

Uvod
Ali vaš večcilindrični sistem trpi zaradi sinhronizacijskih napak, ki povzročajo zatikanje, poškodbe izdelkov ali varnostna tveganja? 😰 Ko se morata dva ali več pnevmatskih cilindrov premikati skupaj – dvigovanje težkih bremen, vodenje širokih plošč ali usklajevanje zapletenih gibov – že majhne razlike v položaju povzročajo resne težave. Tradicionalni pnevmatski sistemi z odprto zanko preprosto ne morejo ohraniti tesne sinhronizacije, ki jo zahteva sodobna proizvodnja.
Strategije dvojnega zanka uporabljajo dva vgrajena povratna zanka za sinhronizacijo več pnevmatskih valjev: notranji zanko hitrosti, ki nadzira hitrost posameznega valja s proporcionalno modulacijo ventila, in zunanji zanko položaja, ki primerja položaje valjev in prilagaja nastavljene vrednosti hitrosti, da se zmanjša napaka sinhronizacije. Ta arhitektura običajno doseže natančnost sinhronizacije od ±0,5 mm do ±2 mm pri dolžinah hodov do 3 metre, v primerjavi z ±10–50 mm pri osnovnih pnevmatskih sistemih.
V zadnjem četrtletju sem sodeloval s Stevenom, strojnim inženirjem v tovarni sončnih panelov v Phoenixu, Arizona. Njegov dvo-cilindrični portalni sistem za ravnanje z 2-metrskimi steklenimi paneli je imel 15-milimetrske sinhronizacijske napake, ki so povzročile poškodbe panelov v vrednosti $8.000 na mesec. Po uvedbi dvojnega krmiljenja na njegovem sistemu brezstebrnih valjev Bepto se je sinhronizacija izboljšala na ±1,2 mm, poškodbe so se zmanjšale na skoraj nič, pretok pa se je povečal za 12% zaradi hitrejših varnih delovnih hitrosti. Naj pojasnim, kako deluje ta močna strategija krmiljenja. 🎯
Kazalo vsebine
- Kaj so strategije dvojnega zanka in zakaj so potrebne?
- Kako notranja hitrostna zanka nadzira hitrost posameznega valja?
- Kako zunanja pozicijska zanka ohranja sinhronizacijo?
- Kakšne so zahteve za izvajanje in najboljše prakse?
Kaj so strategije dvojnega zanka in zakaj so potrebne?
Razumevanje izziva sinhronizacije razkriva, zakaj je sofisticirano upravljanje bistvenega pomena. ⚙️
Dvojni krog nadzora rešuje temeljni problem, da pnevmatski cilindri zaradi razlik v trenju, neravnovesja obremenitve, razlik v dovodnem tlaku in podobno naravno delujejo z različnimi hitrostmi. stisljivost zraka1. Dvojna zanka ločuje nadzor hitrosti (notranja zanka deluje pri 100–500 Hz) od sinhronizacije položaja (zunanja zanka pri 10–50 Hz), kar omogoča hiter odziv na motnje ob ohranjanju usklajenega gibanja. Ta hierarhični pristop je 5- do 10-krat boljši od enojnih zank v smislu natančnosti sinhronizacije.

Izziv sinhronizacije
Zakaj se pnevmatski cilindri ne sinhronizirajo naravno
Celo “identični” valji se obnašajo različno zaradi:
- Sprememba trenja: obraba tesnila, razlike v mazanju (±10-30% razlika v sili)
- Neuravnotežena obremenitev: Premik težišča, neenakomerna porazdelitev teže
- Razlike v tlaku dovoda: Neenake dolžine linij, omejitve pretoka
- Stisljivost zraka: Vpliv temperature in vlažnosti na gostoto zraka
- Proizvodne tolerance: Premer izvrtine, dimenzije tesnila (tipično ±0,05 mm)
Ti dejavniki povzročajo razlike v hitrosti med cilindri v višini 5–201 TP3T, kar povzroča napake v položaju, ki se kopičijo skozi dolžino hod.
Arhitektura z enim krogom v primerjavi z arhitekturo z dvojnim krogom
| Arhitektura nadzora | Natančnost sinhronizacije | Odzivni čas | Kompleksnost | Stroški |
|---|---|---|---|---|
| Odprta zanka (brez povratne informacije) | ±10–50 mm | NI RELEVANTNO | Zelo nizko | Zelo nizko |
| Enopostavna zanka | ±3-8 mm | 100-300 ms | Nizka | Nizka |
| Dvojna zanka (hitrost + položaj) | ±0,5-2 mm | 20-80 ms | Zmerno | Zmerno |
| Triple-Loop (dodaja silo) | ±0,2–1 mm | 10-50 ms | Visoka | Visoka |
Hierarhija krmilnih zank
Zunanji krog (sinhronizacija položaja):
- Primerja položaje vseh valjev
- Izračuna napako sinhronizacije
- Prilagaja nastavljene vrednosti hitrosti za vsak valj
- Hitrost posodabljanja: 10–50 Hz (vsakih 20–100 ms)
Notranji krog (nadzor hitrosti):
- Nadzoruje hitrost posameznih valjev
- Modulira proporcionalni položaj ventila
- Odziva se na nastavljeno vrednost hitrosti iz zunanjega kroga
- Hitrost posodabljanja: 100–500 Hz (vsakih 2–10 ms)
Ta ločitev nalog omogoča, da se vsaka zanka optimizira za svojo specifično nalogo – hitra notranja zanka obdeluje dinamični odziv, medtem ko počasnejša zunanja zanka ohranja koordinacijo. 🔄
Matematična fundacija
Napaka položaja med cilindri je:
$$
Sinhronizacija_{Napaka}
= \left| Položaj_{Cilinder1} – Položaj_{Cilinder2} \right|
$$
Zunanji krog ustvarja popravke hitrosti:
$$
Hitrost_{Popravek}
= K_{p} \times Sinhronizacija_{Napaka}
+ K_{d} \times \left( \frac{dError}{dt} \right)
$$
Kjer je K_p sorazmerni dobiček in K_d derivativni dobiček (tipično za PD krmilnik).
V podjetju Bepto smo razvili vnaprej nastavljene kontrolne parametre za pogoste sinhronizacijske aplikacije, s čimer smo skrajšali čas zagona s dni na ure in hkrati zagotovili stabilno in natančno delovanje.
Kako notranja hitrostna zanka nadzira hitrost posameznega valja?
Notranji krog zagotavlja hiter in natančen nadzor hitrosti, ki omogoča sinhronizacijo. 🚀
Notranja hitrostna zanka uporablja senzor položaja (linearni kodirnik ali magnetostriktivni2) za izračun hitrosti valja v realnem času skozi numerična diferenciacija3, to primerja z nastavljeno vrednostjo hitrosti iz zunanjega kroga in prilagodi proporcionalni ali servo ventil, da se zmanjša napaka hitrosti. Ta krog deluje pri 100–500 Hz z algoritmi PI ali PID in doseže natančnost hitrosti v območju ±2–5% ter se odzove na motnje v 10–30 ms, kar zagotavlja stabilno podlago za nadzor hitrosti, potrebno za sinhronizacijo.
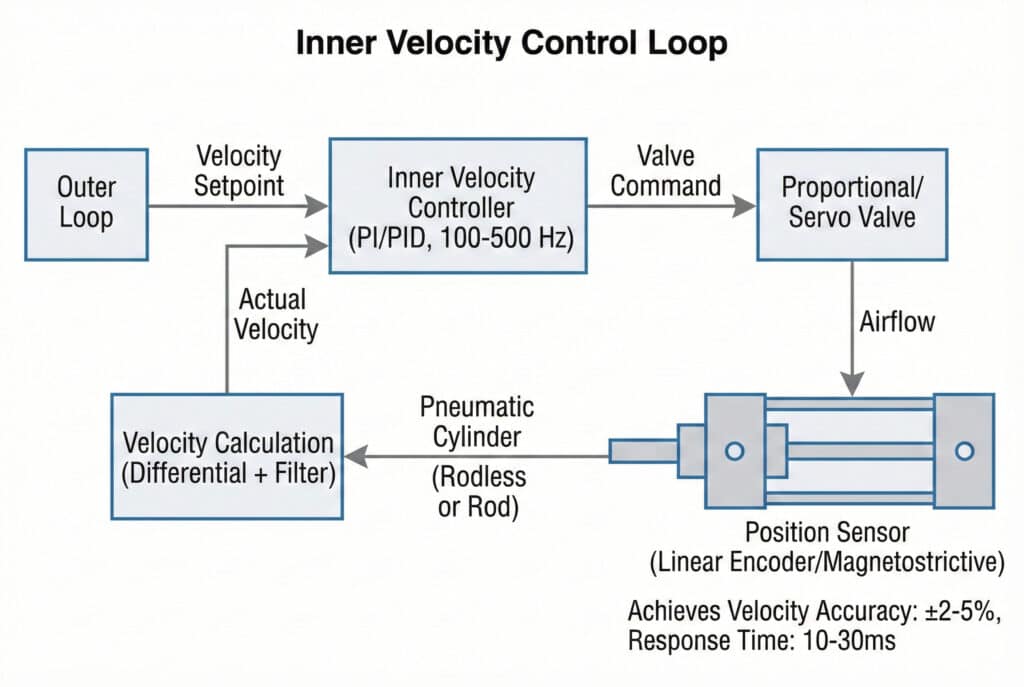
Tehnike merjenja hitrosti
Neposredni izračun hitrosti
Večina sistemov izračuna hitrost na podlagi povratnih informacij o položaju:
$$
Hitrost
= \frac{Položaj_{trenutni} – Položaj_{prejšnji}}{Vzorec_{Čas}}
$$
Za 100 Hz krmilni krog (čas vzorčenja 10 ms):
- Sprememba položaja za 1 mm = hitrost 100 mm/s
- Ločljivost senzorja položaja 0,01 mm = ločljivost hitrosti 1 mm/s
Zahteve za filtriranje
Izračuni surove hitrosti so hrupni zaradi:
- Kvantizacija senzorja položaja
- Mehanske vibracije
- Električni šum
Nizkoprepustno filtriranje izravnava signal:
- Filter prvega reda: preprost, tipična časovna konstanta 5–20 ms
- Drseče povprečje: 3–10 vzorčno okno
- Kalmanov filter: optimalen, a zapleten
Časovna konstanta filtra mora biti hitrejša od odziva krmilne zanke (običajno 1/5 do 1/10 pasovne širine zanke).
Strategije za nadzor ventilov
Proporcionalna modulacija ventila
Regulator hitrosti izda ukaz ventilu (običajno 0–10 V ali 4–20 mA):
$$
Ventil_{Poveljstvo}
= Predhodno povratno + PI_{Korekcija}
$$
Napredna4 komponenta: Glede na želeno hitrost in obremenitev (izboljša odzivnost)
PI popravek: Odpravlja napako v stabilnem stanju
| Vrsta ventila | Odzivni čas | Resolucija | Stroški | Najboljša aplikacija |
|---|---|---|---|---|
| Proporcionalno usmerjeno | 20-50 ms | 8–12 bitov | Srednja | Splošna sinhronizacija |
| Servo ventil | 5-15 ms | 12–16 bitov | Visoka | Visoko precizni sistemi |
| Digitalno krmiljenje s PWM | 10–30 ms | 8-10 bitov efektivnih | Nizka | Cenovno občutljive aplikacije |
Nastavitev notranjega kroga
Korak 1: Proporcionalni dobiček (K_p)
- Začnite z nizkim dobičkom (K_p = 0,1)
- Povečajte, dokler sistem ne odzove hitro brez nihanja.
- Tipični razpon: 0,5–2,0 za nadzor hitrosti
Korak 2: Integralni dobiček (K_i)
- Dodajte integralno delovanje za odpravo napake v stabilnem stanju.
- Začnite z zelo nizko vrednostjo (K_i = 0,01)
- Tipični razpon: 0,05–0,3
Korak 3: Derivativni dobiček (K_d) (neobvezno)
- Dodaja dušenje za sisteme s prekoračitvijo
- Pogosto nepotrebno za pnevmatsko regulacijo hitrosti
- Uporabite samo, če je potrebno: 0,01–0,1
Delovanje v realnem okolju
Proizvajalec pakirnih strojev v Atlanti, Georgia, je vgradil notranje hitrostne zanke na štiri sinhronizirane brezstebrne valje Bepto. Pred nastavitvijo se je hitrost med valji spreminjala za ±15%. Po ustrezni nastavitvi notranje zanke:
- Napaka sledenja hitrosti: ±3% nastavljene vrednosti
- Odziv na motnje obremenitve: 25 ms
- Nihanje hitrosti: <2% (enakomerno gibanje)
- Osnova za sinhronizacijo: omogočena natančnost zunanjega kroga ±1,5 mm ✅
Kako zunanja pozicijska zanka ohranja sinhronizacijo?
Zunanji krog usklajuje več valjev s prilagajanjem njihovih nastavljenih vrednosti hitrosti. 🎛️
Zunanja pozicijska zanka izvaja arhitekturo glavni-podrejeni ali virtualni glavni: neprekinjeno primerja položaje valjev, izračuna sinhronizacijsko napako za vsak podrejeni valj glede na glavni (ali povprečni položaj) in prilagaja posamezne nastavljene vrednosti hitrosti, da se napaka zmanjša na minimum. Ta zanka, ki deluje pri 10–50 Hz s PD-krmiljenjem (proporcionalno-derivativnim), ustvarja popravke hitrosti ±10–50%, ki valje ponovno poravnajo v 50–200 ms po motnjah in ohranjajo sinhronizacijo skozi celoten hod.
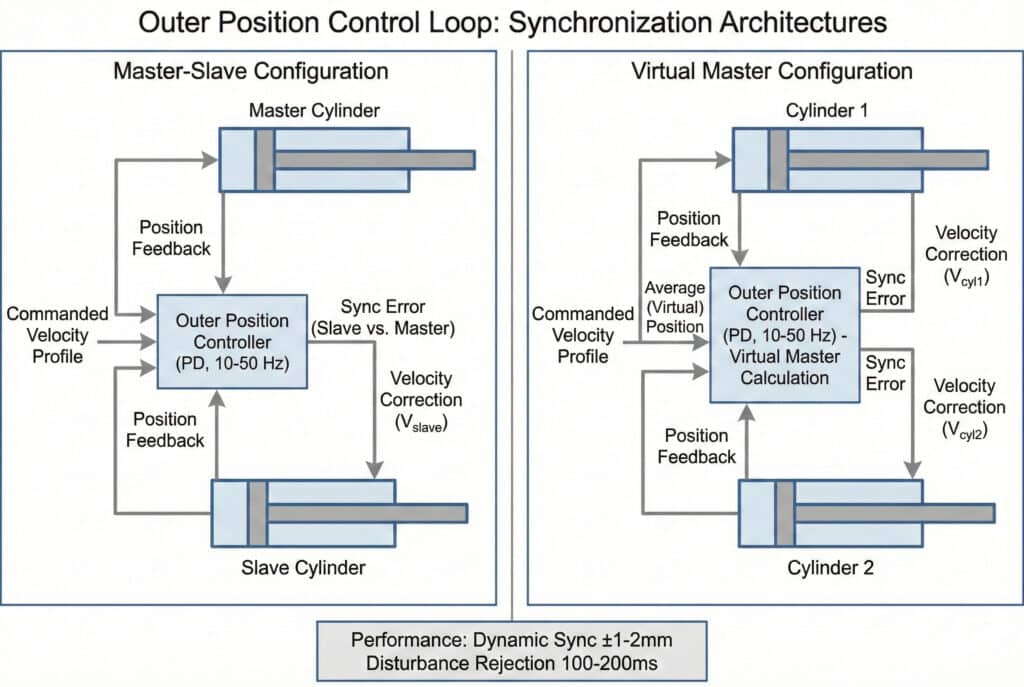
Arhitekture sinhronizacije
Konfiguracija gospodar-suženj
En valj, označen kot “glavni”:
- Glavni motor sledi predpisanemu profilu hitrosti
- Podrejeni cilindri prilagajajo hitrost, da se ujemajo z glavnim položajem.
- Preprosto, predvidljivo vedenje
- Pomanjkljivost: napake glavnega valja se prenašajo na podrejen valje
Popravek hitrosti za podrejeni sistem:
$$
V_{suženj}
= V_{ukazano}
+ K_{p} \times (Pos_{master} – Pos_{slave})
+ K_{d} \times (Vel_{master} – Vel_{slave})
$$
Konfiguracija virtualnega glavnega računalnika
Povprečna pozicija postane referenčna:
- Virtualna_položaj = (Položaj_1 + Položaj_2 + … + Položaj_n) / n
- Vsi cilindri se prilagodijo, da ustrezajo virtualnemu položaju.
- Prednost: razporedi napake po vseh valjih
- Boljše za sisteme s 3 ali več cilindri
Popravek hitrosti za vsak valj:
$$
V_{cilinder_i}
= V_{ukazano}
K_{p} \times (Pos_{virtual} – Pos_{cilinder_i})
$$
Upravljanje napak sinhronizacije
Meje napak in nasičenost
Zunanji krog mora vključevati omejitve:
Popravek največje hitrosti: ±30–50% zahtevane hitrosti
- Preprečuje, da bi en valj ušel
- Ohranja stabilnost sistema
- Zagotavlja, da se vsi valji premikajo naprej.
Prag napake za alarm: tipično 5–10 mm
- Povzroči napako, če je presežena
- Označuje mehansko okvaro ali okvaro krmiljenja.
- Preprečuje poškodbe opreme
Strategije navzkrižnega povezovanja
Napredni sistemi izvajajo medsebojno povezovanje med cilindri:
| Strategija | Opis | Izboljšanje sinhronizacije | Kompleksnost |
|---|---|---|---|
| Neodvisni nadzor | Vsak valj se upravlja ločeno | Osnovni | Nizka |
| Glavni-podrejeni | Sužnji sledijo gospodarju | 3-5× boljši | Nizka |
| Virtualni mojster | Vsi sledijo povprečni poziciji | 4-6× boljši | Zmerno |
| Polna navzkrižna vezava | Vsak valj upošteva vse ostale | 5-8× boljši | Visoka |
Nastavitev zunanjega kroga
Proporcionalni dobiček (K_p):
- Določa, kako agresivno cilindri popravljajo napake sinhronizacije.
- Premajhna: počasna korekcija, velika napaka v stabilnem stanju
- Previsoka: nihanje, boj med cilindri
- Tipični razpon: 0,5–2,0 (brez dimenzije)
Derivativni dobiček (K_d):
- Zagotavlja dušenje na podlagi razlike v hitrosti
- Preprečuje prekoračitev pri popravljanju napak
- Tipični razpon: 0,1–0,5
Postopek nastavitve:
- Nastavi K_d = 0, K_p = 0,5
- Uvedite 5 mm odmik med cilindri
- Povečajte K_p, dokler popravek ni hiter brez nihanja.
- Dodajte K_d, da po potrebi zmanjšate prekoračitev.
Merila uspešnosti
Dobro nastavljeni sistemi z dvojnim zankom dosežejo:
- Statična sinhronizacija: ±0,5–1 mm v mirovanju
- Dinamična sinhronizacija: ±1–2 mm med gibanjem
- Odklanjanje motenj: Vrnitev k sinhronizaciji v 100–200 ms
- Sledenje hitrosti: ±3-5% med cilindri
Naši sinhronizirani sistemi Bepto z dvojno zanko so bili nameščeni v več kot 150 napravah po vsem svetu, kjer obdelujejo obremenitve od 50 kg do 5000 kg z dolžino hodov do 4 metre. 🌍
Kakšne so zahteve za izvajanje in najboljše prakse?
Za uspešno sinhronizacijo z dvojnim zankom so potrebni ustrezna strojna oprema, programska oprema in zagon. 🛠️
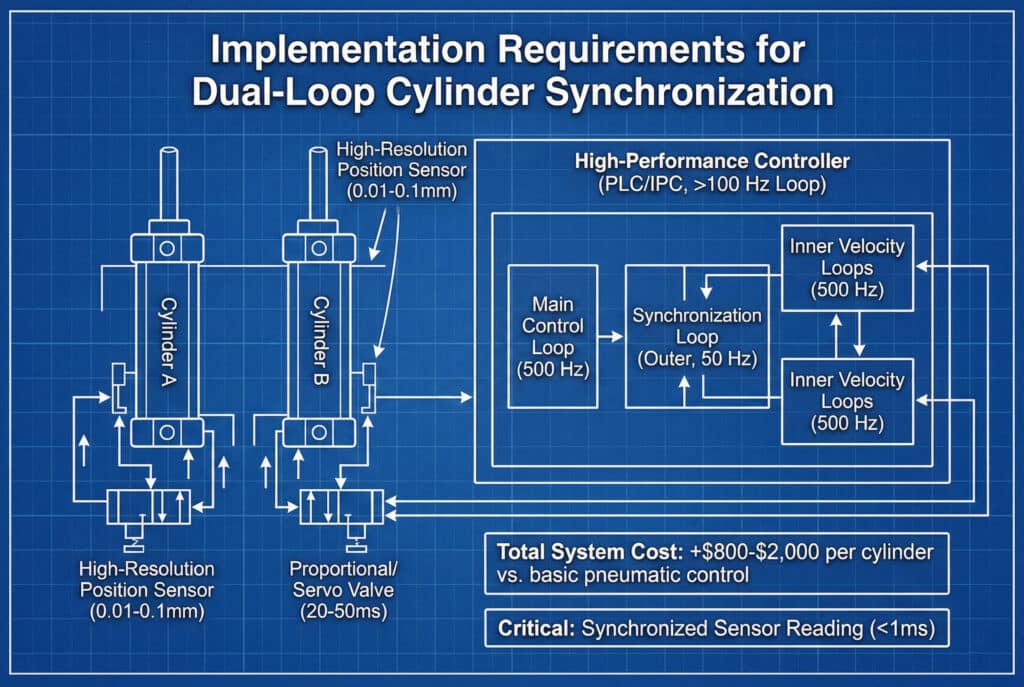
Za izvedbo so potrebni: visokoločljivostni senzorji položaja na vsakem valju (ločljivost 0,01–0,1 mm), proporcionalni ali servo ventili za vsak valj (odzivni čas 20–50 ms), krmilnik, ki omogoča izvajanje zanke s frekvenco nad 100 Hz (industrijski računalnik ali visoko zmogljiv PLC), sinhronizirano odčitavanje senzorjev (v roku 1 ms) in ustrezna mehanska zasnova z zadostno togostjo (lastna frekvenca >20 Hz). Programska oprema mora izvajati obe krmilni zanke z ustreznim filtriranjem, zaščito pred navijanjem in zaznavanjem napak. Skupni stroški sistema znašajo $800–2000 na valj v primerjavi z osnovnim pnevmatskim krmiljenjem.
Zahteve za strojno opremo
Senzorji položaja
| Tip senzorja | Resolucija | Natančnost | Stroški/cilinder | Najboljši za |
|---|---|---|---|---|
| Magnetni linearni kodirnik | 0,1 mm | ±0,2 mm | $150-300 | Splošne aplikacije |
| Magnetostrikcijski | 0,01 mm | ±0,05 mm | $400-800 | Visoko precizni sistemi |
| Optična linearna skala | 0,001 mm | ±0,01 mm | $600-1,200 | Ultra-natančnost (redko) |
| Enkoder z vlečnim žičnim senzorjem | 0,1 mm | ±0,5 mm | $200-400 | Dolgi zamahi (>2 m) |
Ključna zahteva: Vsi senzorji morajo biti odčitani sinhrono (v roku 1 ms), da se izognemo napačnim sinhronizacijskim napakam.
Izbira ventilov
Proporcionalni ventili so minimalne zahteve:
- Odzivni čas: <50 ms
- Ločljivost: najmanj 8-bitna (zaželeno 12-bitna)
- Pretok: Ujemanje med premerom valja in želeno hitrostjo
- Električni vmesnik: analogni vhod 0–10 V ali 4–20 mA
Servo ventili za visoko zmogljivost:
- Odzivni čas: <20 ms
- Ločljivost: 12–16 bitov
- Vrhunska linearnost in ponovljivost
- Višji stroški: 2-3× proporcionalni ventili
Izbira platforme krmilnika
Sistemi na osnovi PLC
Prednosti:
- Znano programsko okolje
- Integriran z nadzorom stroja
- Robustna industrijska zasnova
Zahteve:
- Visokohitrostni analogni I/O moduli (100+ Hz)
- Zmožnost izračunavanja s plavajočo vejico
- Dovolj časa za skeniranje (<5 ms za dvojno zanko krmiljenja)
Primerni PLC-ji: Siemens S7-1500, Allen-Bradley ControlLogix, Beckhoff CX serija
Industrijski računalnik / krmilnik gibanja
Prednosti:
- Večja računska moč
- Hitrejše hitrosti zanke (možno 1 kHz+)
- Napredni algoritmi, ki so lažji za implementacijo
Slabosti:
- Bolj zapleteno programiranje
- Lahko zahteva ločen varnostni PLC
Arhitektura programske opreme
Struktura krmilne zanke
Glavna krmilna zanka (500 Hz):
1. Preberite vse senzorje položaja (sinhronizirani)
2. Izračunajte hitrosti (filtrirano diferenciacijo)
Notranji obroč (na valj):
3. Primerjava dejanske in nastavljene hitrosti
4. Izračunajte PI popravek
5. Ukaz izhodnega ventila
Sinhronizacijski krog (50 Hz, vsak 10. cikel):
6. Izračunajte napake sinhronizacije
7. Ustvarjanje popravkov hitrosti (PD krmiljenje)
8. Posodobite nastavitve hitrosti za notranje zanke
9. Preverite omejitve napak in napake
Osnovne funkcije programske opreme
- Proti navijanju5: Preprečuje kopičenje integralnega člena, ko je na mejah
- Prenos brez tresenja: Gladki prehodi med načini (ročno/avtomatsko)
- Odkrivanje napak: Nadzoruje veljavnost senzorja, prekomerne napake
- Beleženje podatkov: Zapisuje položaj, hitrost, napake za diagnostiko
- Vmesnik za nastavljanje: Omogoča prilagajanje parametrov brez ponovnega prevajanja.
Najboljše prakse pri zagonu
Korak 1: Mehanska preveritev
- Preverite trdnost pritrditve valja
- Preveri uravnoteženost obremenitve (znotraj 10%)
- Zagotovite nemoteno gibanje brez zatikanja
Korak 2: Individualno nastavljanje valja
- Nastavite vsako notranjo hitrostno zanko neodvisno
- Preverite sledenje hitrosti ±5% pred sinhronizacijo.
Korak 3: Nastavitev sinhronizacijskega zanka
- Začnite z nizkimi zunanjimi zankami
- Postopoma povečujte, medtem ko spremljate stabilnost.
- Testiranje z nihanji obremenitve in motnjami
Korak 4: Preverjanje učinkovitosti
- Izvedite več kot 100 ciklov merjenja napake sinhronizacije.
- Preverite, ali napaka ostaja v okviru specifikacij.
- Končni parametri dokumenta
Pogoste napake pri izvajanju
| Napaka | Posledice | Rešitev |
|---|---|---|
| Nesinhronizirano odčitavanje senzorja | Napačne napake sinhronizacije | Uporabi hkratno vzorčenje, sproženo s strojno opremo |
| Nezadostno filtriranje | Hrupni signali hitrosti | Dodajte ustrezen nizkoprepustni filter (10–20 ms). |
| Zunanji krog prehiter | Boj z notranjo zanko | Zunanji krog ≤ 1/5 hitrosti notranjega kroga |
| Brez predhodnega prenosa hitrosti | Počasen odziv | Dodaj predhodno povratno informacijo na podlagi ukazane hitrosti |
| Ignoriranje mehanskih težav | Slaba zmogljivost kljub nastavitvi | Najprej popravite vezanje, neravnovesje ali prožnost. |
Zgodba o uspehu v resničnem svetu
Maria, inženirka za avtomatizacijo v obratu za predelavo stekla v Toledu, Ohio, se je več tednov trudila sinhronizirati tri brezstebrne valje Bepto, ki podpirajo 3 metre širok transportni trak. Njen sistem je kljub obsežnemu nastavljanju kazal 8 mm sinhronizacijske napake. Ko je naša tehnična ekipa pregledala njeno izvedbo, smo ugotovili:
- Odčitki senzorjev niso bili sinhronizirani (50 ms zamik)
- Zunanji krog je deloval z enako hitrostjo kot notranji krog (nestabilnost)
- Brez filtriranja hitrosti (prekomeren hrup)
Po implementaciji naše priporočene arhitekture s sinhroniziranimi notranjimi zankami 100 Hz in zunanjo zanko 20 Hz je njen sistem dosegel sinhronizacijo ±1,3 mm, kar je z rezervo izpolnilo njeno specifikacijo ±2 mm. 🎉
Zaključek
Strategije dvojnega krmiljenja spreminjajo sinhronizacijo pnevmatskih valjev iz nezanesljivega izziva v natančen, ponovljiv proces, kar omogoča aplikacije, ki zahtevajo usklajeno gibanje več valjev, hkrati pa izkoriščajo prednosti pnevmatskega pogona v smislu stroškov in enostavnosti v primerjavi z dragimi električnimi servosistemi. 💪
Pogosta vprašanja o nadzoru sinhronizacije z dvojno zanko
V: Ali lahko dosežem dobro sinhronizacijo samo s pozicijsko zanko (brez hitrostne zanke)?
Enokrožno krmiljenje položaja lahko doseže sinhronizacijo ±3–8 mm za počasi premikajoče se sisteme (<0,5 m/s), vendar ima težave pri hitrejšem gibanju zaradi pnevmatskega zamika in zamikov odziva ventila. Notranji krog hitrosti zagotavlja hiter odziv, potreben za odpravo motenj in nemoteno gibanje. Za aplikacije, ki zahtevajo natančnost boljšo od ±5 mm ali hitrosti nad 0,5 m/s, se močno priporoča dvojno krmiljenje – izboljšanje zmogljivosti upravičuje zmerno povečanje kompleksnosti.
V: Koliko valjev je mogoče sinhronizirati z dvojnim krmiljenjem zanke?
Uspešno smo implementirali sisteme z 2–6 cilindri z uporabo dvojnega krmiljenja. Sistemi z 2–3 cilindri so preprosti; sistemi z 4–6 cilindri zahtevajo bolj sofisticirano medsebojno povezovanje in večjo računalniško moč. Pri več kot 6 cilindrih razmislite o razdelitvi na več sinhroniziranih skupin. Omejevalni dejavniki so računalniška zmogljivost krmilnika in mehanska kompleksnost ohranjanja togosti na številnih povezovalnih točkah – ne pa sam krmilni algoritem.
V: Kaj se zgodi, če med delovanjem odpove en senzor položaja?
Pravilno zaznavanje napak mora takoj prepoznati okvaro senzorja (signal izven območja, nemogoča hitrost ali zamrznjena vrednost) in sprožiti nadzorovano zaustavitev vseh valjev. Nekateri napredni sistemi lahko nadaljujejo delovanje v omejenem načinu z uporabo preostalih senzorjev, vendar to zahteva skrbno varnostno analizo. V podjetju Bepto priporočamo redundantne senzorje za kritične aplikacije ali uvedbo zaznavanja diferenčnega tlaka kot rezervne metode zaznavanja konca hod.
V: Ali dvojni krmilni krog deluje s standardnimi ventili za vklop/izklop ali potrebujem proporcionalne ventile?
Dvojni krog nadzora zahteva proporcionalne ali servo ventile za neprekinjeno moduliranje hitrosti valja – standardni ventili za vklop/izklop ne morejo zagotoviti potrebnega spremenljivega nadzora pretoka. Vendar pa lahko PWM (pulzno širinska modulacija) nadzor hitro preklapljajočih ventilov za vklop/izklop približno nadomesti proporcionalni nadzor za 60–80 % cene. Za cenovno ozaveščene aplikacije PWM z dvojnim krmiljenjem zagotavlja dobre rezultate (sinhronizacija ±2–4 mm), čeprav ne dosega povsem prave proporcionalne zmogljivosti ventila (±0,5–2 mm).
V: Kako naj ravnam v primeru neenakomerne obremenitve, ko en valj nosi večjo težo kot drugi?
Neravnovesja obremenitve do 20-30% se samodejno obravnavajo z dvojnim krmilnikom zanke – notranja zanka hitrosti prilagaja položaj ventila, da se ohrani enaka hitrost kljub različnim obremenitvam. Pri večjih neravnovesjih (>30%) upoštevajte: mehansko uravnavanje obremenitve (prilagodite pritrdilne točke), kompenzacijo predhodnega napajanja (dodajte od obremenitve odvisno prednapetost ventila) ali individualno krmiljenje tlaka (regulirajte tlak dovoda na valj). Naša inženirska ekipa Bepto lahko analizira vašo specifično porazdelitev obremenitve in priporoči optimalen pristop za vašo aplikacijo.
-
Lastnost zraka, ki omogoča spreminjanje njegovega volumna s tlakom, kar povzroča zamude in nelinearnost v pnevmatskih sistemih. ↩
-
Robustna tehnologija zaznavanja položaja, ki za merjenje razdalje uporablja interakcijo med magnetnimi polji in impulzi deformacije. ↩
-
Računski postopek za oceno hitrosti z izračunom spremembe položaja v določenem časovnem intervalu. ↩
-
Proaktivna tehnika krmiljenja, ki prilagaja sistem na podlagi referenčnega signala ali motenj, preden ti vplivajo na izhod. ↩
-
Mehanizem, ki preprečuje, da bi integralni člen PID regulatorja kopičil prekomerne napake, ko je aktuator nasičen. ↩
