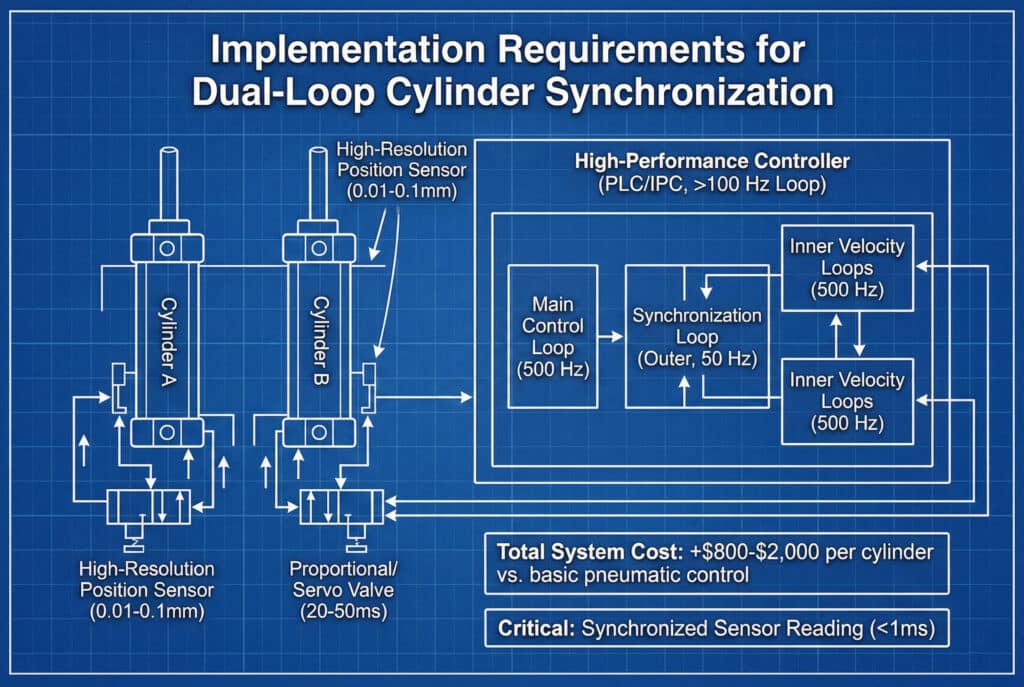
Aparatūras prasības
Pozīcijas sensori
| Sensora tips | Rezolūcija | Precizitāte | Izmaksas/cilindrs | Vislabāk piemērots |
|---|---|---|---|---|
| Magnētiskais lineārais kodētājs | 0,1 mm | ±0,2 mm | $150-300 | Vispārīgi lietojumi |
| Magnetostrictive | 0,01 mm | ±0,05 mm | $400-800 | Augstas precizitātes sistēmas |
| Optiskais lineārais mērogs | 0,001 mm | ±0,01 mm | $600-1,200 | Ultraprecizitāte (rets) |
| Vilkšanas vadu kodētājs | 0,1 mm | ±0,5 mm | $200-400 | Gari grūdieni (>2 m) |
Kritiskā prasība: Visi sensori jālasa sinhroni (1 ms laikā), lai izvairītos no kļūdainām sinhronizācijas kļūdām.
Vārstu izvēle
Proporcionālie vārsti ir minimālās prasības:
- Reakcijas laiks: <50 ms
- Izdzīvojamība: minimums 8 biti (vēlams 12 biti)
- Plūsmas jauda: atbilst cilindru diametram un vēlamajam ātrumam
- Elektriskā saskarne: 0–10 V vai 4–20 mA analogā ieeja
Servoventiļi augstas veiktspējas nodrošināšanai:
- Reakcijas laiks: <20 ms
- Izdzīvojamība: 12-16 bitu
- Vislabākā linearitāte un atkārtojamība
- Augstākas izmaksas: 2–3 reizes proporcionālie vārsti
Kontrolieru platformas izvēle
PLC bāzētas sistēmas
Priekšrocības:
- Pazīstama programmēšanas vide
- Integrēts ar mašīnas vadības sistēmu
- Izturīgs rūpnieciskais dizains
Prasības:
- Ātrdarbīgi analogie I/O moduļi (100+ Hz)
- Peldošā punkta matemātiskās iespējas
- Pietiekams skenēšanas laiks (<5 ms divkāršā cilpas vadībā)
Piemēroti PLC: Siemens S7-1500, Allen-Bradley ControlLogix, Beckhoff CX sērija
Rūpniecības datoru / kustības kontrolieris
Priekšrocības:
- Augstāka skaitļošanas jauda
- Ātrākas cilpas frekvences (iespējams 1 kHz+)
- Uzlaboti algoritmi, kas ir vieglāk īstenojami
Trūkumi:
- Sarežģītāka programmēšana
- Var būt nepieciešams atsevišķs drošības PLC
Programmatūras arhitektūra
Kontrolējošā cilpa struktūra
Galvenā vadības cilpa (500 Hz):
1. Nolasīt visus pozīcijas sensorus (sinhronizēti)
2. Aprēķiniet ātrumus (filtrēta diferenciācija)
Iekšējais cilindra gredzens (vienam cilindram):
3. Salīdziniet faktisko ātrumu ar iestatīto ātrumu
4. Aprēķiniet PI korekciju
5. Izvades vārsta komanda
Sinhronizācijas cilpa (50 Hz, ik pēc 10 cikliem):
6. Aprēķiniet sinhronizācijas kļūdas
7. Ģenerējiet ātruma korekcijas (PD kontrole)
8. Atjauniniet iekšējo cilpu ātruma iestatījumu vērtības
9. Pārbaudiet kļūdu robežas un defektus
Būtiskas programmatūras funkcijas
- Pretvējš5: Novērš integrālo terminu uzkrāšanos, kad ir sasniegti limiti
- Pāreja bez triecieniem: Plūstošas pārejas starp režīmiem (manuālais/automātiskais)
- Kļūdu noteikšana: Uzrauga sensora derīgumu, pārmērīgas kļūdas
- Datu reģistrēšana: Reģistrē pozīciju, ātrumu, kļūdas diagnostikas nolūkos
- Saskaņošanas interfeiss: Ļauj pielāgot parametrus bez atkārtotas kompilācijas
Labākā prakse ekspluatācijas uzsākšanā
1. solis: Mehāniska pārbaude
- Pārbaudiet cilindru stiprinājuma stingrību
- Pārbaudiet slodzes līdzsvaru (10% robežās)
- Nodrošiniet vienmērīgu kustību bez saķeršanās
2. solis: individuāla cilindru regulēšana
- Katru iekšējo ātruma cilpu regulējiet neatkarīgi
- Pirms sinhronizācijas pārbaudiet ±5% ātruma izsekošanu.
3. solis: sinhronizācijas cilpas regulēšana
- Sāciet ar zemiem ārējo cilpu pieaugumiem
- Pakāpeniski palieliniet, vienlaikus uzraugot stabilitāti
- Tests ar slodzes svārstībām un traucējumiem
4. solis: veiktspējas validācija
- Veiciet vairāk nekā 100 ciklus, mērot sinhronizācijas kļūdu
- Pārbaudiet, vai kļūda atbilst specifikācijām
- Dokumenta galīgie parametri
Bieži sastopamas īstenošanas kļūdas
| Kļūda | Sekas | Risinājums |
|---|---|---|
| Nesinhronizēts sensora rādījums | Viltus sinhronizācijas kļūdas | Izmantojiet aparatūras izraisītu vienlaicīgu paraugu ņemšanu |
| Nepietiekama filtrēšana | Trokšņaini ātruma signāli | Pievienojiet atbilstošu zemfrekvences filtru (10–20 ms) |
| Ārējā cilpa pārāk ātra | Cīņa ar iekšējo cilpu | Ārējā cilpa ≤ 1/5 iekšējās cilpas ātruma |
| Nav ātruma priekšapgādes | Lēna reakcija | Pievienot priekšējo vadību, pamatojoties uz komandēto ātrumu |
| Mehānisko problēmu ignorēšana | Slikta veiktspēja, neskatoties uz regulēšanu | Vispirms novēršiet saistību, nelīdzsvarotību vai elastīgumu |
Reāls veiksmes stāsts
Marija, automatizācijas inženiere stikla apstrādes rūpnīcā Toledo, Ohaio, vairākas nedēļas centās sinhronizēt trīs Bepto bezstieņu cilindrus, kas atbalsta 3 metrus platu konveijeru. Neskatoties uz plašu regulēšanu, viņas sistēma rādīja 8 mm sinhronizācijas kļūdas. Kad mūsu tehniskā komanda pārskatīja viņas īstenoto risinājumu, mēs atklājām:
- Sensoru rādījumi netika sinhronizēti (50 ms nobīde)
- Ārējā cilpa darbojās ar tādu pašu ātrumu kā iekšējā cilpa (nestabilitāte)
- Nav ātruma filtrēšanas (pārmērīgs troksnis)
Pēc mūsu ieteiktās arhitektūras ieviešanas ar sinhronizētiem 100 Hz iekšējiem cikliem un 20 Hz ārējiem cikliem, viņas sistēma sasniedza ±1,3 mm sinhronizāciju, kas atbilst viņas ±2 mm specifikācijai ar rezervi. 🎉
Secinājums
Divkāršās cilpas vadības stratēģijas pārveido pneimatisko cilindru sinhronizāciju no neuzticama izaicinājuma par precīzu, atkārtojamu procesu, ļaujot izmantot lietojumus, kas prasa koordinētu daudzcilindru kustību, vienlaikus izmantojot pneimatiskās vadības izmaksu un vienkāršības priekšrocības salīdzinājumā ar dārgām elektriskajām servosistēmām. 💪
FAQ par divkāršās cilpas sinhronizācijas kontroli
J: Vai es varu panākt labu sinhronizāciju, izmantojot tikai pozīcijas cilpu (bez ātruma cilpas)?
Vienkāršā pozīcijas kontrole var sasniegt ±3–8 mm sinhronizāciju lēni kustīgām sistēmām (<0,5 m/s), bet nevar tikt galā ar ātrāku kustību pneimatiskās kavēšanās un vārstu reakcijas aizkavēšanās dēļ. Iekšējā ātruma cilpa nodrošina ātru reakciju, kas nepieciešama traucējumu novēršanai un vienmērīgai kustībai. Lietojumiem, kur nepieciešama precizitāte, kas labāka par ±5 mm, vai ātrums virs 0,5 m/s, stingri ieteicama divkāršā kontrole — veiktspējas uzlabojums attaisno nelielu sarežģītības pieaugumu.
J: Cik daudz cilindru var sinhronizēt ar divkāršo cilpu vadību?
Mēs esam veiksmīgi ieviesuši sistēmas ar 2–6 cilindriem, izmantojot divkāršo cilpu vadību. Sistēmas ar 2–3 cilindriem ir vienkāršas; 4–6 cilindriem nepieciešama sarežģītāka savstarpējā savienošana un lielāka skaitļošanas jauda. Ja cilindru skaits pārsniedz 6, apsveriet iespēju sadalīt tos vairākās sinhronizētās grupās. Ierobežojošie faktori ir kontroliera skaitļošanas jauda un mehāniskā sarežģītība, lai saglabātu stingrību daudzos savienojuma punktos, nevis pats vadības algoritms.
J: Kas notiek, ja darbības laikā viens pozīcijas sensors nedarbojas?
Pareiza kļūdu noteikšana ir jāatpazīst sensora darbības traucējumi (signāls ārpus diapazona, neiespējama ātruma vai iesaldēta rādījuma) un jāizraisa visu cilindru kontrolēta apstāšanās. Dažas modernas sistēmas var turpināt darboties ierobežotā režīmā, izmantojot atlikušos sensorus, bet tas prasa rūpīgu drošības analīzi. Bepto iesaka izmantot rezerves sensorus kritiskām lietojumprogrammām vai ieviest diferenciālā spiediena sensoru kā rezerves gājiena beigšanas noteikšanas metodi.
J: Vai divkāršā cilpa darbojas ar standarta ieslēgšanas/izslēgšanas vārstiem vai man ir nepieciešami proporcionālie vārsti?
Divkāršā cilpa kontrolei nepieciešami proporcionālie vai servoventiļi, lai nepārtraukti modulētu cilindru ātrumu — standarta ieslēgšanas/izslēgšanas ventiļi nespēj nodrošināt nepieciešamo mainīgo plūsmas kontroli. Tomēr ātrās ieslēgšanas/izslēgšanas ventiļu PWM (impulsa platuma modulācija) kontrole var tuvināties proporcionālajai kontrolei par 60–80% no izmaksām. Budžeta ziņā ierobežotām lietojumprogrammām PWM ar divkāršās cilpas vadību nodrošina labus rezultātus (±2–4 mm sinhronizācija), lai gan tie neatbilst īstai proporcionālās vārstu darbībai (±0,5–2 mm).
J: Kā rīkoties, ja slodze ir nevienmērīgi sadalīta un viens cilindrs nes lielāku slodzi nekā pārējie?
Līdz 20-30% lielas slodzes nelīdzsvarotības tiek automātiski risinātas ar divkāršā cilpa kontrolieri — iekšējā ātruma cilpa regulē vārsta pozīciju, lai saglabātu vienādu ātrumu neatkarīgi no slodzes atšķirībām. Lielākas nelīdzsvarotības gadījumā (>30%) apsveriet: mehānisku slodzes izlīdzināšanu (regulējiet montāžas punktus), priekšējo kompensāciju (pievienojiet slodzes atkarīgu vārsta nobīdi) vai individuālu spiediena kontroli (regulējiet piegādes spiedienu katram cilindram). Mūsu Bepto inženieru komanda var analizēt jūsu konkrēto slodzes sadalījumu un ieteikt optimālo pieeju jūsu lietojumam.
-
Gaisa īpašība, kas ļauj tā tilpumam mainīties atkarībā no spiediena, radot kavējumus un nelinearitāti pneimatiskajās sistēmās. ↩
-
Robusta pozīcijas noteikšanas tehnoloģija, kas izmanto magnētisko lauku un deformācijas impulsu mijiedarbību, lai izmērītu attālumu. ↩
-
Aprēķinu process, kurā tiek novērtēts ātrums, aprēķinot pozīcijas izmaiņas noteiktā laika intervālā. ↩
-
Proaktīva kontroles tehnika, kas pielāgo sistēmu, balstoties uz atsauces signālu vai traucējumiem, pirms tie ietekmē rezultātu. ↩
-
Mehānisms, kas novērš PID regulatora integrālās daļas pārmērīgas kļūdas uzkrāšanos, kad aktuators ir piesātināts. ↩
